
Research on Remaining Useful Life Prediction of Bearings Based on MBCNN-BiLSTM


Abstract
:1. Introduction
- The proposed bearing RUL prediction method is an end-to-end prediction method that does not rely on manual experience and sets the degradation threshold. The original data are input into the designed model, and the results of the bearing’s RUL are obtained directly.
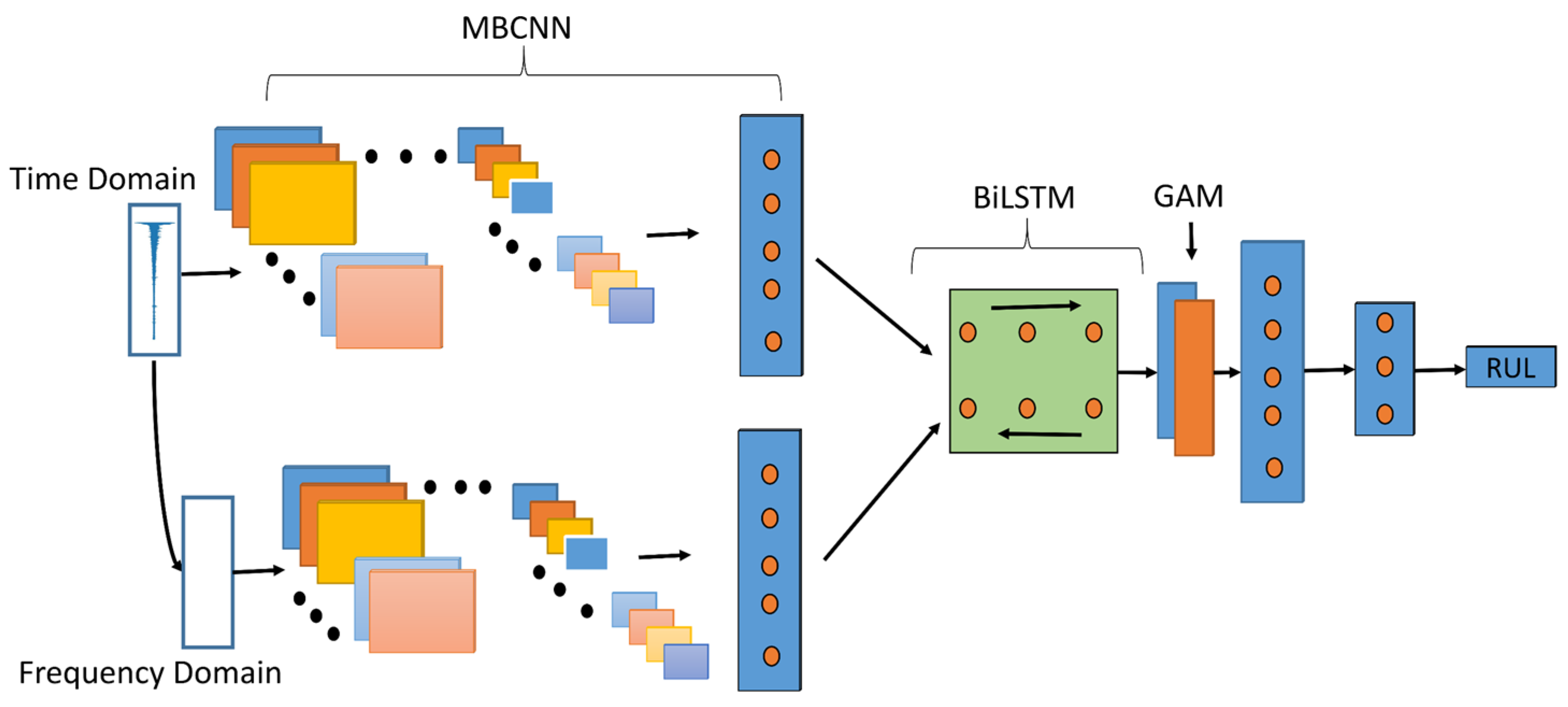
- A multi-branch convolutional neural network and a BiLSTM network are built for the extraction of bearing degradation features without traditional feature extraction.
- The advantages of the proposed method over other methods are verified on a publicly available bearing degradation dataset.
2. Theoretical Background
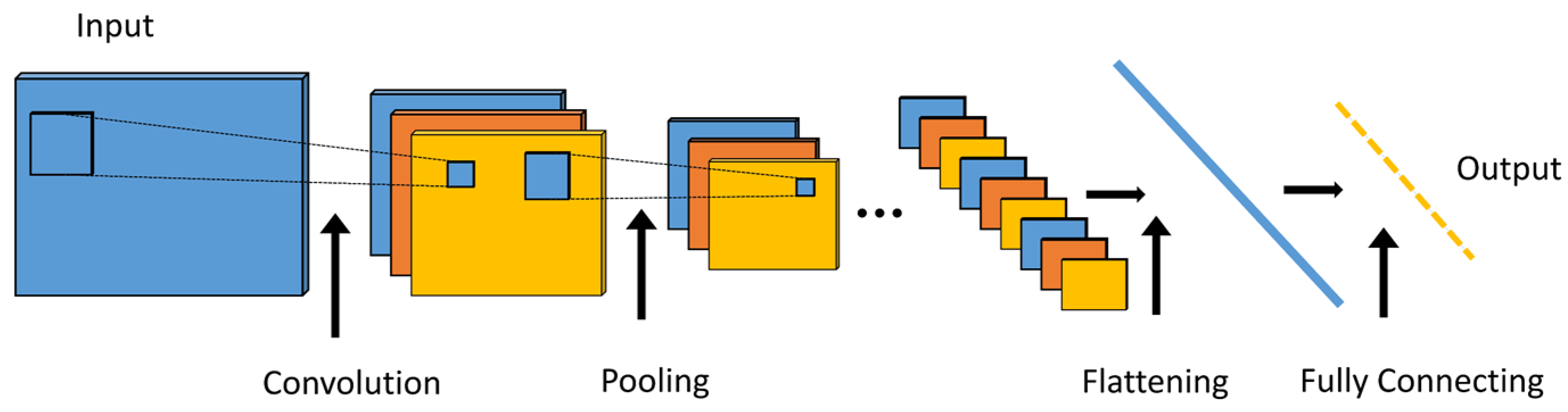
2.1. CNN Network
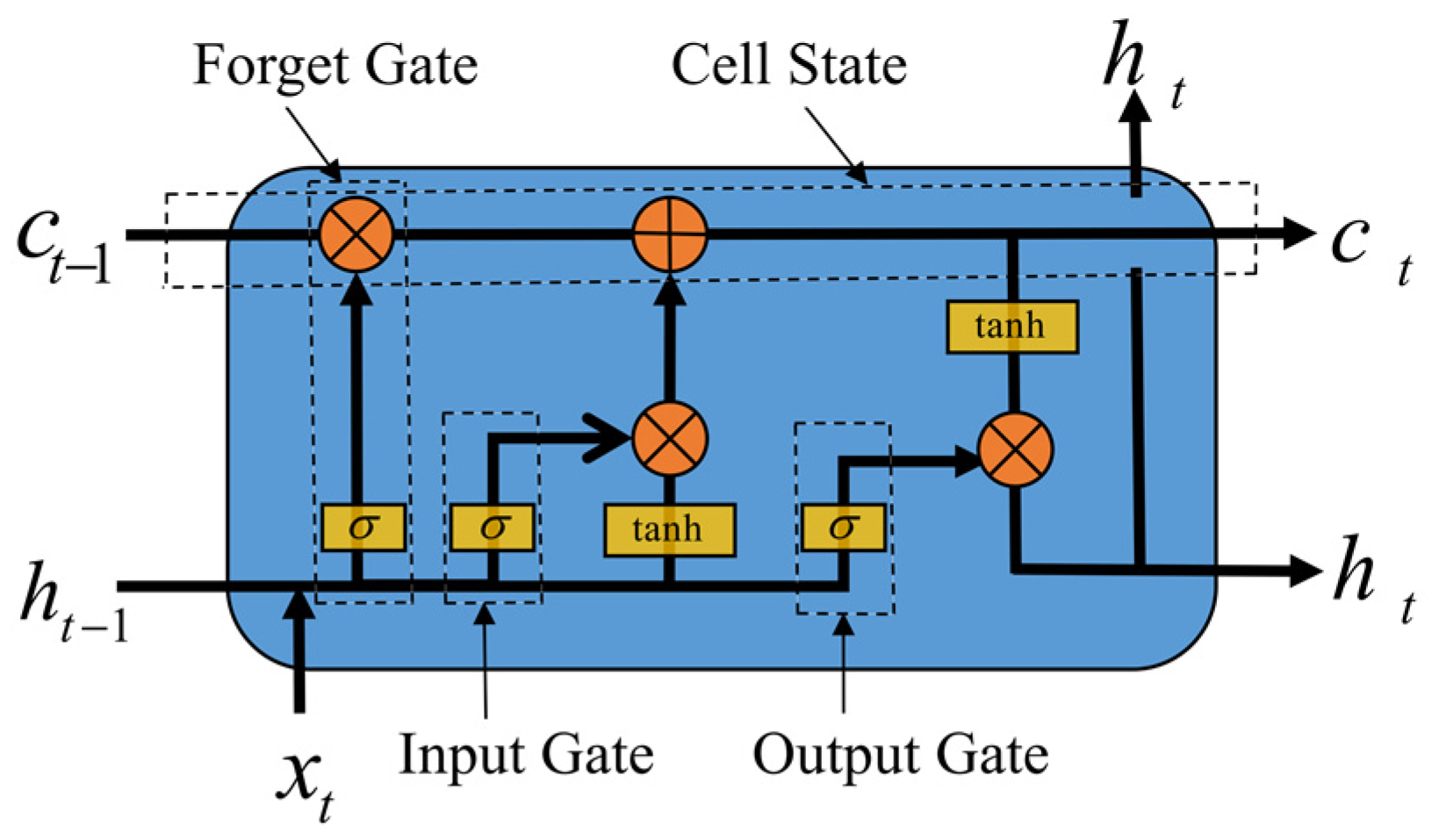
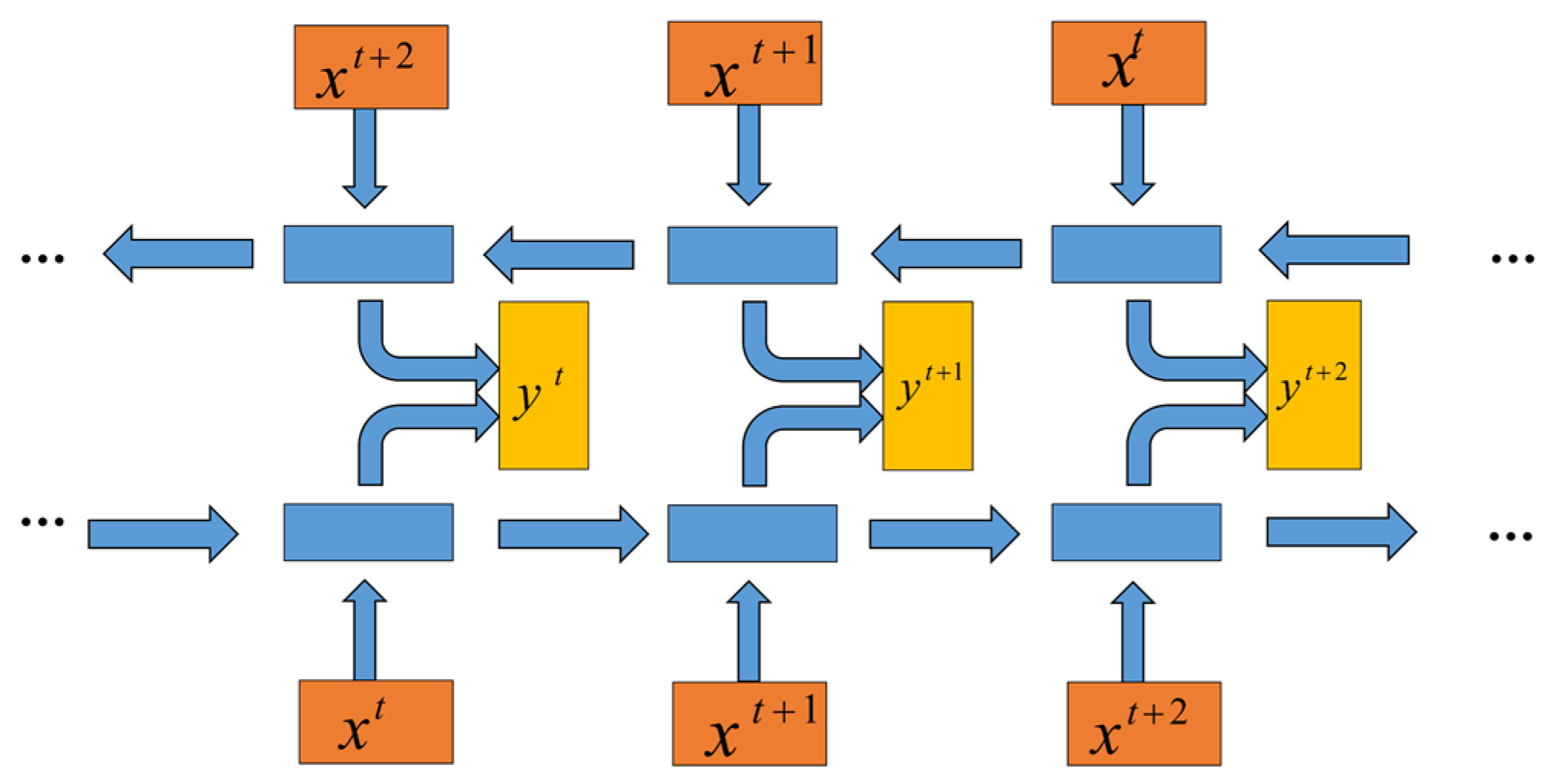
2.2. LSTM Network
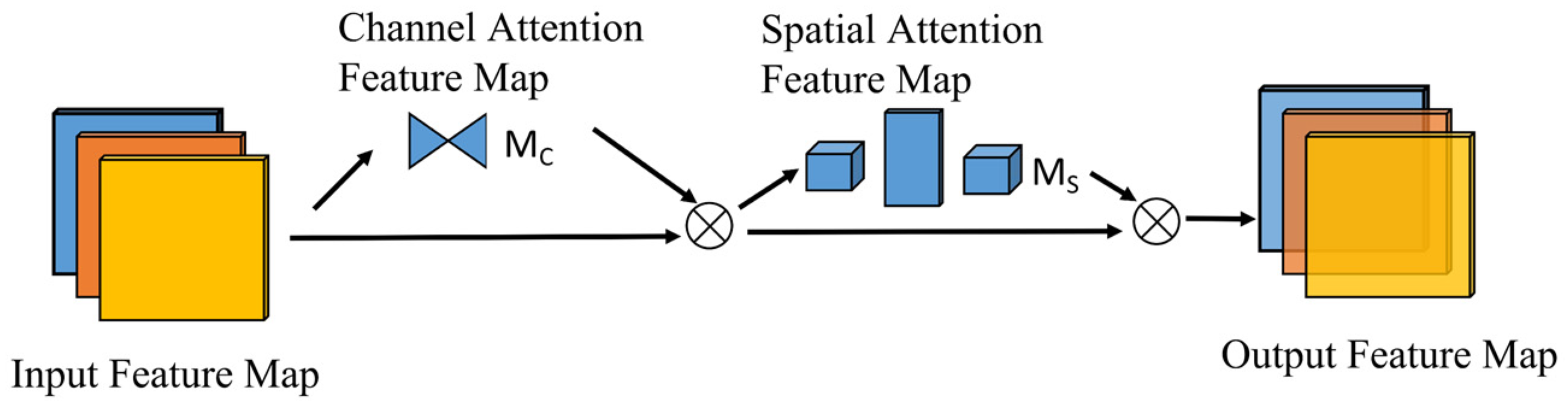
2.3. Attention Mechanism
3. Proposed Method
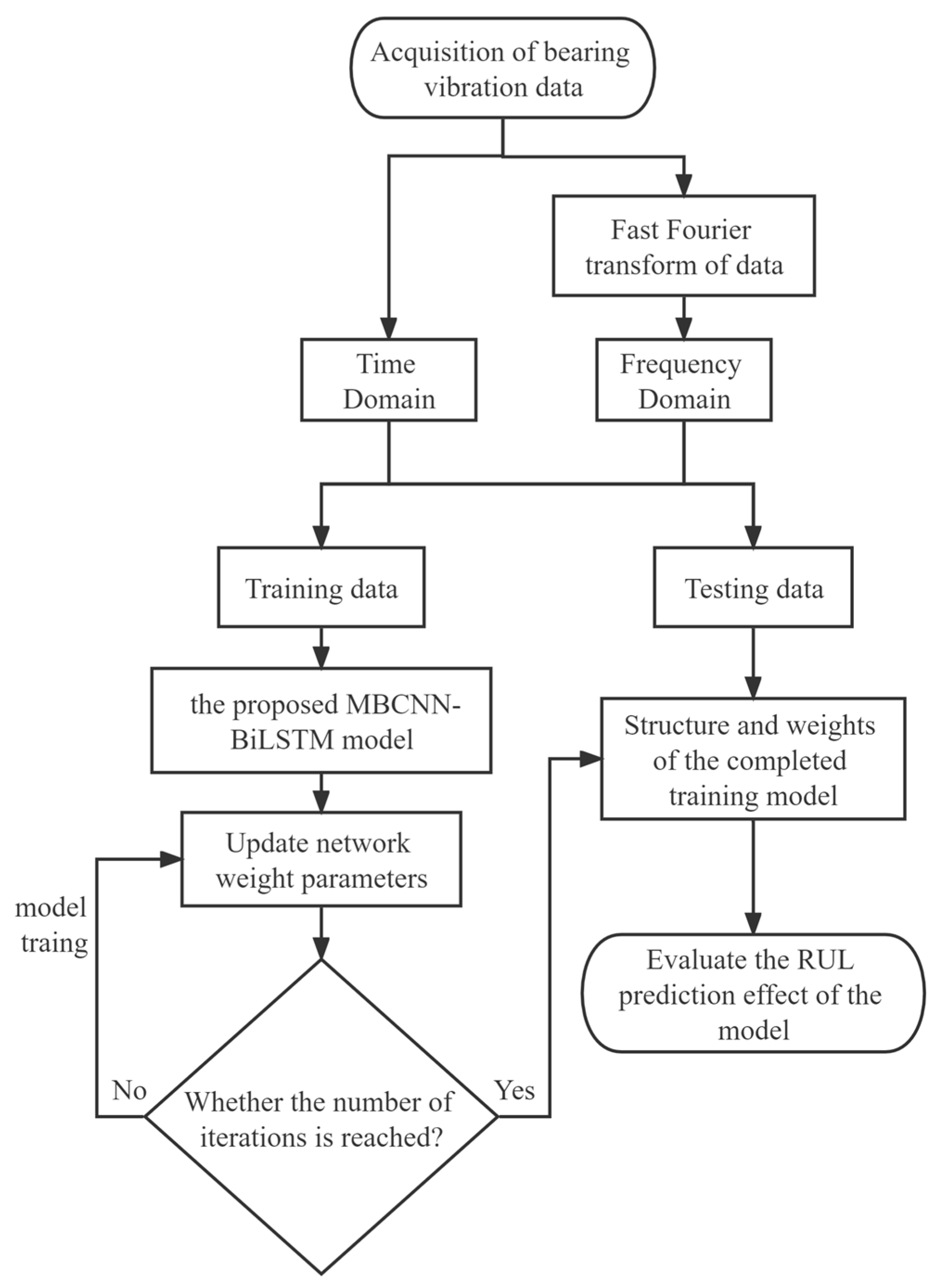
