


Identification of Subsurface Mesoscale Crack in Full Ceramic Ball Bearings Based on Strain Energy Theory

Abstract
:1. Introduction
2. Dynamic Models Containing Subsurface Mesoscale Fault
2.1. Stiffness Weakening Coefficient and Strain Energy Release Rate
2.2. FCBB Outer Ring Contact Load
2.3. Time-Varying Stiffness and Dynamic Model for Subsurface Crack Locations in Full Ceramic Outer Ring
3. Numerical Simulation
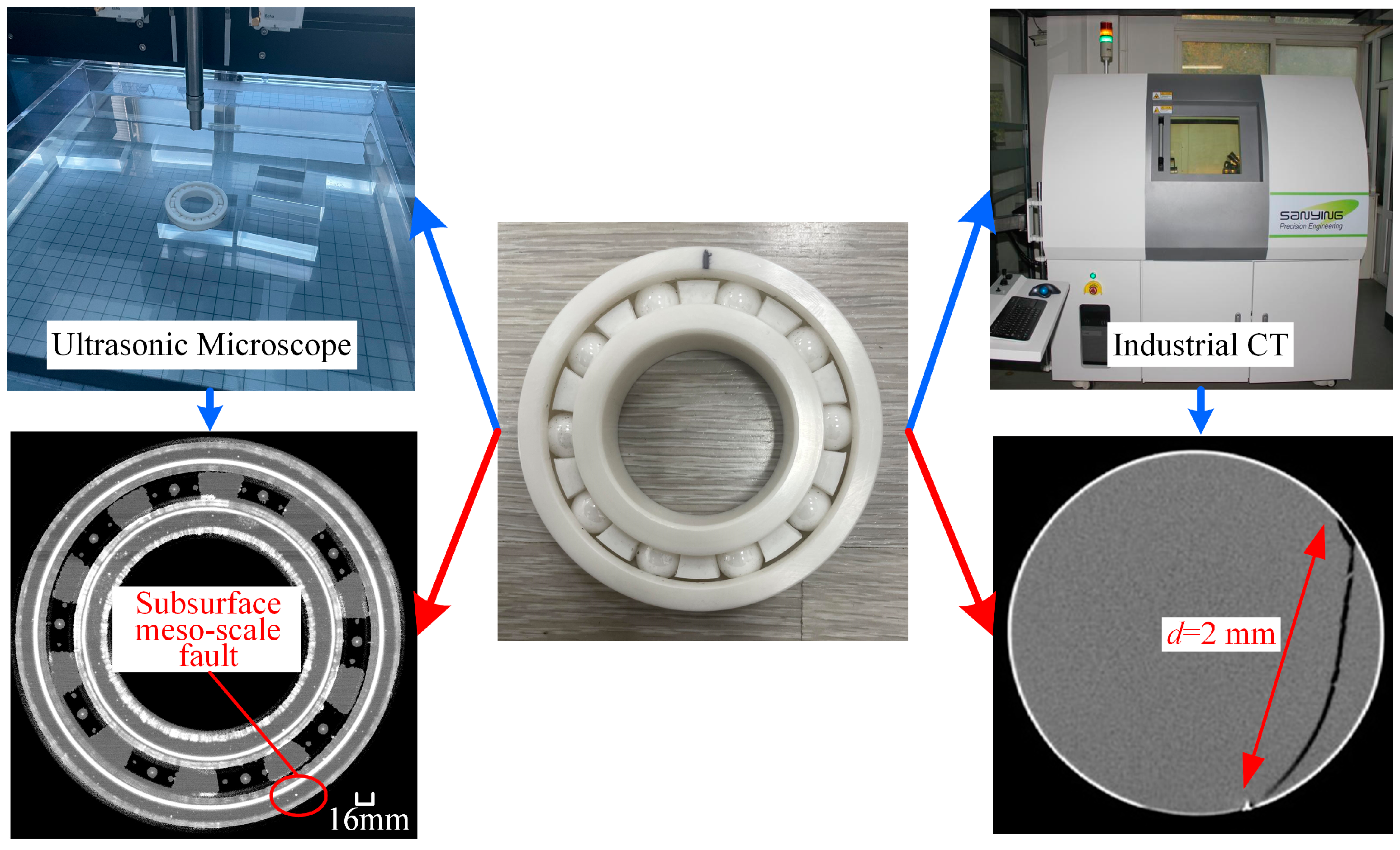
4. Experimental Investigation
5. Discussion
6. Conclusions
- (1)
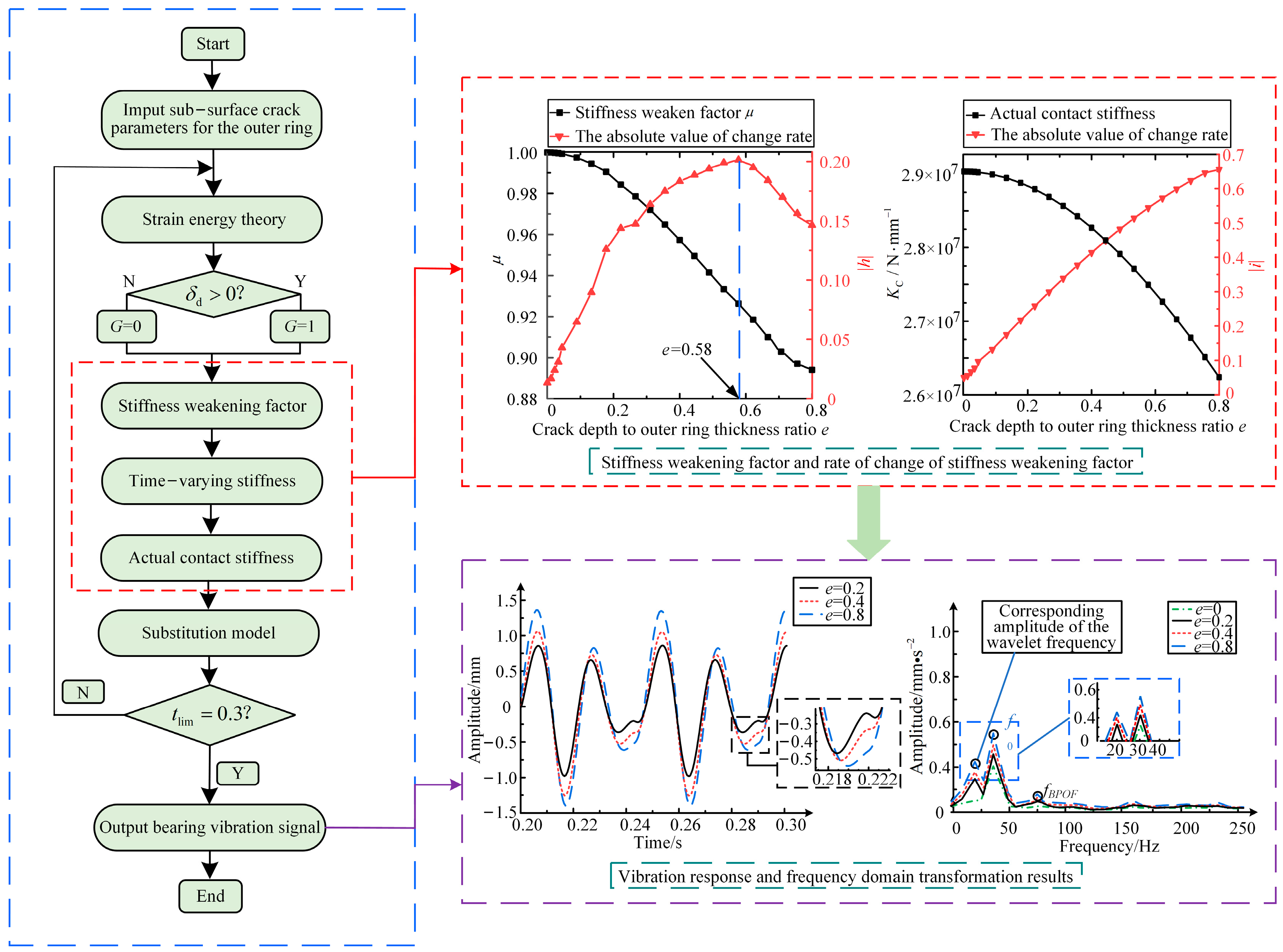
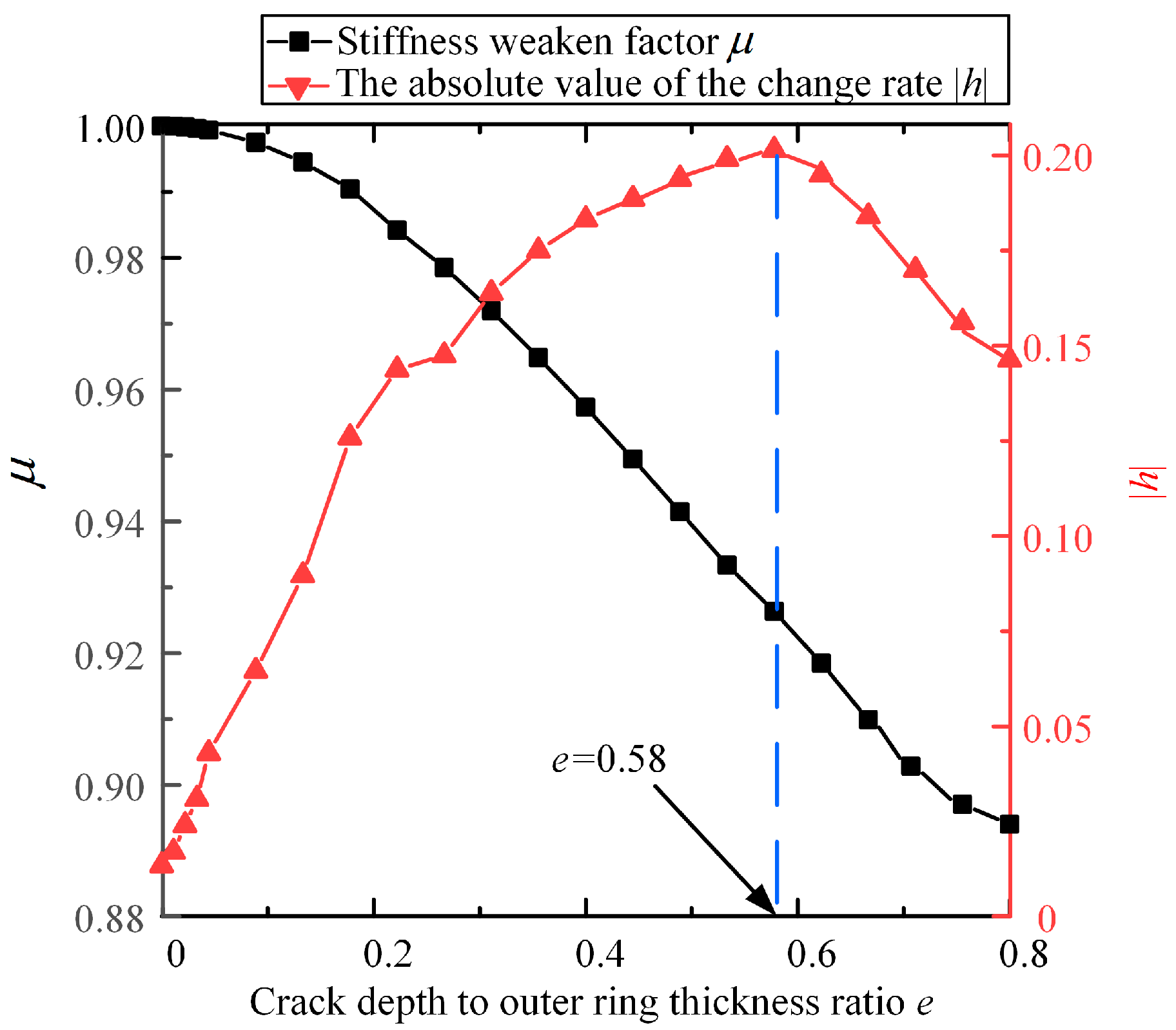
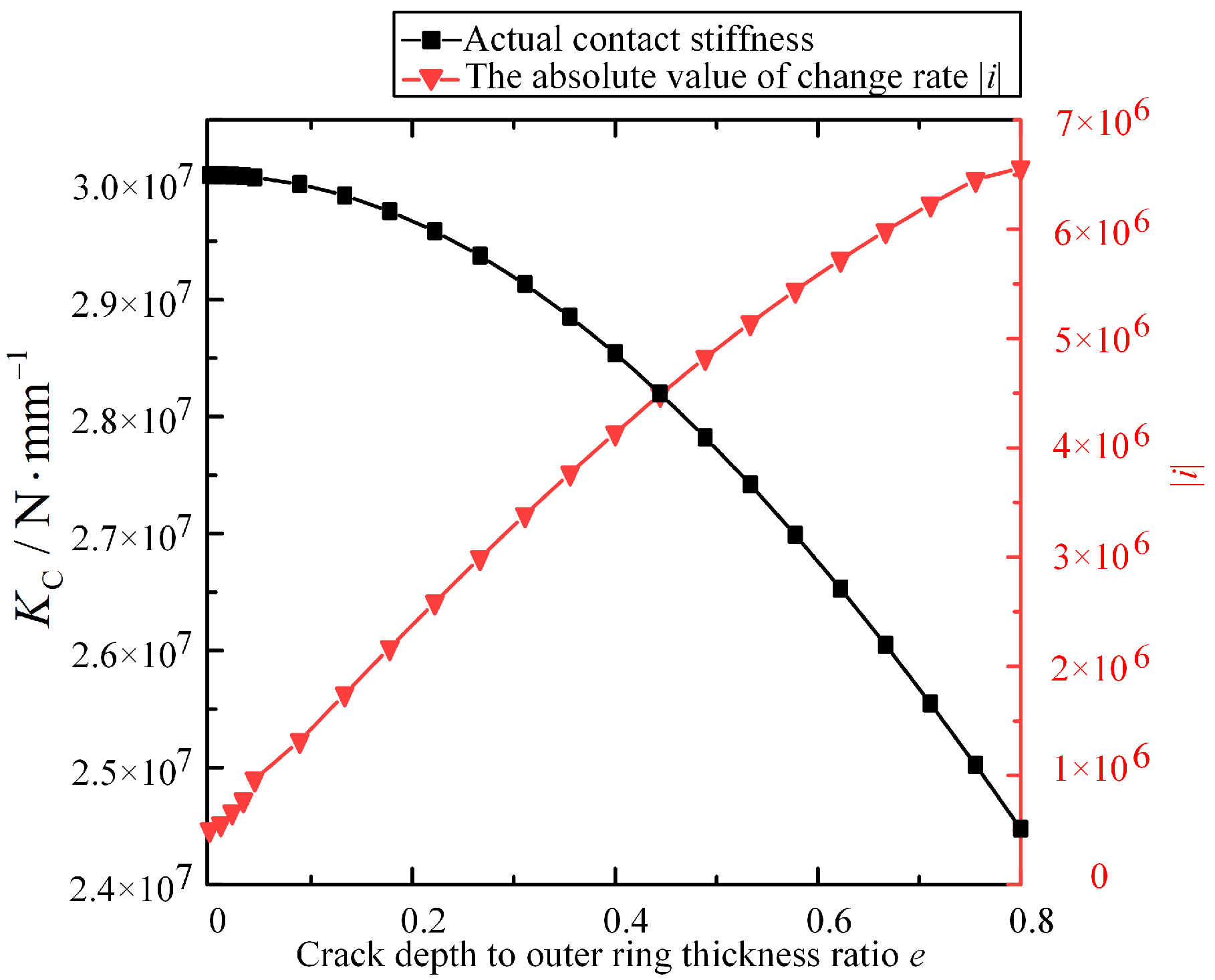
- This paper proposes a dynamic model based on the strain energy theory of ceramic materials for the failure of mesoscale cracks on the outer ring subsurface of FCBB. Based on this model, the weakening coefficient of the outer ring stiffness of bearings is found to decrease slowly at first, then comes down sharply, and finally becomes stable. The actual contact stiffness first decreases monotonously, which signifies that the stiffness weakening brought about by the cracks is fatal.
