
Research on a Ship Mooring Motion Suppression Method Based on an Intelligent Active Anti-Roll Platform
Abstract
:1. Introduction
2. Intelligent Mooring Motion Equation in the Time Domain
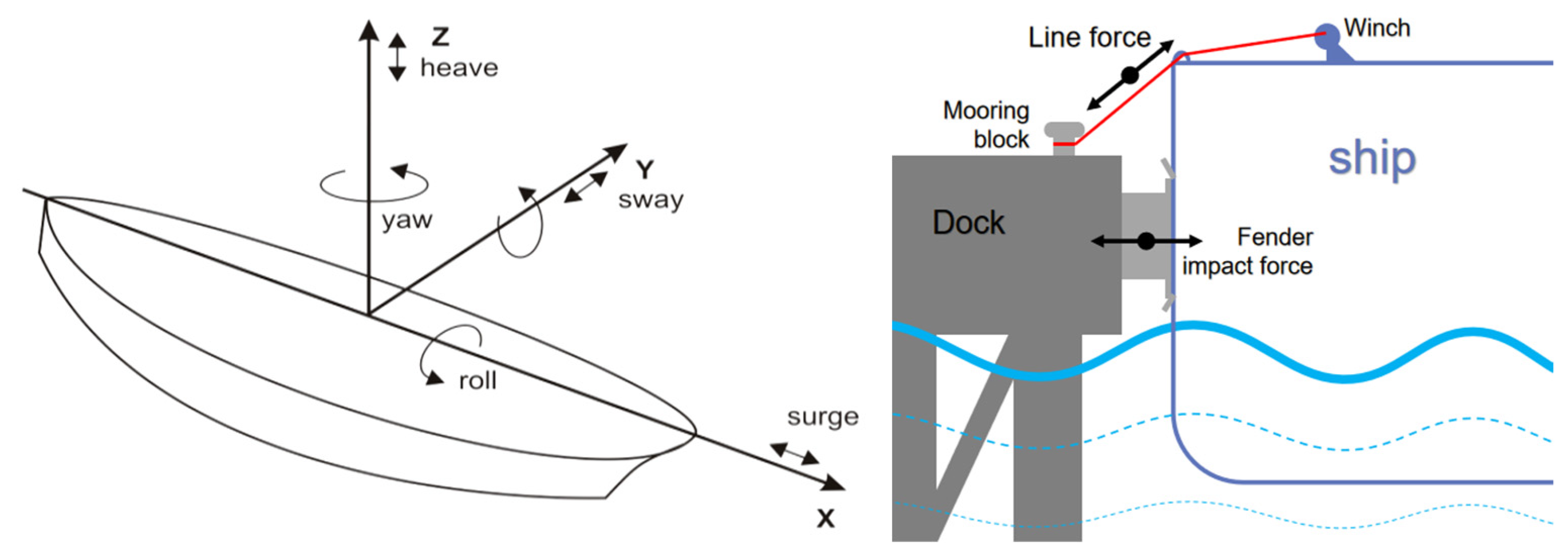
2.1. Motion of a Mooring Ship under Wave Action
2.2. Time Domain Motion Mechanics Analysis Based on Intelligent Mooring
3. Mechanism Design Based on Multi-Body Dynamics
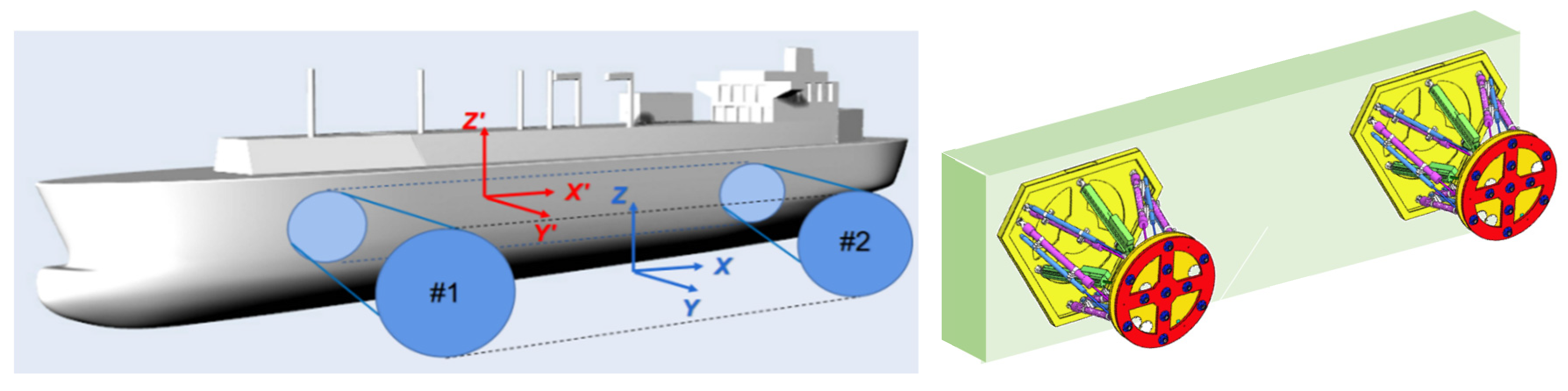
3.1. Overall Structure of the System
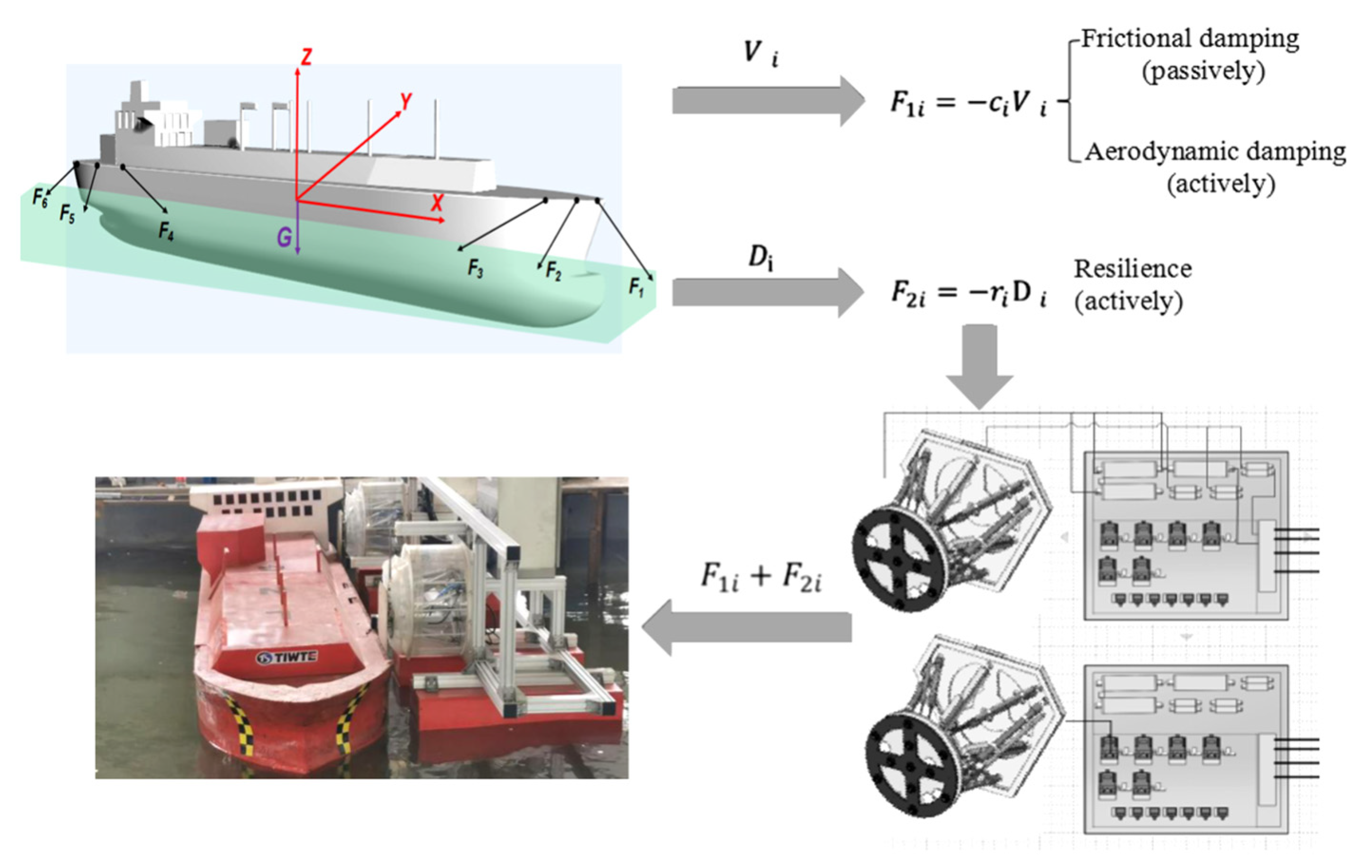
3.2. Control Strategy
- (1)
- Friction damping is provided by auxiliary branches in the parallel system, which is a passive force and cannot be controlled by the intelligent mooring system;
- (2)
- The aerodynamic damping provided by the driving branch in the parallel system is the active force, which can be interfered with by adjusting the relevant parameters of the intelligent mooring system. The damping force can inhibit the amplitude of the ship at various frequencies;
- (3)
- The constant pressure at both ends of the driving branch is maintained to provide the restoring force, which is the active force, and can be intervened by adjusting relevant parameters of the intelligent mooring system. The restoring force can change the slow drift motion of the ship into a low frequency oscillation.
