
A Review on the Prospects of Mobile Manipulators for Smart Maintenance of Railway Track
 , , ,
, , ,
Abstract
:1. Introduction
2. Current Technologies for Railway Track Maintenance
2.1. Push-Trolley
2.2. Road–Rail Vehicle
2.3. Train-Borne System
2.4. Specialist Train
3. Robotic Technologies Used in Railway Track Inspection and Maintenance
3.1. Robotic Inspection Technologies in Railway
3.1.1. Track Inspection
3.1.2. Tunnel and Bridge Inspection
3.2. Robotic Repair Technology in Railway
4. Robotic Maintenance Technology in Other Industries
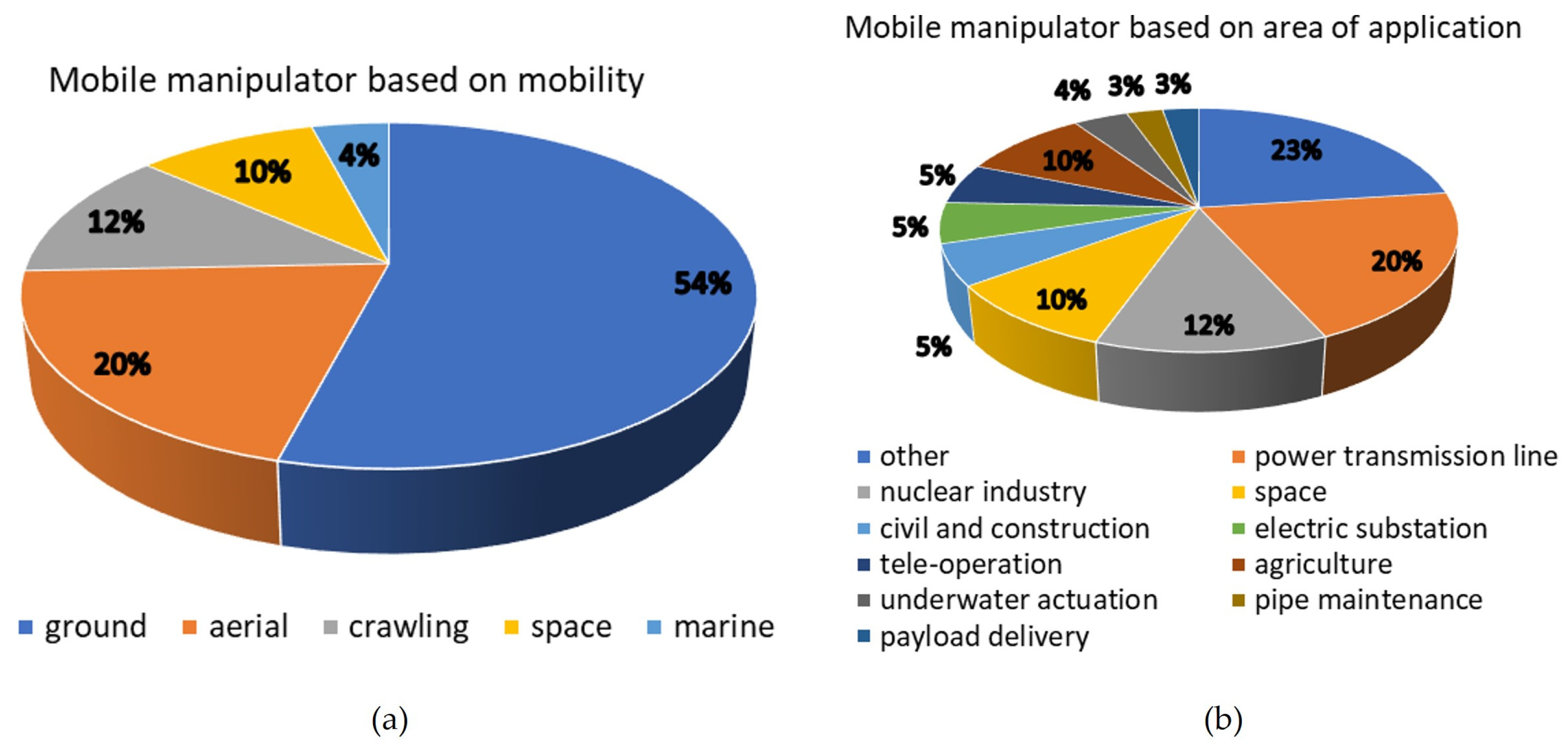
4.1. Overview of Mobile Manipulator Based on Mobility and Applicability
4.2. Mobile Manipulators for Inspection and Repair Tasks
4.2.1. Maintenance in High-Voltage Transmission Line and Substation

4.2.2. Maintenance in Nuclear Power Plants & Hazardous Places

4.2.3. Maintenance in Aerospace
4.2.4. Maintenance in Civil and Construction Sites
4.2.5. Application of Mobile Manipulator in Agriculture
4.2.6. Other Applications of Mobile Manipulators
5. Case Study
6. Benefits of Using a Mobile Manipulator for Railway Track Maintenance
- (a)
- Environmentally friendly and sustainability
- (b)
- Efficiency and productivity
- (c)
- Financial impact
- (d)
- Asset utilization
- (e)
- Safety of workforce
- (f)
- Connectivity
7. Challenges and Requirements
7.1. Challenges for a Mobile Manipulator for Track Maintenance
- (a)
- Track structure and access points—Railway track surface condition is different than road or industrial setup. The railway track is an uneven terrain. Moreover, the workspace for the robot is limited inside the tunnel or bridge. Additionally, as the mobile manipulator cannot stay on track after finishing the tasks, it will need access points to use the track. Railway infrastructure such as platform, trackside furniture, overhead line equipment (OLE), and leftover material may cause navigational problems for autonomous robots [161].
- (b)
- Communication—Other challenges come from the communication perspective. Communication between the control or operation center and the mobile manipulator is required. With the advancement of teleoperation, human skills can be transferred to robots. However, stable communication between the human operator and the robot is a must in this scenario. Moreover, in the case of a fleet of robots, communication among mobile manipulators is required for safety and task collaboration. As railway track passes through mountains, forests, or remote locations, there is a lack of signal or weak signal along the track.
- (c)
- Location awareness—Localization of the robot is essential for defect location referencing and for re-locating the defect for repair tasks. Due to the remoteness of the track, overhead line equipment (OLE), nearby buildings, or dense forest interfere with the GPS signals. Additionally, tunnels are GPS-denied areas. Hence, in many places, the GPS positioning accuracy will be very low, or there will be no GPS signal.
- (d)
- Power—Most of the mobile manipulators are battery-powered, which is convenient. The mobile manipulator will need powerful batteries to perform many repair tasks, such as welding, grinding, drilling, and lifting heavy payloads. However, powerful batteries will increase the weight of the mobile robot and reduce the usable space on the robot. Although internal combustion (IC) engines can provide power instead of batteries, this is not feasible from an environmental perspective. Thus, power capacity and management are still challenging for mobile manipulators.
- (e)
- Data budget and management—The mobile manipulator will record sensor output for inspection. Depending on the control architecture, the mobile manipulator will analyze those data in real-time or save those for future usage. The data budget analyzes and estimates the requirements of data storage capacity and computational cost based on the sensor output. On the other hand, data management determines which data to store for future usage, the computation requirement for onboard data processing, and the data transfer process between the robot and the primary control system. As a portable machine, the mobile manipulator has limitations in processing large quantities of data, while the lack of internet connectivity in many places along the railway track will hinder the data transfer process.