- Step 1. The fast Fourier transform is performed on the bearings’ originally vibrating signal to acquire the frequency domain signal, dividing the dataset into training set and test set based on the original signal and frequency domain signal. With the aim of improving the speed of training convergence of the network, the original vibration signal and the frequency domain signal are normalized. The data are preprocessed with the Z-Score normalization method. After normalization, the data exhibit a distribution with a mean of 1 and a standard deviation of 0. The equation is shown as follows:where denotes the data sample; denotes the mean of the data sample; denotes the standard deviation of the data sample; denotes the normalized data sample.
- Step 2. According to the RUL “end-to-end” prediction method, the bearing RUL labels are normalized and mapped to the range of 0–1, as follows:where denotes the total number of sampling points of the vibration signal for the whole life cycle of the bearing, that is, the actual RUL length of the bearing; is the -th sampling point; is the bearing life label of the -th sampling point. In this paper, the full-life degradation data of the bearing are mapped between 0 and 1. When the life label = 1 at the -th time point, the bearing is a brand-new bearing. When = 0, the bearing has been completely damaged.
- Step 3. The data are divided according to the length of the set time window, and the data in each time window have a time order.
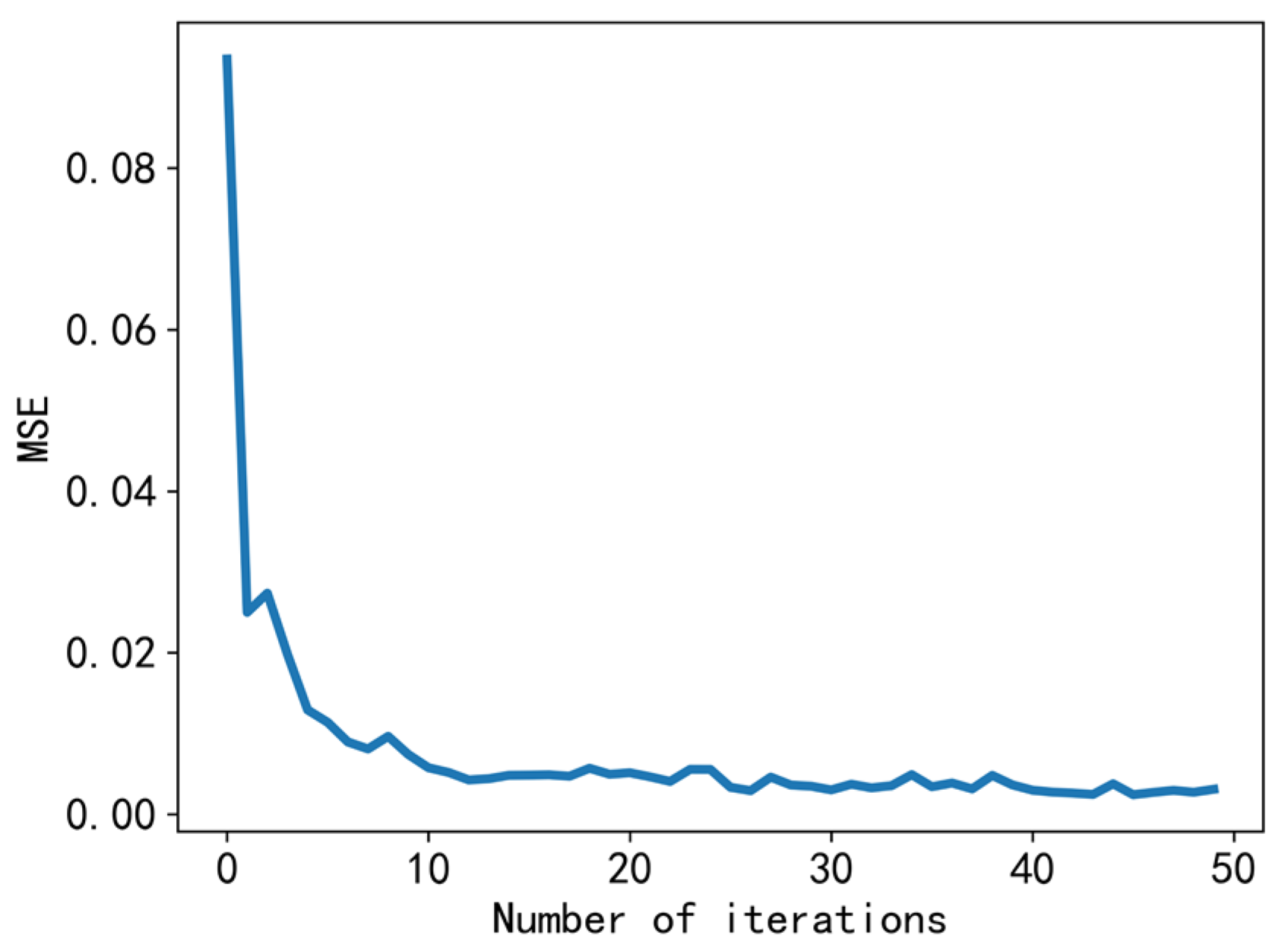
- Step 4. Model training. According to the MBCNN-BiLSTM model structure, the training hyperparameters are configured. The optimization algorithm of back propagation is used in the training period to optimize the network weights according to the loss function taking the minimum value, i.e., the minimum error of RUL between the true and the predicted.
- Step 5. Model evaluation. The data from the test set are input to the trained model to acquire the prediction results. The RUL prediction evaluation metrics are calculated according to the predicted and true values to get the RUL prediction performance of the model.