4. Intelligent Algorithm and Simulation Modeling
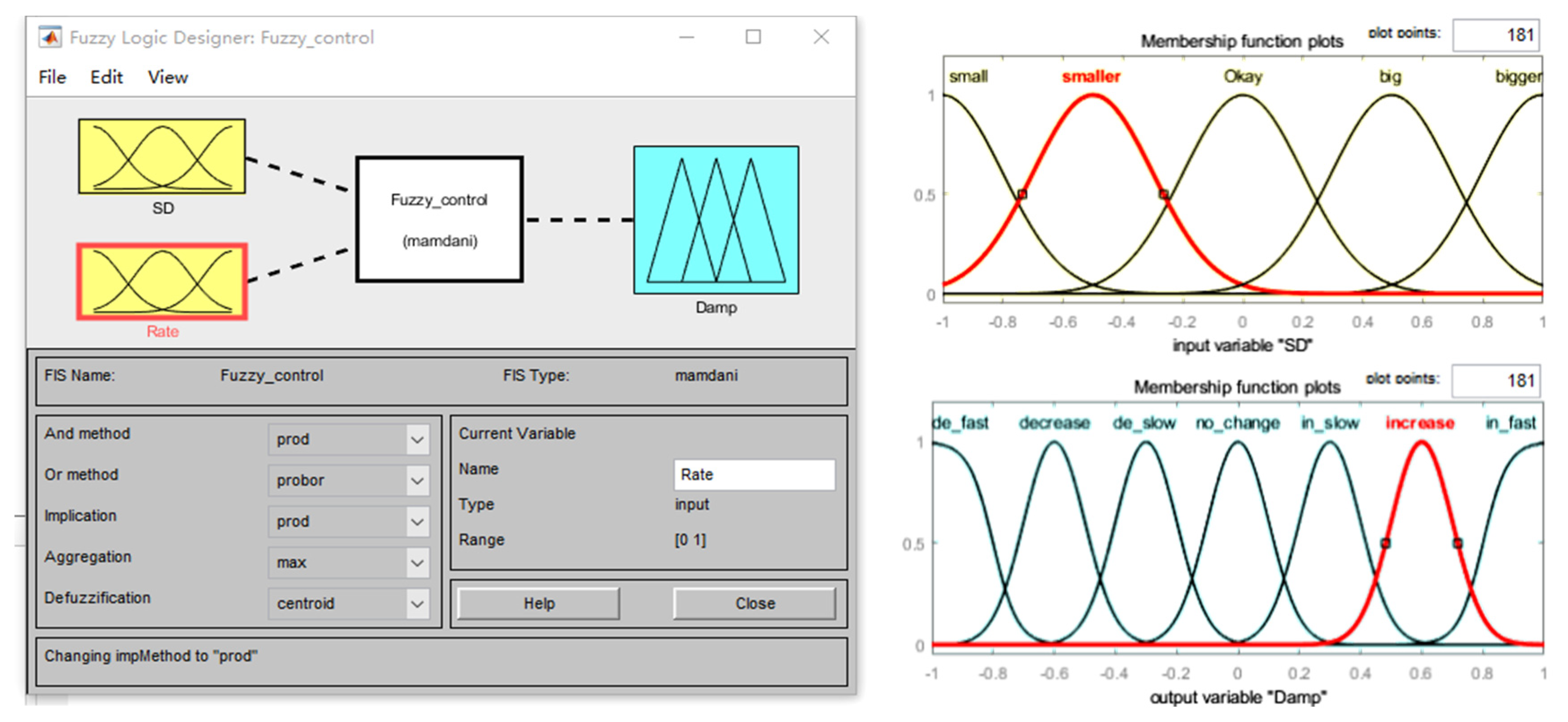
4.1. Intelligent Control Algorithm
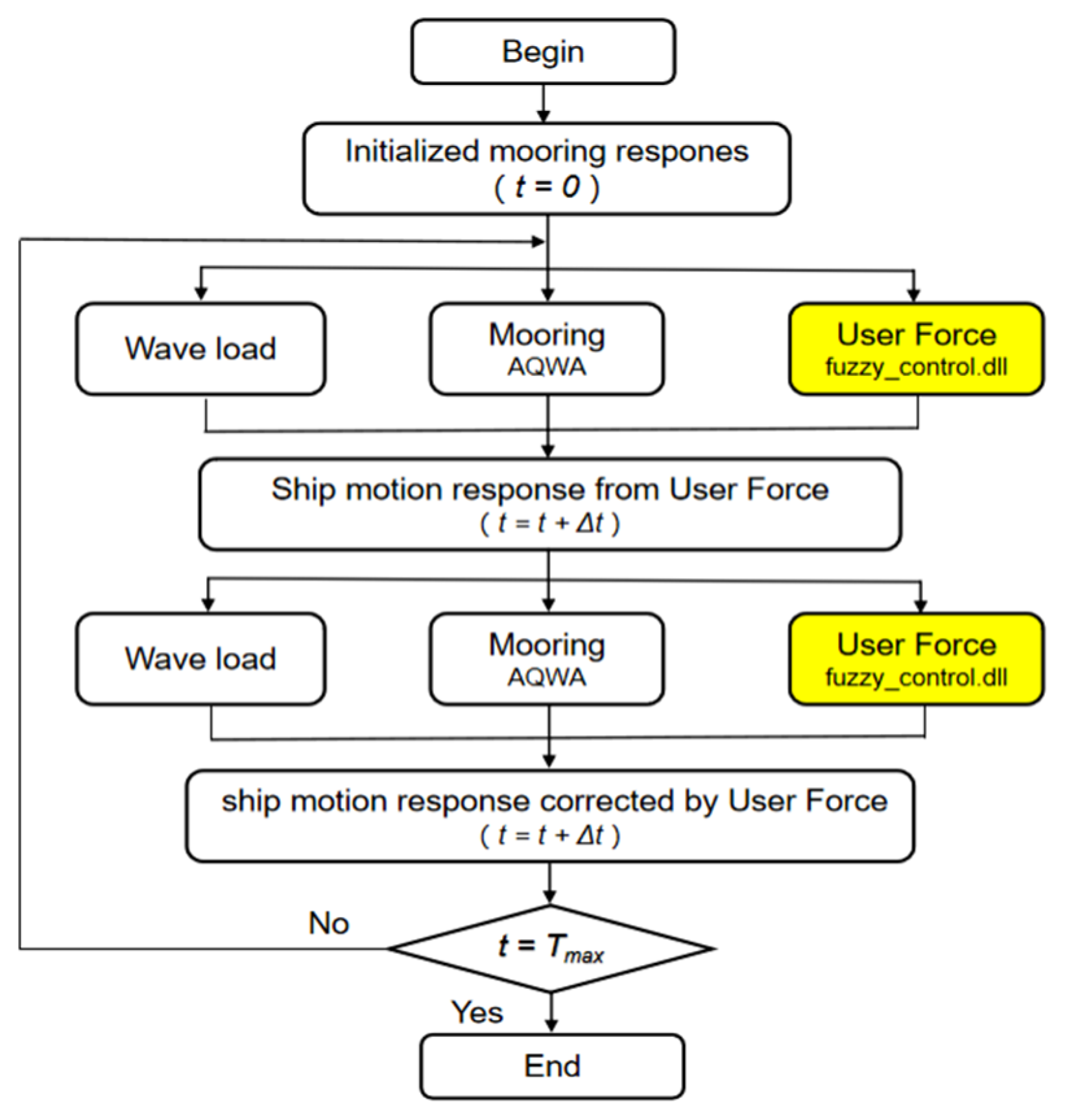
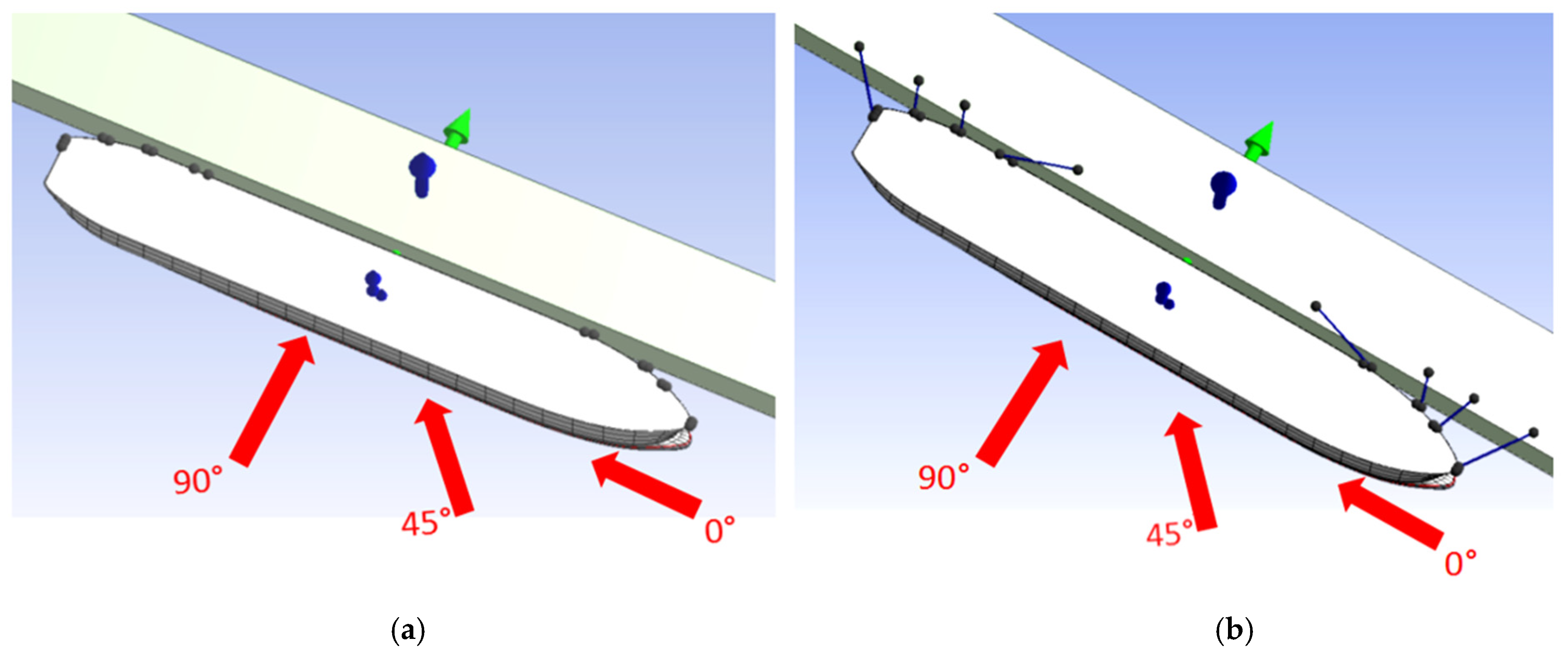
4.2. Modeling and Simulation Verification
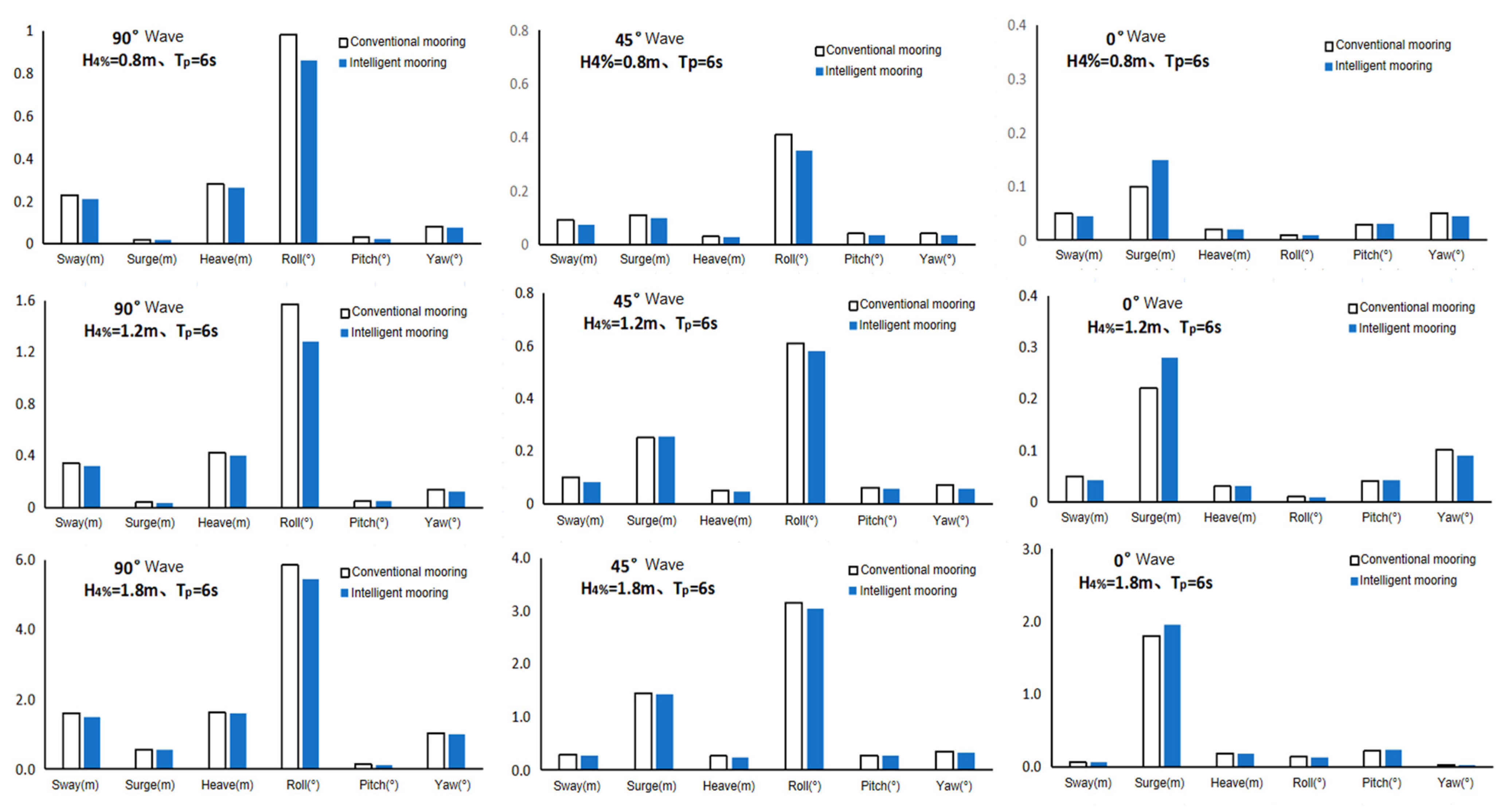
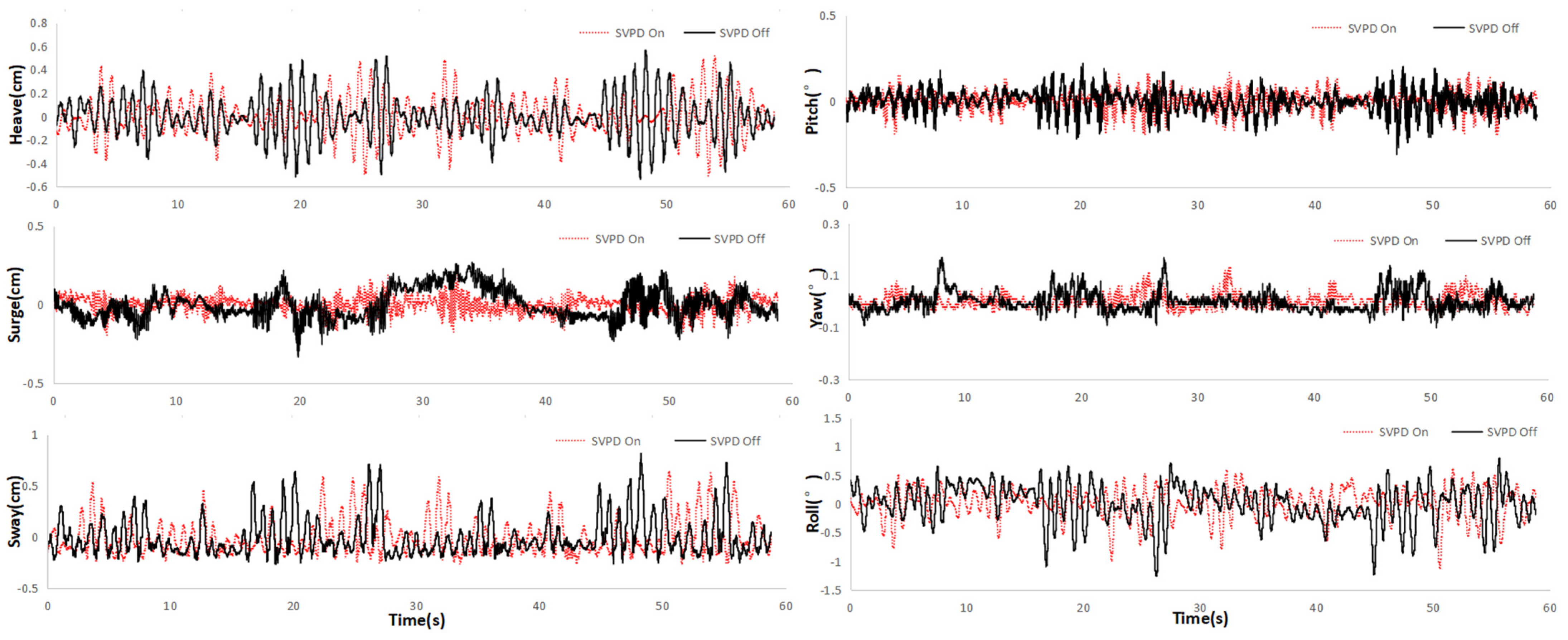
4.3. Analysis of the Simulation Test Results
5. Scale Verification Machine Model Test
5.1. About SVPD
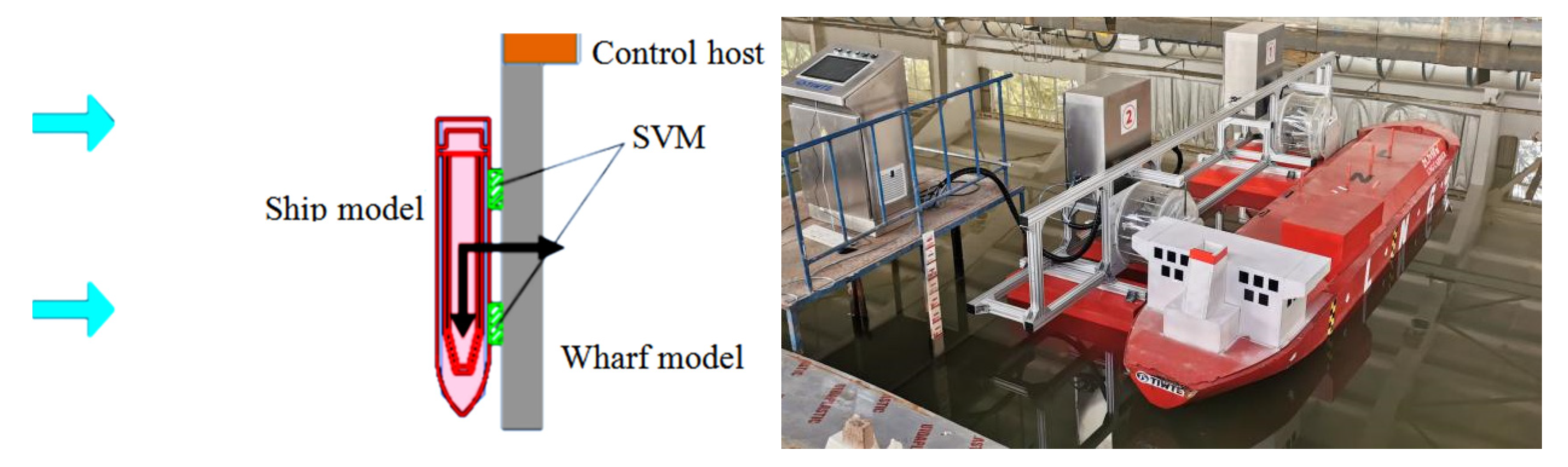
5.2. Design of the Test Model
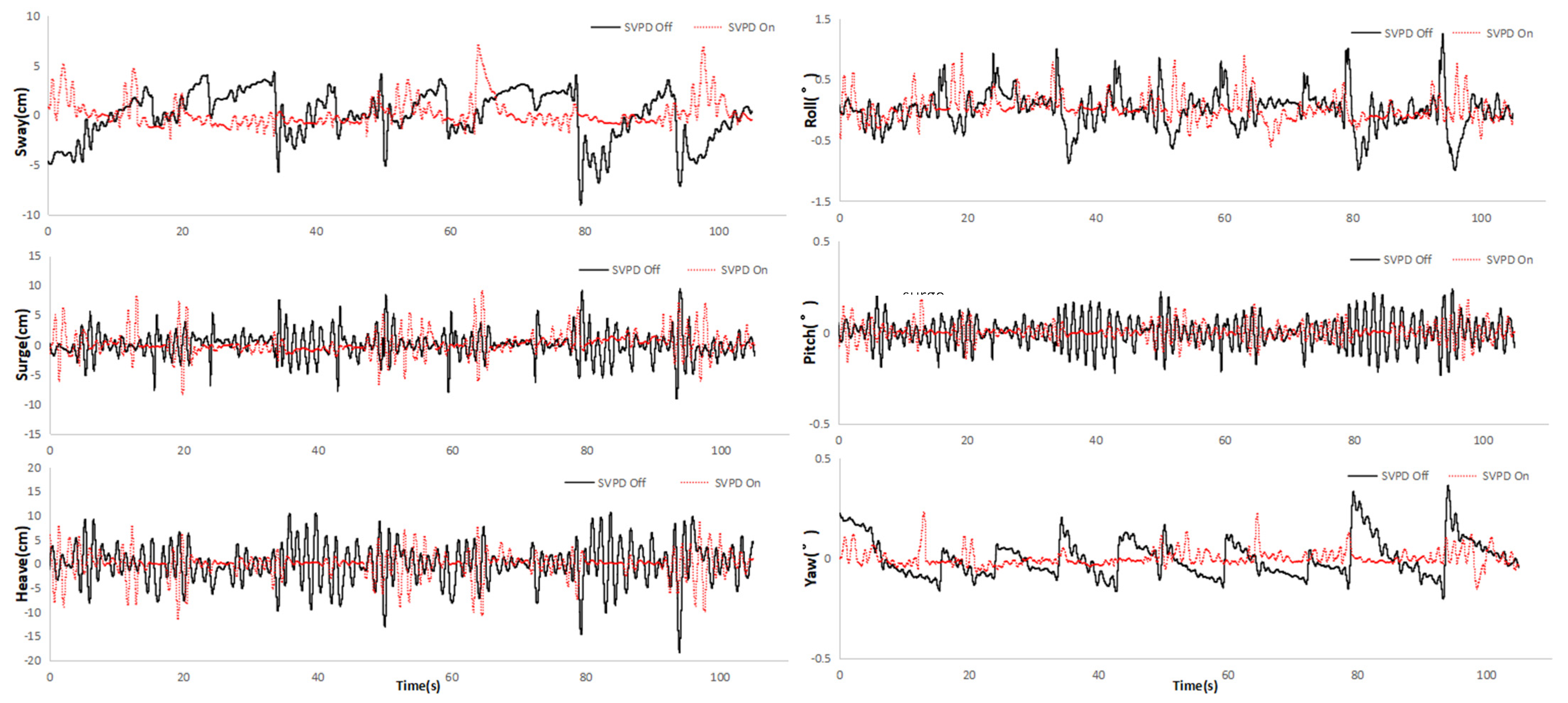
5.3. Analysis of the Test Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lian, Y.; Liu, H. Review of synthetic fiber ropes for deepwater moorings. Ocean Eng. 2019, 37, 142–154. [Google Scholar]
- He, G.; Zhang, Y.; Li, F. Key Technology of Automatic Container Terminal. Port Sci. Technol. 2017, 2, 6–18. [Google Scholar]
- Chen, Y. Analysis of development status of automated container terminal. China Water Transp. 2020, 2, 35–36. (In Chinese) [Google Scholar]
- Yang, Y.; Zhang, Q.; Nie, F. Trend analysis on automated container terminals. Chin. J. Constr. Mach. 2015, 13, 571–576. [Google Scholar]
