6.2.1. Mapping and Surveying
The authors of [
67] tested a lidar system that was placed on a helium balloon on Sherman Island near Antioch, California. They used a Velodyne HDL-32E lidar scanner with a pulse frequency of 700 kHz and a range of up to 100 m at a flight height of approximately 25 m AGL. The RMSE had a value of 0.09 m. The nominal density of points was 1000 points/m
2. In their publication [
68], the authors investigated the detection of the globalized probability of boundary (gPb) contours using a UAV. They mapped three rural areas in Germany, France, and Indonesia. In Toulouse, France, data were captured with direct georeferencing using a DT 18 PPK and a DT-3Bands RGB camera, with a resulting GSD error of 3.61 cm. In Amtsvenn, Germany, a GerMAP G180 UAV model with a Ricoh GR camera was used with a resulting GSD error of 4.86 cm. Data in Germany and in Indonesia were captured using GCP. For mapping in Lunyuk, Indonesia, they used a DJI Phantom 3 UAV with a Sony EXMOR FC300S camera. The resulting GSD was 3.00 cm. The measurements resulted in three ortho-images of different scales. The authors of [
69] demonstrated improvements to the UAV multispectral mapping technique for higher resolution imagery in the terrain over the Indian River Lagoon along the central Atlantic coast of Florida. They use a Parrot Bluegrass quadcopter with a Parrot Sequoia+ multispectral sensor and a DJI Phantom 4 Pro quadcopter equipped with an RGB CMOS camera sensor. As a result, data were collected from a flight altitude of 120 m from which ortho-mosaics, Digital Surface Model (DSM), Digital Elevation Model (DEM), and point clouds were produced. In the study [
70], waterfowl in the west of the Songnen Plain, Jilin Province, China, was monitored using UAV technology. A Phantom 4 Advanced UAV equipped with an FC6310 camera and a Nikon MONARCH 82ED-A monocular telescope were used for this survey. Tucci et al. [
71] used the UAV to monitor and calculate the stockpile volumes of material from sorted waste collection, producing 3D models from point clouds. They used a DJI Phantom 4 Pro UAV. Zanutta et al. [
72] monitored coastal and beach changes using a DJI Matrix 600 and a Spark UAV to produce DTM and ortho-images, and the authors [
73] used the DJI Phantom 2 UAV to map flood risks. The use of UAV photogrammetry or lidar technology in the field of mapping and surveying depends on various factors. When choosing a suitable method, it is important to consider instrumentation, required accuracy, finances, point density, or the interpretation of the resulting outputs. However, the use of photogrammetric methods is more advantageous than the use of lidar technology due to the ease of data acquisition, its flexible and fast use, its low purchase price, and the high density of point clouds.
The deployment of TLS and the SfM photogrammetric method has also been successful in the documentation of underground cave spaces [
6,
74,
75] to create 3D models of them. The authors of [
6] used the SfM photogrammetric method to take images with a Pentax K-5 DSLR digital camera with a Pentax SMC DA lens in Ochtiná Aragonite Cave, Slovakia. The authors of [
74] conducted a tectonic and morphological investigation of the Luo Shui Kong Cave. They used Agisoft PhotoScan
® Professional Edition, version 1.2 software to process the images and point cloud, from which a 3D model was made. The UAV is also used in the mapping of surface karst areas. The authors of [
76] investigated the area in the southwestern part of the geomorphological unit of the Slovak Karst using aerial and ground-based laser scanning. The airborne laser scanning data were obtained using a Leica ALS70-CM scanner. In total, 1.99 billion points with a point density of 29 points/m
2 were captured in the 68 km
2 area of interest. In reference [
77], the authors evaluated and classified the vegetation of karst wetlands in Huixian Karst National Wetland Park, Guilin, South China, using a DJI Phantom 4 Pro UAV and an FC6310S camera. They collected data during 12 flights, which were processed using Pix4D Mapper software to generate orotophotomosaics and DSM. The publication [
78] investigated the extraction of vegetation information in a karst area using a DJI Phantom 3SE. They captured images with 4000 × 3000 pixel resolution at a flight height of 150 m AGL. Yang et al. [
79] addressed biodiversity maintenance in karst areas. They chose the Maotiao Basin and Nanming Basin in the core of the South China Karst as their area of interest. Using DJI Phantom 4 Pro, they acquired 3507 images. Processing was performed using Pix4Dmapper software to generate digital orthophotomaps with a spatial resolution ranging from 1.5 cm to 5.3 cm. The UAV imagery was used for tree and shrub identification and habitat classification. When documenting underground cave spaces and mapping surface karst areas, we recommend the SfM photogrammetric method. With its help, we can observe wetland vegetation, complex reliefs, and numerous karst caves in karst areas, as well as the extraction of vegetation with higher accuracy and better effect. The advantage of combining UAV and SfM is obtaining information about vegetation in complex terrain areas, saving research time, and obtaining more targeted plants.
UAVs have also been applied in the mining industry [
80,
81,
82,
83]. The review article [
80] compiled 65 articles from 2010 to 2020. The articles used UAV AeroVironment RQ-11A Raven, Honeywell RQ-16A T-Hawk, Sensefly eBee, Skywalker X5, AscTec Falcon 8, DJI Phantom III, Aibotix Aibot X6v2, Albatros VT3, and Tholeg THO-R-PX8/10. As sensors, digital cameras, spectral imaging cameras, lidar, thermal infrared cameras, and gas sensors were mounted. Thanks to UAVs, the air was checked against hazardous substances from explosions in mines and quarries, mapped mineral extraction, or the exploration of the mined-out territory. The authors in the article [
81] used a DJI S1000 UAV with camera Sony ILCE A7R to map the Piekary and Jaworzno area in 2016. In 2020, it was a BIRDIE UAV with a Sony DSC-RX1RM2 camera. The deformations of the area caused by mining activity were surveyed. The results of spatial changes ranged from −0.5 m to +0.4 m. The article [
82] dealt with the study and protection of sites affected by mining activities in northwestern Spain’s Roman gold mining infrastructure. Non-contact technologies are used in such areas due to inaccessibility and remoteness. For the mapping, a DJI Phantom 4 with 12.4 Mpx FC330 camera was used. The flight was controlled using Pix4D field software. Based on the acquired data, seven models were created for the monitored site. All models were created from images from 270 to 536, except model nr. 7, which was generated using 63 images. Therefore, the GSD value of 13 cm is also less accurate for this model. For the others, the GSD ranged from 1.8 cm to 4.9 cm. The flight was performed at a height of 50 m AGL. The number of GCPs range from 4 to 9, and the RMSE was calculated. The worst GCP—RMSE was for model No. 7, whose value ranged from 8.8 cm to 41 cm. The best GCP—RMS was in model No. 5, which varied from 0.6 cm to 11 cm. Most of the models consisted of 3D texture, ortho-mosaic, and DEM.
