

On-Board Parameter Optimization for Space-Based Infrared Air Vehicle Detection Based on ADS-B Data
Abstract
:1. Introduction
2. Methodology
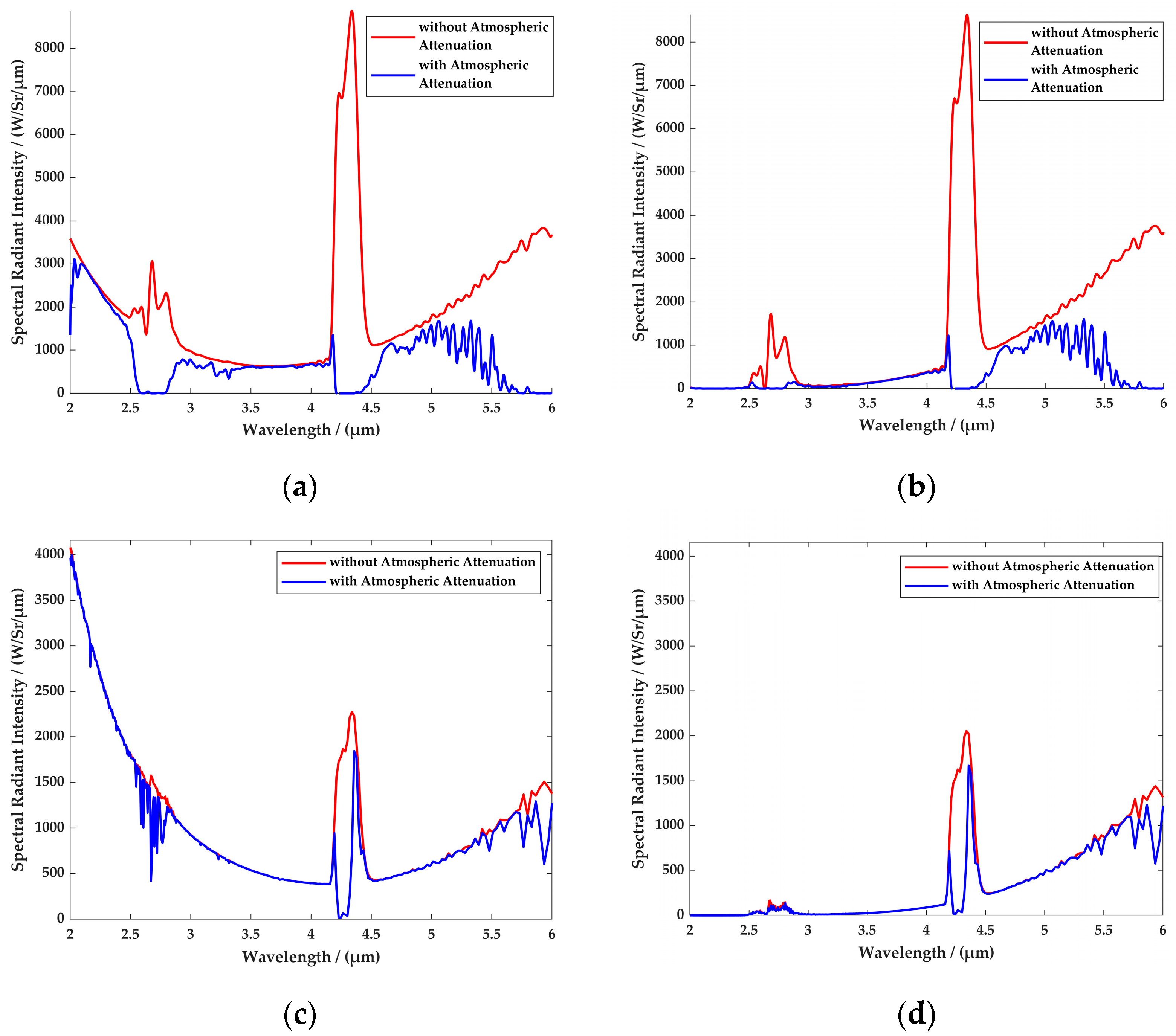
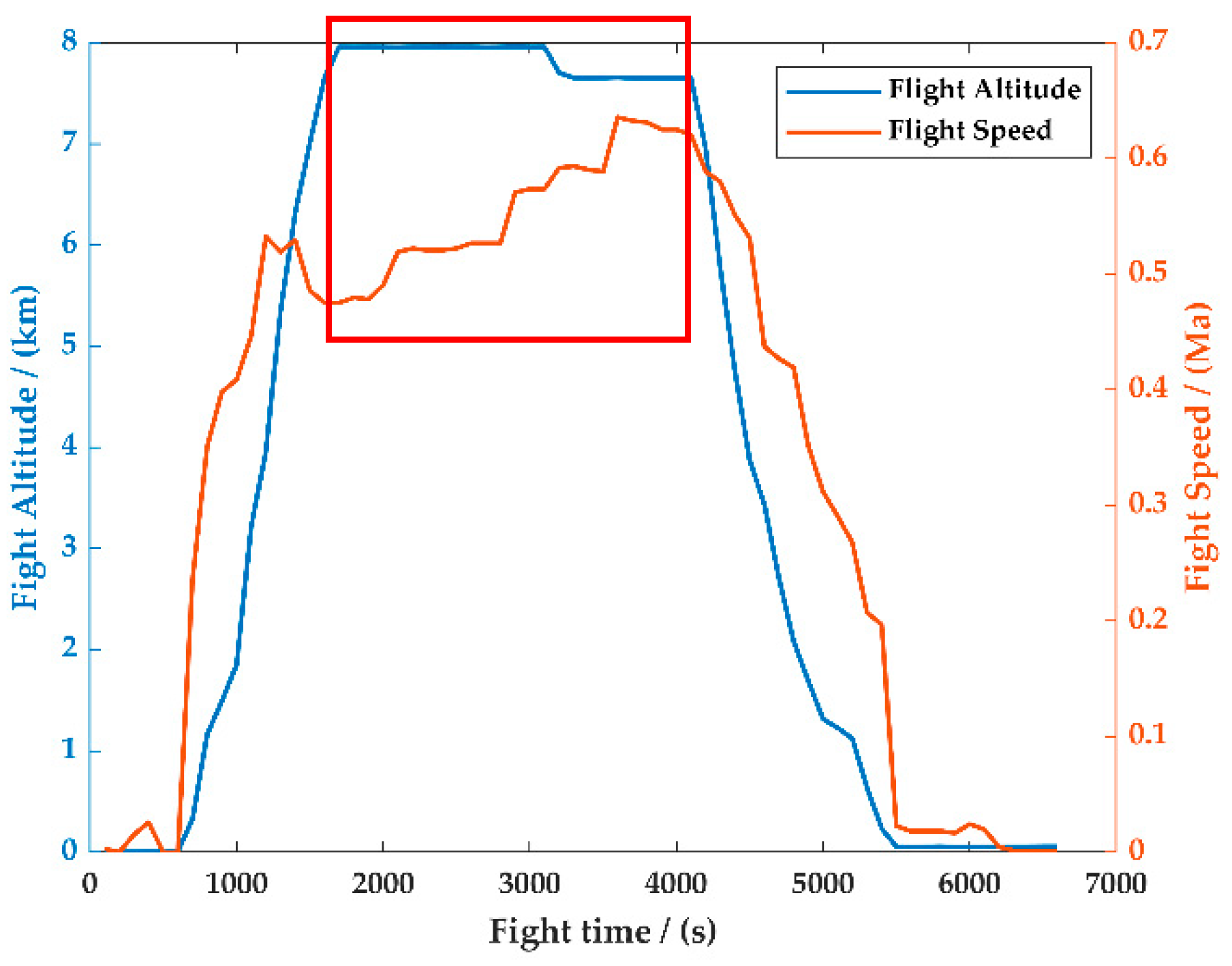
2.1. Spectral Characteristics of Civil Aircraft with Multiple Flight Phases
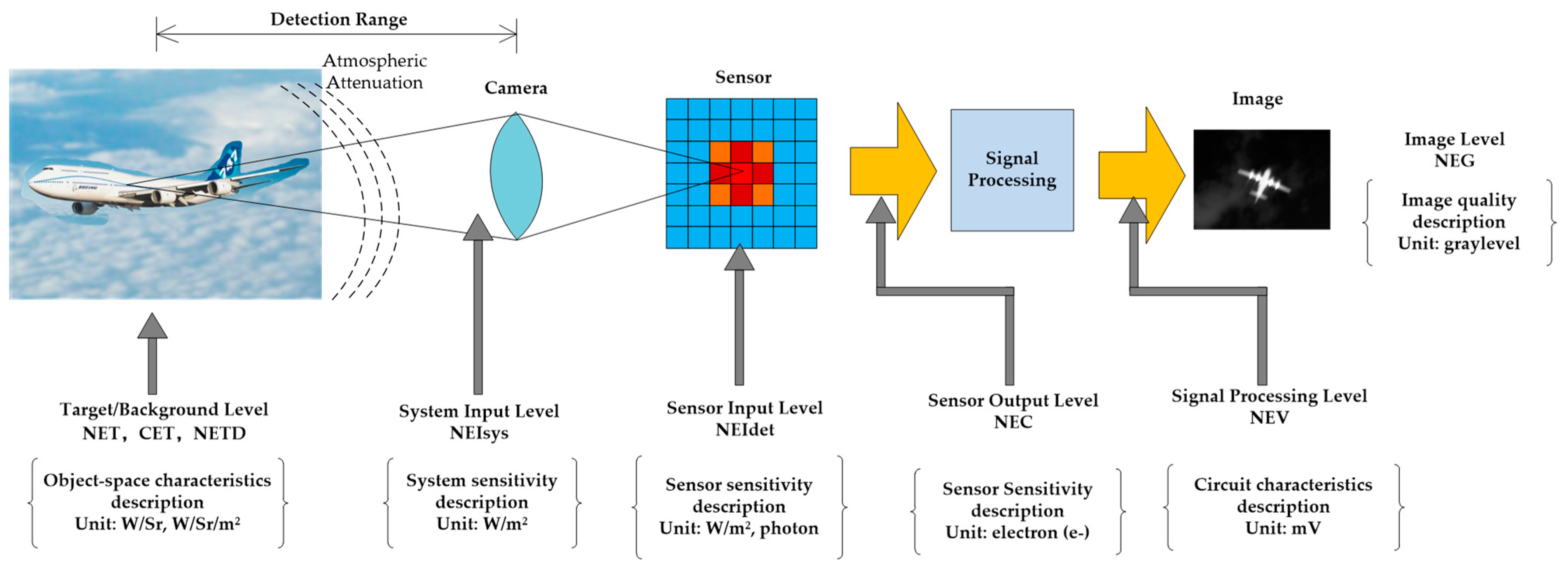
2.2. Electro-Optical Performance Model of a Space-Based Infrared System
2.2.1. Target Signal Model
2.2.2. Noise Model
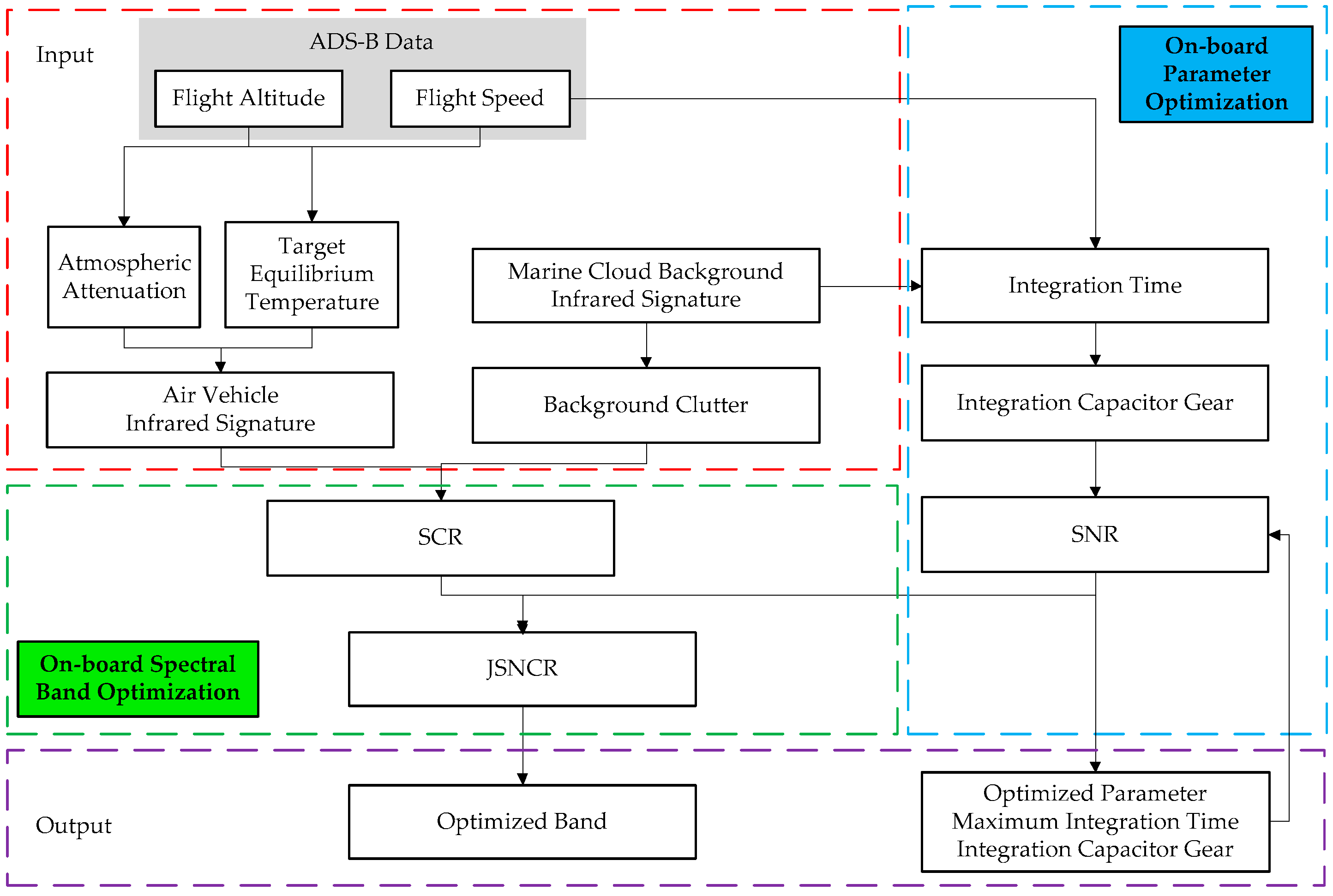
2.3. On-Board Parameter Optimization
2.3.1. On-Board Spectral Band Optimization
2.3.2. On-Board Parameter Optimization
3. Results and Discussion
3.1. Calculation Conditions
3.1.1. Multi-Phase Aircraft Infrared Signature
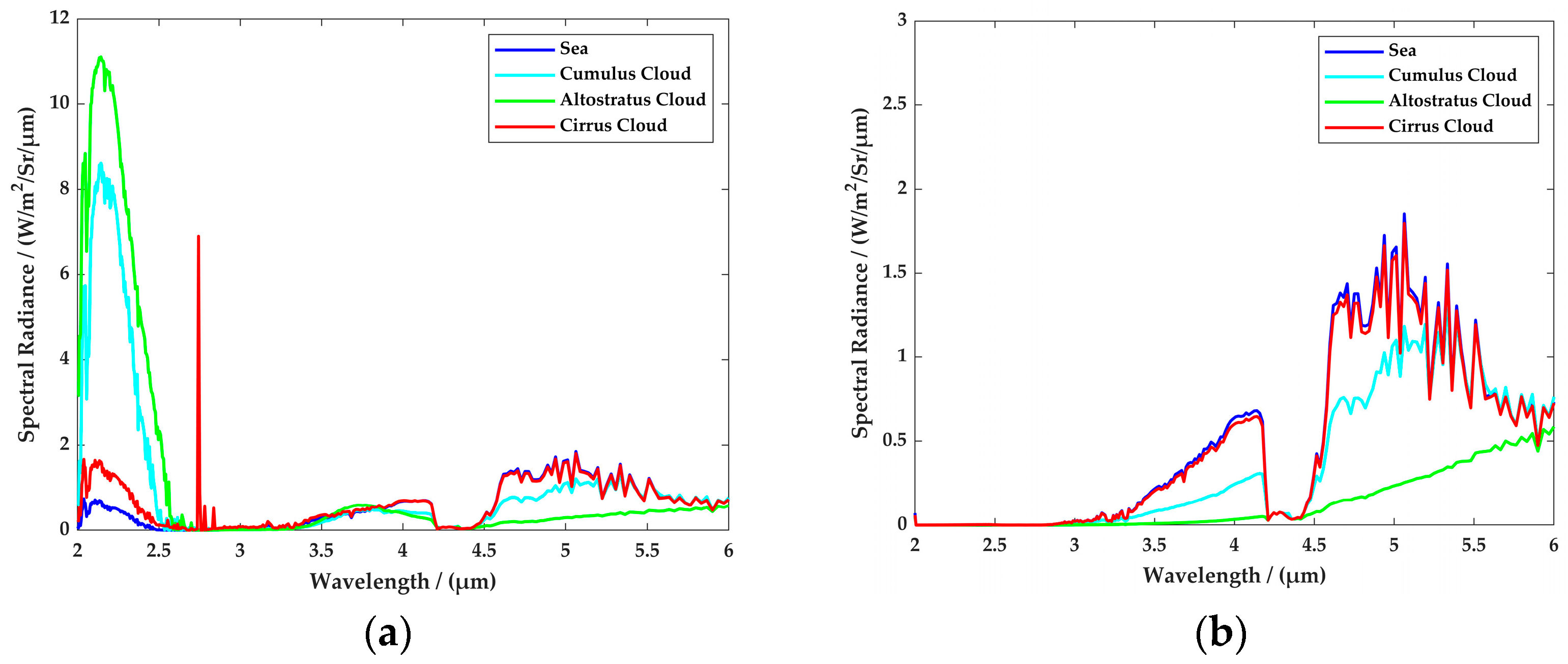
3.1.2. Background Simulation
3.1.3. Space-Based AVD System
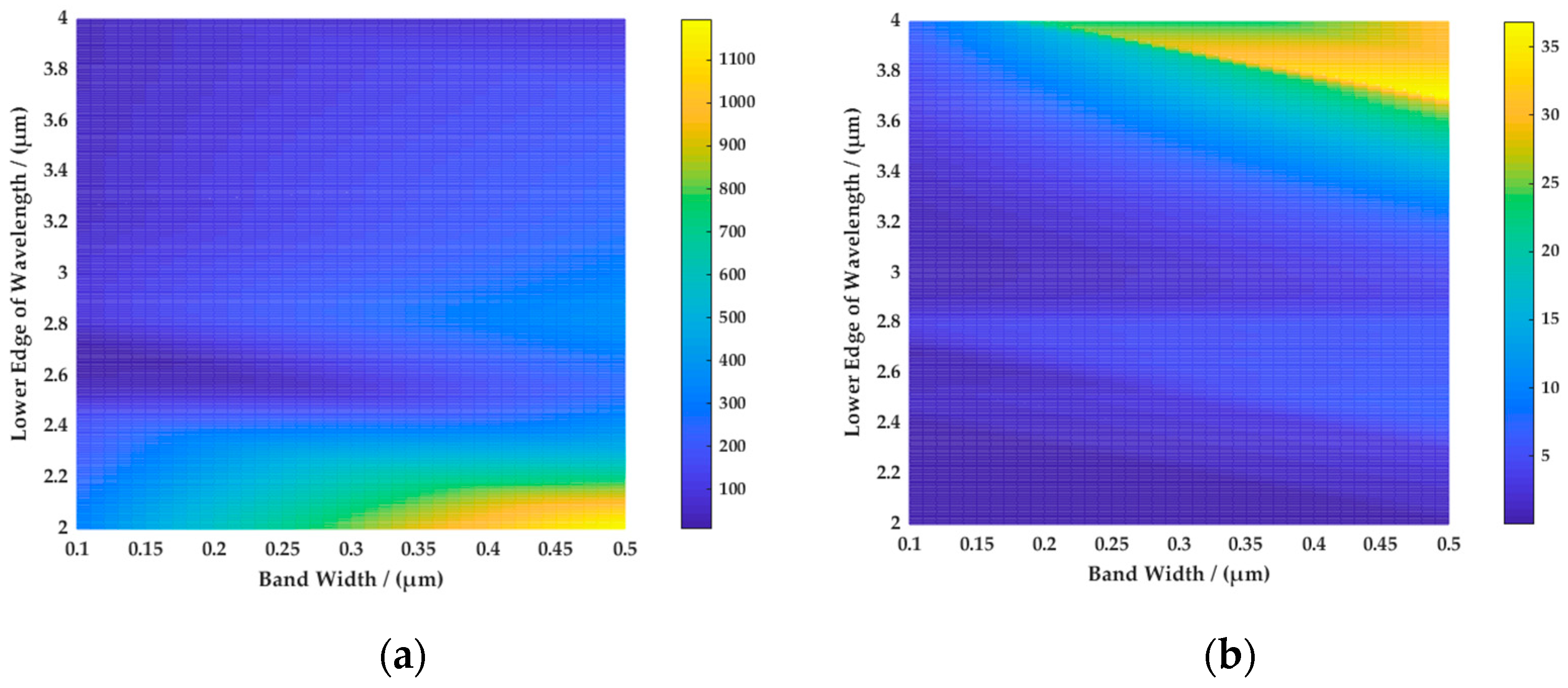
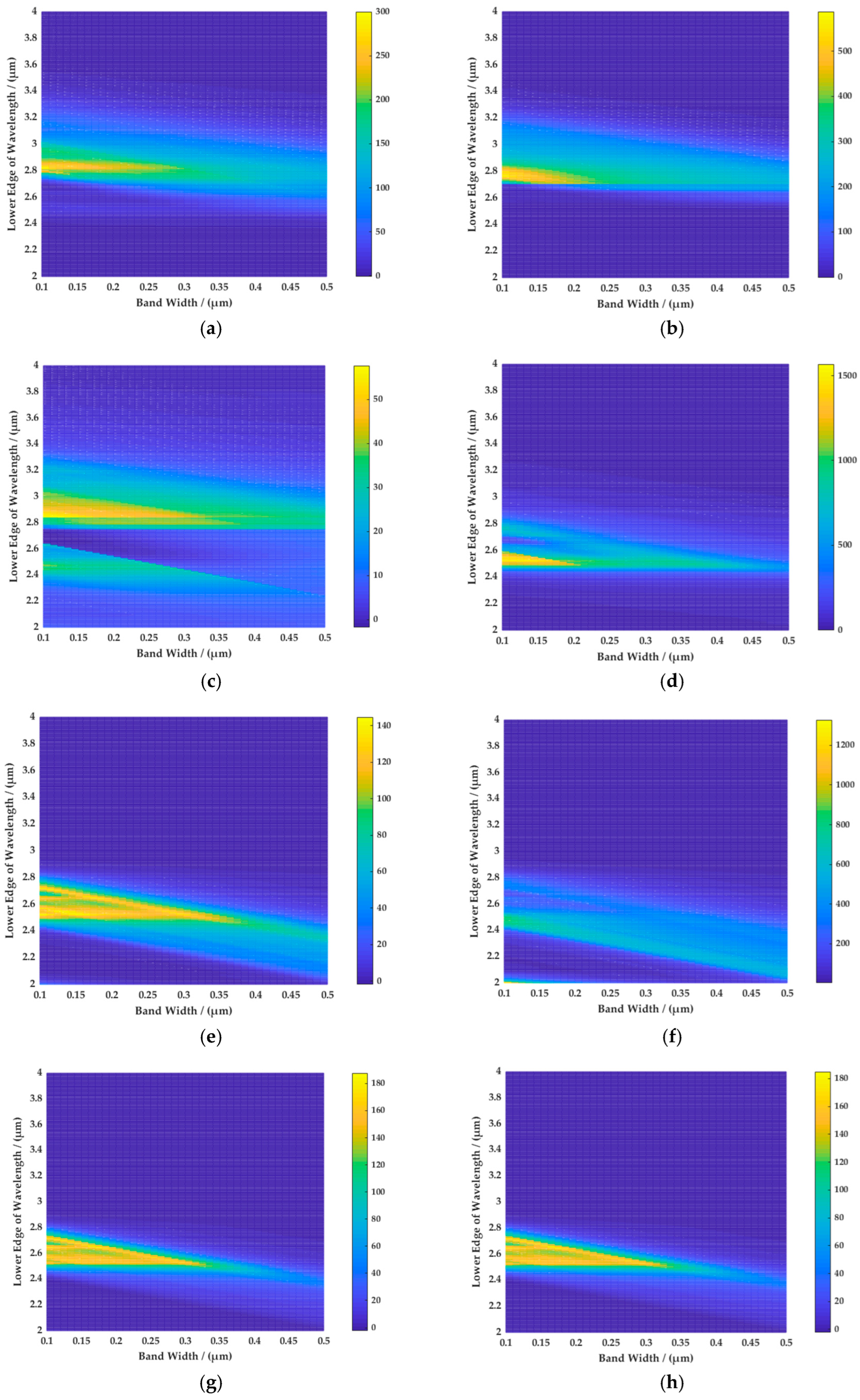
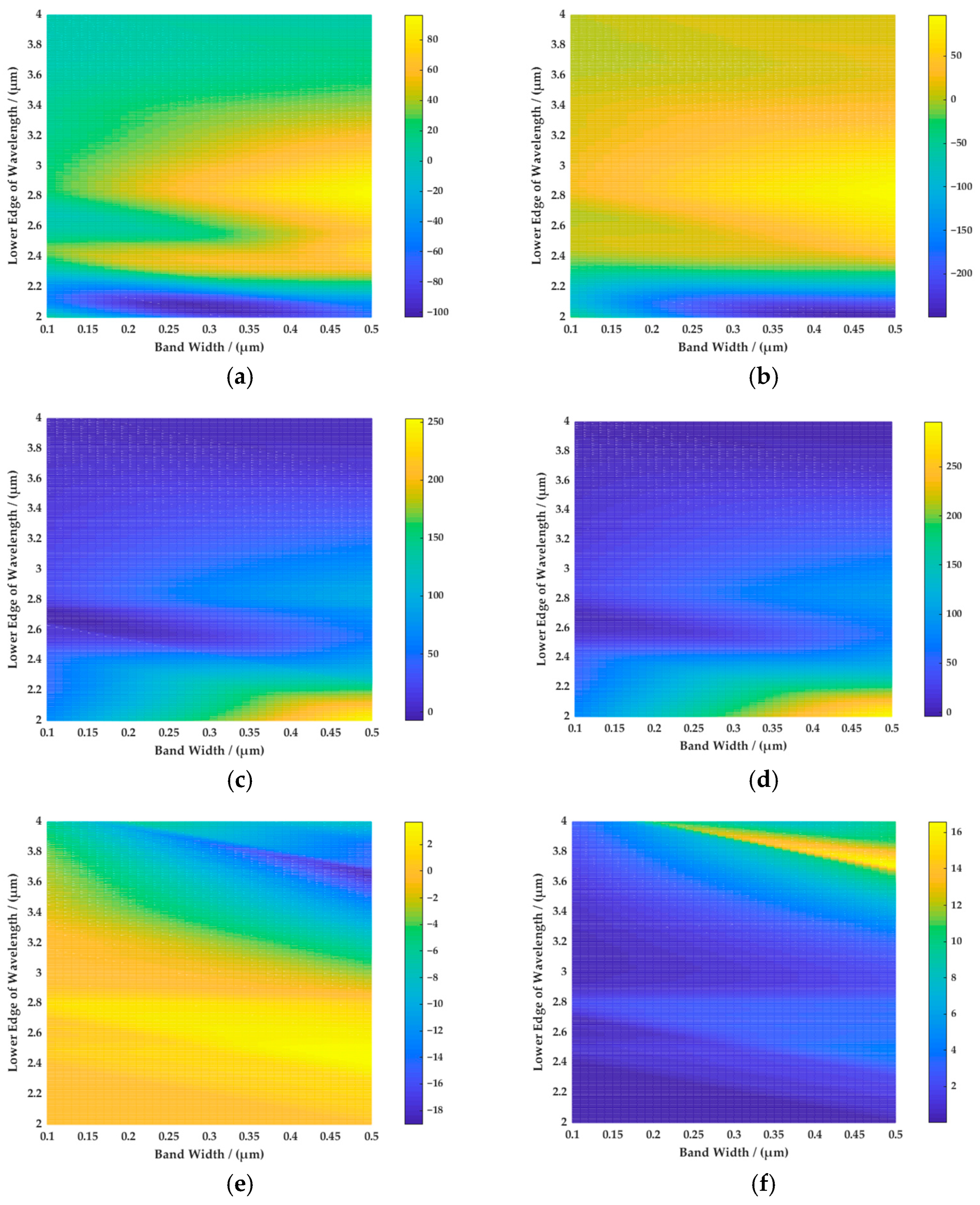
3.2. On-Board Spectral Band Optimization
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gnap, J.; Settey, T.; Beňová, D. Examining the Impact of Air Passenger Transport on International Long-Distance Regular Bus Transport in the Slovak Republic. MATEC Web. Conf. 2018, 236, 02007. [Google Scholar] [CrossRef]
- Oster, C.V.; Strong, J.S.; Zorn, C.K. Analyzing aviation safety: Problems, challenges, opportunities. Res. Transp. Econ. 2013, 43, 148–164. [Google Scholar] [CrossRef]
- Kožović, D.; Đurđević, D.; Dinulovic, M.; Milić, S.D.; Rašuo, B. Air traffic modernization and control: ADS-B system implementation update 2022: A review. FME Trans. 2023, 51, 117–130. [Google Scholar] [CrossRef]