- Qi, L. Analysis of Wharf Automatic Mooring System and its Applicability. Tianjin Navig. 2012, 2, 3–5. [Google Scholar]
- Guo, W.; Guo, X.; Ding, Y. Magnetic Control Mooring System for Ships Alongside and Leave Wharf. Chin. J. Ship Res. 2006, 1, 42–44. [Google Scholar]
- Xiang, Y. Study on Smart Mooring System; Shanghai Jiao Tong University: Shanghai, China, 2001; pp. 34–36. [Google Scholar]
- Gao, F.; Hu, K.; Zhao, T.; Ding, S.; Hu, C. Research status and development of intelligent mooring technology for port ships. China Water Transp. 2019, 19, 86–90. (In Chinese) [Google Scholar]
- Oil Companies International Marine Forum. Prediction of Wind and Current Loads on VLCCs; Witherby & Co, Ltd.: London, UK, 1994. [Google Scholar]
- Permanent International Association of Navigation Congresses. Criteria for Movements of Moored Ships in Harbors; Permanent International Association of Navigation Congresses: Nootdorp, The Netherlands, 1995. [Google Scholar]
- Zhang, X.; Zhang, G.; Sui, Y.; Chen, A.; Xu, B.; Zhang, J.; Hui, X. Analysis of Industrial Injuries to Chinese Seafarers. Navig. China 2012, 35, 113–118. [Google Scholar]