The UAV has been used to explore open pit mines in the articles [
84,
85,
86]. The authors of the article [
84] focused on the exploration of and research on iron mines in the Beijing area. Surface mining was observed in order to monitor changes and other processes in the area, such as pollution or erosion. The mapping of each open pit mine was carried out using the UAV SfM method. Furthermore, the purpose of this measurement was to mitigate the effects of anthropogenic changes caused by mining based on the geomorphological characteristics of the mines. The article [
85] was devoted to a review of the UAVs used in the basin areas with their sensors in 2015–2018. The research used 40 articles published in Australia, China, Finland, and other countries. UAVs have been applied in various sectors such as 3D reconstruction and pollution monitoring. Different types of UAVs such as fixed-wing and multi-rotor devices were compared. Sensors such as digital cameras, thermal infrared cameras, and others were also reviewed. The article is also addressed the future development of UAVs, where improvements could be made in the form of data-processing speed, technical advancement, and others. The article [
86] explored the application of a fast, inexpensive, and accurate method to monitor environmental changes affected by mining activities. A site in northeast Beijing was selected, where a UAV captured the area with two series of high-resolution images between 2014 and 2016. Using the SfM method, a DEM was created, from which geomorphic changes were assessed using DoD and SLLAC analyses. When monitoring soil surface deformations in areas affected by underground or surface mining, the application of UAV spatial data collection sensors has the advantage of performing quick field work and having a high detail of outputs while maintaining needed accuracy parameters. UAVs make it possible to document otherwise inaccessible parts of mines. The generation of high-resolution height models (DEM) from the results obtained using UAV is useful in the evaluation of geomorphic changes related to mining activities.
The authors of the articles [
87,
88,
89,
90,
91,
92,
93] discussed using UAVs in land registration. The article [
87] highlights UAV photogrammetry and laser scanning for cadastral mapping purposes in the Czech Republic in 12 test areas. Many points (fence corners, building corners) surveyed by conventional geodetic methods (RTK-GNSS, total station) and by UAV technology were compared. UAV carriers Hexacopter G6, MAVinci SIRIUS, and Trimble UX5, where sensors such as Canon EOS 700D, LumixGX1, SONY ILCE-6000, and DMC-GX1 were used for mapping. According to the results, an accuracy of 14 cm was achieved in more than 80% of the measurements. When comparing laser scanning and photogrammetry, the accuracy of the points determined from the lidar-based point cloud was found to be approximately 18% higher than that of the point cloud obtained by the photogrammetric point cloud with the 2 cm GSD. The article also compares the costs of conventional geodetic measurement methods and the new UAV technology. The research addresses the necessary changes in organizational and technological processes for using UAV technology. In the article [
88], the authors investigated and validated the applicability of UAVs for updating cadastral records in areas affected by landslides. The mapped area was in Limanowa in Poland, covering an area of 70 hectares, with the flight height varying over each line individually. The UAV used DJI S1000 with a Sony ILCE A7R sensor, a Sony FE 35 mm F2.8 lens, and a Zenmuse Z15-A7 gimbal. In total, 465 images were taken, of which 388 were used for processing. The purpose was to obtain the analysis results in four variations with a different number of control points and methods of measurement. Orthophoto maps and DSM were used to update the cadastral data. The maximum deviation for each control point did not exceed 10 cm. This research concluded that a larger number of control points should be used to create photogrammetric products, ensuring accurate and correct models. The article [
89] demonstrates the use of UAV technology in cadastral mapping, where automatically extracted boundaries are obtained from images. The boundaries were extracted using the ENVI feature Extraction (FX) module. The research was carried out in Slovenia in the municipality of Ponova. The area of the subject territory was 25 ha. A total of 12 GCP were used, evenly distributed over the mapped area, and determined by GNSS/RTK. For photogrammetric imaging, DJI Phantom 4 Pro with a 1″ CMOS 20 Mpix sensor was used. The UAV flew at a height of 80 m AGL, with a GSD value of 2 cm. The results of the accuracy evaluation showed that almost 80% of the extracted visible boundaries were correct. In the paper [
90], the authors discussed UAV technology to assist in verification surveys of land boundaries in digitized cadastral territories. This case study was conducted in Taiwan in the ChengDa district of Taipei City. The flight was conducted at a height of 300 m AGL using an AI-RIDER YJ-1000-HC UAV with a PhaseOne iXU150 medium-format camera. As a result, 230 images were acquired, and the GSD accuracy was 3 cm. The research shows the possibility of generating one cadastral map consistent with the actual details of the terrain. This approach can reduce human resource costs and improve the efficiency of future boundary verification surveys. The article [
91] discusses the mapping of large cadastral areas using UAVs. A rice field area of 80 ha in Trimulyo municipality, Indonesia, was selected for the research. In total, nine GCPs with a 12 cm RMSE were used. The flight was performed at a height of 250 m AGL, with a GSD value of 7.77 cm. The flying equipment was an RC high wing with a Nikon COOLPIX AW-120 photogrammetric sensor. This article demonstrates the successful use of a UAV-based remote sensing system to produce ortho-masaics as base maps for cadastre. The research in the paper [
92] discusses a technique based on deep fully convolutednetworks (FCN) that can automatically learn high-level spatial features from images to extract cadastral boundaries. For this research, the Busogo study area located in Rwanda was selected. In 2018, Charis used a UAV to image the area and obtained photographs that were subsequently analyzed. The article [
93] focuses on implementing UAV-based GNSS CORS UDIP to improve cadastral survey and urban development monitoring. The area of interest for this research was the city of Ngresep, which was flown over using a DJI Phantom 3 Professional with a Sony EXMOR sensor. The flight was conducted at a height of 182 m AGL. A total of 1387 images were acquired and subsequently processed. Fifteen GCPs were placed in the field, and coordinates were determined using the static GNSS method. The result is an ortho-mosaic with a GSD value of 7.86 cm, which can be used to delineate parcel boundaries and create a base map. Lidar and photogrammetry based on UAV can be effective methods in their applications in the field of real estate cadastre. These methods achieve reliable accuracy but lack completeness of the performed survey. Furthermore, the use of UAVs appears to be a suitable method when a large proportion of boundaries are visible. UAV technology is used as an alternative to speed up processes in the field of real estate cadastre. The local investigation of ownership relations and measurement of omitted objects is still necessary.