4. Experimental Study
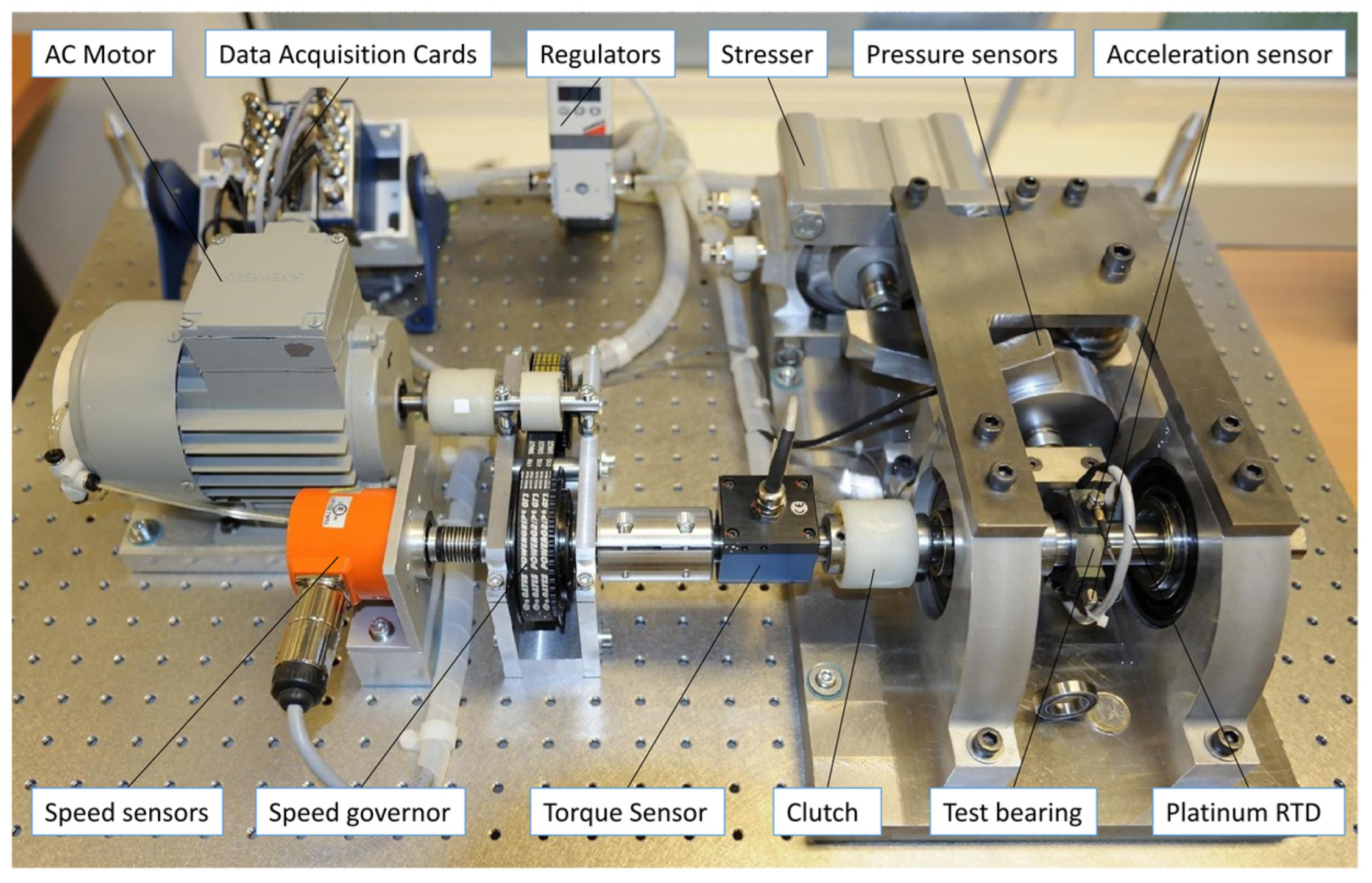
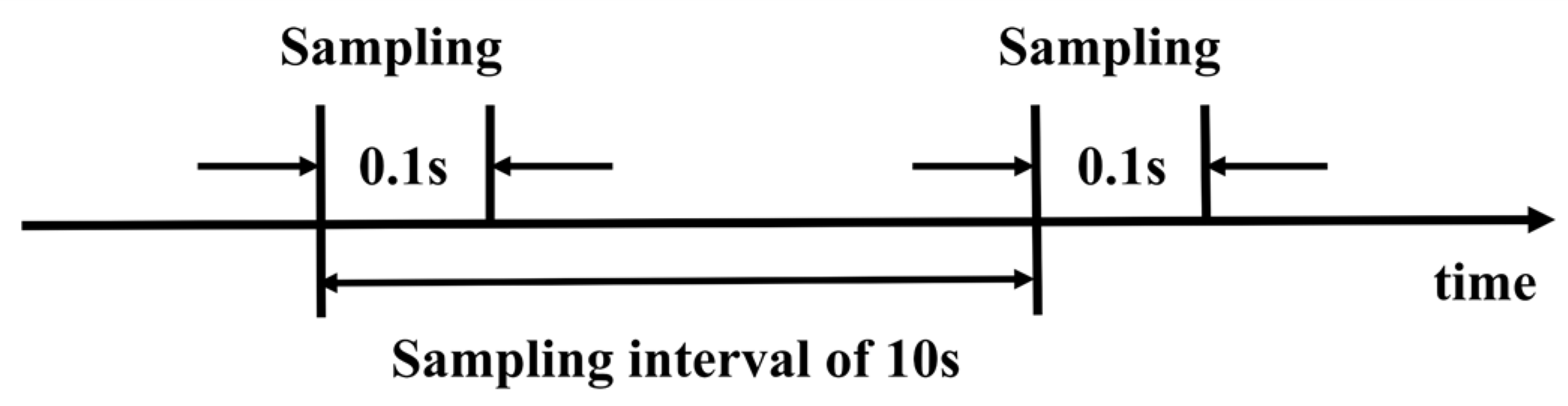
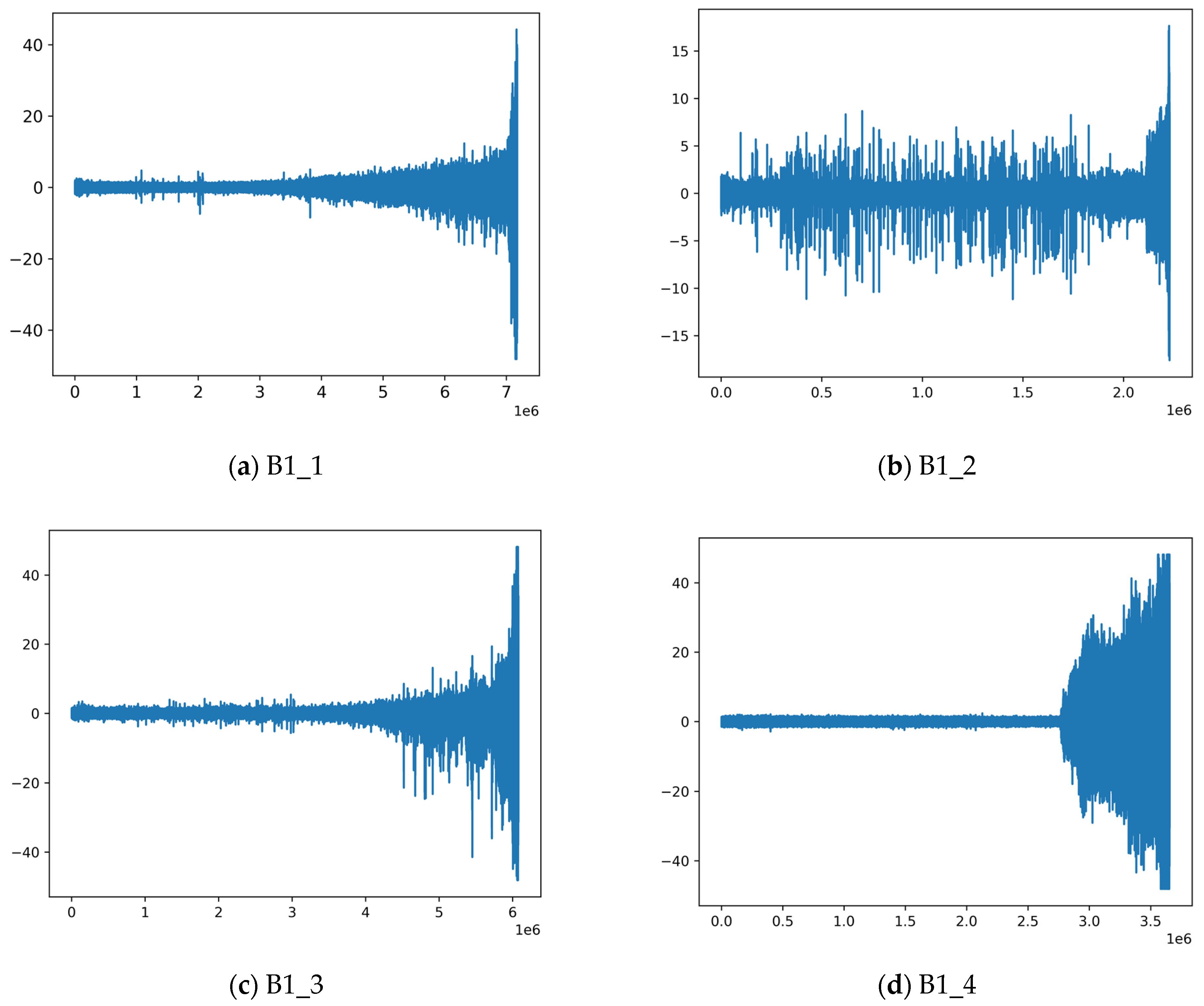
4.1. Experimental Data Presentation
4.2. Experimental Parameter Setting
- The CPU is i9-10900H@3.7 GHz with 32 GB of memory;
- The GPU is NVIDIA Quadro P2200 with 5 GB of video memory;
- The operating system is Windows 10;
- The programming language is Python 3.10, which is implemented on the basis of the pytorch2.0 deep learning framework, and the experiments use the GPU to accelerate the speed of training.