- Gao, F.; Zhao, X.; Hu, K.; Yu, B. Development trend and demand of water Transportation Technology from epidemic response. China Water Transp. 2020, 5, 16–18. (In Chinese) [Google Scholar]
- Guo, W.; Ding, Y. How to realize Automatic Docking and departure of Ships. China Water Transp. 2006, 2, 46–47. [Google Scholar]
- Yong, Y.; Choi, K.; Chung, H.; Han, S.; Lee, P.-S. A ship-to-ship automatic docking system for ocean cargo transfer. J. Mar. Sci. Technol. 2014, 19, 360–375. [Google Scholar]
- Jin, H.; Su, X.; Yu, A.; Lin, F. Design of automatic mooring positioning system based on mooring line switch. Electr. Mach. Control. 2014, 18, 93–98. [Google Scholar]
- Emma, D.; Andrés, O.; Carlos, A. Reduction in CO2, emissions in RoRo/Pax ports equipped with automatic mooring systems. Environ. Pollut. 2018, 241, 879–886. [Google Scholar]
- De Bont, J. Validation of Numerical Models for Motions of Ships Moored with MoorMasterTM Units, in a Harbour under Influence of Ocean Waves. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]
- Deyzen, A.V.; Lem, J.V.D.; Beimers, P.; Bont, J.D. The Effect of Active Motion Dampening Systems on the Behaviour of Moored Ships. In Proceedings of the PIANC World Congress, San Francisco, CA, USA, 1–5 June 2014. [Google Scholar]