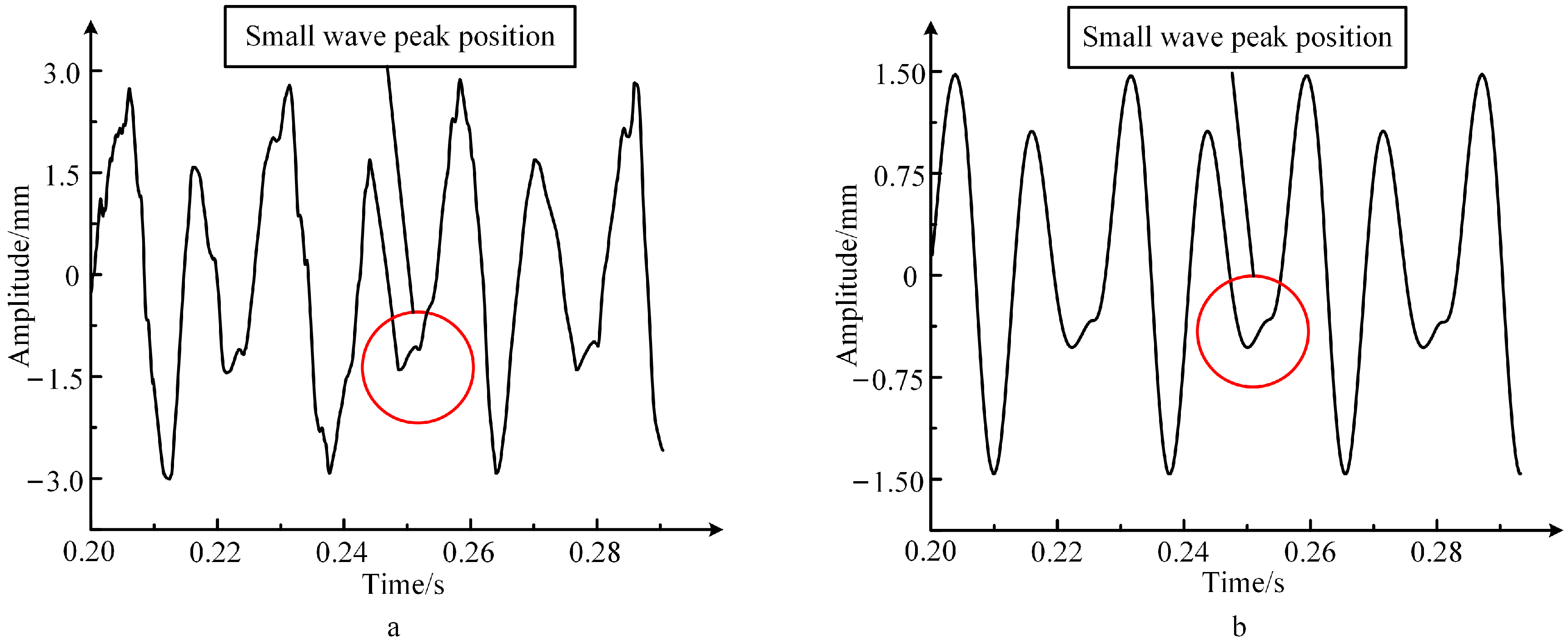
- (2)
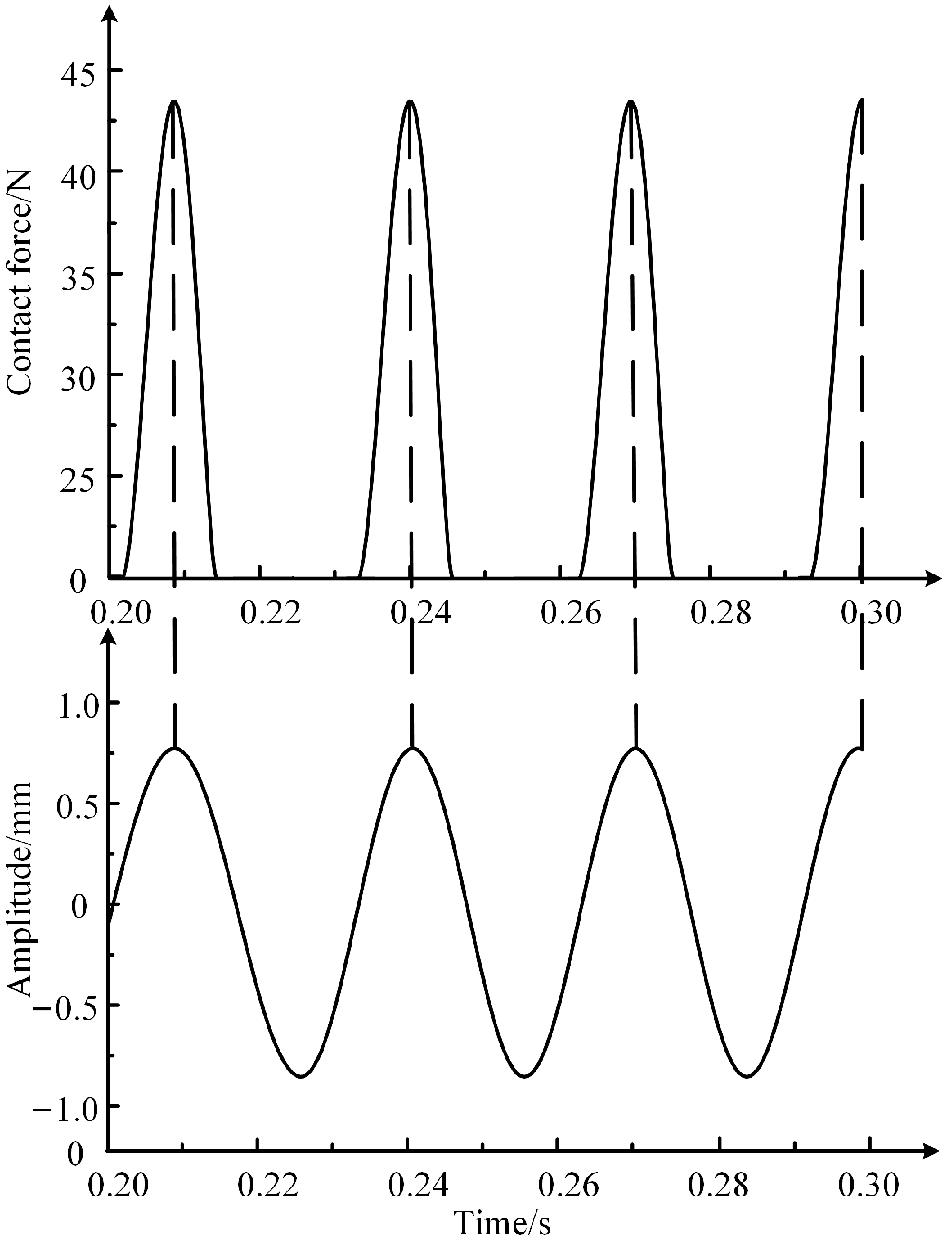
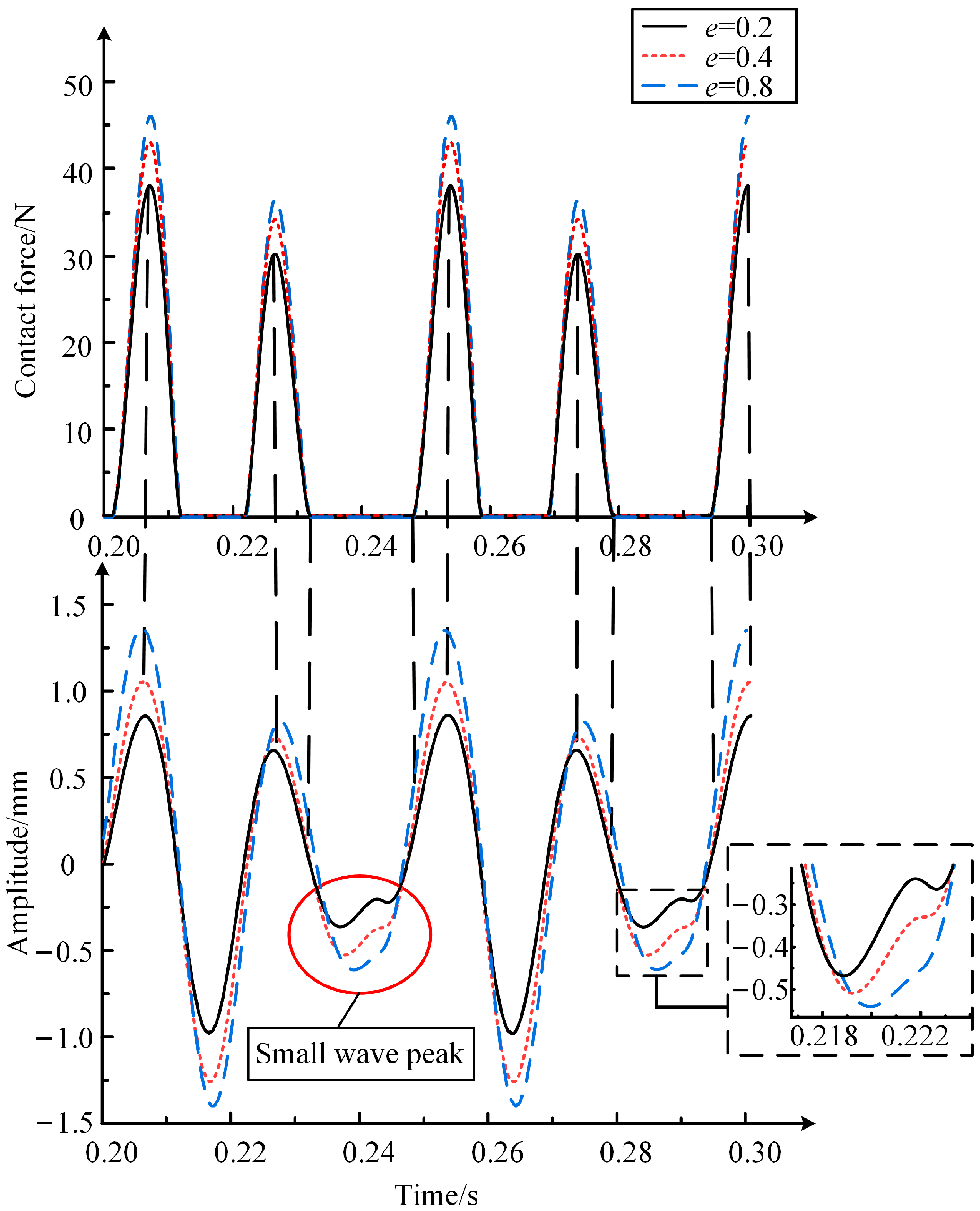
- When there are mesoscale cracks in FCBB, small periodic wave peak is seen in the vibration time-domain signal, and the height of the wave peak increases with the radial length of the mesoscale cracks. The small wave peak is used as a preliminary indication for mesoscale cracks, and the height of small wave peaks reflects the degrees of crack evolution.
