
Underwater Target Recognition via Cayley-Klein Measure and Shape Prior Information in Hyperspectral Imaging
Abstract
:1. Introduction
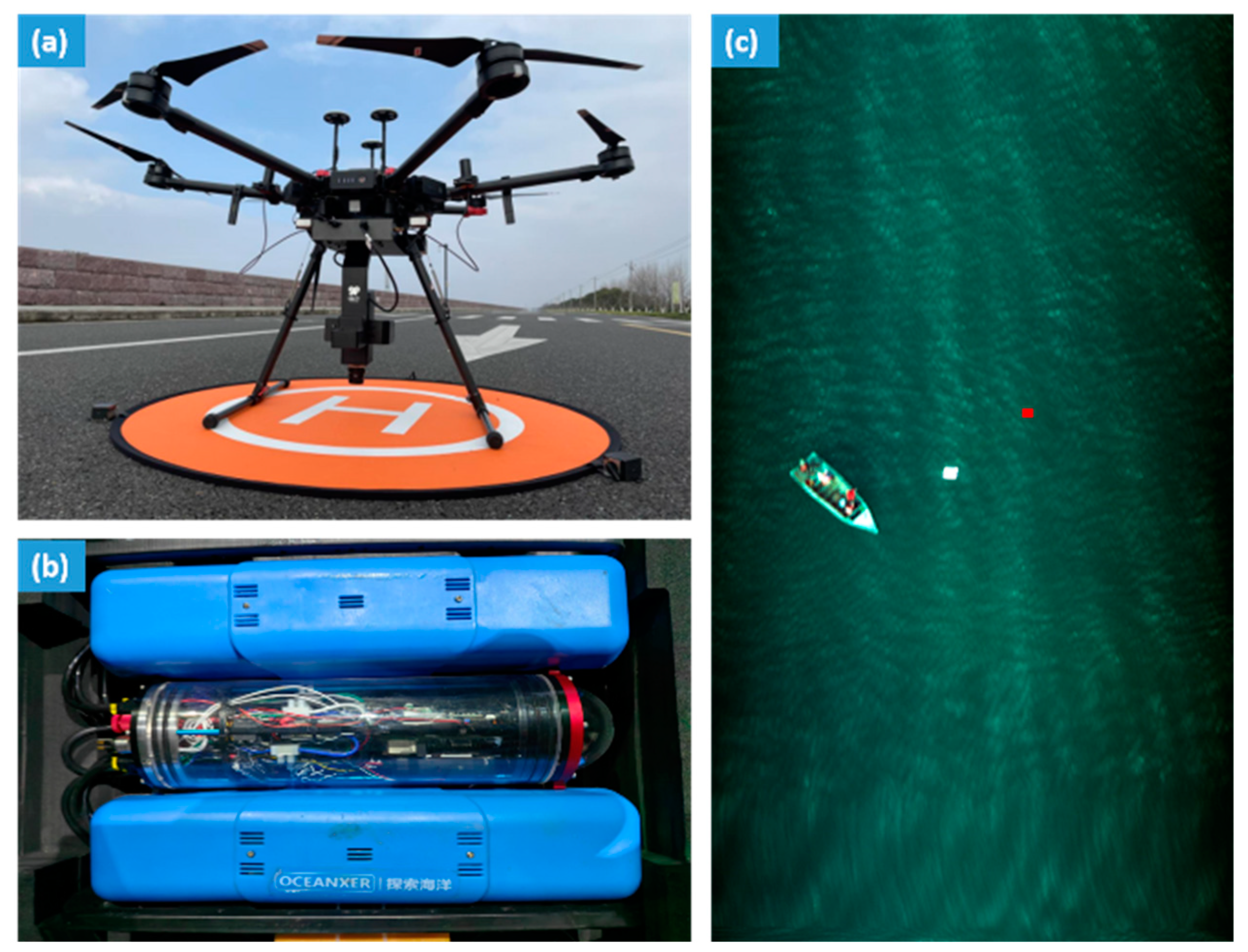
2. Study Area and Data
3. Method of Recognition
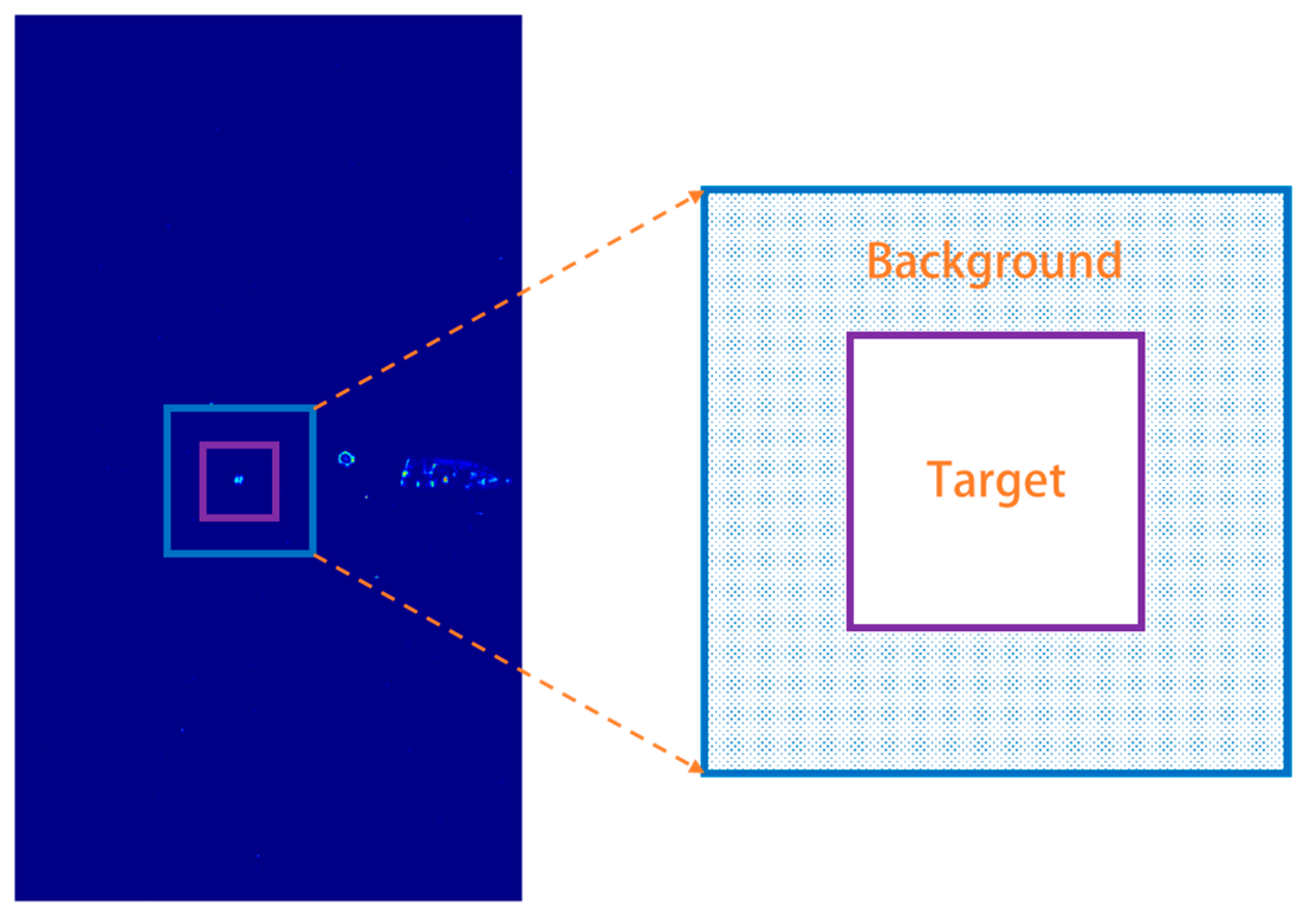
3.1. Hyperspectral Background Field Suppression Based on Cayley–Klein Measure
3.2. Local Peak Detection Algorithm for Target Points
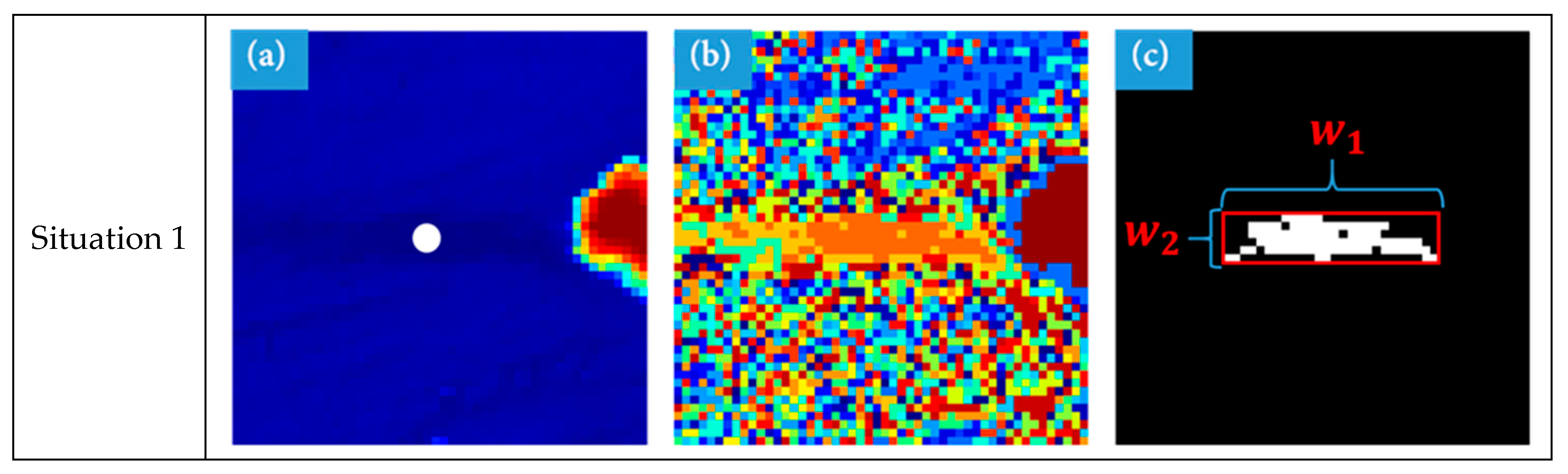
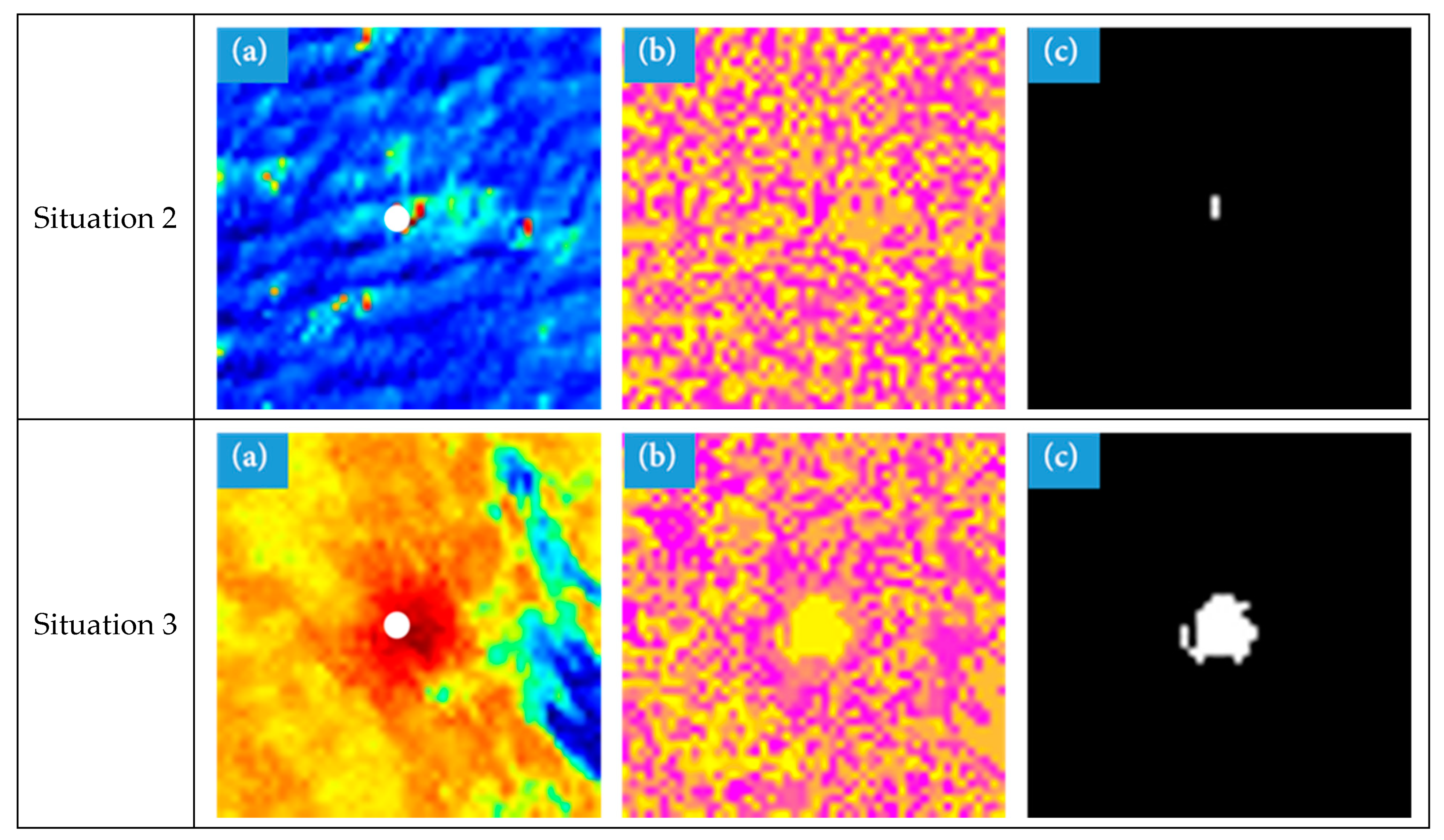
3.3. Pseudo-Target Criterion Based on Shape Prior Information
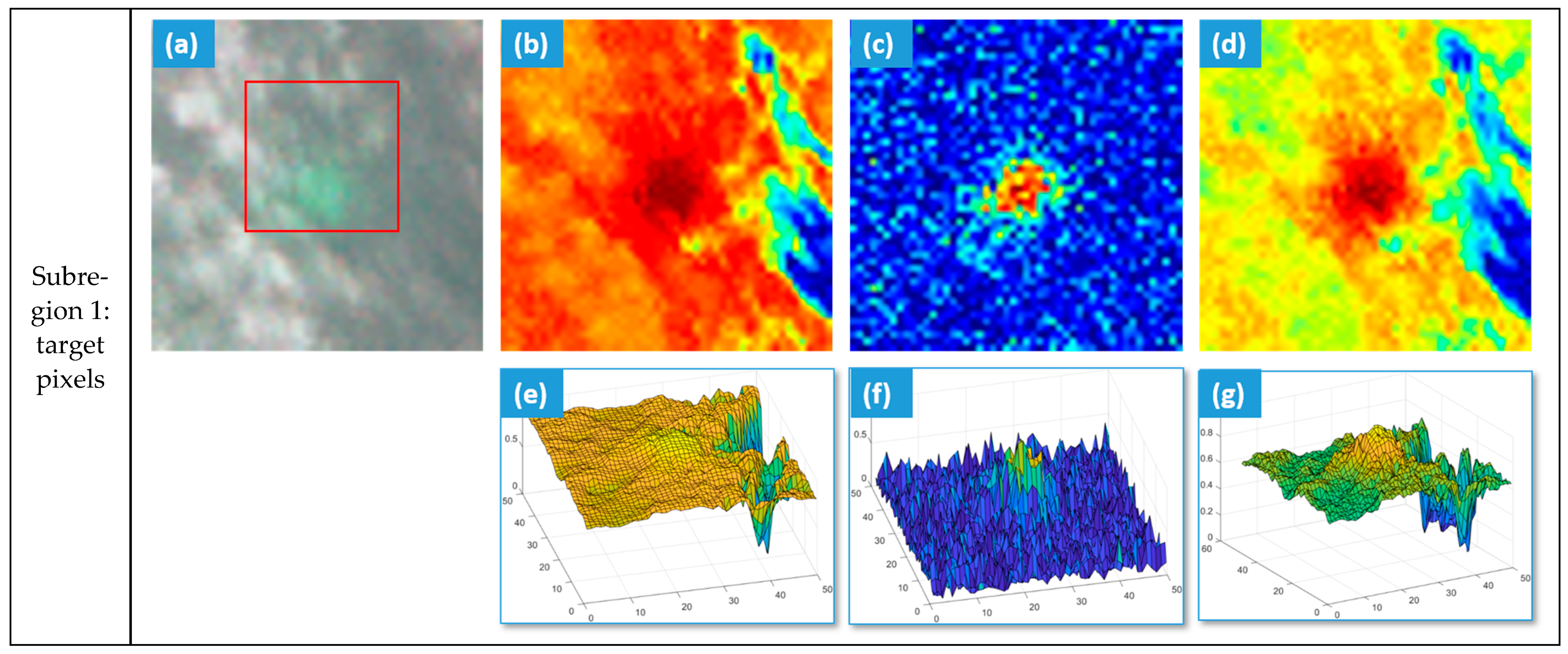
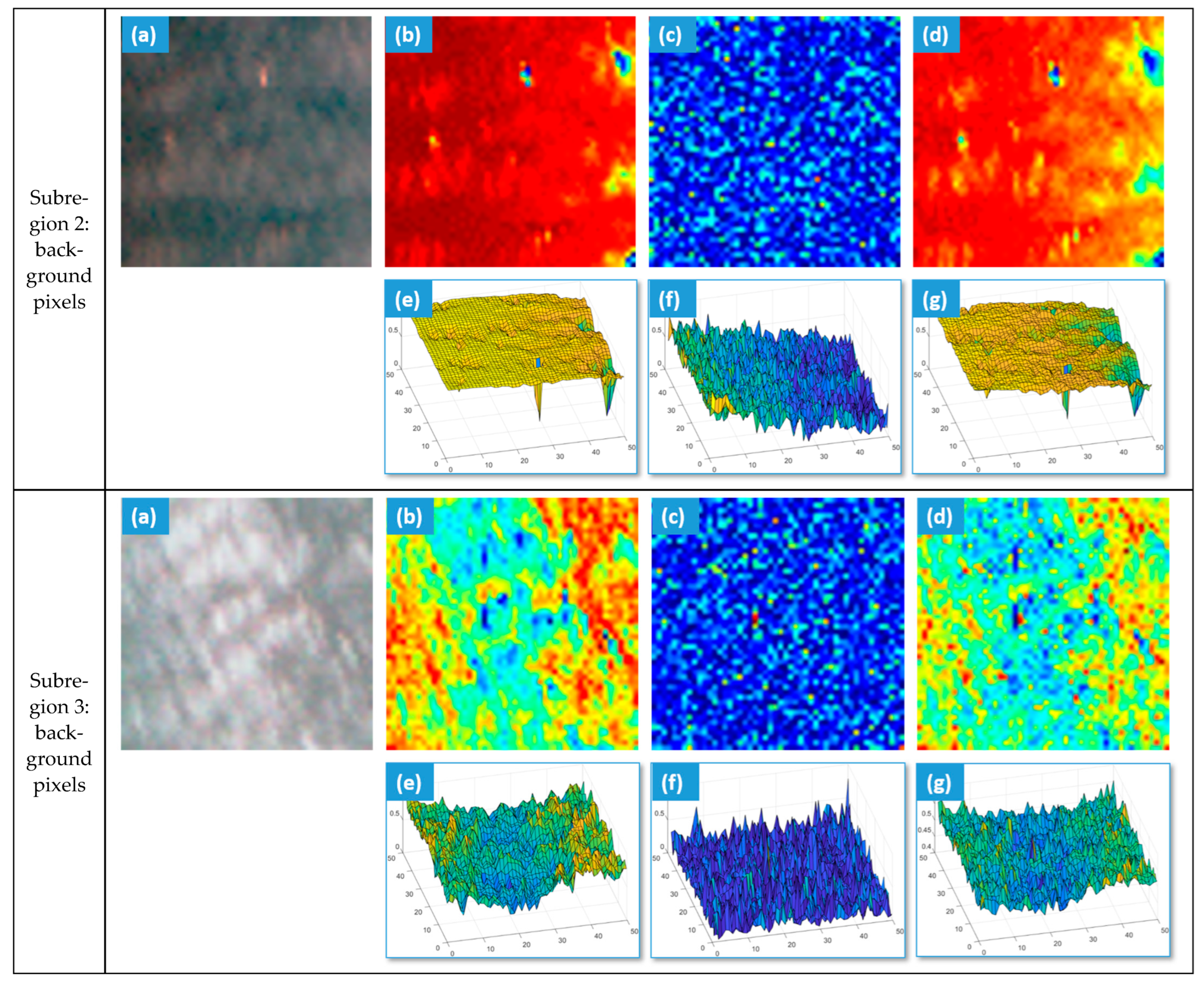
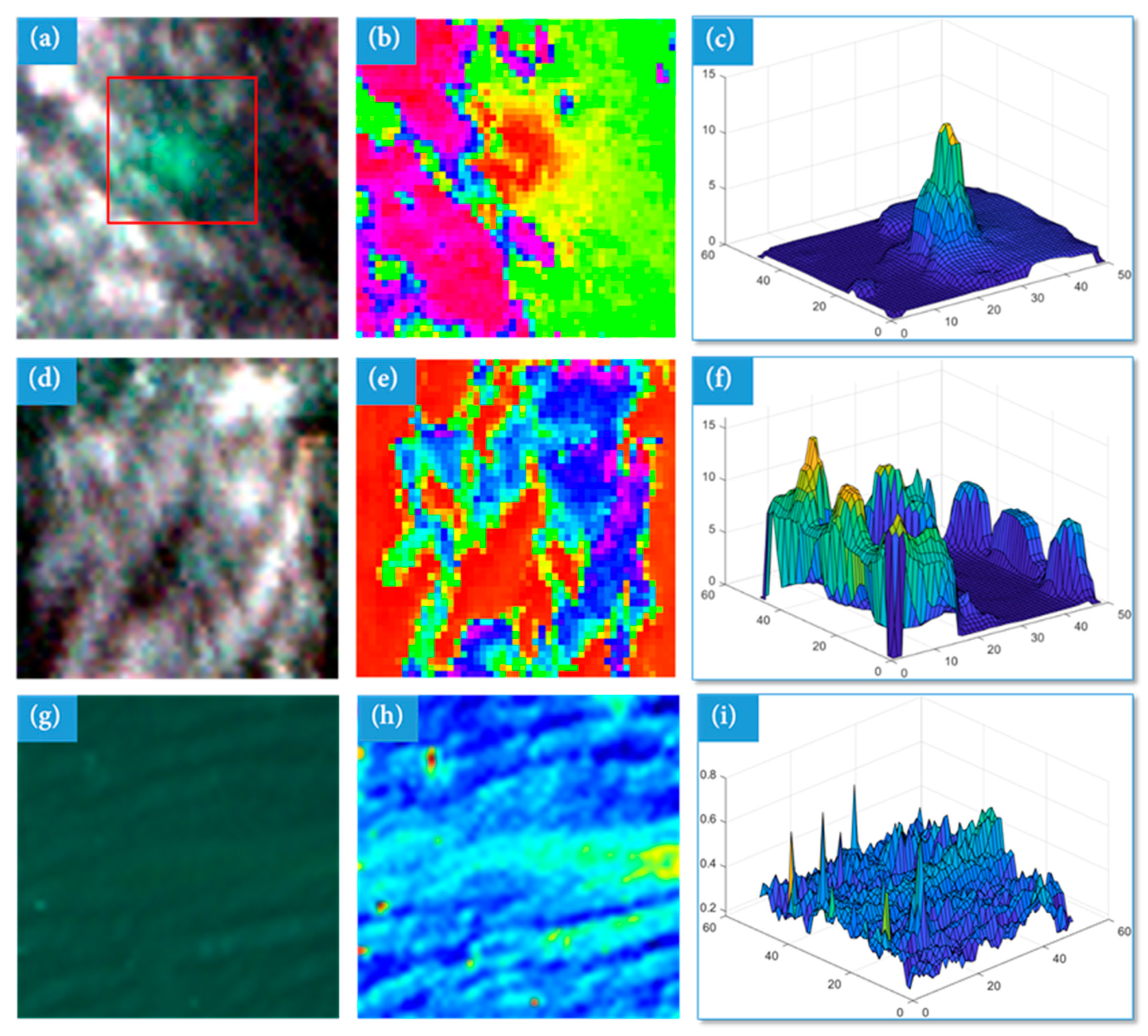
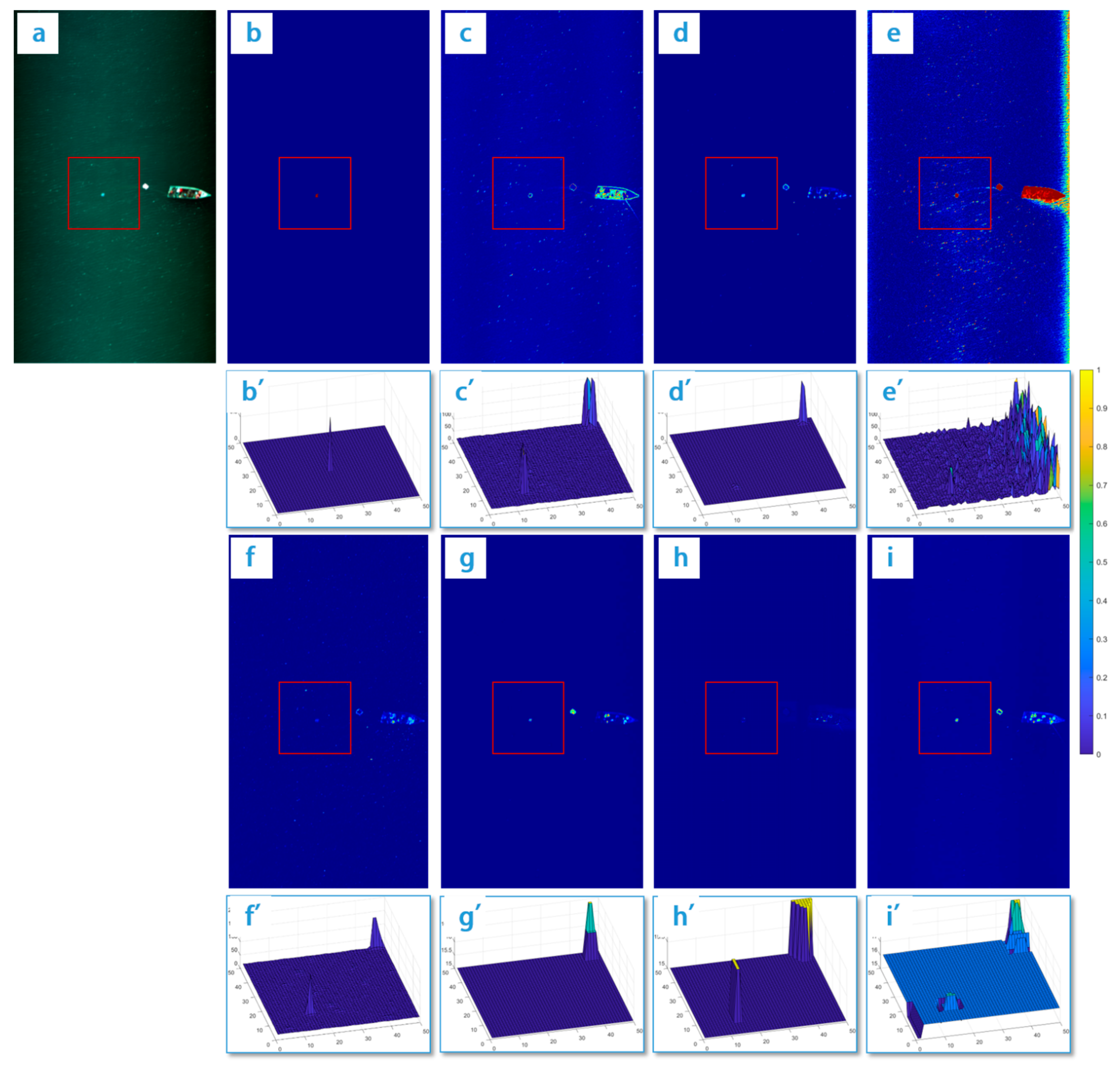
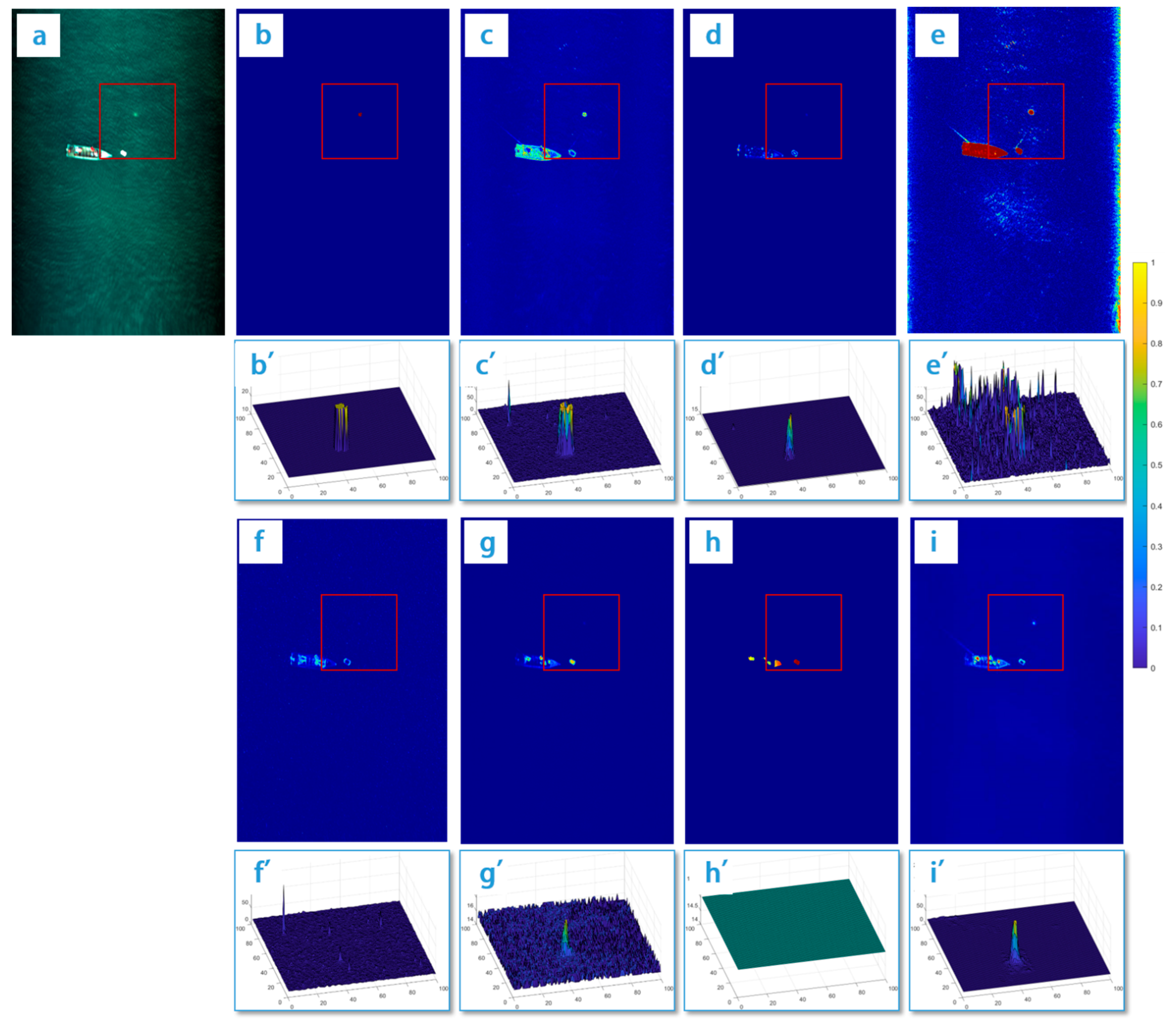
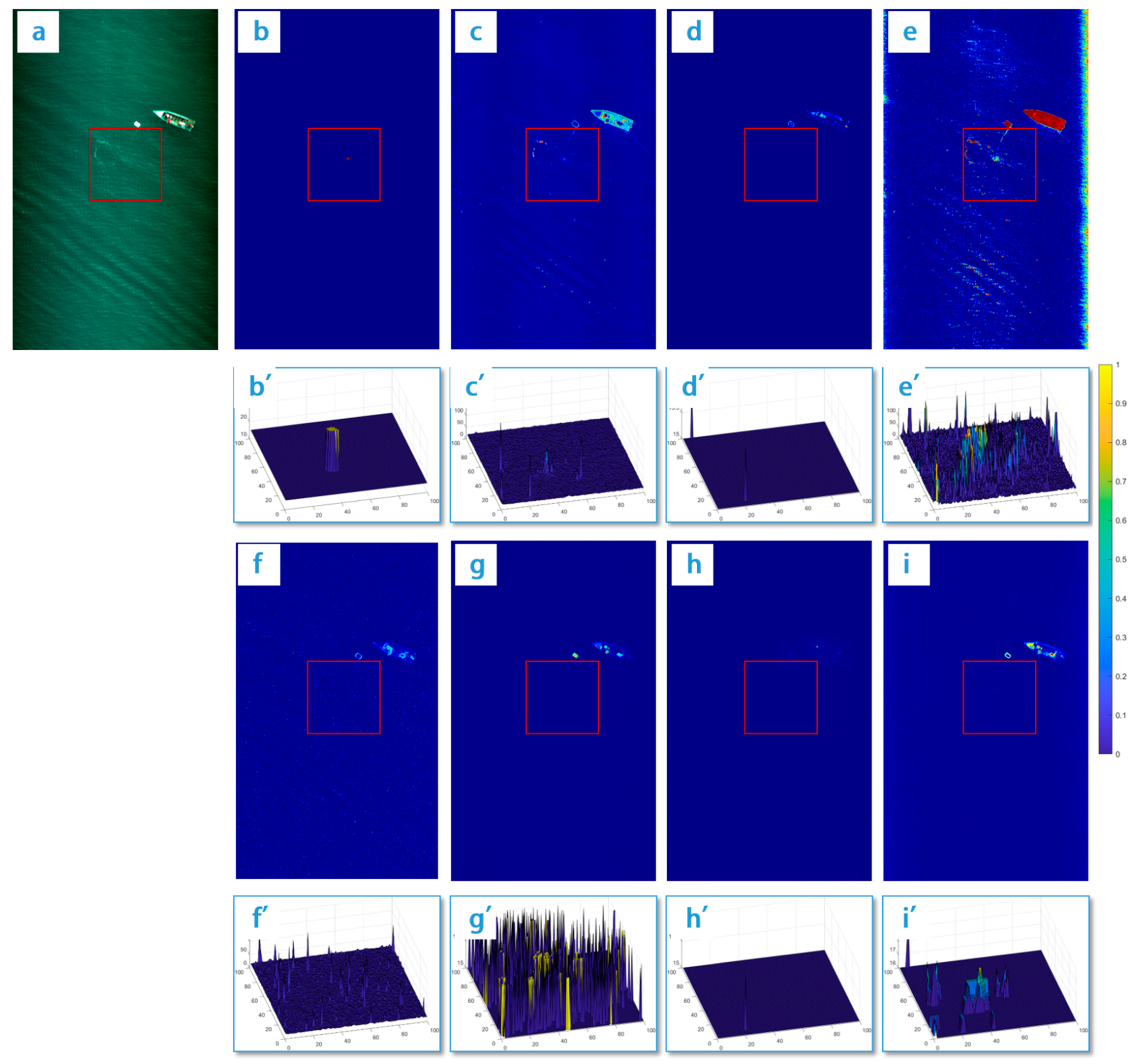
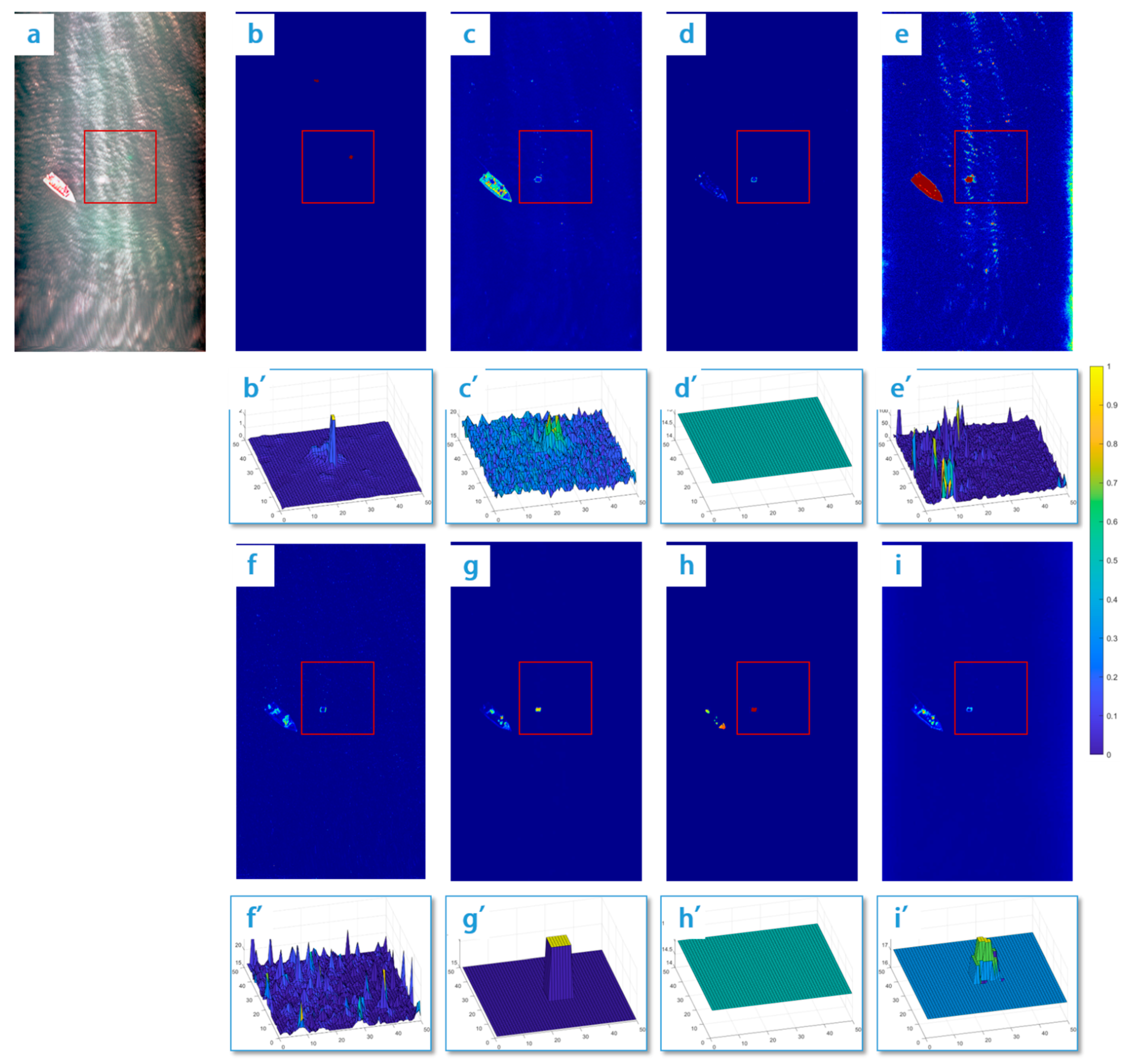
4. Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, L. Advance and Future Challenges in Hyperspectral Target Detection. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 1387–1400. [Google Scholar]
- Nasrabadi, N.M. Hyperspectral target detection: An overview of current and future challenges. IEEE Signal Process. Mag. 2013, 31, 34–44. [Google Scholar] [CrossRef]
- Kwon, H.; Nasrabadi, N.M. Kernel matched subspace detectors for hyperspectral target detection. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 28, 178–194. [Google Scholar] [CrossRef]
- Zhu, D.; Du, B.; Zhang, L. Target dictionary construction-based sparse representation hyperspectral target detection methods. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1254–1264. [Google Scholar] [CrossRef]