7.2. Requirements of a Mobile Manipulator for Track Maintenance
- (a)
- Reduced track possession—Track possession is important to maintain the safety of the maintenance people. Usually, total possession time is the sum of 3 times: time from last train to start of work, work in progress time, and time from end of work to the first train. In the UK, the average time for the last train to start work was around 50 min and 20 min for AC-electrified and non-electrified routes, respectively [162]. Moreover, the end of work to the first train passing time was calculated as 25 min for AC-electrified routes and 100 min for non-electrified routes. Additionally, a minimum safety distance of 2 m is maintained between the staff and train in case of parallel tracks [162]. To ensure financial benefits and maximize asset utilization, mobile manipulators should have reduced track possession.
- (b)
- Safety and security—With the advancement of Industry 5.0, the collaboration between robots and humans is increasing gradually. Safety aspects of a robotic system should integrate both the autonomous and collaboration modes. Robotic systems should be capable of identifying static objects, dynamic objects, humans, or animals visible inside the workspace. Robotic systems should avoid any collision with objects. Lack of safety measures in robotic systems can cause fatalities in the workplace [163]. Security in a robotic system ensures that the environment does not create any harm to the robot or robot operation. Cybersecurity measures such as the security layer and authenticity of data communication are required to minimize the risk of hijacking or cyberattacks. Identifying the hazard; assuring safe design, safe operation, hazardous failure management; and verifying action are important tasks for any autonomous system working in complex environments [164].
- (c)
- Design for maintenance—Design for maintenance is a guideline to enhance the maintainability, reliability, and supportability of a product to ensure maintenance of the product at less expense, less time, and less effort [165]. The mobile manipulator used for track maintenance will require regular maintenance such as sensor calibration, battery condition monitoring, links, and joint integrity. Easy maintainability will keep the robot ready for the next repair job and extend the life of the robot. Design for maintenance is also important to achieve overall cost-effectiveness [165].
- (d)
- Task verification capability—finally, the mobile manipulator should be equipped with a task verification system. This will certify that the successful task completion is compliant with the railway’s standards. This verification system will also capture any repair faults and save trains from any catastrophic accidents.
- (e)
- Using intelligence: Robots are becoming smarter gradually in terms of perception, object detection and control system with the usage of machine learning (ML), deep learning (DL) and artificial intelligence (AI). Although ML is used in many inspection tasks [46,51,52,53,54,55,56], more research is needed to ensure smart and intelligent robotic maintenance. Usage of ML, DL, AI can improve the efficiency of perception to differentiate between railway and foreign objects, detect humans, and identify faults. Moreover, robotic intelligence can improve the decision-making ability of control systems. Hence, the usage of robotic or machine intelligence is required in the future robots.
- (f)
- Legal and regulatory requirements: Railway is a highly regulated industry. As railway carries more people and freight than other mass transportation systems, policy makers give maximum priority to safety. For example, RSSB [166] and Network Rail [167] develop, modify, and maintain standards in all aspects including the detail design of rolling stock, railway infrastructures, safety standards, driving and controlling methods, maintenance procedures, engineering acceptance, etc.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Giordano, V. Robotic Non-Contact Rail Inspection Feasibility Study. Masters’s Thesis, Cranfield University, Bedford, UK, 2018. [Google Scholar]
- Intelligent Innovative Smart Maintenance of Assets by IntegRated Technologies|IN2SMART Project|Fact Sheet|H2020|CORDIS|European Commission. Available online: https://cordis.europa.eu/project/id/730569 (accessed on 23 May 2022).
- Song, Y.; Wang, Z.; Liu, Z.; Wang, R. A Spatial Coupling Model to Study Dynamic Performance of Pantograph-Catenary with Vehicle-Track Excitation. Mech. Syst. Signal Process. 2021, 151, 107336. [Google Scholar] [CrossRef]
- Azzoug, A.; Kaewunruen, S. RideComfort: A Development of Crowdsourcing Smartphones in Measuring Train Ride Quality. Front. Built Environ. 2017, 3, 3. [Google Scholar] [CrossRef]
- Vithanage, R.; Harrison, C.; DeSilva, A. Importance and Applications of Robotic and Autonomous Systems (RAS) in Railway Maintenance Sector: A Review. Computers 2019, 8, 56. [Google Scholar] [CrossRef]
- HS2 Costs Could Rise to £106bn, Government Review Says 2020. Available online: https://www.therailwayhub.co.uk/9839/hs2-costs-could-rise-to-106bn-government-review-says/ (accessed on 10 February 2023).
- Transport-Watch. Capital for Track 2008; Transport-Watch: Northampton, UK, 2008. [Google Scholar]
- Landgraf, M.; Enzi, M. Smart Data for a Pro-Active Railway Asset Management. In Proceedings of the 7th Transport Research Arena TRA 2018, Vienna, Austria, 16–19 April 2018. [Google Scholar]
- Kahn, M.E.; Roth, B. The Near-Minimum-Time Control of Open-Loop Articulated Kinematic Chains. J. Dyn. Syst. Meas. Control. Trans. ASME 1971, 93, 164–172. [Google Scholar] [CrossRef]
- History of Robots and Robotics|Origins of Robots. Available online: https://robotnik.eu/history-of-robots-and-robotics/ (accessed on 16 November 2022).
- The Mobile Robots at LAAS. Available online: https://homepages.laas.fr/matthieu/robots/h2bis.shtml (accessed on 16 November 2022).
- Kitamura, A.; Namekawa, T.; Hiramatsu, K.; Sankai, Y. Operating Manipulator Arm by Robot Suit HAL for Remote In-Cell Equipment Maintenance. Nucl. Technol. 2013, 184, 310–319. [Google Scholar] [CrossRef]
- Menendez, E.; Victores, J.G.; Montero, R.; Martínez, S.; Balaguer, C. Tunnel Structural Inspection and Assessment Using an Autonomous Robotic System. Autom. Constr. 2018, 87, 117–126. [Google Scholar] [CrossRef]
- Cao, L.; Guo, R.; Wu, P.; Su, M.; Liu, X.; Zhang, F.; Guan, Y. Screwing Manipulation on Power Transmission Lines with a Robotic System. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1294–1299. [Google Scholar]
- Zeb, J.; Qaiser, N.; Iqbal, N.; Ahmed, N. Kinematics Modeling of the Arm of a Radiation Protection Assistant Robot. In Proceedings of the 2005 Pakistan Section Multitopic Conference, Karachi, Pakistan, 24–25 December 2005; pp. 1–6. [Google Scholar]
- Lorenc, S.J.; Handlon, B.E.; Bernold, L.E. Development of a Robotic Bridge Maintenance System. Autom. Constr. 2000, 9, 251–258. [Google Scholar] [CrossRef]
- Martin, J.; Ansuategi, A.; Maurtua, I.; Gutierrez, A.; Obregón, D.; Casquero, O.; Marcos, M. A Generic ROS-Based Control Architecture for Pest Inspection and Treatment in Greenhouses Using a Mobile Manipulator. IEEE Access 2021, 9, 94981–94995. [Google Scholar] [CrossRef]
- Hu, R.; Iturralde, K.; Linner, T.; Zhao, C.; Pan, W.; Pracucci, A.; Bock, T. A Simple Framework for the Cost–Benefit Analysis of Single-Task Construction Robots Based on a Case Study of a Cable-Driven Facade Installation Robot. Buildings 2020, 11, 8. [Google Scholar] [CrossRef]
- Brosque, C.; Fischer, M. Safety, Quality, Schedule, and Cost Impacts of Ten Construction Robots. Constr. Robot 2022, 6, 163–186. [Google Scholar] [CrossRef]
- Chen, G.; Liang, Q.; Zhong, W.; Gao, X.; Cui, F. Homography-Based Measurement of Bridge Vibration Using UAV and DIC Method. Measurement 2021, 170, 108683. [Google Scholar] [CrossRef]
- Stypułkowski, K.; Gołda, P.; Lewczuk, K.; Tomaszewska, J. Monitoring System for Railway Infrastructure Elements Based on Thermal Imaging Analysis. Sensors 2021, 21, 3819. [Google Scholar] [CrossRef]
- Railway-News Railway Inspection Robot Takes on Maintenance Challenges. Available online: https://railway-news.com/railway-inspection-robot-takes-on-maintenance-challenges/ (accessed on 3 November 2022).