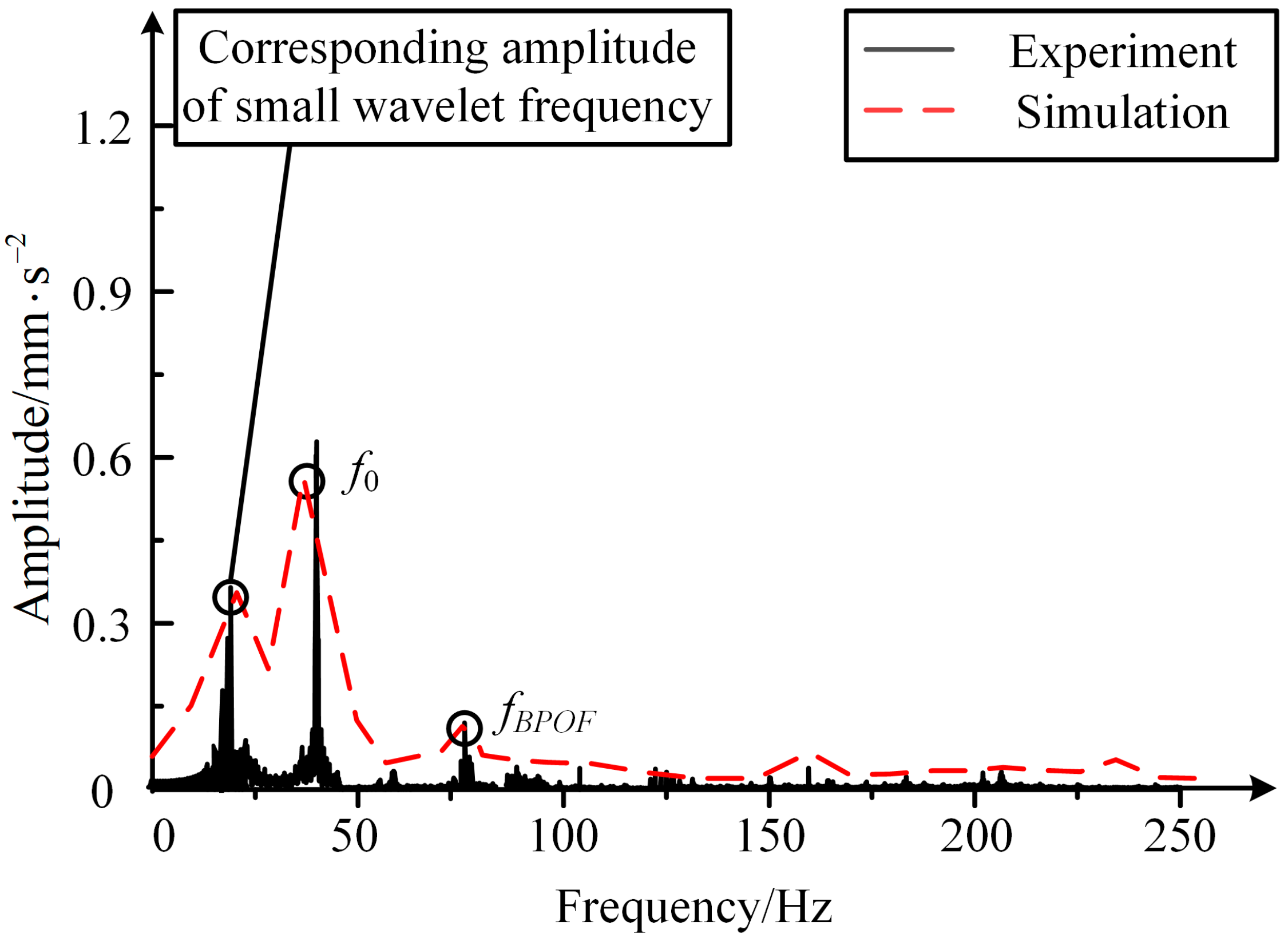
- (3)
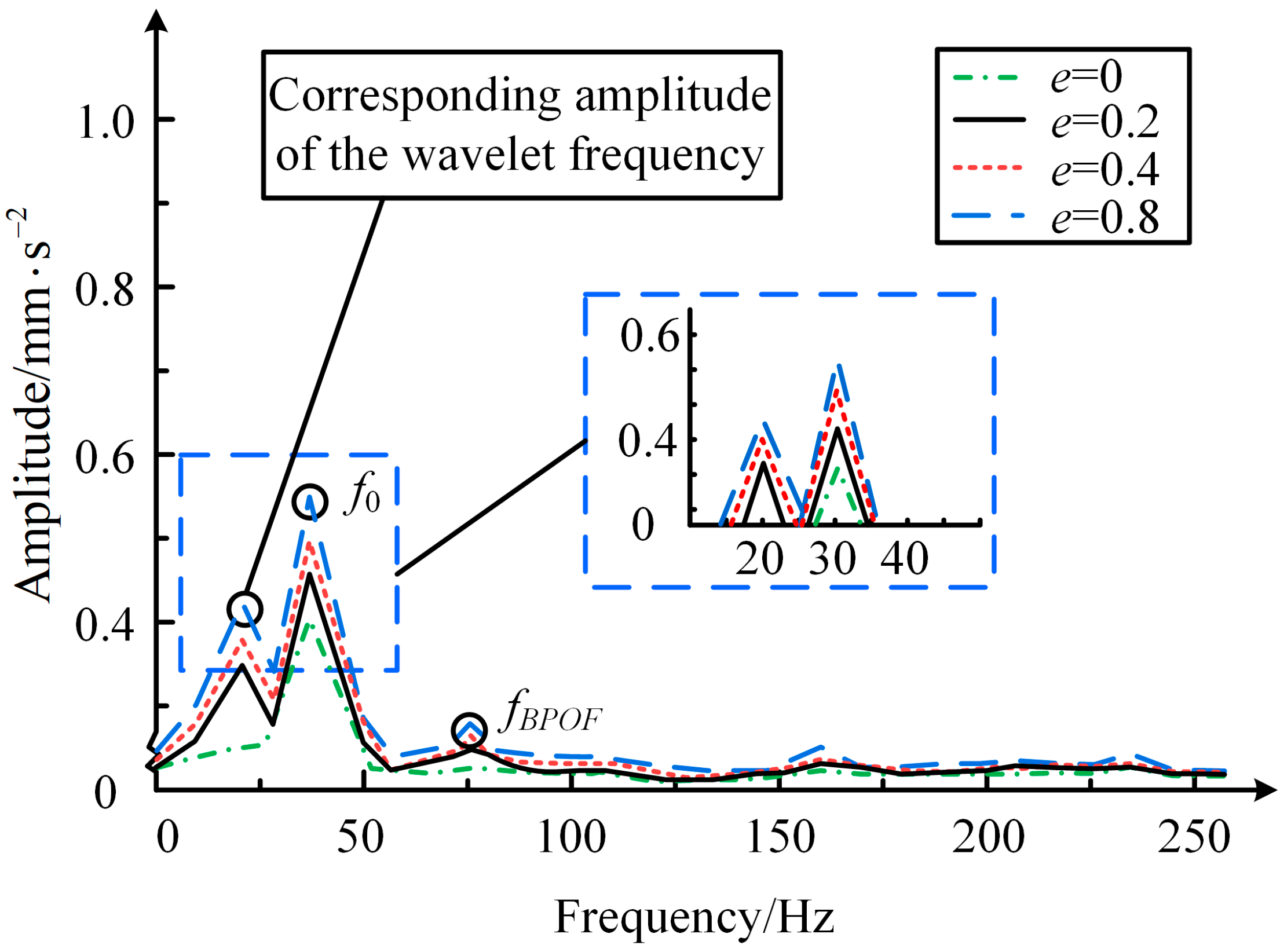
- The subsurface mesoscale cracks also lead to changes in frequency-domain results of the FCBB dynamic response, and a special characteristic frequency appears near the rotating frequency. The height of its amplitude can be used to indicate the degree of crack evolution, and is more decisive for fault detection and evaluation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shi, H.; Hou, M.; Wu, Y.; Li, B. Incipient fault detection of full ceramic ball bearing based on modified observer. Int. J. Control. Autom. Syst. 2022, 20, 727–740. [Google Scholar] [CrossRef]
- Xia, Z.; Wu, Y.; Ma, T.; Bao, Z.; Tian, J.; Gao, L.; Sun, J.; Li, S. Experimental study on adaptability of full ceramic ball bearings under extreme conditions of cryogenics and heavy loads. Tribol. Int. 2022, 175, 107849. [Google Scholar] [CrossRef]
- Sun, J.; Wu, Y.; Yang, J.; Yao, J.; Xia, Z.; Ma, T.; Luo, J. Friction properties and distribution rule of lubricant film of full ceramic ball bearing under different service condition. J. Ceram.-Silikáty 2022, 66, 54–65. [Google Scholar] [CrossRef]
- Jiang, Y.; Huang, W.; Luo, J.; Wang, W. An improved dynamic model of defective bearings considering the three-dimensional geometric relationship between the rolling element and defect area. Mech. Syst. Signal Process. 2019, 129, 694–716. [Google Scholar] [CrossRef]
- Shen, F.; Zhou, K. An elasto-plastic-damage model for initiation and propagation of spalling in rolling bearings. Int. J. Mech. Sci. 2019, 161, 105058. [Google Scholar] [CrossRef]
- Bai, X.; Shi, H.; Zhang, K.; Zhang, X.; Wu, Y. Effect of the fit clearance between ceramic outer ring and steel pedestal on the sound radiation of full ceramic ball bearing system. J. Sound Vib. 2022, 529, 116967. [Google Scholar] [CrossRef]
- Dong, Q.; Wei, H.; Ma, G. Failure mechanism of S-shaped fissure in brittle materials under uniaxial tension: Experimental and numerical analyses. Int. J. Solids Struct. 2020, 191, 486–496. [Google Scholar] [CrossRef]
- Wang, P.; Yang, Y.; Ma, H.; Xu, H.; Li, X.; Luo, Z.; Wen, B. Vibration characteristics of rotor-bearing system with angular misalignment and cage fracture: Simulation and experiment. Mech. Syst. Signal Process. 2023, 182, 109545. [Google Scholar] [CrossRef]
- Liu, J.; Shao, Y. Overview of dynamic modelling and analysis of rolling element bearings with localized and distributed faults. Nonlinear Dyn. 2018, 93, 1765–1798. [Google Scholar] [CrossRef]
- Petersen, D.; Howard, C.; Sawalhi, N.; Moazen, A.A.; Singh, S. Analysis of bearing stiffness variations, contact forces and vibrations in radially loaded double row rolling element bearings with raceway defects. Mech. Syst. Signal Process. 2015, 50–51, 139–160. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, G.; Zhu, L.; Wang, H.; Han, C.; Li, Z.; Wang, H.; Yong, Q.; Huang, Y. Structure–performance evolution mechanism of the wear failure process of coated spherical plain bearings. Eng. Fail. Anal. 2022, 135, 106097. [Google Scholar] [CrossRef]