- Sun, S.; Liu, J.; Sun, S. Hyperspectral Subpixel Target Detection Based on Interaction Subspace Model. Pattern Recognit. 2023, 139, 109464. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, P.; Liu, N.; Yin, Q.; Zhang, F. Graph-Embedding Balanced Transfer Subspace Learning for Hyperspectral Cross-Scene Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2944–2955. [Google Scholar] [CrossRef]
- Hu, X.; Xie, C.; Fan, Z.; Duan, Q.; Zhang, D.; Jiang, L.; Wei, X.; Hong, D.; Li, G.; Zeng, X. Hyperspectral anomaly detection using deep learning: A review. Remote Sens. 2022, 14, 1973. [Google Scholar] [CrossRef]
- Li, K.; Ling, Q.; Qin, Y.; Wang, Y.; Cai, Y.; Lin, Z.; An, W. Spectral-spatial deep support vector data description for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5522316. [Google Scholar] [CrossRef]
- Wu, Z.; Su, H.; Tao, X.; Han, L.; Paoletti, M.E.; Haut, J.M.; Plaza, J.; Plaza, A. Hyperspectral anomaly detection with relaxed collaborative representation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5533417. [Google Scholar] [CrossRef]
- Zhang, H.-K.; Li, Y.; Jiang, Y.-N. Deep Learning for Hyperspectral Imagery Classification: The State of the Art and Prospects. Acta Autom. Sin. 2018, 44, 961–977. [Google Scholar]
- Jia, S.; Jiang, S.; Lin, Z.; Li, N.; Xu, M.; Yu, S. A survey: Deep learning for hyperspectral image classification with few labeled samples. Neurocomputing 2021, 448, 179–204. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.; Mobley, C.; Steward, R.; Patch, J. Hyperspectral remote sensing for shallow waters. ii. deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [Green Version]