- Hisa, T.; Kanaya, M.; Sakai, M.; Hamaoka, K. Rail and Contact Line Inspection Technology for Safe and Reliable Railway Traffic. Hitachi Rev. 2012, 61, 325. [Google Scholar]
- Ganesh, V.; Mm, M. Automotive Crack Detection for Railway Track Using Ultrasonic Sensorz. Int. J. Eng. Technol. Comput. Res. (IJETCR) 2016, 4, 34–37. [Google Scholar]
- Li, Z.; He, Q. Predicting Failure Times of Railcar Wheels and Trucks by Using Wayside Detector Signals. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1113–1118. [Google Scholar]
- Rajamäki, J.; Vippola, M.; Nurmikolu, A.; Viitala, T. Limitations of Eddy Current Inspection in Railway Rail Evaluation. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 121–129. [Google Scholar] [CrossRef]
- A New Electromagnetic Acoustic Transducer (EMAT) Design for Operation on Rail—ScienceDirect. Available online: https://www.sciencedirect.com/science/article/pii/S0963869514000413?via%3Dihub (accessed on 13 February 2023).
- Wang, H.; Silvast, M.; Markine, V.; Wiljanen, B. Analysis of the Dynamic Wheel Loads in Railway Transition Zones Considering the Moisture Condition of the Ballast and Subballast. Appl. Sci. 2017, 7, 1208. [Google Scholar] [CrossRef]
- Wang, H.; Chang, L.; Markine, V. Structural Health Monitoring of Railway Transition Zones Using Satellite Radar Data. Sensors 2018, 18, 413. [Google Scholar] [CrossRef]
- Trolleys & Vehicles Archives. Available online: https://permaquip.co.uk/shop/product-category/trolleys-vehicles/ (accessed on 28 October 2022).
- Majstorović, I.; Ahac, M.; Lakusic, S. Track Gauge Monitoring Scope Optimization on Small Urban Railway Systems. In Proceedings of the 6th International Conference on Road and Rail Infrastructure CETRA 2020, Zagreb, Croatia, 20–21 May 2020. [Google Scholar]
- Track Geometry Trolley. Available online: https://www.pandrol.com/product/track-geometry-trolley/ (accessed on 28 October 2022).
- AS 7502:2016; Road Rail Vahicles. Rail Industry Safety and Standard Board: Brisbane, QLD, Australia, 2016.
- RIS-1530-PLT; Rail Industry Standard for Engineering Acceptance of On-Track Plant and Associated Equipment. RSSB: London, UK, 2014.
- Unimog U 219—U 535: Road-Rail—Mercedes-Benz Trucks—Trucks You Can Trust. Available online: https://www.mercedes-benz-trucks.com/en_GB/models/unimog-implement-carrier/applications/road-rail.html (accessed on 28 October 2022).
- Asset Management & Scanning—Aquarius Railroad Technologies. Available online: https://www.aquariusrail.com/products/scan-r2r4x4/ (accessed on 12 January 2023).
- Inspection & Transport Road-Rail Vehicle Runner Wizard—V2R. Available online: https://geismar.com/products/inspection-transport-road-rail-vehicle-v2r-runner-wizard/?lang=en (accessed on 28 October 2022).
- Yang, Y.B.; Wang, Z.-L.; Shi, K.; Xu, H.; Wu, Y.T. State-of-the-Art of Vehicle-Based Methods for Detecting Various Properties of Highway Bridges and Railway Tracks. Int. J. Struct. Stab. Dyn. 2020, 20, 1793–6764. [Google Scholar] [CrossRef]
- Our Solution. Available online: https://www.machineswithvision.com/oursolution (accessed on 31 October 2022).
- RILA® 3.0. Available online: https://www.fugro.com/about-fugro/our-expertise/innovations/rila (accessed on 31 October 2022).
- New Measurement Train (NMT)—Network Rail. Available online: https://www.networkrail.co.uk/running-the-railway/looking-after-the-railway/our-fleet-machines-and-vehicles/new-measurement-train-nmt/ (accessed on 17 June 2020).
- Britain’s First ‘Workshop on Wheels’ Set to Revolutionise Railway Maintenance. Available online: https://www.networkrailmediacentre.co.uk/news/britains-first-workshop-on-wheels-set-to-revolutionise-railway-maintenance (accessed on 24 May 2022).
- Erridge, C. How Cutting-Edge Track Technology Is Reducing Delays for Passengers. Available online: https://www.networkrail.co.uk/stories/how-cutting-edge-track-technology-is-reducing-delays-for-passengers/ (accessed on 13 February 2023).
- Yucel, M.; Ozturk, N. Real-Time Monitoring of Railroad Track Tension Using a Fiber Bragg Grating-Based Strain Sensor. Instrum. Sci. Technol. 2017, 46, 519–533. [Google Scholar] [CrossRef]
- Trivedi, M.M.; Ng, K.C.; Lassiter, N.; Capella, R. New Generation of Multirobot Systems. In Proceedings of the SMC’98 Conference Proceedings, 1998 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No.98CH36218), San Diego, CA, USA, 14 October 1998; IEEE: San Diego, CA, USA, 1998; Volume 4, pp. 3342–3346. [Google Scholar]
- Ranganathan, P.; Olson, E. Automated Safety Inspection of Grade Crossings. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 2149–2154. [Google Scholar]
- Santur, Y.; Karakose, M.; Akin, E. A New Rail Inspection Method Based on Deep Learning Using Laser Cameras. In Proceedings of the 2017 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017; pp. 1–6. [Google Scholar]
- AutoScan—Rail Inspection by Autonomous Systems. Available online: https://cordis.europa.eu/project/id/720506 (accessed on 25 September 2022).