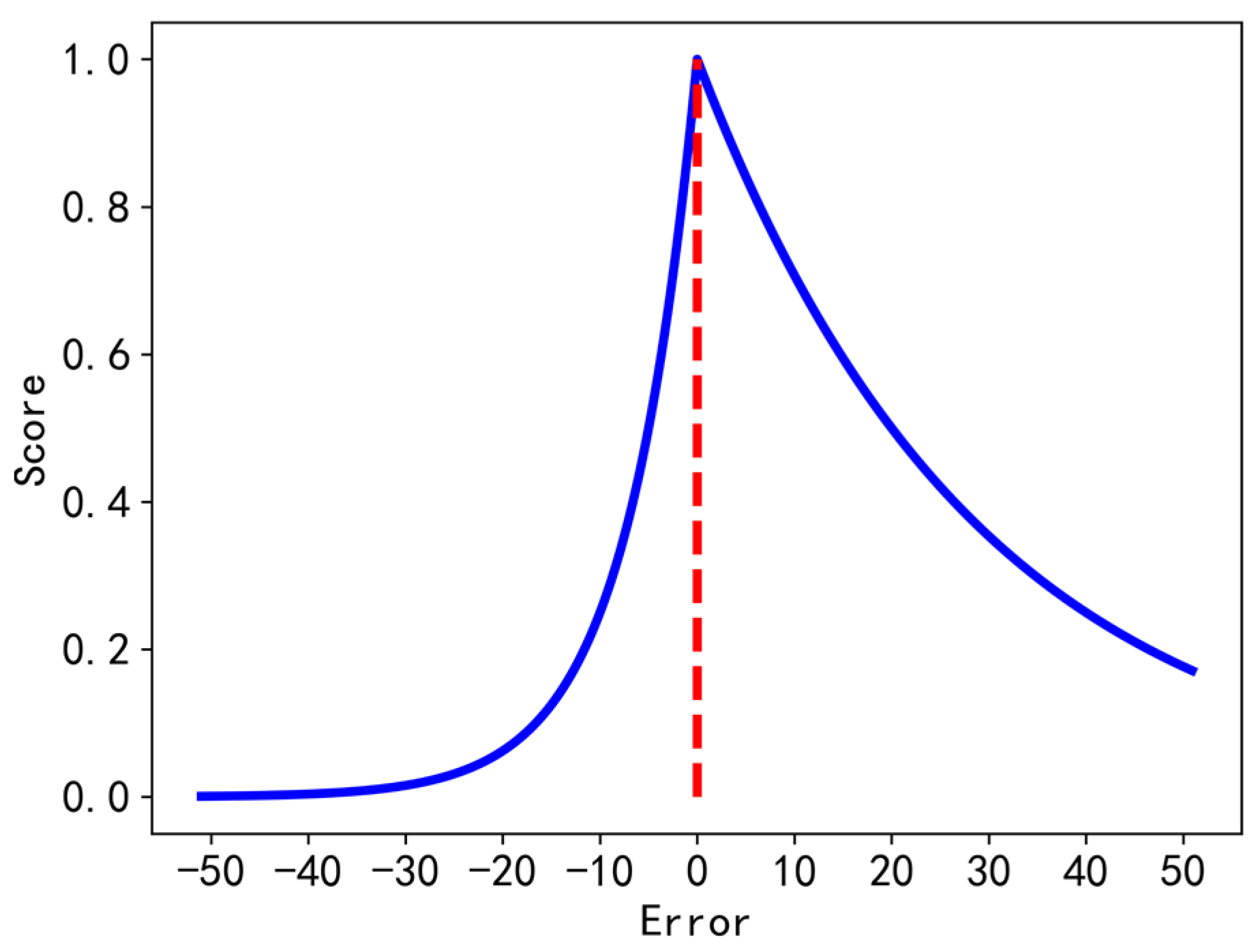
4.3. Performance Evaluation Metrics
4.4. Experimental Comparison Analysis
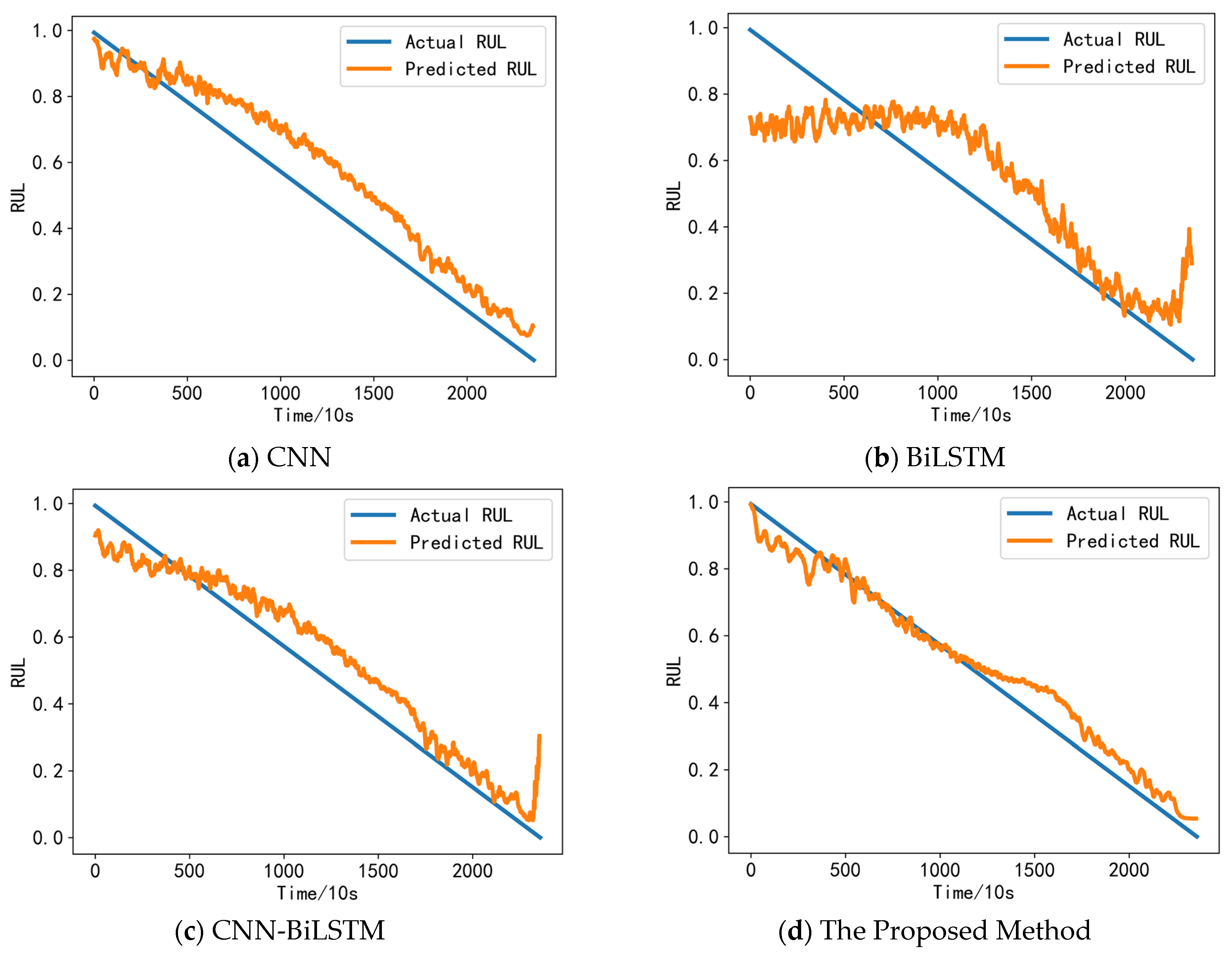
4.4.1. Experiments and Analysis of Different Models
4.4.2. Experiments and Analysis with Different Existing Methods
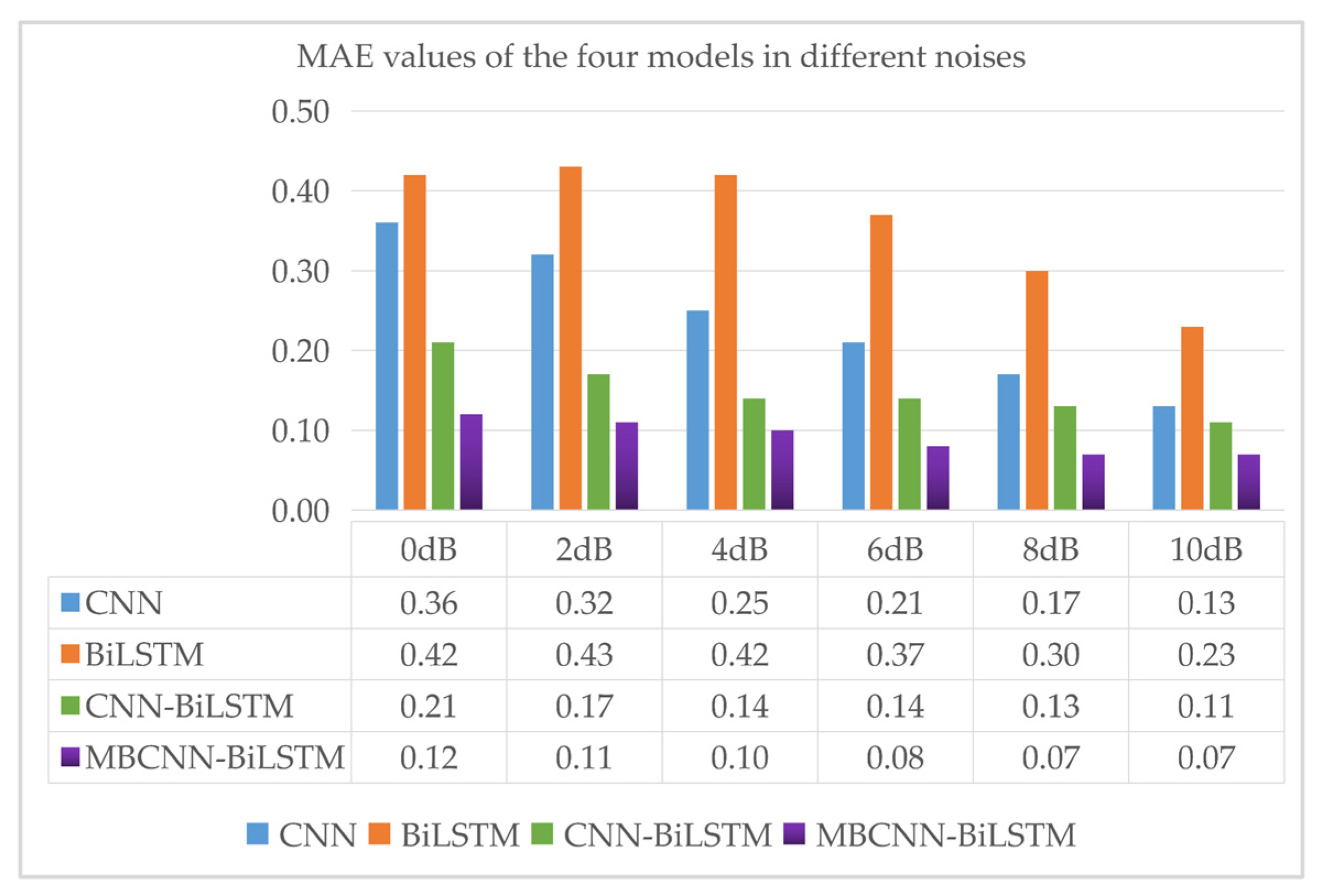
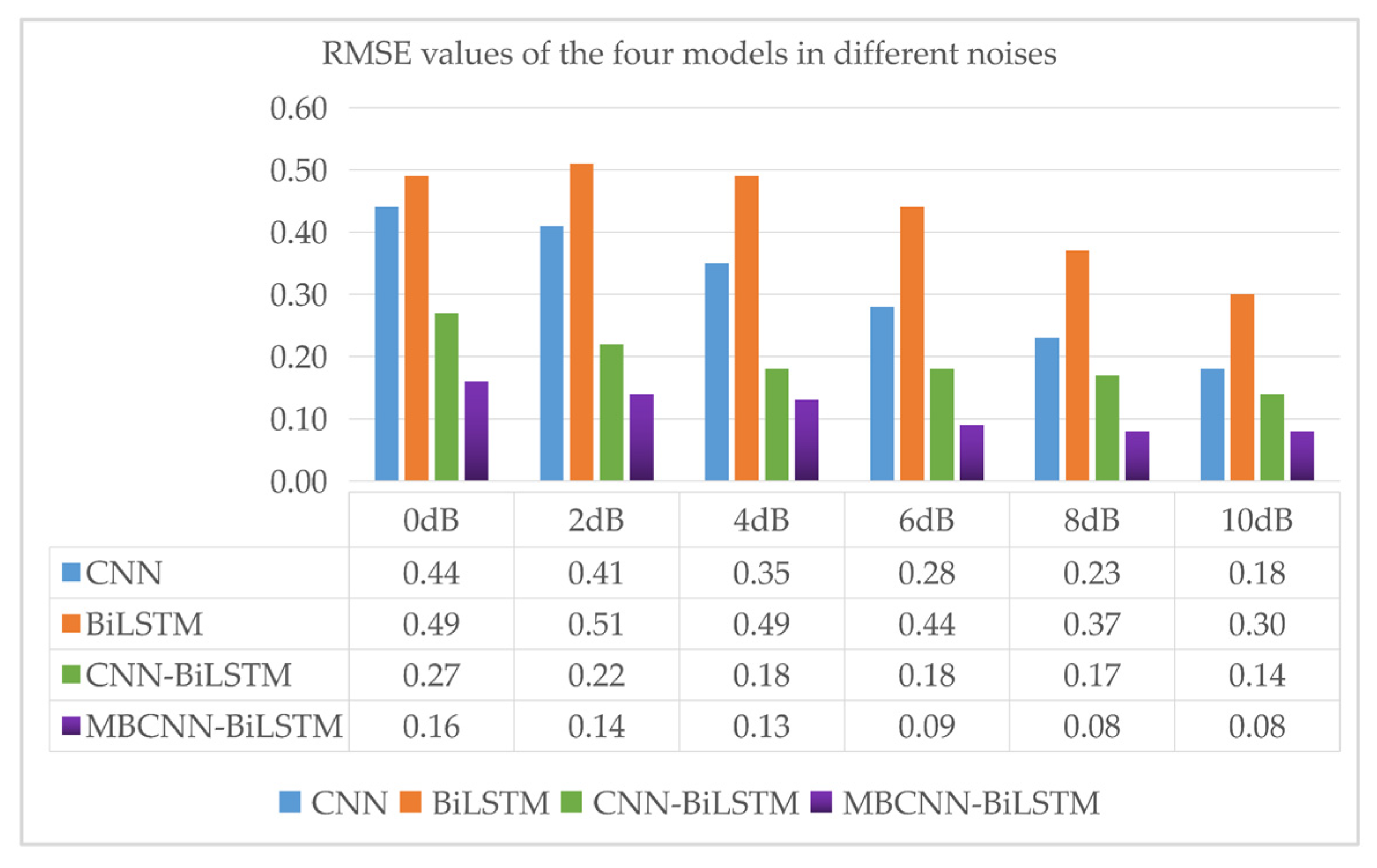
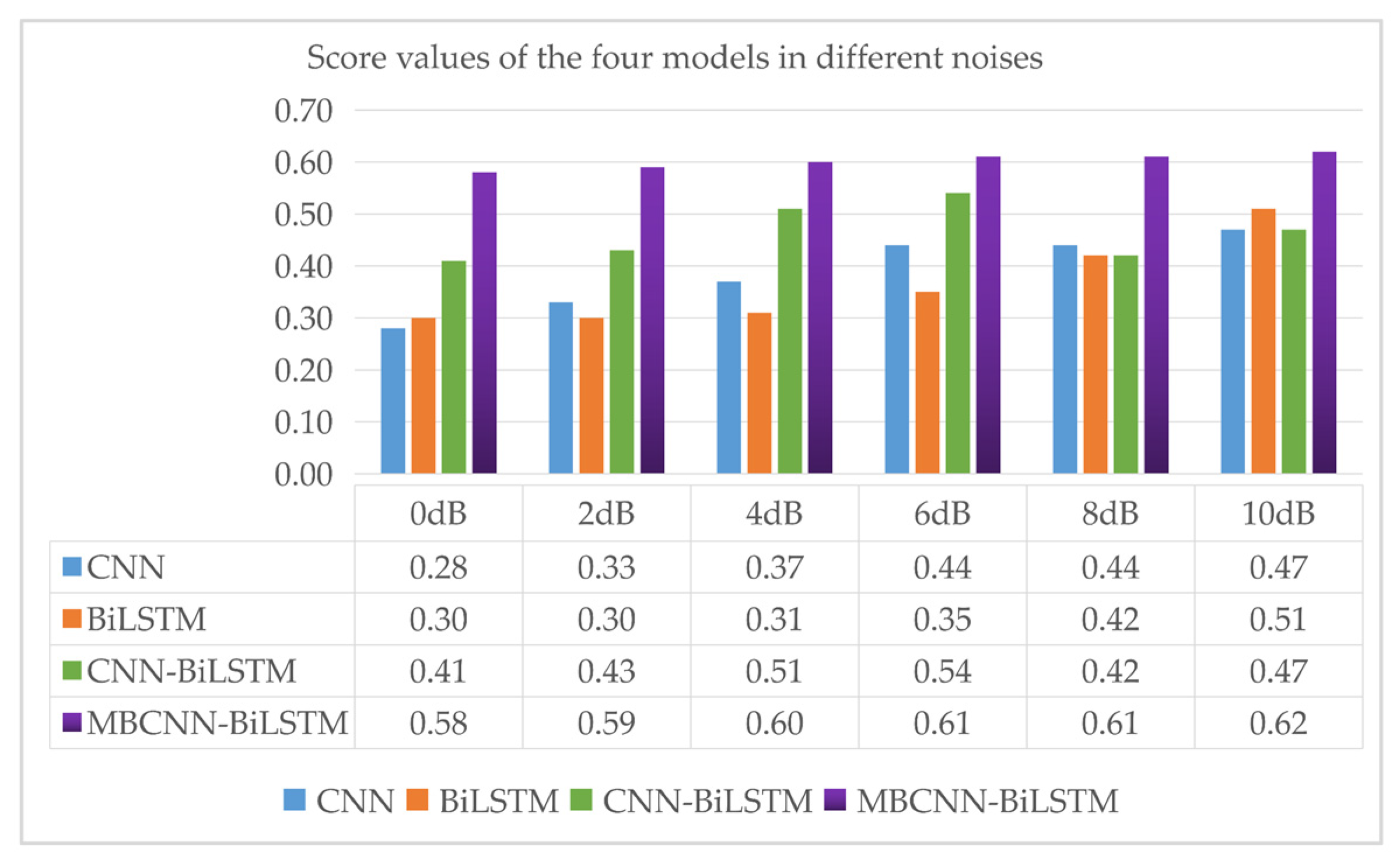
4.5. Noise Resistance Test
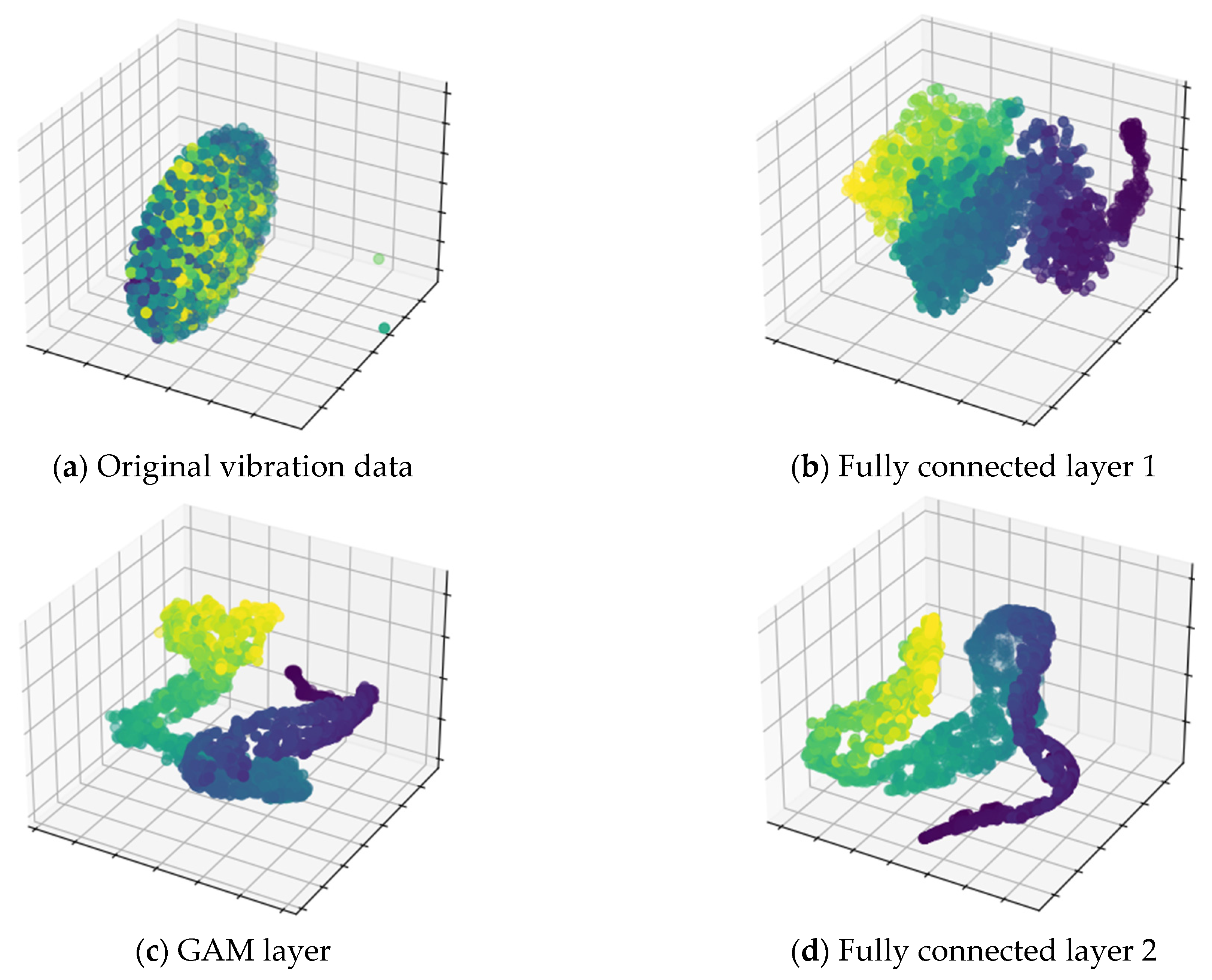
4.6. Visualization Analysis
5. Conclusions
- The proposed method is an end-to-end bearing RUL prediction method, in which the original data are directly input into the network for RUL prediction without manual extraction of degradation features;
- The spatial feature extraction of the bearing input data is realized by MBCNN, and then BiLSTM further mines the data for temporal features. The GAM attentional mechanism is more conducive to focusing on the key information in the features, which improves the prediction accuracy of the bearings’ RUL;
- It has been shown that the average absolute error and root mean square error of prediction are reduced by “22.2%” to “50.0%” and “26.1%” to “52.8%”, respectively, compared with some existing prediction methods, which proves the effectiveness and feasibility of the proposed method. It is proved that the method proposed in this paper can reduce the prediction error in bearing RUL and has certain advantages over other methods.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singleton, R.K.; Strangas, E.G.; Aviyente, S. The Use of Bearing Currents and Vibrations in Lifetime Estimation of Bearings. IEEE Trans. Industr. Inform. 2017, 13, 1301–1309. [Google Scholar] [CrossRef]
- Safaeipour, H.; Forouzanfar, M.; Casavola, A. A survey and classification of incipient fault diagnosis approaches. J. Process Control 2021, 97, 1–16. [Google Scholar] [CrossRef]
- Tedesco, F.; Akram, W.; Forouzanfar, M.; Casavola, A.; Famularo, D. Predictive maintenance of actuators in linear systems: A receding horizon set-theoretic approach. Int. J. Robust Nonlinear Control 2022, 11, 6395–6411. [Google Scholar] [CrossRef]
- Islam, M.M.; Kim, J.M. Reliable multiple combined fault diagnosis of bearings using heterogeneous feature models and multiclass support vector Machines. Reliab. Eng. Syst. Saf. 2019, 184, 55–66. [Google Scholar] [CrossRef]