- Adler-Golden, S.; Acharya, P.; Berk, A.; Matthew, M.; Gorodetzky, D. Remote bathymetry of the littoral zone from A VIRIS, LASH and QuickBird imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 337–347. [Google Scholar] [CrossRef]
- Kallio, K.; Kutser, T.; Hannonen, T.; Koponen, S.; Pul-liainen, J.; Vepsäläinen, J.; Pyhälahti, T. Retrieval of water quality from airborne imaging spectrometry of various lake types in different seasons. Sci. Total Environ. 2001, 268, 59–77. [Google Scholar] [CrossRef] [PubMed]
- Vahtmäe, E.; Kutser, T.; Martin, G.; Kotta, J. Feasibility of hyperspectral remote sensing for mapping benthic macroalgal cover in turbid coastal waters—A baltic sea case study. Remote Sens. Environ. 2008, 101, 342–351. [Google Scholar] [CrossRef]
- David, G. An Underwater Target Detection Framework for Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1798–1810. [Google Scholar]
- De Maesschalck, R.; Jouan-Rimbaud, D.; Massart, D.L. The Mahalanobis distance. Chemomeasures Intell. Lab. Syst. 2000, 50, 1–18. [Google Scholar] [CrossRef]
- Struve, H.; Struve, R. Projective spaces with Cayley-Klein metrics. J. Geom. 2004, 81, 155–167. [Google Scholar] [CrossRef]
- Bi, Y.; Fan, B.; Wu, F. Beyond Mahalanobis metric: Cayley-Klein metric learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 2339–2347. [Google Scholar]
- Bi, Y.; Fan, B.; Wu, F. Multiple Cayley-Klein metric learning. PLoS ONE 2017, 12, e0184865. [Google Scholar] [CrossRef] [Green Version]