The authors of the articles [
94,
95,
96,
97,
98,
99,
100] have devoted themselves to research in the industrial sector. The article [
94] dealt with using UAVs to calculate the volume of gravel reserves. This volume was surveyed using a Leica TS06 total station and a DJI Mavic Air UAV. A total of 128 images were acquired at a height of 50 m AGL. After processing, DEM and TIN models were generated. A volume of 2686.3 m
3 was calculated using the UAV, and a volume of 2830.7 m
3 was calculated using the total station. In the article [
95], the authors wanted to create a model to generate an optimal flight plan for UAVs. This model would manage safety in the oil and gas industry. The article [
96] reviews UAV platforms and sensor systems designed for the oil industry and environmental monitoring. The described UAVs are divided into different categories, such as fixed-wing UAVs and rotary-wing UAVs. The brands and types of UAVs such as Mavinci Sirius, Trimble Gatewing X100, Aibot X6, and Matrice200 are listed. Sensors such as gas detectors, radar, lidar, and thermal infrared (IR) cameras are also listed. The brands of these sensors, Yuneec CGOETUS, Optris PI 450, FLIR Quark 640, ICI Mirage HC, Workswell GIS-320, MosaicMill Rikola, HySpex Mjolnir VS-620, Riegl VUX-1UAV, VelodyneHDL-32 E, LeddartechVu8, and others, are also listed. The authors in the article also mention the UAV application, which they describe uniquely. The research in [
97] discusses the design of a two-mode network analysis framework to quantify the spillover effects of UAV technology in various industries using U.S. Patent and Trademark Office patent citation data. In [
98], the authors studied the fog-assisted computing problem of UAV in Industry 4.0 smart factories. The simulation results show that the proposed online algorithm can achieve near-optimal task allocation with an optimality difference of no more than 7.5% compared to offline. The authors of [
99] discussed research on monitoring CO
2 gas levels in smart factories because CO
2 harms humans. According to the study, the UAV would securely transmit the sensor data to the MEC server to analyze them and make an automatic decision. The result shows of the analysis show the successful monitoring and detection of CO
2 levels in factories. The research in [
100] deals with imaging complex sites and areas in sugarcane factories in San Joaquin and the Aguila aqueduct in Spain. A DJI Mavic Pro Platinum with a 13 Mpix sensor was used for the imaging. According to the results, UAV technology is more accurate, time-saving, and suitable than standard methods. UAVs offer great potential for creating mathematical models in the oil and gas industry. Among other things, gaps and open issues were defined for this technology, which are connected to the field of the detection of oil spills at sea and oil spill detection, monitoring of gas pipelines, sensing of gas emissions, remote control of equipment, exploration of deposits and offshore oil spill detection, oil leakage detection, pipeline monitoring, gas emission sensing, remote facility inspection, and petroleum exploration.
The authors have discussed UAV applications in architecture in [
101,
102,
103,
104,
105,
106,
107]. The article [
101] focused on 3D model and texture generation using a ground-based laser scanner and UAV. The object investigated was the Torre Pelosa watchtower, located in the city of Bari, Italy. The TLS RIEGL VZ-400 scanner, with maximal scanspeed of 122,000 points/sec, was applied. An external Nikon D700 camera with 10 Mpix quality was connected to the scanner. The UAV Microgeo’s AeroMax600 with a 12 Mpix Canon S100 camera sensor was used. For indirect georeferencing, GCP was used. The image processing method was SfM. The software environment used for data processing was Riscan Pro v.1.6.1 and Agisoft PhotoScan v.1.0.4. The Resulting 3D model and 3D point cloud were generated. The authors of the article [
102] explored a concept for weighted data fusion that can enhance the 3D mapping transmitted by a UAV using a camera and a lightweight line laser scanner. The research used a UAV with a Hokuyo UTM-30LX-EW sensor and a GoPro 1080p HD HERO2. The measurements were made at the Karlsruhe Palace in Germany. From the result, an accurate 3D model was created. The images had an estimated standard deviation of 0.44 pix, and the scanner was 12 cm. The research in the article [
103] focused on using UAV for the 3D modeling of Tibetan architectural heritage. The area of interest is located in the monastery town of Gyantse (Tibet), and the surveyed building is the Auspicious Multi-Door Stupa. A DJI Phantom 4 with an integrated camera was used for the imaging. A TLS Leica ScanStation C10 laser scanner with a Canon 60D external camera was also used. A total of 55 GCPs were taken at this location and determined by the total station. After SfM processing, the resulting RMSE had a vale of 2.05 cm/1615 pix. For the TLS, the RMSE was 6 mm. A 3D model of the building was generated. The article [
104] was devoted to research on applying oblique aerial photogrammetry. A resort hotel located in Mengyuan area, China, was selected for this research. The UAV DJI Mavic 2 Pro was used and controlled using the Pix4D capture application. Data were processed in Autodesk ReCap software to create a 3D model of the hotel. The author of the article [
105] discussed architectural heritage documentation using low-cost UAVs with a fisheye lens. The measurement location was The Otag-i Humayun, Turkey. The UAV used was a 3DR Solo UAV with a 12 Mpix GoPro Hero 4 sensor. Only 28 images were captured, at a height of 50 m AGL. When five GCP were also deployed, the result was a RMSE value of 3.1 cm. As a result, the 3D point cloud, DSM, ortho-mosaic, and a 3D solid model were created. The authors of the article [
106] discussed research on monitoring and 3D documentation of architectural heritage using UAV. The equipment contained ISTI-CNR UAV with Ximea XiQ high-speed camera, and Canon EOS M (18 Mpix) was used. Agisoft Photoscan, COLMAP, and Autodesk ReCap software were used for 3D reconstruction. Accuracy was achieved within a few tenths of a millimeter. To accurately assess the architectural features of the peach trees at Washington State University’s Tukey Horticultural Orchard, both a UAV with an integrated RGB camera and a lidar system were used for reference [
107]. Photogrammetric data were acquired using three flights at a flight height of 15 m AGL, with an overlap of 80%. A DJI Phantom 4 Pro UAV with an integrated 20 MPix RGB camera was deployed. The resulting GSD reached an average value of 0.49 cm. Lidar data were acquired using a UAV on which a VLP 16 Velodyne lidar was placed. The Pix4Dmapper software was used to create a 3D point cloud, a digital surface model (DSM), a digital terrain model (DTM), and ortho-mosaics. In architecture, the use of UAV photogrammetry is especially suitable. Compared to classical methods using total stations and lidar methods, they have the advantage of almost complete coverage of the measured object. The realistic phototexture of the resulting model is also a great advantage.