- Mazzeo, P.L.; Nitti, M.; Stella, E.; Distante, A. Visual Recognition of Fastening Bolts for Railroad Maintenance. Pattern Recognit. Lett. 2004, 25, 669–677. [Google Scholar] [CrossRef]
- Singh, M.; Singh, S.; Jaiswal, J.; Hempshall, J. Autonomous Rail Track Inspection Using Vision Based System. In Proceedings of the 2006 IEEE International Conference on Computational Intelligence for Homeland Security and Personal Safety, Alexandria, VI, USA, 16–17 October 2006; pp. 56–59. [Google Scholar]
- Marino, F.; Distante, A.; Mazzeo, P.L.; Stella, E. A Real-Time Visual Inspection System for Railway Maintenance: Automatic Hexagonal-Headed Bolts Detection. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 418–428. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, J.; Tao, W.; Zhao, H. Vision Method of Inspecting Missing Fastening Components in High-Speed Railway. Appl. Opt. 2011, 50, 3658–3665. [Google Scholar] [CrossRef] [PubMed]
- Resendiz, E.; Hart, J.M.; Ahuja, N. Automated Visual Inspection of Railroad Tracks. IEEE Trans. Intell. Transp. Syst. 2013, 14, 751–760. [Google Scholar] [CrossRef]
- Li, Y.; Trinh, H.; Haas, N.; Otto, C.; Pankanti, S. Rail Component Detection, Optimization, and Assessment for Automatic Rail Track Inspection. IEEE Trans. Intell. Transp. Syst. 2014, 15, 760–770. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, B.; Wu, J.; Xu, H.; Chen, X.; Na, W. Computer Vision System for Detecting the Loss of Rail Fastening Nuts Based on Kernel Two-Dimensional Principal Component—Two-Dimensional Principal Component Analysis and a Support Vector Machine. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2016, 230, 1842–1850. [Google Scholar] [CrossRef]
- Gibert, X.; Patel, V.M.; Chellappa, R. Robust Fastener Detection for Autonomous Visual Railway Track Inspection. In Proceedings of the 2015 IEEE Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 5–9 January 2015; pp. 694–701. [Google Scholar]
- Madejski, J. Autonomous Track Geometry Diagnostics System. J. Mater. Process. Technol. 2004, 157–158, 194–202. [Google Scholar] [CrossRef]
- Our Platform—RailPod, Inc. Available online: https://rail-pod.com/?page_id=2527 (accessed on 25 December 2022).
- Rowshandel, H.; Nicholson, G.L.; Davis, C.L.; Roberts, C. An Integrated Robotic System for Automatic Detection and Characterisation of Rolling Contact Fatigue Cracks in Rails Using an Alternating Current Field Measurement Sensor. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2013, 227, 310–321. [Google Scholar] [CrossRef]
- Mobile Robotic Inspection for Railway Infrastructures. Available online: https://www.loccioni.com/en/railway/ (accessed on 3 November 2022).
- Jung, S.; Song, S.; Kim, S.; Park, J.; Her, J.; Roh, K.; Myung, H. Toward Autonomous Bridge Inspection: A Framework and Experimental Results. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 24–27 June 2019; pp. 208–211. [Google Scholar]
- Wang, H.-F.; Zhai, L.; Huang, H.; Guan, L.-M.; Mu, K.-N.; Wang, G. Measurement for Cracks at the Bottom of Bridges Based on Tethered Creeping Unmanned Aerial Vehicle. Autom. Constr. 2020, 119, 103330. [Google Scholar] [CrossRef]
- Phillips, S.; Narasimhan, S. Automating Data Collection for Robotic Bridge Inspections. J. Bridge Eng. 2019, 24, 04019075. [Google Scholar] [CrossRef]
- Liu, D.; Dissayanake, G.; Manamperi, P.; Brooks, P.; Paul, G.; Webb, S.; Kirchner, N.; Chotiprayanakul, P.; Kwok, N.; Ren, T. A Robotic System for Steel Bridge Maintenance: Research Challenges and System Design. In Proceedings of the 2008 Australasian Conference on Robotics and Automation, ACRA 2008, Canberra, Australia, 3–5 December 2008. [Google Scholar]
- Wang, R.; Kawamura, Y. A Magnetic Climbing Robot for Steel Bridge Inspection. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 3303–3308. [Google Scholar]
- Oh, J.-K.; Lee, A.-Y.; Oh, S.M.; Choi, Y.; Yi, B.-J.; Yang, H.W. Design and Control of Bridge Inspection Robot System. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 3634–3639. [Google Scholar]
- Zhang, W.; Zhang, Z.; Qi, D.; Liu, Y. Automatic Crack Detection and Classification Method for Subway Tunnel Safety Monitoring. Sensors 2014, 14, 19307–19328. [Google Scholar] [CrossRef]
- Huang, H.; Li, Q.; Zhang, D. Deep Learning Based Image Recognition for Crack and Leakage Defects of Metro Shield Tunnel. Tunn. Undergr. Space Technol. 2018, 77, 166–176. [Google Scholar] [CrossRef]
- NR-L2-TRK-001-MOD11; Track Geometry—Inspections and Minimum Actions. Network Rail Standard, Network Rail: London, UK, 2015.
- Martland, C.D. Analysis of the Potential Impacts of Automation and Robotics on Locomotive Rebuilding. IEEE Trans. Eng. Manag. 1987, EM-34, 92–100. [Google Scholar] [CrossRef]
- Wiercienski, W.; Leek, A.R. Feasibility of Robotic Cleaning of the Undersides of Toronto Subway Cars. In Proceedings of the IEEE 39th Vehicular Technology Conference, San Francisco, CA, USA, 1–3 May 1989; Volume 2, pp. 884–887. [Google Scholar]
- Yaguchi, H. Robot Introduction to Cleaning Work in the East Japan Railway Company. Adv. Robot. 1995, 10, 403–414. [Google Scholar] [CrossRef]
- Xu, H.; Xue, K.; Yu, S.; Gao, X.; Qing, C.; Wei, R. Control for an Innovative Robotics Platform of Rinsing System for Vehicles of Urban Mass Transit. In Proceedings of the 2007 IEEE International Conference on Mechatronics, Kumamoto, Japan, 8–10 May 2007; pp. 1–6. [Google Scholar]
- Tomiyama, T.; García, L.R.; Kršlin, A.; Taykaldiranian, G. Systems and Conceptual Design of a Train Cab Front Cleaning Robot. Procedia CIRP 2017, 59, 61–66. [Google Scholar] [CrossRef]
- García, L.R. Conceptual Design of Cab Front Robotic Cleaner; Cranfield University: Bedford, UK, 2016. [Google Scholar]
- Robot in the Maintenance of Cars. Available online: http://www.vale.com/brasil/EN/aboutvale/news/Pages/robos-manutencao-vagoes.aspx (accessed on 4 November 2022).
- Railway Wheel Set Maintenance, Production. Available online: https://nsh-usa.com/ (accessed on 4 November 2022).