- de Bont, J.; van der Molen, W.; van der Lem, C.; Muhlenstein, D.; Howie, M.; Ligteringen, H. Calculations of the Motions of a Ship Moored with MoorMaster Units. In Proceedings of the PIANC MMX Congress, Liverpool, UK, 10–14 May 2010. [Google Scholar]
- Ke, L.H. Structural Design of Automatic Mooring System and Finite Element Analysis of the System. Ph.D. Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2014. (In Chinese). [Google Scholar]
- Liu, C. Design and Analysis of Energy-Regenerative Automatic Mooring Device. Ph.D. Thesis, Yanshan University, Qinhuangdao, China, 2020. (In Chinese). [Google Scholar]
- Zhao, T.S.; Ding, S.X.; Gao, F.; Bian, H.; Wang, C.; Xu, X.; Hu, K. Research on a novel robot mooring system based on dual-parallel elastic under-actuated mechanisms. Appl. Ocean Res. 2022, 119, 103020. [Google Scholar] [CrossRef]
- Xin, S. Numerical Simulation on Hydrodynamic Response of Berthing Ships. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2005. (In Chinese). [Google Scholar]
- Cummins, W.E. The impulsive response function and ship motions. In Proceedings of the Symposium on Ship Theory at the Institut flir Schiffbau der Universitit Hamburg, Hamburg, Germany, 25–27 January 1962; pp. 25–27. [Google Scholar]
- Liu, G. Analysis and Optimization Design of Gough-Stewart Platform; Northwestern Polytechnical University Press: Xi’an, China, 2019. (In Chinese) [Google Scholar]
- Liu, X. Basic Theoretical and Experimental Investigation on Ship-Based Stabilizing Platform with 6-PUS Parallel Mechanism; Yanshan University: Qinhuangdao, China, 2014. [Google Scholar]
- Ding, J. Research on Dynamic Modeling and Control Strategy of Ship Borne 6-DOF Stable Platform; Yanshan University: Qinhuangdao, China, 2020. [Google Scholar]
- Gao, F.; Hu, K.; Shen, W.; Li, Y. Study on the Safety Guarantee of Ship Mooring from Frequent Cable Accidents. IOP Conf. Ser. Earth Environ. Sci. 2021, 621, 012007. [Google Scholar] [CrossRef]
- Wang, C.; Jin, H.; Wang, T. Dynamic Response Analysis of Offshore Turbine with TLP FloaterConsidering Wind and Wave. Ship Sci. Technol. 2019, 41, 75–79. (In Chinese) [Google Scholar]