6.2.2. Environmental Activities
The agricultural industry uses UAVs to monitor crops. Agricultural terraces in China were mapped by the authors using a DJI Phantom 4 Pro UAV in [
108]. For surveying agricultural fields of winter wheat, in [
109], they used a DJI Matrice 100 UAV on which an Odroid XU4 lidar sensor was placed. Other authors, in [
110], used DJI Matrice 210 UAV with a CMOS sensor in the Emilia-Romagna region in Northern Italy for mapping and monitoring in precise agriculture. The authors of [
111] used a UAV hexacopter with a Canon EOS M color camera for soil and crop mapping in a maize field. As a result, they produced a digital surface model (DSM) of the bare soil and crops and a multispectral orthopicture. UAVs are also used in agriculture to control irrigation and pests using T16 UAV [
112]. Some UAVs can perform fertilization and crop spraying [
113]. UAVs allow farmers to carry out critical measures related to irrigation, crop disease [
114], or unpredictable weather quickly, time-efficiently, and less labor-intensively. Both UAV photogrammetry and lidar methods are suitable for crop monitoring in the agricultural industry. Lidar is more suitable for crop volume estimation, and UAV photogrammetry is recommended for tracking crop development at different stages or maximizing crop productivity, which requires up-to-date, accurate, and georeferenced crop information. UAVs without any sensors are often used in agriculture. For more efficient work in the fields, UAV carriers are used for irrigation, fertilization, or pest control.
In forestry, UAVs are used to map forest structures [
63,
64] and tree heights, assess tree pruning [
60] and forest inventory [
66], or perorm various other forestry function [
115,
116]. The study [
64] used a multi-rotor GV1300 with a Velodyne Puck VLP-16 laser scanner to monitor forest structures in Eastern China. The authors of [
63] observed the forest structure. They combined a Canon 550D digital SLR camera and an Ibeo LUX laser scanner on a multi-rotor Droidworx Skyjib octocopter. Johansen et al. [
60] investigated tree crop feature extraction using a Parrot Sequoia sensor mounted on a 3DR Solo quadcopter. They assessed pruning effects on 189 trees in a lychee orchard southeast of Brisbane, Australia. In [
66], forest inventory applications were investigated using a multi-rotor VTOL UAV OctoCopter Droidworx/Microcopter AD-8 with an Ibeo LUX laser scanner. In [
115], the authors conducted a young forestry trial survey within the central North Island of New Zealand using UAV laser scanning and SfM methods. A Lidar USA Snoopy V-series system with an integrated Riegl MiniVUX-1 scanner mounted on a DJI Matrice 600 Pro UAV was used for the UAV aerial scanning. The data reconstructed by the SfM method were captured using a DJI Phantom 4 Pro UAV with an integrated 1-inch 20 MP RGB camera. A DJI Matrice 210 UAV was used for forestry applications, on which four laser scanners—RIEGL VUX-1 UAV, RIEGL miniVUX-1 UAV, HESAI Pandar40, and Velodyne Puck LITE—were mounted [
116]. The collected data were used to demonstrate the effectiveness of deriving forest inventory attributes. For forest inventory and sustainable forest management regarding the provision of accurate estimates of forest attributes, UAV photogrammetry and lidar data are equally applicable. However, the difference is visible in the estimates of the vertical structure (the range of tree crown density), when ALS provides more accurate results than photogrammetry. UAV remote sensing is a suitable tool for monitoring changes in tree structure. Different flight heights can be used, but increasing flight height reduces the accuracy of the tree crown perimeter and area. Both UAV-based methods are reliable for the accurate measurement of the position, height, and width of trees.
Applying UAVs to wild plant counts [
117,
118,
119,
120] and animals [
121,
122,
123] is a modern application. In [
117], research was devoted to detecting the number of plants from UAV images present in a plantation. The main task was to extract the number of plants found in corn and citrus fields from RGB images. Images were taken from the platform carried by the UAV. The results obtained were in the form of 6224 plants per image. The article [
118] describes the digital counting of sunflower plants from aerial images acquired by a UAV using low-height flights. According to the results, it is possible to estimate the number of plants in an image with an error of 10%. The research in article [
119] discusses counting and sizing plants in UAV images using an R-CNN mask that detects and segments individual plants. There, three potato fields, two lettuce fields in the UK, and one field in Australia were monitored. The flight was conducted at 50 m height with DJI S900 and DJI Inspire UAV with a Panasonic GH4 sensor and a DJI Zenmuse X4S sensor, respectively. The SfM processing method was used. The aim of the research [
120] was to count corn plants using images from UAVs flying at a height of 30 m AGL. The images were obtained by RGB sensors Canon PowerShot S100_5.2, Sequoia_4.9, and DJI FC6310_8.8 carried by 3DR SOLO and a DJI Phantom 4. This research was carried out on a plot of land in the Colegio de Postgraduados, Campus Montecillo. The UAV remote sensing application is a recommended method in the field of precision agriculture precisely because of its ability to detect individual plants and plantation rows with high accuracy.