- Mika, S.; Ratsch, G.; Weston, J.; Scholkopf, B.; Mullers, K.-R. Fisher discriminant analysis with kernels. Neural Networks for Signal Processing IX. In Proceedings of the 1999 IEEE Signal Processing Society Workshop (Cat. No. 98th8468), Madison, WI, USA, 25 August 1999; pp. 41–48. [Google Scholar]
- Patibandla, R.S.M.; Veeranjaneyulu, N. A SimRank based ensemble method for resolving challenges of partition clustering methods. J. Sci. Ind. Res. 2022, 79, 323–327. [Google Scholar]
- Kriegel, H.; Kröger, P.; Sander, J.; Zimek, A. Density-based clustering. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2011, 1, 231–240. [Google Scholar] [CrossRef]
- Liu, Y.; Tu, W.; Zhou, S.; Liu, X.; Song, L.; Yang, X.; Zhu, E. Deep graph clustering via dual correlation reduction. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 22 February–1 March 2022; Volume 36, pp. 7603–7611. [Google Scholar]
- Cheng, M.; Ma, T.; Ma, L.; Yuan, J.; Yan, Q. Adaptive grid-based forest-like clustering algorithm. Neurocomputing 2022, 481, 168–181. [Google Scholar] [CrossRef]
- Zhao, X.; Nie, F.; Wang, R.; Li, X. Improving projected fuzzy K-means clustering via robust learning. Neurocomputing 2022, 491, 34–43. [Google Scholar] [CrossRef]
- Ouyang, T.; Shen, X. Online structural clustering based on DBSCAN extension with granular descriptors. Inf. Sci. 2022, 607, 688–704. [Google Scholar] [CrossRef]
- Rodriguez, A.; Laio, A. Clustering by fast search and find of density peaks. Science 2014, 344, 1492–1496. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Yu, Z.; Chen CL, P.; You, J.; Gu, T.; Wong, H.-S.; Zhang, J. Clustering by local gravitation. IEEE Trans. Cybern. 2017, 48, 1383–1396. [Google Scholar] [CrossRef]