- Qin, Y.; Xiang, S.; Chai, Y.; Chen, H. Macroscopic-microscopic attention in LSTM networks based on fusion features for gear remaining life prediction. IEEE Trans. Ind. Electron. 2020, 67, 10865–10875. [Google Scholar] [CrossRef]
- An, D.; Kim, N.H.; Choi, J. Practical options for selecting data-driven or physics-based prognostics algorithms with reviews. Reliab. Eng. Syst. Saf. 2015, 133, 223–236. [Google Scholar] [CrossRef]
- Chen, C.; Li, B.; Guo, J.; Liu, Z.; Qi, B.; Hua, C. Bearing life prediction method based on the improved FIDES reliability model. Reliab. Eng. Syst. Saf. 2022, 227, 108746. [Google Scholar] [CrossRef]
- Cui, L.; Wang, X.; Wang, H.; Ma, J. Research on Remaining Useful Life Prediction of Rolling Element Bearings Based on Time-Varying Kalman Filter. IEEE Trans. Instrum. Meas. 2020, 69, 2858–2867. [Google Scholar] [CrossRef]
- Cui, L.; Wang, X.; Xu, Y.; Jiang, H.; Zhou, J. A novel Switching Unscented Kalman Filter method for remaining useful life prediction of rolling bearing. Measurement 2019, 135, 678–684. [Google Scholar] [CrossRef]
- Vashishtha, G.; Chauhan, S.; Yadav, N.; Kumar, A.; Kumar, R. A two-level adaptive chirp mode decomposition and tangent entropy in estimation of single-valued neutrosophic cross-entropy for detecting impeller defects in centrifugal pump. Appl. Acoust. 2022, 197, 108905. [Google Scholar] [CrossRef]
- Chauhan, S.; Singh, M.; Kumar Aggarwal, A. Bearing defect identification via evolutionary algorithm with adaptive wavelet mutation strategy. Measurement 2021, 179, 109445. [Google Scholar] [CrossRef]
- Chauhan, S.; Singh, M.; Kumar Aggarwal, A. An effective health indicator for bearing using corrected conditional entropy through diversity-driven multi-parent evolutionary algorithm. Struct. Health. Monit. 2021, 20, 2525–2539. [Google Scholar] [CrossRef]
- Ma, Q.; Lin, S.; Shen, L.; Wang, J.; Wei, J.; Yu, Z.; Cottrell, G.W. End-to-end incomplete time-series modeling from linear memory of latent variables. IEEE Trans. Cybern. 2020, 50, 4908–4920. [Google Scholar] [CrossRef]
- Chen, D.; Qin, Y.; Wang, Y.; Zhou, J. Health indicator construction by quadratic function-based deep convolutional auto-encoder and its application into bearing RUL prediction. Transactions 2021, 114, 44–56. [Google Scholar] [CrossRef]
- Loutas, T.H.; Roulias, D.; Georgoulas, G. Remaining useful life estimation in rolling bearings utilizing data-driven probabilistic E-support vectors regression. IEEE Trans. Rel. 2013, 62, 821–832. [Google Scholar] [CrossRef]