- Deng, S.; Qin, X.; Huang, S. A study on the effect of subsurface crack propagation on rolling contact fatigue in a bearing ring. J. Mech. Sci. Technol. 2015, 29, 1029–1038. [Google Scholar] [CrossRef]
- Liu, J.; Li, X.; Shi, Z. An investigation of contact characteristics of a roller bearing with a subsurface crack. Eng. Fail. Anal. 2020, 116, 104744. [Google Scholar] [CrossRef]
- Danielsen, H.K.; Guzmán, F.G.; Fæster, S.; Shirani, M.; Rasmussen, B.H.; Linzmayer, M.; Jacobs, G. Accelerated White Etch Cracking (WEC) FE8 type tests of different bearing steels using ceramic rollers. Wear 2022, 494–495, 204230. [Google Scholar] [CrossRef]
- Li, T.; Shi, H.; Bai, X.; Zhang, K. A fault diagnosis method based on stiffness evaluation model for full ceramic ball bearings containing subsurface cracks. Eng. Fail. Anal. 2023, 148, 107213. [Google Scholar] [CrossRef]
- Anglada, M. Assessment of mechanical properties of ceramic materials. In Advances in Ceramic Biomaterials; Woodhead Publ.: Cambridge, UK, 2017; pp. 83–109. [Google Scholar]
- Shao, Y.; Liu, B.; Wang, X.; Li, L.; Wei, J.; Song, F. Crack propagation speed in ceramic during quenching. J. Eur. Ceram. Soc. 2018, 38, 2879–2885. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Yu, K.; Ma, H.; Cao, L.; Luo, Z.; Li, H.; Che, L. Analysis of varying contact angles and load distributions in defective angular contact ball bearing. Eng. Fail. Anal. 2018, 91, 449–464. [Google Scholar] [CrossRef]
- Wu, Y.; Yan, H.; Li, S.; Zhang, K.; Zhang, L. Calculation on the radiation noise of ceramic ball bearings based on dynamic model considering nonlinear contact stiffness and damping. J. Sound Vib. 2020, 479, 115374. [Google Scholar] [CrossRef]
- Raga, R.; Khader, I.; Chlup, Z. Damage initiation and evolution in silicon nitride under non-conforming lubricated hybrid rolling contact. Wear 2016, 360–361, 147–159. [Google Scholar] [CrossRef]
- Kanematsu, W. A review of rolling contact fatigue behavior of silicon nitride focusing on testing practices and crack propagation analysis. Wear 2018, 400–401, 10–20. [Google Scholar] [CrossRef]
- Nazir, M.H.; Khan, Z.A.; Saeed, A. Experimental analysis and modelling of c-crack propagation in silicon nitride ball bearing element under rolling contact fatigue. Tribol. Int. 2018, 126, 386–401. [Google Scholar] [CrossRef]
- Härtelt, M.; Fünfschilling, S.; Schwind, T. Deducing the fatigue crack growth rates of natural flaws in silicon nitride ceramics: Role of R-Curves. J. Am. Ceram. Soc. 2013, 96, 2593–2597. [Google Scholar] [CrossRef]
- Ma, H.; Zeng, J.; Feng, R.; Pang, X.; Wang, Q.; Wen, B. Review on dynamics of cracked gear systems. Eng. Fail. Anal. 2015, 55, 224–245. [Google Scholar] [CrossRef]
- Saeedifar, M.; Ahmadi Najafabadi, M.; Mohammadi, K.; Fotouhi, M.; Hosseini Toudeshky, H.; Mohammadi, R. Acoustic emission-based methodology to evaluate delamination crack growth under quasi-static and fatigue loading conditions. J. Nondestruct. Eval. 2018, 37, 1. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Ma, D.; Shi, X.; Sun, L.; Gao, T. Determining the fracture toughness of silicon nitride by Vickers indenter. China Meas. Test 2017, 43, 129–135. [Google Scholar]