- Wenjie, L.; Shiqiang, Y.; Chengliang, W.; Yan, O. SBIRS: Missions, Challenages and Oppotunities. In Proceedings of the 2019 IEEE 4th International Conference on Cloud Computing and Big Data Analysis (ICCCBDA), Chengdu, China, 12–15 April 2019; pp. 363–367. [Google Scholar]
- Olive, X.; Basora, L. Detection and identification of significant events in historical aircraft trajectory data. Transp. Res. Part C Emerg. Technol. 2020, 119, 102737. [Google Scholar] [CrossRef]
- Baker, K. Space-Based ADS-B: Performance, Architecture and Market. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–10. [Google Scholar]
- Corraro, G.; Corraro, F.; Ciniglio, U.; Filippone, E.; Peinecke, N.; Theunissen, E. Implementation and Real-Time Validation of a European Remain Well Clear Function for Unmanned Vehicles. Aerospace 2022, 9, 531. [Google Scholar] [CrossRef]
- Mahulikar, S.P.; Sane, S.K.; Gaitonde, U.N.; Marathe, A.G. Numerical studies of infrared signature levels of complete aircraft. Aeronaut. J. 2001, 105, 185–192. [Google Scholar] [CrossRef]
- Mahulikar, S.P.; Sonawane, H.R.; Arvind Rao, G. Infrared signature studies of aerospace vehicles. Prog. Aerosp. Sci. 2007, 43, 218–245. [Google Scholar] [CrossRef]
- Coiro, E.; Lefebvre, S.; Ceolato, R. Infrared Signature Prediction for Low Observable Air Vehicles. In Proceedings of the AVT-324 Specialists’ Meeting on Multi-disciplinary design approaches and performance assessment of future combat aircraft, Online, 28–30 September 2020; p. MP–AVT–324-08. [Google Scholar]