- Jaiswal, J.; Smith, S.F.; Cox, R.; Kabo, E. Repair of Discrete Rail Head Defect—A Novel Technology. Collect. Open Conf. Res. Transp. 2018, 2018, 1005. [Google Scholar] [CrossRef]
- Campos, M.F.M.; Pereira, G.A.S.; Vale, S.R.C.; Bracarense, A.Q.; Pinheiro, G.A.; Oliveira, M.P. A Mobile Manipulator for Installation and Removal of Aircraft Warning Spheres on Aerial Power Transmission Lines. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 4, pp. 3559–3564. [Google Scholar]
- Debenest, P.; Guarnieri, M.; Takita, K.; Fukushima, E.F.; Hirose, S.; Tamura, K.; Kimura, A.; Kubokawa, H.; Iwama, N.; Shiga, F. Sensor-Arm—Robotic Manipulator for Preventive Maintenance and Inspection of High-Voltage Transmission Lines. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 1737–1744. [Google Scholar]
- Allan, J.-F.; Lambert, G.; Lavoie, S.; Reiher, S. Development of a Mobile Robotic Platform for the Underground Distribution Lines. In Proceedings of the 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xian, China, 2–5 July 2008; pp. 406–411. [Google Scholar]
- Allan, J.-F.; Reiher, S.; Lambert, G.; Lavoie, S. Field Tests of a Robot System Prototype for the Underground Distribution Lines. In Proceedings of the IEEE PES T&D 2010, New Orleans, LO, USA, 19–22 April 2010; pp. 1–5. [Google Scholar]
- Pouliot, N.; Montambault, S. LineScout Technology: From Inspection to Robotic Maintenance on Live Transmission Power Lines. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1034–1040. [Google Scholar]
- Jin, J.; Zhang, G.; Zhang, T. Design of a Mobile Robot for the Innovation in Power Line Inspection and Maintenance. In Proceedings of the 2009 ASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots, London, UK, 22–24 June 2009; pp. 444–449. [Google Scholar]
- Guo, R.; Zhang, F.; Cao, L.; Yong, J. A Mobile Robot for Inspection of Overhead Transmission Lines. In Proceedings of the 2014 3rd International Conference on Applied Robotics for the Power Industry, Foz do Iguassu, Brazil, 14 October 2014; pp. 1–3. [Google Scholar]
- Feng, J.; Zhang, W. Autonomous Live-Line Maintenance Robot for a 10 KV Overhead Line. IEEE Access 2021, 9, 61819–61831. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, F.; Jiang, Y.; Liu, G.; Peng, X. Development of an Inspection Robot for 500 KV EHV Power Transmission Lines. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 5107–5112. [Google Scholar]
- Perez-Jimenez, M.; Montes-Grova, M.A.; Ramon-Soria, P.; Arrue, B.C.; Ollero, A. POSITRON: Lightweight Active Positioning Compliant Joints Robotic Arm in Power Lines Inspection. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1 September 2020; pp. 729–736. [Google Scholar]
- Suarez, A.; Salmoral, R.; Zarco-Periñan, P.J.; Ollero, A. Experimental Evaluation of Aerial Manipulation Robot in Contact With 15 KV Power Line: Shielded and Long Reach Configurations. IEEE Access 2021, 9, 94573–94585. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Zhou, Y.; Fu, M.; Yang, S. Research on the Technology of Indoor and Outdoor Integration Robot Inspection in Substation. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15 March 2019; pp. 2366–2369. [Google Scholar]
- Zhang, X.; Huang, R.; Li, X.; Ai, J.; Dong, X.; Li, J.; Wang, Z. Development of the Maintenance Robot with Electrification Used in Substation. In Proceedings of the 2017 Second International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Harbin, China, 8 December 2017; pp. 30–33. [Google Scholar]
- Liu, S.; Zhang, X.; Huang, R.; Dong, X.; Li, J.; Chen, Q. Optimization Design of the Maintenance Robot with Charged Used in Substation. In Proceedings of the 2018 3rd International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Huhhot, China, 14 September 2018; pp. 141–144. [Google Scholar]
- Hibino, A.; Kawai, T.; Nako, M.; He, Y.; Aoyama, K.; Iwata, Y.; Isogai, T.; Takeuchi, S.; Tatsuno, K. Development of a Semi-Autonomous Remote Maintenance Robot. In Proceedings of the 2009 International Symposium on Micro-NanoMechatronics and Human Science, Nagoya, Japan, 9 November 2009; pp. 396–401. [Google Scholar]
- di Castro, M.; Ferre, M.; Masi, A. CERNTAURO: A Modular Architecture for Robotic Inspection and Telemanipulation in Harsh and Semi-Structured Environments. IEEE Access 2018, 6, 37506–37522. [Google Scholar] [CrossRef]
- Dehne, A.; Moller, N.; Hermes, T. MARWIN: A Mobile Autonomous Robot for Maintenance and Inspection in a 4d Environment. In Proceedings of the 2017 International Conference on Research and Education in Mechatronics (REM), Wolfenbuettel, Germany, 14 September 2017; pp. 1–5. [Google Scholar]
- Mingfei, W.; Wusheng, C.; Jiaxin, F. Development and Implementation of a Multifunctional Inspection and Rescue Robot System for Fusion Facility. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25 March 2017; pp. 204–210. [Google Scholar]
- Morra, D.; Cervera, E.; Buonocore, L.R.; Cacace, J.; Ruggiero, F.; Lippiello, V.; di Castro, M. Visual Control through Narrow Passages for an Omnidirectional Wheeled Robot. In Proceedings of the 2022 30th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 28 July 2022; pp. 551–556. [Google Scholar]
- Zhang, X.; Zhang, J.; Yuan, J.; Li, M. Development of an Underwater Robot for Nuclear Reactor Vessel. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12 December 2013; pp. 1699–1703. [Google Scholar]
- Chermprayong, P.; Zhang, K.; Xiao, F.; Kovac, M. An Integrated Delta Manipulator for Aerial Repair: A New Aerial Robotic System. IEEE Robot. Autom. Mag. 2019, 26, 54–66. [Google Scholar] [CrossRef]
- Junjie, P. Design and Trajectory Planning of Blocking Plate Robot in Steam Generator. In Proceedings of the 2020 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 28 July 2020; pp. 108–111. [Google Scholar]
- Qiu, Y.; Guo, B.; Xue, L.; Liang, B.; Li, C. On-Orbit Servicing to GEO Satellite Using Dual Arm Free-Flying Space Robot. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangxi, China, 19 December 2009; pp. 2451–2456. [Google Scholar]
- Du, X.; He, Y.; Chen, L.; Gao, S. Pose Estimation of Large Non-Cooperative Spacecraft Based on Extended PnP Model. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3 December 2016; pp. 413–418. [Google Scholar]