- Pan, Z.; Meng, Z.; Chen, Z.; Gao, W.; Shi, Y. A two-stage method based on extreme learning machine for predicting the remaining useful life of rolling-element bearings. Mech. Syst. Signal Process. 2020, 144, 106899. [Google Scholar] [CrossRef]
- García Nieto, P.J.; García-Gonzalo, E.; Sánchez Lasheras, F.; de Cos Juez, F.J. Hybrid PSO–SVM-based method for forecasting of the remaining useful life for aircraft engines and evaluation of its reliability. Reliab. Eng. Syst. Saf. 2015, 138, 219–231. [Google Scholar] [CrossRef]
- Han, T.; Pang, J.; Tan, A.C.C. Remaining useful life prediction of bearing based on stacked autoencoder and recurrent neural network. J. Manuf. Syst. 2021, 61, 576–591. [Google Scholar] [CrossRef]
- Qin, Y.; Chen, D.; Xiang, S.; Zhu, C. Gated dual attention unit neural networks for remaining useful life prediction of rolling bearings. IEEE Trans. Industr. Inform. 2020, 17, 6438–6447. [Google Scholar] [CrossRef]
- Wang, Y.; Ding, H.; Sun, X. Residual Life Prediction of Bearings Based on SENet-TCN and Transfer Learning. IEEE Access. 2022, 10, 123007–123019. [Google Scholar] [CrossRef]
- Jiang, C.; Liu, X.; Liu, Y.; Xie, M.; Liang, C.; Wang, Q. A Method for Predicting the Remaining Life of Rolling Bearings Based on Multi-Scale Feature Extraction and Attention Mechanism. Electronics 2022, 11, 3616. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Z.; Zuo, H.; Jiang, H.; Li, P.; Li, X. A DLSTM-Network-Based Approach for Mechanical Remaining Useful Life Prediction. Sensors 2022, 22, 5680. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Zhang, X. Convolutional neural network based on attention mechanism and Bi-LSTM for bearing remaining life prediction. Appl. Intell. 2022, 52, 1076–1091. [Google Scholar] [CrossRef]
- Wang, X.; Qiao, D.; Han, K.; Chen, X.; He, Z. Research on Predicting Remain Useful Life of Rolling Bearing Based on Parallel Deep Residual Network. Appl. Sci. 2022, 12, 4299. [Google Scholar] [CrossRef]
- Rawat, W.; Wang, Z. Deep convolutional neural networks for image classification: A comprehensive review. Neural Comput. 2017, 29, 2352–2449. [Google Scholar] [CrossRef]
- Liu, Y.; Shao, Z.; Hoffmann, N. Global attention mechanism: Retain information to enhance channel-spatial interactions. arXiv 2021, arXiv:2112.05561. [Google Scholar]