- Zhu, H.; Li, Y.; Hu, T.; Rao, P. An all-attitude motion characterization and parameter analysis system for aerial targets. Infrared Laser Eng. 2018, 47 (Suppl. S1), 160–165. [Google Scholar]
- Zhu, H.; Li, Y.; Hu, T.; Rao, P. Key parameters design of aerial target detection system on the space-based platform. Opt. Eng. 2018, 57, 023107. [Google Scholar] [CrossRef]
- Bai, Y.; Zhang, C.; Wang, B.; Li, S.; Ma, B. Simulation of airborne terminal infrared countermeasure operational effectiveness. Infrared Laser Eng. 2022, 51, 20220105. [Google Scholar] [CrossRef]
- Lee, J.H.; Chae, J.H.; Ha, N.K.; Kim, D.G.; Jang, H.S.; Myong, R.S. Efficient Prediction of Aerodynamic Heating of a High Speed Aircraft for IR Signature Analysis. J. Korean Soc. Aeronaut. Space Sci. 2019, 47, 768–778. [Google Scholar]
- Kou, T.; Zhou, Z.; Liu, H.; Yang, Y.; Lu, C. Multispectral radiation envelope characteristics of aerial infrared targets. Opt. Laser Technol. 2018, 103, 251–259. [Google Scholar] [CrossRef]
- Kou, T.; Zhou, Z.; Liu, H.; Yang, Y. Multi-band composite detection and recognition of aerial infrared point targets. Infrared Phys. Technol. 2018, 94, 102–109. [Google Scholar] [CrossRef]
- Ni, X.; Yu, S.; Su, X.; Chen, F. Detection spectrum optimization of stealth aircraft targets from a space-based infrared platform. Opt. Quantum Electron. 2022, 54, 151. [Google Scholar] [CrossRef]
- Yadav, D.; Arora, M.K.; Tiwari, K.C.; Ghosh, J.K. Identification of most useful spectral ranges in improvement of target detection using hyperspectral data. Egypt. J. Remote Sens. Space Sci. 2019, 22, 347–357. [Google Scholar] [CrossRef]