- Hanlon, E.A.S.; Lange, M.E.; Keegan, B.P.; Culton, E.A.; Corbett, M.J.; Roser, J.G.; Safbom, C.P.; Wenger, B.A.; Kang, J.S. AMODS: Autonomous Mobile on-Orbit Diagnostic System. In Proceedings of the 2016 IEEE Aerospace Conference, Sky, MT, USA, 5–12 March 2016; pp. 1–10. [Google Scholar]
- Shi, L.; Jayakody, H.; Katupitiya, J.; Jin, X. Coordinated Control of a Dual-Arm Space Robot: Novel Models and Simulations for Robotic Control Methods. IEEE Robot. Autom. Mag. 2018, 25, 86–95. [Google Scholar] [CrossRef]
- Dongming, G.E.; Guanghui, S.; Yuanjie, Z.; Jixin, S. Impedance Control of Multi-Arm Space Robot for the Capture of Non-Cooperative Targets. J. Syst. Eng. Electron. 2020, 31, 1051–1061. [Google Scholar] [CrossRef]
- García, J.; Gonzalez, D.; Rodríguez, A.; Santamaria, B.; Estremera, J.; Armendia, M. Application of Impedance Control in Robotic Manipulators for Spacecraft On-Orbit Servicing. In Proceedings of the 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 10–13 September 2019; pp. 836–842. [Google Scholar]
- Wang, H.; Zhang, B.; Zhang, T.; Jakacky, A. Tele-Operating a Collaborative Robot for Space Repairs with Virtual Reality. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; pp. 175–180. [Google Scholar]
- Wang, H.; Mecham, R.; Zhang, B. A Method Targeting Repair in Space: Tele-Operating a Collaborative Robot with Virtual Reality. In Proceedings of the 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Honolulu, HI, USA, 31 July–4 August 2017; pp. 1068–1071. [Google Scholar]
- Chamberlain, D.A.; Gambao, E. A Robotic System for Concrete Repair Preparation. IEEE Robot. Autom. Mag. 2002, 9, 36–44. [Google Scholar] [CrossRef]
- La, H.M.; Lim, R.S.; Basily, B.; Gucunski, N.; Yi, J.; Maher, A.; Romero, F.A.; Parvardeh, H. Autonomous Robotic System for High-Efficiency Non-Destructive Bridge Deck Inspection and Evaluation. In Proceedings of the 2013 IEEE International Conference on Automation Science and Engineering (CASE), Madison, WI, USA, 17–20 August 2013; pp. 1053–1058. [Google Scholar]
- Liu, F.; Trkov, M.; Yi, J.; Gucunski, N. Modeling of Pure Percussive Drilling for Autonomous Robotic Bridge Decks Rehabilitation. In Proceedings of the 2013 IEEE International Conference on Automation Science and Engineering (CASE), Madison, WI, USA, 17–20 August 2013; pp. 1063–1068. [Google Scholar]
- van Nguyen, L.; Gibb, S.; Pham, H.X.; La, H.M. A Mobile Robot for Automated Civil Infrastructure Inspection and Evaluation. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6. [Google Scholar]
- Kahouadji, M.; Lakhal, O.; Yang, X.; Belarouci, A.; Merzouki, R. System of Robotic Systems for Crack Predictive Maintenance. In Proceedings of the 2021 16th International Conference of System of Systems Engineering (SoSE), Västerås, Sweden, 14–18 June 2021; pp. 197–202. [Google Scholar]
- Orr, L.; Stephens, B.; Kocer, B.B.; Kovac, M. A High Payload Aerial Platform for Infrastructure Repair and Manufacturing. In Proceedings of the 2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), Biograd na Moru, Croatia, 4–5 October 2021; pp. 1–6. [Google Scholar]
- Charlton, D.; Taylor, J.; Vougioukas, S.; Rutledge, Z. Innovations for a Shrinking Agricultural Workforce. Choises 2019, 34, 1–8. [Google Scholar]
- Shademani, S.; Zarafshan, P.; Khashechi, M.; Kianmehr, M.H.; Hashemy, S.M. Design and Analysis of a Dredger Robot for Covered Irrigation Canals. In Proceedings of the 2017 5th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 25–27 October 2017; pp. 162–167. [Google Scholar]
- Majdoubi, R.; Masmoudi, L. Eco-Design of a Mobile Agriculture Robot Based on Classical Approach and FEM Creteria. In Proceedings of the 2021 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 19–20 February 2021; pp. 978–982. [Google Scholar]
- Hrabar, I.; Goričanec, J.; Kovačić, Z. Towards Autonomous Navigation of a Mobile Robot in a Steep Slope Vineyard. In Proceedings of the 2021 44th International Convention on Information, Communication and Electronic Technology (MIPRO), Opatija, Croatia, 27 September–1 October 2021; pp. 1119–1124. [Google Scholar]
- Qingchun, F.; Wengang, Z.; Quan, Q.; Kai, J.; Rui, G. Study on Strawberry Robotic Harvesting System. In Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Zhangjiajie, China, 25–27 May 2012; Volume 1, pp. 320–324. [Google Scholar]
- Khort, D.; Kutyrev, A.; Filippov, R.; Kiktev, N.; Komarchuk, D. Robotized Platform for Picking of Strawberry Berries. In Proceedings of the 2019 IEEE International Scientific-Practical Conference Problems of Infocommunications, Science and Technology (PIC S&T), Kyiv, Ukraine, 8–11 October 2019; pp. 869–872. [Google Scholar]
- Vineet, S.; Deshmukh, D.; Pratihar, D.K.; Deb, A.K.; Ray, H.; Bhattacharyya, N. Dynamic Analysis of Tracked Mobile Manipulator Used in Agriculture. In Proceedings of the 2021 IEEE 18th India Council International Conference (INDICON), Guwahati, India, 19–21 December 2021; pp. 1–6. [Google Scholar]
- Robotic Mobility Platforms. Available online: https://stanleyinnovation.com/products-services/robotics/robotic-mobility-platforms/ (accessed on 7 March 2023).
- Robots/RMPv3—ROS Wiki. Available online: http://wiki.ros.org/Robots/RMPv3 (accessed on 7 March 2023).
- Helms, E.; Schraft, R.D.; Hagele, M. Rob@work: Robot Assistant in Industrial Environments. In Proceedings of the 11th IEEE International Workshop on Robot and Human Interactive Communication Proceedings, Berlin, Germany, 27 September 2002; pp. 399–404. [Google Scholar]
- Hvilshøj, M.; Bøgh, S.; Madsen, O.; Kristiansen, M. The Mobile Robot “Little Helper”: Concepts, Ideas and Working Principles. In Proceedings of the 2009 IEEE Conference on Emerging Technologies & Factory Automation, Palma de Mallorca, Spain, 22–25 September 2009; pp. 1–4. [Google Scholar]
- Mobile Manipulators Robots—Robot Manipulator|Robotnik®. Robotnik. Available online: https://robotnik.eu/products/mobile-manipulators/ (accessed on 30 April 2023).
- Designboom, Nate Archer I. Willow Garage PR2. Available online: https://www.designboom.com/technology/willow-garage-pr2/ (accessed on 21 November 2022).