- Nectoux, P.; Gouriveau, R.; Medjaher, K.; Ramasso, E.; Morello, B.; Zerhouni, N.; Varnier, C. PRONOSTIA: An experimental platform for bearings accelerated degradation tests. In Proceedings of the 2012 IEEE International Conference on Prognostics and Health Management, Denver, CO, USA, 18–21 June 2012. [Google Scholar]
- Soualhi, A.; Medjaher, K.; Zerhouni, N. Bearing Health Monitoring Based on Hilbert–Huang Transform, Support Vector Machine, and Regression. IEEE Trans. Instrum. Meas. 2015, 64, 52–62. [Google Scholar] [CrossRef]
- Singleton, R.K.; Strangas, E.G.; Aviyente, S. Extended Kalman Filtering for Remaining-Useful-Life Estimation of Bearings. IEEE Trans. Ind. Electron. 2015, 62, 1781–1790. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions 1 | Conditions 2 | Conditions 3 | |
|---|---|---|---|
| Radial force/N | 4000 | 4200 | 5000 |
| Rotational Speed/ | 1800 | 1650 | 1500 |
| Bearing dataset | B1_1 | B2_1 | B3_1 |
| B1_2 | B2_2 | B3_2 | |
| B1_3 | B2_3 | B3_3 | |
| B1_4 | B2_4 | - | |
| B1_5 | B2_5 | - | |
| B1_6 | B2_6 | - | |
| B1_7 | B2_7 | - |
| Structure Name | Parameter | Activation Function |
|---|---|---|
| Convolutional layer 1 | (16, 64, 16) (16, 64, 8) | ReLu |
| Convolutional layer 2 | (16, 3, 1) (16, 3, 1) | ReLu |
| Convolutional layer 3 | (32, 3, 1) (32, 3, 1) | ReLu |
| Convolutional layer 4 | (64, 3, 1) (64, 3, 1) | ReLu |
| Convolutional layer 5 | (64, 3, 1) (64, 3, 1) | ReLu |
| Fully connected layer 1 | 128 | ReLu |
| Connect | - | - |
| BiLSTM layer | Hidden size 16 | tanh |
| GAM layer | - | - |
| Fully connected layer 2 | 100 | ReLu |
| Output layer | 1 | - |
| Model | MAE | RMSE | Score |
|---|---|---|---|
| CNN | 0.09 | 0.10 | 0.43 |
| BiLSTM | 0.12 | 0.16 | 0.50 |
| CNN-BiLSTM | 0.07 | 0.08 | 0.51 |
| MBCNN-BiLSTM | 0.06 | 0.07 | 0.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Huang, F.; Qin, H.; Pan, J. Research on Remaining Useful Life Prediction of Bearings Based on MBCNN-BiLSTM. Appl. Sci. 2023, 13, 7706. https://doi.org/10.3390/app13137706
Li J, Huang F, Qin H, Pan J. Research on Remaining Useful Life Prediction of Bearings Based on MBCNN-BiLSTM. Applied Sciences. 2023; 13(13):7706. https://doi.org/10.3390/app13137706
Chicago/Turabian StyleLi, Jian, Faguo Huang, Haihua Qin, and Jiafang Pan. 2023. "Research on Remaining Useful Life Prediction of Bearings Based on MBCNN-BiLSTM" Applied Sciences 13, no. 13: 7706. https://doi.org/10.3390/app13137706