- Shang, X.; Song, M.; Wang, Y.; Yu, C.; Yu, H.; Li, F.; Chang, C.I. Target-Constrained Interference-Minimized Band Selection for Hyperspectral Target Detection. IEEE Trans. Geosci. Remote Sens. 2021, 59, 6044–6064. [Google Scholar] [CrossRef]
- Yuan, H.; Wang, X.-R.; Yuan, Y.; Li, K.; Zhang, C.; Zhao, Z.-S. Space-based full chain multi-spectral imaging features accurate prediction and analysis for aircraft plume under sea/cloud background. Opt. Express 2019, 27, 26027–26043. [Google Scholar] [CrossRef]
- Yuan, H.; Wang, X.-R.; Guo, B.-T.; Ren, D.; Zhang, W.-G.; Li, K. Performance analysis of the infrared imaging system for aircraft plume detection from geostationary orbit. Appl. Opt. 2019, 58, 1691–1698. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, K.; Niu, S.; Yan, J. Anti-interference aircraft-tracking method in infrared imagery. Sensors 2019, 19, 1289. [Google Scholar] [CrossRef] [Green Version]
- Hou, X.; Ma, J.; Zang, S. Airborne infrared aircraft target detection algorithm based on YOLOv4-tiny. J. Phys. Conf. Ser. 2021, 1865, 042007. [Google Scholar] [CrossRef]
- Zhou, X.; Jiang, L.; Hu, C.; Lei, S.; Zhang, T.; Mou, X. YOLO-SASE: An Improved YOLO Algorithm for the Small Targets Detection in Complex Backgrounds. Sensors 2022, 22, 4600. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Quijano, K.; Crawford, M.M. YOLOv5-Tassel: Detecting Tassels in RGB UAV Imagery With Improved YOLOv5 Based on Transfer Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8085–8094. [Google Scholar] [CrossRef]