- Raj, D.S.; Sethuraman, T.V.; Yashvanth, V.P.; Perepu, S.K.; Mohan, S. An Autonomous Drone with Robotic End Effector for Maintenance Operation of 5G Mobile Towers. In Proceedings of the 2020 3rd International Conference on Control and Robots (ICCR), Tokyo, Japan, 26–29 December 2020; pp. 11–16. [Google Scholar]
- Ding, C.; Lu, L.; Wang, C.; Ding, C. Design, Sensing, and Control of a Novel UAV Platform for Aerial Drilling and Screwing. IEEE Robot. Autom. Lett. 2021, 6, 3176–3183. [Google Scholar] [CrossRef]
- Ollero, A.; Heredia, G.; Franchi, A.; Antonelli, G.; Kondak, K.; Sanfeliu, A.; Viguria, A.; Dios, J.R.M.; Pierri, F.; Cortes, J.; et al. The AEROARMS Project: Aerial Robots with Advanced Manipulation Capabilities for Inspection and Maintenance. IEEE Robot. Autom. Mag. 2018, 25, 12–23. [Google Scholar] [CrossRef]
- Kim, H.; Seo, H.; Son, C.Y.; Lee, H.; Kim, S.; Kim, H.J. Cooperation in the Air: A Learning-Based Approach for the Efficient Motion Planning of Aerial Manipulators. IEEE Robot. Autom. Mag. 2018, 25, 76–85. [Google Scholar] [CrossRef]
- Staub, N.; Bicego, D.; Sablé, Q.; Arellano, V.; Mishra, S.; Franchi, A. Towards a Flying Assistant Paradigm: The OTHex. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6997–7002. [Google Scholar]
- Hong, J.; Kim, T.; Chae, H.; Park, G.; Lee, J.; Kim, J.; Kim, H.S.; Seo, T. Design of Window-Cleaning Robotic Manipulator with Compliant Adaptation Capability. IEEE/ASME Trans. Mechatron. 2020, 25, 1878–1885. [Google Scholar] [CrossRef]
- Liang, J.; Wang, Y.; Wang, R.; Li, J.; Wang, H.; Liu, S. A Patrol Robot with Automatic Capture and Storage of Files. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; Volume 9, pp. 1651–1655. [Google Scholar]
- Jiang, Z.; Li, Z.; Li, C.; Yang, D.; Liu, H. Design and Preliminary Ground Experiment for Robotic Assembly of a Modular Space Telescope. IEEE Access 2019, 7, 160870–160878. [Google Scholar] [CrossRef]
- Teshigawara, S.; Asada, H.H. A Mobile Extendable Robot Arm: Singularity Analysis and Design. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3 November 2019; pp. 5131–5138. [Google Scholar]
- Bouloubasis, K.; McKee, G.T. Cooperative Transport of Extended Payloads. In Proceedings of the ICAR ’05. Proceedings., 12th International Conference on Advanced Robotics, Seattle, WA, USA, 18–20 July 2005; pp. 882–887. [Google Scholar]
- Liu, Z.; Li, P.; Liu, J.; Li, P.; Guan, E.; Zhao, Y.-Z. THG: A Multifunctional Wall-Climbing Robot for the Large Penstock. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021; pp. 693–698. [Google Scholar]
- Yeung, Y.F.; Youcef-Toumi, K. An In-Pipe Manipulator for Contamination-Less Rehabilitation of Water Distribution Pipes. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 6390–6397. [Google Scholar]
- Liu, J.; Balatti, P.; Ellis, K.; Hadjivelichkov, D.; Stoyanov, D.; Ajoudani, A.; Kanoulas, D. Garbage Collection and Sorting with a Mobile Manipulator Using Deep Learning and Whole-Body Control. In Proceedings of the 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), Munich, Germany, 19–21 July 2021; pp. 408–414. [Google Scholar]
- Ibarra, A.; Cóndor, A.; Martínez, P.; Tipán, E. Control Reengineering Used for Rehabilitation of Andros Remotec Bomb Disposal Robot. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; pp. 1–6. [Google Scholar]
- Limparis, N.M.; Akin, D.L. Design of a Distributed Control Architecture for the SAMURAI Deep Submergence Manipulator. In Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles (AUV), Southampton, UK, 24–27 September 2012; pp. 1–8. [Google Scholar]
- Manley, J.E.; Halpin, S.; Radford, N.; Ondler, M. Aquanaut: A New Tool for Subsea Inspection and Intervention. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–4. [Google Scholar]
- Topini, E.; Bucci, A.; Gelli, J.; Topini, A.; Ridolfi, A.; Allotta, B. Advanced Underwater Manipulation Systems: An Overview of the SUONO Project. In Proceedings of the OCEANS 2021: San Diego—Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–7. [Google Scholar]
- Rahman, M.; Liu, H.; Cardenas, I.D.; Starr, A.; Hall, A.; Anderson, R. Towards an Autonomous RIRS: Design, Structure Investigation and Framework. In Proceedings of the 2021 7th International Conference on Mechatronics and Robotics Engineering (ICMRE), Budapest, Hungary, 3–5 February 2021; pp. 164–168. [Google Scholar]
- Rahimi, M.; Liu, H.; Rahman, M.; Carcel, C.R.; Durazo-Cardenas, I.; Starr, A.; Hall, A.; Anderson, R. Localisation and Navigation Framework for Autonomous Railway Robotic Inspection and Repair System. In Proceedings of the 10th International Conference on Through-Life Engineering Services, Enschede, The Netherlands, 16–17 November 2021; Social Science Research Network: Rochester, NY, USA, 2021. [Google Scholar]
- Rahman, M.; Liu, H.; Rahimi, M.; Carcel, C.R.; Kirkwood, L.; Durazo-Cardenas, I.; Starr, A. Investigating Precision and Accuracy of a Robotic Inspection and Repair System; Social Science Research Network: Rochester, NY, USA, 2021. [Google Scholar]
- He, F.; Durazo-Cardenas, I.; Liu, H.; Rahman, M.; Rahimi, M.; Starr, A.; Poulter, M. A Practical Demonstration of Autonomous Ultrasonic Testing for Rail Flaws Inspection; Cranfield University: Bedford, UK, 8 November 2022. [Google Scholar]
- Raffaini, P.; Manfredi, L. Project Management. In Endorobotics; Manfredi, L., Ed.; Academic Press: Cambridge, MA, USA, 2022; pp. 337–358. ISBN 978-0-12-821750-4. [Google Scholar]
- Rahman, M.; Liu, H.; Masri, M.; Durazo-Cardenas, I.; Starr, A. A Railway Track Reconstruction Method Using Robotic Vision on a Mobile Manipulator: A Proposed Strategy. Comput. Ind. 2023, 148, 103900. [Google Scholar] [CrossRef]
- Zivid, Zivid Two Industrial 3D Camera. Available online: https://www.zivid.com/zivid-two (accessed on 7 February 2023).
- VisualSFM: A Visual Structure from Motion System. Available online: http://ccwu.me/vsfm/index.html (accessed on 18 January 2023).
- Which Form of Transport Has the Smallest Carbon Footprint? Available online: https://ourworldindata.org/travel-carbon-footprint (accessed on 5 August 2022).
- Passenger Rail Performance|ORR Data Portal. Available online: https://dataportal.orr.gov.uk/statistics/performance/passenger-rail-performance/ (accessed on 5 December 2022).
- Preston, J.; Wall, G.; Batley, R.; Ibáñez, J.N.; Shires, J. Impact of Delays on Passenger Train Services: Evidence from Great Britain. Transp. Res. Rec. 2009, 2117, 14–23. [Google Scholar] [CrossRef]
- How Much Does It Cost to Integrate Robots? Available online: https://sp-automation.co.uk/how-much-does-it-cost-to-integrate-robots/ (accessed on 6 January 2023).
- ABB 6640 Robots—Robots Done Right. Available online: https://robotsdoneright.com/Articles/ABB-6640.html (accessed on 6 January 2023).
- Sikora, K. Cost Model Development for Autonomous Tunnel Inspection; Cranfield University: Bedford, UK, 2016. [Google Scholar]
- Panella, F.; Roecklinger, N.; Vojnovic, L.; Loo, Y.; Boehm, J. Cost-Benefit Analysis of Rail Tunnel Inspection For Photogrammetry And Laser Scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B2-2020, 1137–1144. [Google Scholar] [CrossRef]
- Health and Safety Statistics. Available online: https://www.hse.gov.uk/statistics/ (accessed on 30 April 2023).