6.2.3. Documentation of Historical Heritage
Research on the documentation of historical monuments has been elaborated in the articles [
124,
125,
126,
127,
128,
129,
130]. In [
124], the authors dealt with the measurement and documentation of the Church of the Holy Spirit in Liběchov, Czech Republic. The measurements were performed using a FARO Focus 3D X 330 laser scanner from the ground and supported by aerial photogrammetry. After processing, a derived document (two plan and four view drawings) and a 3D point cloud model of the church were created. In the article [
125], the authors discuss the documentation of hard-to-reach places in historical buildings using an UAV. An octo-rotor UAV with Ouster OS0, Intel RealSense D435, Garmin lidar-Lite v3, Fermion URM37, and Sony A6500 sensors were used for data acquisition. Te Church of St. Anne and St. Jacob the Great in Stará Voda and St. Maurice Church in Olomouc in the Czech Republic were monitored. The authors of the article [
126] obtained 3D reconstructions of cultural heritage using a BNU D8-1 UAV with a Canon EOS 5D Mark II digital camera and a Riegl VZ-4000 ground-based laser scanner. The Liao family temple, located in Gutian village, China, was documented. Forty-five images of the object under study were taken from a height of 100 m AGL. The article [
127] describes research on photogrammetric mapping of Mondújar Castle, located in Spain. The images were taken using a DJI Phantom 4 Pro+ with a 20 Mpix sensor. The result was a 3D model of the castle with an ortho-mosaic. The article [
128] deals with monitoring dark spots in large historical buildings using micro-UAVs. The authors of [
129] evaluated the quality of 3D models of monuments obtained using UAVs. The Chapel of the Holy Archangels George and Gabriel, located in Sarajevo, was selected for the research. The UAVs used were the DJI Phantom 4 Pro and the DJI Mavic Pro. As a result, a 3D model with a resolution of 14 mm was created. In the article [
130], the TLS and UAV technologies were compared. For this study, the site of the historical fortified tower Torre Zozzoli, located in Italy, was selected. Finally, a 3D digital reconstruction of the object was analyzed. The UAV finds its place in the documentation and 3D reconstructions of cultural heritage—historical monuments (churches, castles, historic fortified towers, and other cultural monuments) with large-scale dimensions and complex construction. Emphasis in research is placed on testing the potential accuracy with the subsequent generation of 3D models of historical monuments. The advantage of UAV remote sensing is mainly the coverage of high-lying parts of objects, the high detail, and the accuracy of models.
UAVs are also used for documentation in archaeology [
131,
132,
133,
134,
135,
136,
137]; the article [
131] presents examples, possibilities, and results from aerial photogrammetry. Using UAV, the geometrical parameters of the archaeological sites of Clunia, Puig Rom, Vilanera and Cosa in Italy were determined, and their 3D models were created. The UAVs used for data acquisition during the period 2014–2021 were DJI Phantom 1 and DJI Phantom 2 with GoPro Hero 2 sensor, DJI Phanom 3 Advanced withMAPIR NGB sensor, MAPIR RE, Yuneec Typhoon H with CGO-ET sensor, Parrot Anafi Thermal with FLIR Lepton 3.5 microbolometer sensor, DJI Mavic 2 Pro with Hasselblad 1″ sensor, MAPIR NGB, MAPIR RE, and DJI Mini 2. The authors of the article [
132] discussed the creation of ortho-mosaics using an MD4-1000 UAV with a Sony NEX-7 RGB sensor to survey a 1.13 ha archaeological area in Torreparedones (Spain). Images were taken at heights ranging from 30 m to 80 m AGL and were processed in Inpho UASMaster. The RMSE with and without the use of GCPs are described in the results. In the conclusion, the ratio between RMSE and GSD of the UAV flights is presented as equal to value 5. The authors of the article [
133] acquired archaeological documentation of six areas using a UAV designed by Gatoreye Unmanned Flying Laboratory with a lidar Scout-32 system. The measurements were carried out in Chiapas, Mexico. The article [
134] discussed research on using UAVs for monitoring, change detection, and analysis of sites where archaeological excavations have occurred. The work was carried out in 2014, 2017, and 2020 in the ancient theatre of Uzuncaburç. Three-dimensional point cloud, orthophotomosaics, DEM, and 3D models were created from images. The 3D position accuracy calculated for the control point (CP) used in the four phases of the survey ranged from 5.8 mm to 33.5 mm. The research in the article [
135] was devoted to lightweight and inexpensive UAV to be used for documenting and creating photorealistic 3D models of archaeological sites. The images were taken using a fixed-wing UAV and a DJI Phantom 4 with 12.4 Mpix and 24.1 Mpix RGB sensors (Sony A5100). The researched area was in Pakistan, where the Pakistan Memorial at Shakarparian Hills in Islamabad was monitored. The data were processed using the SfM method. A total of 336 photographs were taken from a 7 ha area, generating 17,174,268 points after processing. The texture was created with a GSD value of 1.2 cm. The article [
136] focused on a topographic survey of an archaeological site using a Foxtech UAVocopter with a lidar Yellowscan Mapper sensor. The site selected for this study is located in the northern Sardinian region of Usini (Italy). As a result, a DTM was obtained and compared with the DEM. The authors of the article [
137] discussed modern geomatic techniques for detecting and investigating emerging archaeological structures on the northwestern slope of Etna in Sicily. The survey was carried out using a DJI Phantom 3 Advanced with 12 Mpix camera. The flight was carried out at a height of 30 m AGL, and the flight was controlled using the Pix4D capture mobile application. Using GCP, a 3D model was georeferenced in QGIS software. The result was an ortho-mosaic and a DSM. The UAV application has its use in the field of cultural and industrial heritage. Archeology is a field in which UAVs are also closely connected and used primarily in the field of the geometrical documentation of archaeological sites (excavations), the creation of high-resolution digital models and 3D models, the monitoring of the crack patterns of historic structures, and 3D reconstruction of scenes.
6.2.4. Natural Hazards and Geohazards
UAV technology is also used to track and monitor geohazards. The authors of [
58,
138] monitored the evolution of erosion, morphological changes in debris cones, and the dynamics of movement of rock blocks and debris cones between stages of measurement in the high mountain environment in the High Tatras. There, the authors used a UAV DJI Phantom 4 equipped with a digital camera with a resolution of 5472 × 3648 pixels. The author of [
139] monitored seismic faults in the 2021 Maduo earthquake in China based on UAV-lidar technology, InSAR, and field investigation. The study [
140] mapped landslides after the 2017 earthquake using high-resolution UAV imagery in the Jiuzhaigou area in Zhangzha City, Jiuzhaigou County, in northwestern Sichuan Province, China. A few days after the earthquake, a Huaao X-UAV flight was conducted, and a high-resolution DEM was derived from the acquired data. The authors of [
141] focused on assessing and analyzing rock falls along a national highway in Phitsanulok Province, Thailand. The images collected by UAVs were transformed into digital topographic contours, and a typical cross-section was created using a digital elevation model (DEM). Rockfall boulders were also addressed by the authors of [
142], who used a DJI Phantom 4 Pro quadcopter in their study. From a flight altitude of 75 m AGL, they acquired 89 images with a GSD of 3.5 cm, which resulted in the creation of a Digital Surface Model (DSM) and a map of geohazards. When monitoring geohazards, the goal is usually to create a DSM or DTM, for which the SfM method is more suitable. Using the SfM method, we can monitor the development of erosion, morphological changes in objects, and the dynamics of rock movement or landslides. However, an alternative is also the use of LiDAR technology, which can be used to monitor seismic faults during an earthquake.