- Tu, X.; Yuan, Z.; Liu, B.; Liu, J.; Hu, Y.; Hua, H.; Wei, L. An improved YOLOv5 for object detection in visible and thermal infrared images based on contrastive learning. Front. Phys. 2023, 11, 1193245. [Google Scholar] [CrossRef]
- Jiang, C.; Ren, H.; Ye, X.; Zhu, J.; Zeng, H.; Nan, Y.; Sun, M.; Ren, X.; Huo, H. Object detection from UAV thermal infrared images and videos using YOLO models. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102912. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, X.; Sethi, V.; Nalianda, D.; Li, Y.-G.; Wang, L. Review of modern low emissions combustion technologies for aero gas turbine engines. Prog. Aerosp. Sci. 2017, 94, 12–45. [Google Scholar] [CrossRef] [Green Version]
- Coiro, E.; Chatelard, C.; Durand, G.; Langlois, S.; Martinenq, J.-P. Experimental validation of an aircraft infrared signature code for commercial airliners. In Proceedings of the 43rd AIAA Thermophysics Conference, New Orleans, LA, USA, 25–28 June 2012; Fluid Dynamics and Co-located Conferences. American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2012. [Google Scholar]
- Reinov, A.; Bushlin, Y.; Devir, A.; Lessin, A.; Mendelewicz, I.; Vainshtein, A. Thermal and signature modeling of commercial aircraft. In Proceedings of the International Target and Background Modeling & Simulation Workshop, Toulouse, France, 27–30 June 2011. [Google Scholar]
- Terrence, S.L.; Erich, D.H.-B. Translation of spectral radiance levels, band choices, and signal-to-noise requirements to focal plane specifications and design constraints. In Proceedings of the SPIE, San Diego, CA, USA, 26–28 February 2002; pp. 263–307. [Google Scholar]