- Campbell, J.B.; Wynne, R.H. Introduction to Remote Sensing; Guilford Press: New York, NY, USA, 2011. [Google Scholar]
- Li, S.; Zhang, K.; Duan, P.; Kang, X. Hyperspectral anomaly detection with kernel isolation forest. IEEE Trans. Geosci. Remote Sens. 2019, 58, 319–329. [Google Scholar] [CrossRef]
- Xiang, P.; Song, J.; Qin, H.; Tan, W.; Li, H.; Zhou, H. Visual attention and background subtraction with adaptive weight for hyperspectral anomaly detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2270–2283. [Google Scholar] [CrossRef]
- Yuan, S.; Shi, L.; Yao, B.; Li, F.; Du, Y. A hyperspectral anomaly detection algorithm using sub-features grouping and binary accumulation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 6007505. [Google Scholar] [CrossRef]
- Hou, Z.; Cheng, S.; Hu, T. A spectral-spatial fusion anomaly detection method for hyperspectral imagery. arXiv 2022, arXiv:2202.11889. [Google Scholar]
- Guo, Q.; Zhang, B.; Ran, Q.; Gao, L.; Li, J.; Plaza, A. Weighted-RXD and linear filter-based RXD: Improving background statistics estimation for anomaly detection in hyperspectral imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2351–2366. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, Z.; Li, J.; Plaza, A.; Wei, Z. Anomaly detection in hyperspectral images based on low-rank and sparse representation. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1990–2000. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Imaging Mode | Dispersive Push-Broom Mode |
|---|---|
| Spectral range | 400–1000 nm |