Monitoring of changes in volcano morphology using UAV is involved in the works [
143,
144]. Gailler et al. [
143] investigated magnetic field measurements using UAVs in the central part of Chaîne des Puys and at the Petit Puy de Dôme volcano. Derrien et al. [
144] monitored the deformation of the summit of Piton de la Fournaise volcano and used ortho-images to fit structural and deformation maps of the study area. The unstable blocks of Sciara del Fuoco volcano on the island of Stromboli, Italy, were investigated using a Saturn UAV and a Canon IXUS 240 camera in [
145]. In cooperation with UAVs and ground-based laser scanning, the area of the volcano was monitored by the author [
146]. In the Nirano Nature Reserve in Emilia Romagna, Italy, the author acquired more than 350 images using a quadcopter and Canon Power Shot S110 camera. Using images, he produced point clouds and georeferenced ortho-images and DEM, which were used to study volcanic mud complexes. In the work [
147], the authors mapped the volcano’s crater rim and volcanic dome. In 2012, lidar data were acquired using a LiteMapper 5600 system installed on a Cessna 402B aircraft. Data were obtained at a flight height of 820 m AGL, with 40% lateral and 60% forward overlap, at a density of 5 points/m
2. Two years later, the same area was captured using a fixed-wing UAV with Canon PowerShot S100 camera. As a result, 328 photographs with a resolution of 3000 × 4000 pixels were obtained. The authors used the integration of the UAV and satellite imagery at a volcano in East Java, Indonesia [
148]. They used a DJI Mavic Pro UAV with a built-in RGB camera equipped with a 1/2.3″ CMOS sensor to generate the DSM and ortho-mosaics. Reference [
149] used an RC high-wing UAV equipped with a digital camera for mapping during a volcanic eruption, which produced a DEM that was effectively applied to assess the post-disaster situation. In the field of volcano monitoring, the SfM photogrammetric method led to the representation of high-resolution 3D terrain models and allowed the acquisition of high-resolution digital elevation models or accurate deformation maps of the volcano. Thanks to the flight at low altitudes, magnetic anomalies and changes in the volcanic context were displayed well, and morphological information could also be derived. LiDAR technology is equally effective in this area of monitoring, but the cost of equipment and the risk of damage to expensive devices is significantly greater.
The authors of [
150] used GEO 2 UAV equipped with a SONY A6000 camera to monitor landslides. The landslide area was observed from a flight height of 100 m, with 80% longitudinal and 60% lateral overlap, resulting in 291 images. Kyriou et al. [
151] monitored, using UAV technology, an active landslide located in western Greece and generated highly detailed ortho-mosaics and digital surface models (DSM) using the SfM photogrammetric method. Their study used a DJI UAV Matrice 600 equipped with an X5 camera that captures photos with a resolution of 4608 × 3456 pixels and a DJI UAV Phantom 4 with a camera set to with an image resolution of 4000 × 3000 pixels. The data were collected from a flight height of 110 m AGL, with 90% longitudinal and 75% lateral overlap. The authors of [
152] used an UAV to document a steep landslide triggered by rainfall and flooding on both sides of the Rječina River valley near Rijeka, Croatia. The authors of [
153] attempted to perform landslide detection and prediction using a SibGIS UAS hexacopter equipped with two cameras. Peppa et al. [
154] used a Quest 300 mini fixed-wing UAV with a Panasonic Lumix DMC-LX5 camera at a flight height of 90 m AGL to create a digital elevation model (DEM) to demonstrate the movement and changes in the landslide. Rossi et al. [
155] monitored geohazards and landslides in Tuscany using a multicopter UAV named Saturn, which was developed at the University of Florence. In their publication, Rau et al. [
156] used a fixed-wing UAV with a Canon EOS 450D digital camera to map landslides caused by rainfall. A UAV can provide observations with high spatio-temporal resolution and enable operational monitoring of landslides and provide analyses of surface deformation. The SfM method is very often used to monitor and map landslides. This method is suitable for creating ortho-mosaic, DSM and DEM, which are most often generated during landslides. Using this method, it is also possible to detect and predict landslides.
UAVs are also used to check the stability of slopes. The authors of [
157] addressed the instability of the Elva valley road in northern Italy. They performed 19 flights in this area using a DJI Phantom 4 with an FC6310 camera. They acquired approximately 1700 images, from which they produced digital surface models (DSM) at three different scales: a large-scale DSM of the entire road, a medium-scale DSM to assess parts of the slope, and a small-scale DSM to assess individual discontinuities. The publication [
158] used an AS350 helicopter with a Leica ALS80-HP airborne lidar system and a DJI Phantom 4 RTK UAV with an FC6310 camera (1″ CMOS) to monitor slope disturbance in the Jiuzhaigou area. Point clouds using lidar were acquired from a flight height of 1500–3000 m AGL, and 377 high-resolution images were acquired using the DJI UAV Phantom 4 RTK, where a dense point cloud was made. Car et al. [
159] monitored a landslide that occurred on the R201 railway line Záprešič-Čakovec using a DJI Phantom 2 Vison+ and produced a digital terrain model. The article [
160] used the UAV to acquire 3D orthographic images of the slopes and used them to assess slope stability and quantitative hazard assessment at sites in Croatia. Junaid et al. in [
161] monitored the stability of a rocky slope along a highway in Pengerang, Johor, Malaysia. A survey using UAV technology was carried out with a DJI Phantom 4 PRO + V2.0 from a flight height of 5–30 m with an image overlap of more than 60%. From 246 acquired images, 3D point clouds and an accurate 3D surface model (DSM) were made. The authors of [
162] analyzed the stability of a slope with a block rock massif using the lidar Leica ALS80-HP and UAV Phantom 4. The authors of [
163] deployed UAV in the mining area. They created a digital elevation model (DEM) for the area in the northwestern part of India, in the city of Chittorgarh. Where it is not possible to obtain direct contact measurements due to terrain or safety restrictions, a UAV equipped with a LiDAR, or a digital camera, is used to check the stability of slopes. Slope stability control should serve to mitigate economic losses, property damage, environmental degradation, and severe injuries or deaths. Both methods are effective for monitoring slope stability, but the authors more often use UAV photogrammetry. The advantage of photogrammetric methods is their low purchase price and the high density of point clouds.