- Silk, J. Statistical Variance Analysis of Clutter Scenes and Applications to a Target Acquisition Test; IDA Paper P-2950 Institute for Defense Analysis: Alexandria, VA, USA, 1995. [Google Scholar]
- Schmieder, D.E.; Weathersby, M.R. Detection Performance in Clutter with Variable Resolution. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 622–630. [Google Scholar] [CrossRef]
- Chang, H.; Zhang, J. Detection probability and detection time using clutter metrics. Infrared Phys. Technol. 2007, 51, 83–90. [Google Scholar] [CrossRef]
- Lance, M.K.; Romain, M.; Edward, A.; Kameswara Rao, N. Effect of signal-to-clutter ratio on template-based ATR. In Proceedings of the SPIE, Orlando, FL, USA, 13–16 April 1998; pp. 408–419. [Google Scholar]
- Stair, A. MSX design parameters driven by targets and backgrounds. Johns Hopkins Appl. Technol. Dig. 1996, 17, 11. [Google Scholar]
- Yu, S.; Ni, X.; Li, X.; Hu, T.; Chen, F. Real-time dynamic optimized band detection method for hypersonic glide vehicle. Infrared Phys. Technol. 2022, 121, 104020. [Google Scholar] [CrossRef]
- Mei, F.; Chen, S.; Jiang, Y.; Cai, J. A Preliminary Model of Infrared Image Generation for Exhaust Plume. Int. J. Image Graph. Signal Process. 2011, 3, 46–52. [Google Scholar] [CrossRef]
- Martinez, R. Modeling the Infrared Intensity of a Large Commercial Aircraft; Air Force Institute of Technology, School of Engineering and Management: Wright-Patterson Air Force Base, OH, USA, 2005. [Google Scholar]