| Spectral resolution | 2.8 nm |
| Spatial resolution | 7 cm |
| Number of spatial pixels | 1920 (1×), 480 (4×) |
| Number of spectral bands | 1200 (1×), 300 (4×) |
| Slit | 25 μm |
| Relative aperture | F2.6 |
| Output pixel bit depth | 12 bits |
| Maximum frame rate (full spectrum acquisition) | 128 fps |
| Lens focal length | 12.5 mm/35 mm interchangeable. |
| Height of UAV | 100 m |
| Depth of the Target | Number of the Samples |
|---|---|
| 0.1 m | 65 |
| 1.5 m | 23 |
| 3 m | 17 |
| 5 m | 53 |
| Image | Indicators | Proposed Algorithm | Kernel IF | VABS | SFBA | SSFAD | Global RX | SRX_LOCAL | LRASR |
|---|---|---|---|---|---|---|---|---|---|
| #1 Depth: 0.1 m | FNR | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| FPR | 0 | 0.95 | 0.95 | 0.99 | 0.93 | 0.94 | 0.94 | 0.92 | |
| SCR | 0.39 | 5.23 | \ | 0.82 | 4.06 | 228.71 | 26.82 | 112.52 | |
| #2 Depth: 1.5 m | FNR | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| FPR | 0 | 0.96 | 0.95 | 0.94 | 0.94 | 0.92 | 0.83 | 0.99 | |
| SCR | 4.95 | 4.34 | 12.12 | 1.13 | 0.80 | 2.71 | \ | 9.95 | |
| #3 Depth: 3.5 m | FNR | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 1 |
| FPR | 0 | 0.97 | 0.95 | 0.95 | 0.88 | 0.95 | 0.95 | 0.94 | |
| SCR | 3.66 | 0.10 | \ | 0.12 | 0.08 | 0.14 | 0.47 | \ | |
| #4 Depth: 5.0 m | FNR | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 1 |
| FPR | 0.5 | 0.97 | 1 | 1 | 1 | 0.98 | 1 | 1 | |
| SCR | 1.59 | 0.80 | \ | 0.04 | 0.04 | \ | \ | \ |
| Experimental Area | Repeated Times | Computational Cost (s) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Proposed Algorithm | Kernel IF | VABS | SFBA | SSFAD | Global RX | SRX_LOCAL | LRASR | ||
