
Settlement Analysis of Fractional-Order Generalised Kelvin Viscoelastic Foundation under Distributed Loads

Abstract
:1. Introduction
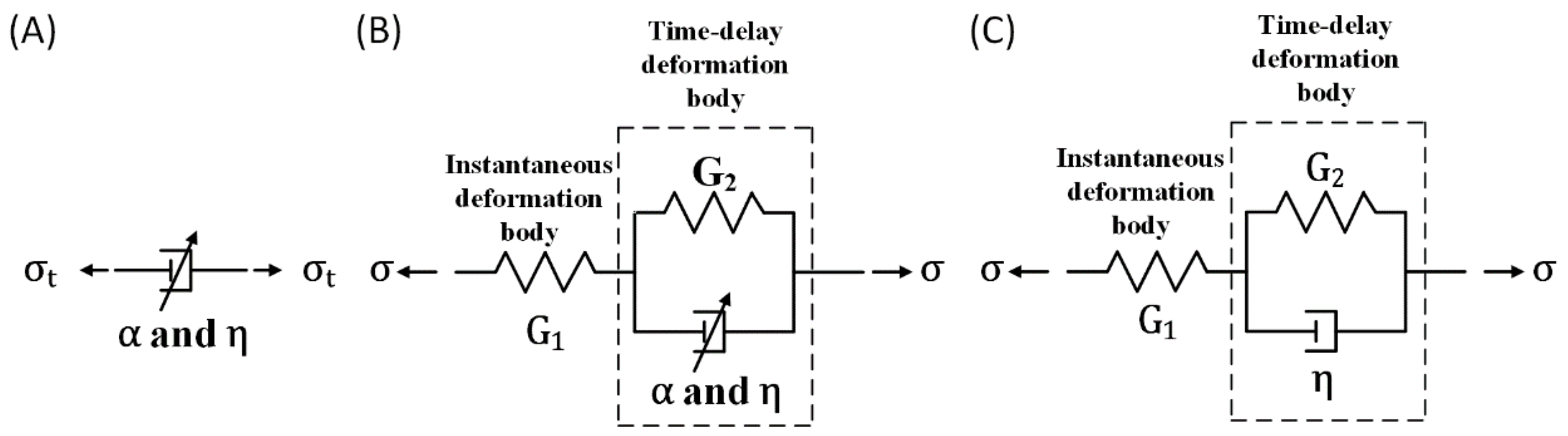
2. Fractional-Order Generalised Kelvin Model
3. Viscoelastic Solutions for Surface Settlement under Vertically Distributed Loads
3.1. Elastic Solutions
3.2. Viscoelastic Solutions