- Shi, H.; Liu, Z.; Bai, X.; Li, Y.; Wu, Y. A Theoretical Model with the Effect of Cracks in the Local Spalling of Full Ceramic Ball Bearings. Appl. Sci. 2019, 9, 4142. [Google Scholar] [CrossRef] [Green Version]
- Strobl, S.; Supancic, P.; Lube, T.; Danzer, R. Surface Crack in Tension or in Bending—A Reassessment of the Newman and Raju Formula in Respect to Fracture Toughness Measurements in Brittle Materials. J. Eur. Ceram. Soc. 2012, 32, 1491–1501, Erratum in J. Eur. Ceram. Soc. 2018, 355–358. [Google Scholar] [CrossRef]
- Zhao, L. Vibration Studies of Ball Bearings; Zhejiang University: Hangzhou, China, 2004. [Google Scholar]
- Feng, Q.; Song, L.; Quan, J.; Lei, X. Theoretical verification of the rationality of strain energy storage index as rock burst criterion based on linear energy storage law. J. Rock Mech. Geotech. Eng. 2022, 14, 1737–1746. [Google Scholar]
- Sunnersjö, C.S. Varying compliance vibrations of rolling bearings. J. Sound Vib. 1978, 58, 363–373. [Google Scholar] [CrossRef]
- Zhao, M.; Lin, J.; Xu, X.; Lei, Y. Tacholess envelope order analysis and its application to fault detection of rolling element bearings with varying speeds. Sensors 2013, 13, 10856–10875. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Bai, X.; Shi, H.; Wu, Y.H.; Ma, H. A recognition method for crack position on the outer ring of full ceramic bearing based on the synchronous root mean square difference. J. Sound Vib. 2021, 515, 116493. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| Outer diameter of bearing outer ring (mm) | 52 |
| Inner diameter of bearing outer ring (mm) | 46 |
| Inner diameter of bearing inner race (mm) | 20 |
| Outer diameter of bearing inner ring (mm) | 26 |
| Bearing radial clearance (μm) | 2 |
| Bearing width (mm) | 15 |
| Contact angle (°) | 0 |
| Number of rolling elements | 7 |
| Name | Numerical Value |
|---|---|
| Spindle speed (r/min) | 1800 |
| Radial load Fr (N) | 50 |
| Sampling frequency (Hz) | 3000 |
| Outer diameter of bearing outer ring (mm) | 50.8 |
| Inner diameter of bearing inner ring (mm) | 25.4 |
| Bearing width (mm) | 7.144 |
| Number of rolling elements | 9 |
| Contact angle (°) | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, X.; Zhang, Z.; Shi, H.; Luo, Z.; Li, T. Identification of Subsurface Mesoscale Crack in Full Ceramic Ball Bearings Based on Strain Energy Theory. Appl. Sci. 2023, 13, 7783. https://doi.org/10.3390/app13137783
Bai X, Zhang Z, Shi H, Luo Z, Li T. Identification of Subsurface Mesoscale Crack in Full Ceramic Ball Bearings Based on Strain Energy Theory. Applied Sciences. 2023; 13(13):7783. https://doi.org/10.3390/app13137783
Chicago/Turabian StyleBai, Xiaotian, Zhaonan Zhang, Huaitao Shi, Zhong Luo, and Tao Li. 2023. "Identification of Subsurface Mesoscale Crack in Full Ceramic Ball Bearings Based on Strain Energy Theory" Applied Sciences 13, no. 13: 7783. https://doi.org/10.3390/app13137783