| #1 Water depth: 0.1 m | 1st | 55.11 | 724.40 | 88.85 | 3.26 | 1404.55 | 1.88 | 2421.82 | 2799.84 |
| 2nd | 53.84 | 726.09 | 96.75 | 3.07 | 1504.59 | 1.70 | 2439.65 | 3099.21 | |
| 3rd | 32.06 | 778.06 | 90.03 | 3.40 | 1390.04 | 1.81 | 2355.66 | 2762.05 | |
| 4th | 50.43 | 807.57 | 90.59 | 3.20 | 1454.75 | 1.74 | 2121.74 | 2814.04 | |
| 5th | 40.73 | 770.78 | 97.46 | 3.23 | 1552.87 | 2.14 | 2488.19 | 3010.86 | |
| Mean value | 46.43 | 761.38 | 92.74 | 3.23 | 1461.36 | 1.85 | 2365.41 | 2897.20 | |
| Variance | 9.81 | 35.75 | 4.05 | 0.12 | 68.19 | 0.17 | 144.26 | 148.65 | |
| #2 Water depth: 1.5 m | 1st | 40.50 | 615.51 | 77.93 | 3.01 | 1108.57 | 1.66 | 2002.57 | 2520.30 |
| 2nd | 36.58 | 650.14 | 80.00 | 2.99 | 1248.18 | 1.98 | 1970.78 | 2390.84 | |
| 3rd | 43.65 | 600.27 | 65.13 | 3.09 | 1149.64 | 1.96 | 2112.07 | 2371.72 | |
| 4th | 34.13 | 705.45 | 65.93 | 2.99 | 1335.02 | 2.20 | 1815.17 | 2384.53 | |
| 5th | 36.49 | 617.42 | 76.43 | 3.07 | 1168.50 | 1.98 | 2045.39 | 2199.38 | |
| Mean value | 38.27 | 637.76 | 73.08 | 3.03 | 1201.98 | 1.96 | 1989.20 | 2373.35 | |
| Variance | 3.78 | 41.98 | 7.02 | 0.05 | 90.02 | 0.19 | 110.75 | 114.34 | |
| #3 Water depth: 3.0 m | 1st | 82.76 | 586.69 | 67.53 | 3.01 | 1061.49 | 1.52 | 1602.40 | 2122.90 |
| 2nd | 84.46 | 574.11 | 61.41 | 3.02 | 1098.43 | 1.43 | 1607.27 | 1910.10 | |
| 3rd | 85.83 | 543.97 | 80.64 | 3.30 | 970.73 | 1.67 | 1656.37 | 2055.71 | |
| 4th | 67.14 | 547.13 | 71.56 | 3.15 | 1020.24 | 1.85 | 1559.98 | 1952.88 | |