- Rahman, M.; Rahimi, M.; Starr, A.; Cardenas, I.D.; Hall, A.; Anderson, R. Challenges for a Railway Inspection and Repair System from Railway Infrastructure. In Proceedings of the 2022 10th International Conference on Control, Mechatronics and Automation (ICCMA), Belval, Luxembourg, 9–12 November 2022; pp. 210–215. [Google Scholar]
- Lloyd’s Register Rail. Possession Management Review; Lloyd’s Register Rail: London, UK, 2012. [Google Scholar]
- Kirschgens, L.; Ugarte, I.; Gil-Uriarte, E.; Rosas, A.; Vilches, V. Robot Hazards: From Safety to Security. arXiv 2018, arXiv:1806.06681. [Google Scholar]
- Hawkins, R.; Osborne, M.; Parsons, M.; Nicholson, M.; McDermid, J.; Habli, I. Guidance on the Safety Assurance of Autonomous Systems in Complex Environments (SACE). arXiv 2022, arXiv:2208.00853. [Google Scholar]
- Desai, A.; Mital, A. Design for Maintenance: Basic Concepts and Review of Literature. Int. J. Prod. Dev. 2006, 3, 77–121. [Google Scholar] [CrossRef]
- Standards Catalogue. Available online: http://www.rssb.co.uk/standards-catalogue (accessed on 4 April 2023).
- Network Rail. Available online: https://global.ihs.com/csf_home.cfm?&csf=NR (accessed on 4 April 2023).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Main Tasks | Advantages | Disadvantages |
|---|---|---|---|
| Push trolley | Track inspection, carry material | Smaller in size, easy to transport | Slow speed, human-operated |
| Road-Rail Vehicle (RRV) | Repair, transport material, inspection | High speed, easy to transport | Costly, human-operated |
| Specialist trains | Repair and inspection of track | High speed and payload, multiple measurements | Very costly to operate |
| Train-borne system | Track inspection, track repair | Moderate cost, easy to install | Limited validation |
| Type | Main Function | Sensing Method | Key Technology and Contribution |
|---|---|---|---|
| STAR-TRACK [45] | Fastener maintenance | Monocular camera | Multi-robot autonomous track maintenance |
| Train-borne system [49] | Fastener inspection | TV camera | Neural classifier for fastener detection |
| Train-borne system [50] | Fastener detection | Video camera | Artificial lighting source to reduce ambiance noise |
| Visual inspection system for railway (VISyR) [51] | Fastener detection | Camera | Computer vision and machine learning, a maximum speed of 200 km/h |
| Train-borne system [52] | Fastener detection | Camera | Machine learning, structured lighting condition |
| Manual trolley [53] | Turn out and tie detection | Multiple cameras | Slow speed, a machine learning algorithm |
| RRV [54] | Track inspection | Four cameras, GPS | Defect location based on GPS |
| Train-borne system [55] | Fastener detection | CCD camera, GPS | Machine learning for detection and GPS for location information |
| Comprehensive track inspection vehicle (CTIV) [56] | Fastener detection | Camera | Fastener quality based on image and machine learning algorithm |
| Modified truck with sensor [46] | Railroad crossing inspection | Camera, LiDAR | Pattern recognition, 3D point cloud using support vector machine (SVM) |
| Diagnostic analysis for railways and trams (DART) [57] | Track geometry | Track measurement | Computer-assisted diagnostic tool |
| Hand-pushed inspection device [47] | Faulty rail profile detection | Multiple laser camera | 3D modeling, deep learning model for fault detection |
| Railpod [58] | Track inspection | Customizable based on requirements | Easy to transport, both rail and pneumatic wheel |
| Robot trolley with sensors [59] | Fatigue cracks on track | Alternating current field measurement (ACFM) | Automatic crack detection robot |
| AutoScan [48] | Crack detection on track | Electromagnetic acoustic transducer (EMAT) | Manipulator for inspection |
| RIIS1005 [22] | Multiple track defects | Camera, LiDAR | Easy-to-assemble and -disassemble, pattern recognition, deep learning |
| Felix [60] | Switches and crossings (S&C) | laser | Artificial vision system, wireless data transfer |
| Application | Base Robot | Sensing Method | Key Technology and Contribution |
|---|---|---|---|
| 5G tower maintenance [128] | Aerial | Camera | Tower inspection and repair, a study of manipulator stability with wind disturbance |
| Aerial drilling and screwing [129] | Aerial | Camera | An adaptive robust control system, real-time object detection |
| Outdoor maintenance in industry [130] | Aerial | LiDAR, stereo camera, GNSS | Multidirectional thrust controller |
| Cooperative payload delivery [131] | Aerial | RGB-D camera | Heavy load control, learning-based planning for aerial cooperation |
| Lifting bars for assembly [132] | Aerial | External motion capture system | Multidirectional thrust control flying |
| Window cleaning of building [133] | Magnetic climbing | Force sensors | Elastic actuators, passive obstacle avoidance |
| Archive room patrolling [134] | Ground | Infrared camera, laser | Storage basket, monitor abnormal temperature |
| Assembly task of space telescope [135] | Ground | Two cameras | Stretchable manipulator, assembly in space |
| Indoor sign inspection [136] | Ground | Camera | Scissor mechanism for manipulator |
| Dual robot payload delivery [137] | Ground | Multiple cameras | Extended payload carrying capability |
| Penstock inspection [138] | Ground | Camera, laser | Wall climbing capability |
| Water distribution pipe maintenance [139] | Ground | Four cameras | Navigation inside a pipe, contamination less rehabilitation (CLR) of pipe |
| Garbage collection and sorting [140] | Ground | RGB-D camera | Deep learning for garbage type identification |
| Bomb disposal [141] | Ground | Two cameras | Teleoperation |
| Hydraulic manipulator for undersea environments [142] | Underwater | Multiple cameras | Deep underwater operation |
| Transformable autonomous underwater vehicle [143] | Underwater | Camera | Control system similar to spaceflight, user in the loop over low-data transmission |
| Seabed inspection, repair [144] | Underwater | Camera | Free-floating actuation, a convolutional neural network for object recognition |
| Sensor | Purpose in RIRS |
|---|---|
| IMU | Localization and navigation |
| Wheel encoder | Localization and navigation |
| PTZ environment camera | Environment awareness |
| GPS | Localization, navigation, referencing defect position |
| Monocular camera | Defect detection, close inspection of defect |
| RGB-D camera | Defect detection, obstacle avoidance |
| LiDAR | 3D perception of surroundings, obstacle avoidance |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.; Liu, H.; Cardenas, I.D.; Starr, A.; Hall, A.; Anderson, R. A Review on the Prospects of Mobile Manipulators for Smart Maintenance of Railway Track. Appl. Sci. 2023, 13, 6484. https://doi.org/10.3390/app13116484
Rahman M, Liu H, Cardenas ID, Starr A, Hall A, Anderson R. A Review on the Prospects of Mobile Manipulators for Smart Maintenance of Railway Track. Applied Sciences. 2023; 13(11):6484. https://doi.org/10.3390/app13116484
Chicago/Turabian StyleRahman, Miftahur, Haochen Liu, Isidro Durazo Cardenas, Andrew Starr, Amanda Hall, and Robert Anderson. 2023. "A Review on the Prospects of Mobile Manipulators for Smart Maintenance of Railway Track" Applied Sciences 13, no. 11: 6484. https://doi.org/10.3390/app13116484