- Memarzadeh, M.; Matthews, B.; Avrekh, I. Unsupervised Anomaly Detection in Flight Data Using Convolutional Variational Auto-Encoder. Aerospace 2020, 7, 115. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, R.; Le, N.; Zheng, Y. A method for the outlier flights detection of the final approach based on FOQA data. In Proceedings of the 2019 IEEE 1st International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Kunming, China, 17–19 October 2019; pp. 7–11. [Google Scholar] [CrossRef]
- Dulski, R.; Sosnowski, T.; Polakowski, H. A method for modelling IR images of sky and clouds. Infrared Phys. Technol. 2011, 54, 53–60. [Google Scholar] [CrossRef]
- Shimshon, N.L.; Nissim, B.-Y.; Amotz, W. Simulation of ground-based infrared cloudy sky images. Opt. Eng. 1993, 32, 1290–1297. [Google Scholar] [CrossRef]
- Liou, K.N.; Ou, S.C.; Takano, Y.; Roskovensky, J.; Mace, G.G.; Sassen, K.; Poellot, M. Remote sensing of three-dimensional inhomogeneous cirrus clouds using satellite and mm-wave cloud radar data. Geophys. Res. Lett. 2002, 29, 74–1–74-4. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Fixed Parameter | Proposed |
|---|---|---|
| Orbit altitude | 36,000 km | 36,000 km |
| Optical aperture | 2.3 m | 2.3 m |
| 70 m | 70 m | |
| Detection band | 2.7–3.0 μm (fixed) | 2.0–4.5 µm, Dynamically adjustable |
| Integration time | 100 ms (daytime), 200 ms (nighttime) | 10 μs–1000 ms, Dynamically adjustable |
| Integration capacitance gear (full well) | 3 × 106 e−, 6 × 106 e− (default 3 × 106 e−) | 3 × 106 e−, 6 × 106 e−, Dynamically adjustable |