- Yang, Y.; Bashir, M.; Wang, J.; Michailides, C.; Loughney, S.; Armin, M.; Sergio Hernández, S.; Urbano, J.; Li, C. Wind-wave coupling effects on the fatigue damage of tendons for a 10 MW multi-body floating wind turbine. Ocean Eng. 2020, 217, 107909. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation | Ship | Unit |
|---|---|---|
| LOA. | 315 | m |
| LPP. | 290 | m |
| Breath | 50 | m |
| Depth | 27 | m |
| Draft | 12.0 | m |
| Displacement | 146,871.2 | t |
| Roll period | 14.92 | s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, F.; Tang, Y.; Hu, C.; Xie, X. Research on a Ship Mooring Motion Suppression Method Based on an Intelligent Active Anti-Roll Platform. Appl. Sci. 2023, 13, 7979. https://doi.org/10.3390/app13137979
Gao F, Tang Y, Hu C, Xie X. Research on a Ship Mooring Motion Suppression Method Based on an Intelligent Active Anti-Roll Platform. Applied Sciences. 2023; 13(13):7979. https://doi.org/10.3390/app13137979
Chicago/Turabian StyleGao, Feng, Yougang Tang, Chuanqi Hu, and Xiaolei Xie. 2023. "Research on a Ship Mooring Motion Suppression Method Based on an Intelligent Active Anti-Roll Platform" Applied Sciences 13, no. 13: 7979. https://doi.org/10.3390/app13137979