Geology is another area where UAV technology is frequently used. The authors [
164] used photogrammetric data outputs to create a 3D model of the geological structure in the Lehôtka pod Brehmi perlite deposit in the Žiar nad Hronom district using a Phantom 2 Vision+ UAV and 14 Megapixel FC200 camera. From a flight height of 35 m AGL, 58 images were made and georeferenced using 18 GCP. The study [
165] used an AustroDrones X18 multicopter equipped with a Sony Alpha 7R camera for engineering geology applications in the Saigesbach basin, Sellrain valley, in the Alps of Austria. In total, 640 images were acquired in two flights. They deploy also Multiplex Mentor fixed-wing UAV with a Sony NEX5 camera that collected 4000 aerial images during four flights. The UAV images were processed in Agisoft Photoscan. The resulting ortho-mosaics reached a GSD of 0.02 m when imaging the valley and 0.08 when imaging the basin. For DSM, the GSD value was 0.05 m when imaging the valley and 0.20 m when imaging the basin. Tziavou et al. [
166] carried out structural geological mapping of a sedimentary outcrop in South Ayrshire (Scotland). They used a UX5 HP fixed wing and a TRIMBLE ZX5 hexacopter, which produced the resulting ortho-mosaics of the study area. High-resolution photographs that can be transformed into digital models of the outcrops [
167,
168] are most suitable for geological purposes. The authors of [
168] tracked outcrops within Dinosaur Provincial Park using a senseFly eBee fixed-wing UAV with an 18.2 megapixel Sony WX220 digital camera and created 3D models using Pix4Dmapper software. Tracking dikes and outcrops making point clouds and 3D models using data collected by the UAV were also addressed in [
169]. The authors of [
170] analyzed the geological hazard in Stara Baška on the island of Krk, Croatia, using a DJI Phantom 4 Professional UAV. In the field of geology, the SfM method is most often used to create a 3D model of a geological structure, for engineering geological applications and geological mapping, but also for the prediction of geological hazards. The SfM method obtains high-resolution photographs, from which 3D digital models or ortho-mosaics are subsequently generated. In the field of geology, the SfM photogrammetric method is currently the most effective and popular.
The use of UAVs has also opened new frontiers of observation in hydrology. The authors of [
171,
172] have used UAVs to observe stream flows. They engage hydrological modeling through the DEM of stream bathymetry with water level estimation. The authors of [
173,
174,
175] have mounted miniature lidar systems on UAVs to estimate water level and bathymetry. They achieved a measurement accuracy of several centimeters. In reference [
176], the author used a UAV to monitor the flow restoration of the Hostivický Brook in Prague, Czech Republic, using a DJI Inspire 1 Pro platform with a DJI Zenmuse X5 camera, which produces images with a resolution of 4608 × 3456 pixels. The acquired data were used to generate a dense point cloud, a digital surface model (DSM), and an ortho-mosaic. In the publication [
177], the authors used a UAV multi-copter carrying a Sony alpha 7R camera to monitor and reconstruct the topography of the Jyoge River in Hiroshima Prefecture, Japan. From a flight height of 100 m, with a forward overlap of 90%, a lateral overlap of 50–60%, and a flight speed of 4 m/s, they acquired a series of aerial images, which they processed in Pix4D Mapper to produce an ortho-mosaic and a DSM of the river channel morphology. In hydrology, UAV photogrammetry is used in the same way as lidar technology is used to estimate the water level or reconstruct the topography of the river. The use of lidar is based on information about signal intensity. From the water surface, the signal reflectivity is very low; therefore, the resulting point cloud models drop out, and it is very easy to detect the boundary between water and land. With UAV photogrammetry in hydrology, complete surface images are captured from the camera, and a DSM or ortho-mosaic is then created. The choice of method depends on the observed territory, finances, or the resulting output.
6.2.5. Non-Surveying Applications
The advantage of using UAV technology to make photographs [
178,
179,
180], video recordings [
181,
182], or cinematography [
183,
184] consists in the possibility of exploring and capturing territories and areas with high flexibility and range while producing long continuous shots at a reasonable cost. Imaging ranges are from a few centimeters to more than 100 m. Flener et al. in [
178] used a Maxi-Joker 3DD minicopter with a 12.3 megapixel Nikon D5000 camera to create continuous, high-resolution digital terrain models (DTM) of river channels and their floodplains. The authors of [
179] used a DJI Phantom 3 Advanced UAV with a SONY EXMOR 1/23″ sensor to map tree heights and tree canopies. Zhang et al. [
180] created 3D models of buildings based on images acquired by a QingTing-5S quadcopter. The work [
182] produced a video preview of a peatland east of Ottawa, ON, Canada, using a Canon PowerShot G11 camera mounted on a Hirobo SDX Radio Control helicopter. For the purpose of taking photos and video recordings, the best option is to use UAV photogrammetry. This method meets all requirements related to the detail and quality of the display of the Earth’s surface and various objects and phenomena on it.