| Background | Fixed Parameter | Proposed | |
|---|---|---|---|
| daytime | Cumulus cloud | 36.47@2.7–3.0 | 61.03@2.822–3.244 |
| Altostratus cloud | 45.57@2.7–3.0 | 79.27@2.787–3.287 | |
| Cirrus cloud | 4.18@2.7–3.0 | 27.49@2.842–3.112 | |
| Sea | 43.75@2.7–3.0 | 83.56@2.45–2.95 | |
| nighttime | Cumulus cloud | 2.38@2.7–3.0 | 3.63@2.45–2.95 |
| Altostratus cloud | 2.88@2.7–3.0 | 4.08@2.45–2.95 | |
| Cirrus cloud | 1.95@2.7–3.0 | 3.47@2.45–2.95 | |
| Sea | 2.04@2.7–3.0 | 3.47@2.45–2.95 | |
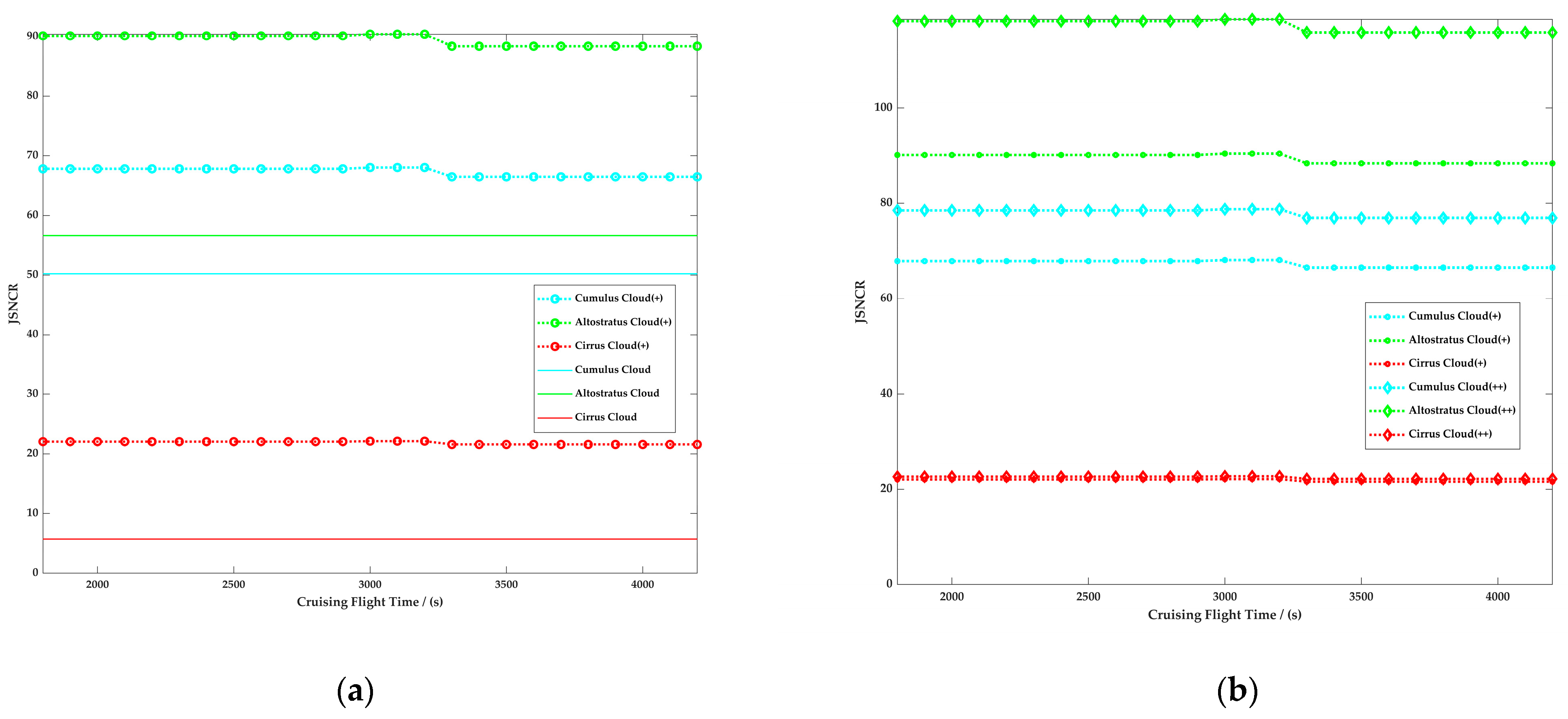
| Background | Fixed Parameter | Proposed On-Board Spectral Band Optimization | Proposed On-Board Spectral Band Optimization and On-Board Parameter Optimization |
|---|---|---|---|
| Cirrus cloud | 5.66 | 22.02 | 22.68 |
| Cumulus cloud | 56.67 | 66.49–67.83 | 76.9–78.47 |
| Altostratus cloud | 50.21 | 88.37–90.42 | 115.88–118.22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Rao, P.; Li, Z.; Ai, J. On-Board Parameter Optimization for Space-Based Infrared Air Vehicle Detection Based on ADS-B Data. Appl. Sci. 2023, 13, 6931. https://doi.org/10.3390/app13126931
Li Y, Rao P, Li Z, Ai J. On-Board Parameter Optimization for Space-Based Infrared Air Vehicle Detection Based on ADS-B Data. Applied Sciences. 2023; 13(12):6931. https://doi.org/10.3390/app13126931
Chicago/Turabian StyleLi, Yejin, Peng Rao, Zhengda Li, and Jianliang Ai. 2023. "On-Board Parameter Optimization for Space-Based Infrared Air Vehicle Detection Based on ADS-B Data" Applied Sciences 13, no. 12: 6931. https://doi.org/10.3390/app13126931