| 5th | 78.78 | 588.93 | 76.66 | 3.01 | 1034.11 | 1.48 | 1599.74 | 2133.14 | |
| Mean value | 79.79 | 568.17 | 71.56 | 3.10 | 1037.00 | 1.59 | 1605.15 | 2034.95 | |
| Variance | 7.55 | 21.43 | 7.55 | 0.13 | 47.58 | 0.17 | 34.30 | 100.16 | |
| #4 Water depth: 5.0 m | 1st | 91.83 | 676.29 | 92.23 | 3.17 | 1326.47 | 1.87 | 1926.32 | 2417.60 |
| 2nd | 82.01 | 677.01 | 101.58 | 3.10 | 1294.71 | 1.87 | 1834.17 | 2337.64 | |
| 3rd | 89.96 | 656.63 | 87.33 | 3.50 | 1342.93 | 2.06 | 1711.87 | 2447.91 | |
| 4th | 82.88 | 673.32 | 90.10 | 3.42 | 1155.07 | 1.52 | 1785.97 | 2020.00 | |
| 5th | 92.32 | 668.77 | 98.83 | 3.20 | 1207.06 | 1.69 | 1855.56 | 2504.81 | |
| Mean value | 87.80 | 670.40 | 94.01 | 3.28 | 1265.25 | 1.80 | 1822.78 | 2345.59 | |
| Variance | 4.98 | 8.35 | 5.99 | 0.17 | 80.90 | 0.21 | 79.97 | 191.75 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Zhang, F.; Sun, Y.; Li, X.; Liu, P.; Liu, L.; Miao, Z. Underwater Target Recognition via Cayley-Klein Measure and Shape Prior Information in Hyperspectral Imaging. Appl. Sci. 2023, 13, 7854. https://doi.org/10.3390/app13137854
Zhang B, Zhang F, Sun Y, Li X, Liu P, Liu L, Miao Z. Underwater Target Recognition via Cayley-Klein Measure and Shape Prior Information in Hyperspectral Imaging. Applied Sciences. 2023; 13(13):7854. https://doi.org/10.3390/app13137854
Chicago/Turabian StyleZhang, Bin, Fan Zhang, Yansen Sun, Xiaojie Li, Pei Liu, Liang Liu, and Zelang Miao. 2023. "Underwater Target Recognition via Cayley-Klein Measure and Shape Prior Information in Hyperspectral Imaging" Applied Sciences 13, no. 13: 7854. https://doi.org/10.3390/app13137854