UAV technologies are now being used in disaster management, rescue operations, and public safety surveillance. Using UAVs, large-scale operations can also be safely carried out with higher efficiency. Rescue forces can avoid danger and save a lot of time and costs since UAVs offer real-time imagery of critical locations and, by thermal detection, reveal movement even in dense vegetation [
185]. The authors used a High One Drone UAV quadcopter with The Flir Vue Pro 336 camera. UAV technology can speed up decision-making and refine the disaster site’s localization. The issue of the use of UAVs in rescue operations is also addressed by Sun et al. [
186], Zimroz et al. [
187], and Lygouras et al. [
188]. For search-and-rescue purposes, they used the [
186] X-UAV Talon 4, on which a GoPro HERO camera was installed. The GoPro HERO 4 camera was set to video mode with a resolution of 1920 × 1080 pixels. As a result, 2200 photographs were segmented, and an ortho-mosaic model and point cloud were produced. Zimroz et al. [
187] discussed the applications of UAVs in search-and-rescue operations in an underground mine. Their study used a DJI Mavic Mini UAV, which was manually controlled and equipped with a microphone to detect humans. I addition, in [
188], the authors used a six-rotor Rolfer UAV with a 1920 × 1080 HD GoPro camera to detect humans. For fully autonomous navigation of the UAV and automatic detection of humans in danger, the embedded graphics processing unit platform Nvidia Jetson TX1 was used. The authors of [
189] used the Talon and Liu X-UAV platform for search-and-rescue purposes. The authors of [
190] addressed emergency recognition in the wilderness using the UAV with a Parrot Sequoia+ multispectral camera in Biatorbágy, Hungary. Cho et al. [
191] used UAVs in maritime search-and-rescue operations. In the field of search and rescue, we recommend the use of lidar technology in areas with dense vegetation or in the wilderness. However, in open space, a better method is UAV photogrammetry, which, using a camera or microphone, can detect swimmers in open water and can be effective in emergency search-and-rescue operations.
Currently, UAV technology is also used by military units. The authors of [
192] used UAVs for the surveillance of geographic regions and to monitor them for security reasons. UAVs are used for strategic and tactical needs [
193,
194,
195], simulations [
196], surveys [
197], and espionage, without the military risking any human lives. UAVs are used in military conflicts to transport and drop bombs and missiles. So-called flying munitions UAVs (also known as kamikaze UAVs), which serve as weapons, are also increasingly frequently used. UAVs are also suitable for land mine clearance when they use hyperspectral imaging technology to quickly identify landmines buried in the ground. With the expansion of UAV technology, their misuse for illegal activities such as jamming, information leakage, or espionage is increasingly occurring. UAVs are also directly used in military operations, where they can be damaged or destroyed; therefore, we recommend using the cheapest possible camera sensor for these purposes.
UAVs are also used to inspect power lines and pipelines [
198,
199,
200,
201,
202,
203]. The article [
198] used a DJI Phantom 4 PRO V2.0 UAV to detect abnormal vibration of dampers on portable power lines. During flight, a distance of 10 m from power lines and transmission towers was maintained. In the article [
199], the authors discussed the application of UAV technology to inspect power lines that were imaged at a low height. A 16.5 km long section was selected for this research in Yichang, China. A fixed-wing UAV with a Nikon D810 digital camera was used to acquire images. In total, 1066 images were acquired, with a GSD accuracy of 3.5 cm. The authors in the article [
200] described a new sensor package designed for micro- or mini-UAVs. This package can include a laser scanner, camera, IMU, and other sensors that can vary according to the requirement and application. Hokuyo (30LX) and Sick LD-MRS-400001 on the md4-1000 UAV were also investigated. The authors of [
201] dealt with the design of a safe flight approach (SFA) of UAVs in controlling power lines. The authors of the article [
202] discussed the development of a platform that provides control of UAVs when inspecting overhead transmission lines. This platform has already been applied in Tianjin, China, where it achieved excellent results. The article [
203] proposes a complementary attitude data system based on augmented reality tags (AR Tags) to enhance the reliability of the UAV flight-attitude-determination system, making the results positive. The positional accuracy of the UAV was increased. The results of these studies confirm that UAV lidar technology can locate obstacles in the power line corridor with high accuracy (±0.5 m). The testing of this UAV confirmed its effectiveness in the inspection of electrical lines and the very control of the distribution of electrical lines to ensure the safety of operation.
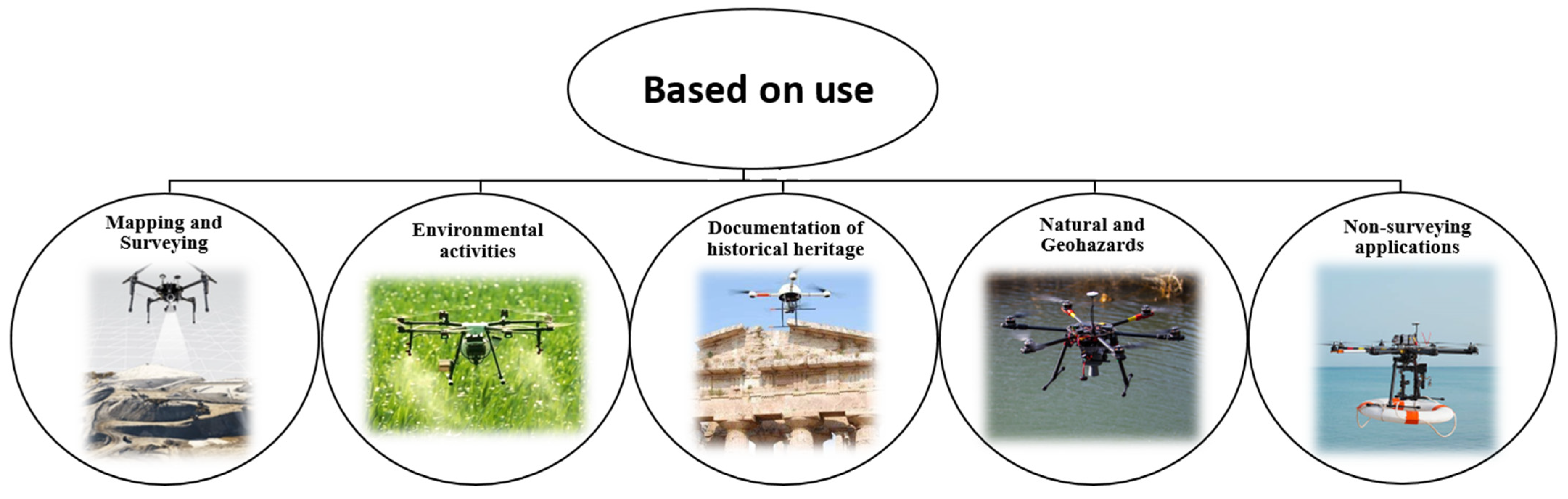
UAV technology is currently used in everyday life in almost every scientific, technical, and non-technical discipline. UAVs have revolutionized every industry and are also used in a wide range of applications for civil, commercial, and military purposes. UAVs are most commonly applied in the sectors displayed in
Figure 3 and summarized in
Table 9.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}