3.3. Analysis of Viscoelastic Solutions
4. Parametric Analysis and Parametric-Sensitivity Analysis
4.1. Effect of Differential Order
4.2. Influence of Shear Modulus ()
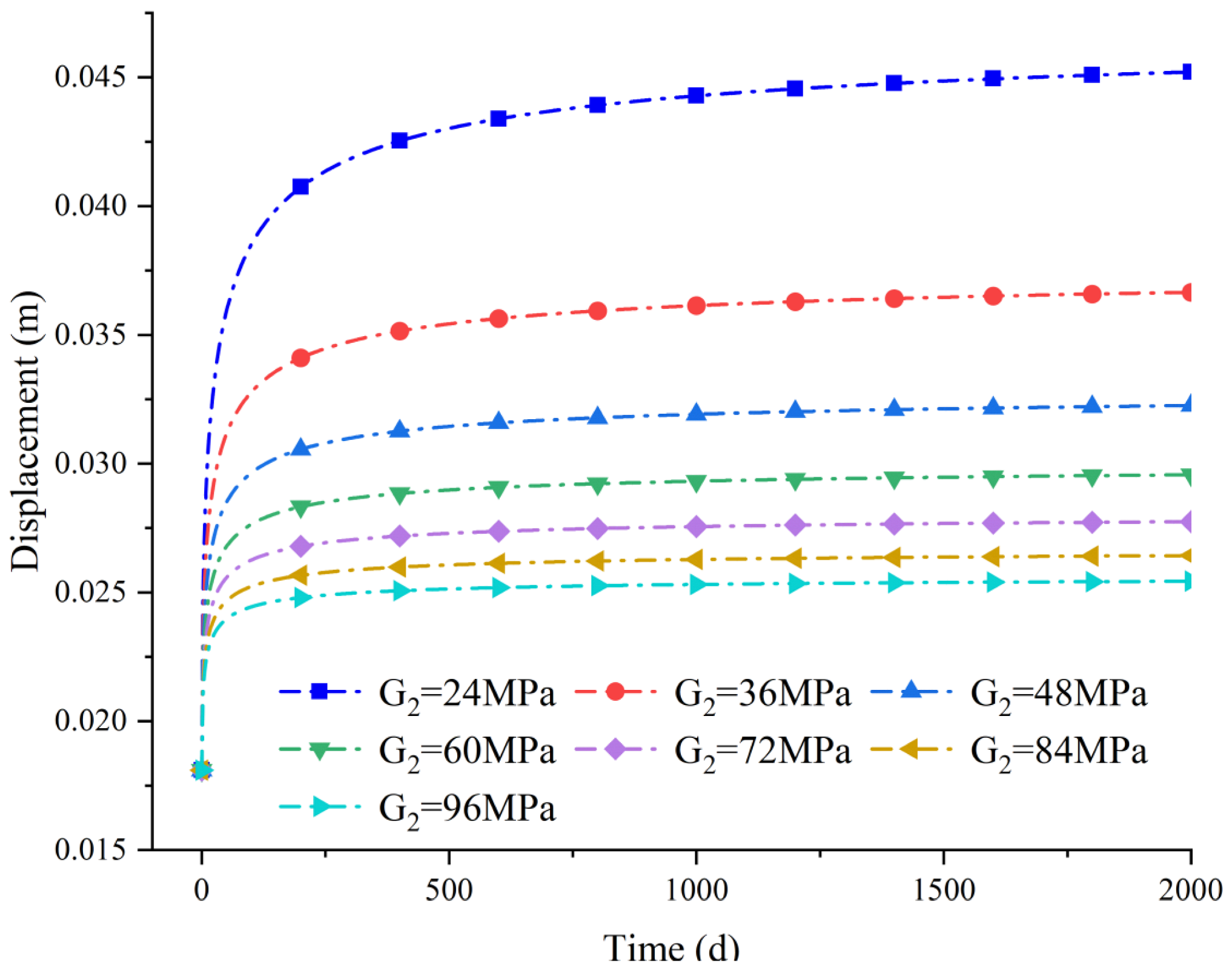
4.3. Influence of Shear Modulus ()
4.4. Effect of Viscosity Coefficient
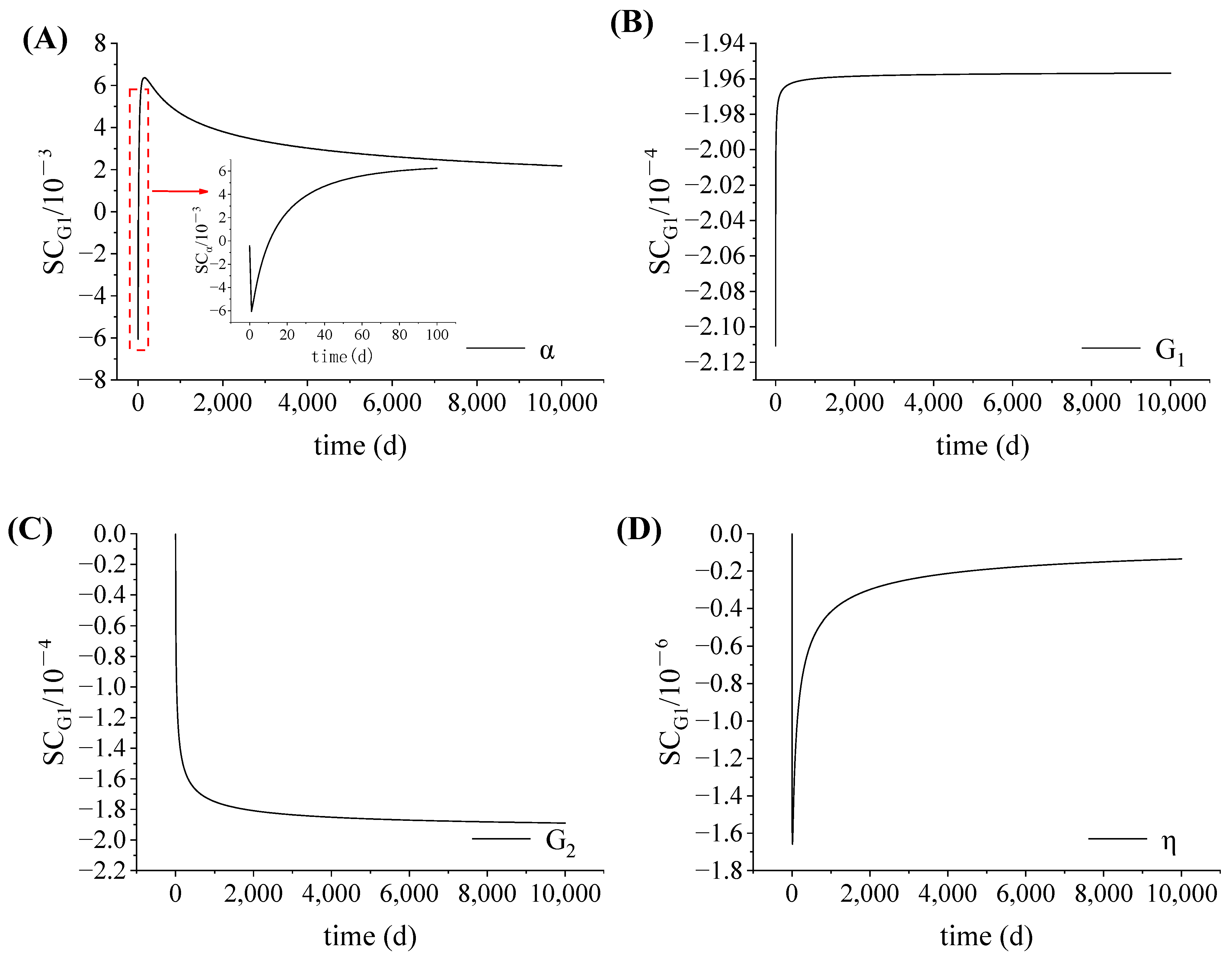
4.5. Parametric-Sensitivity Analyses
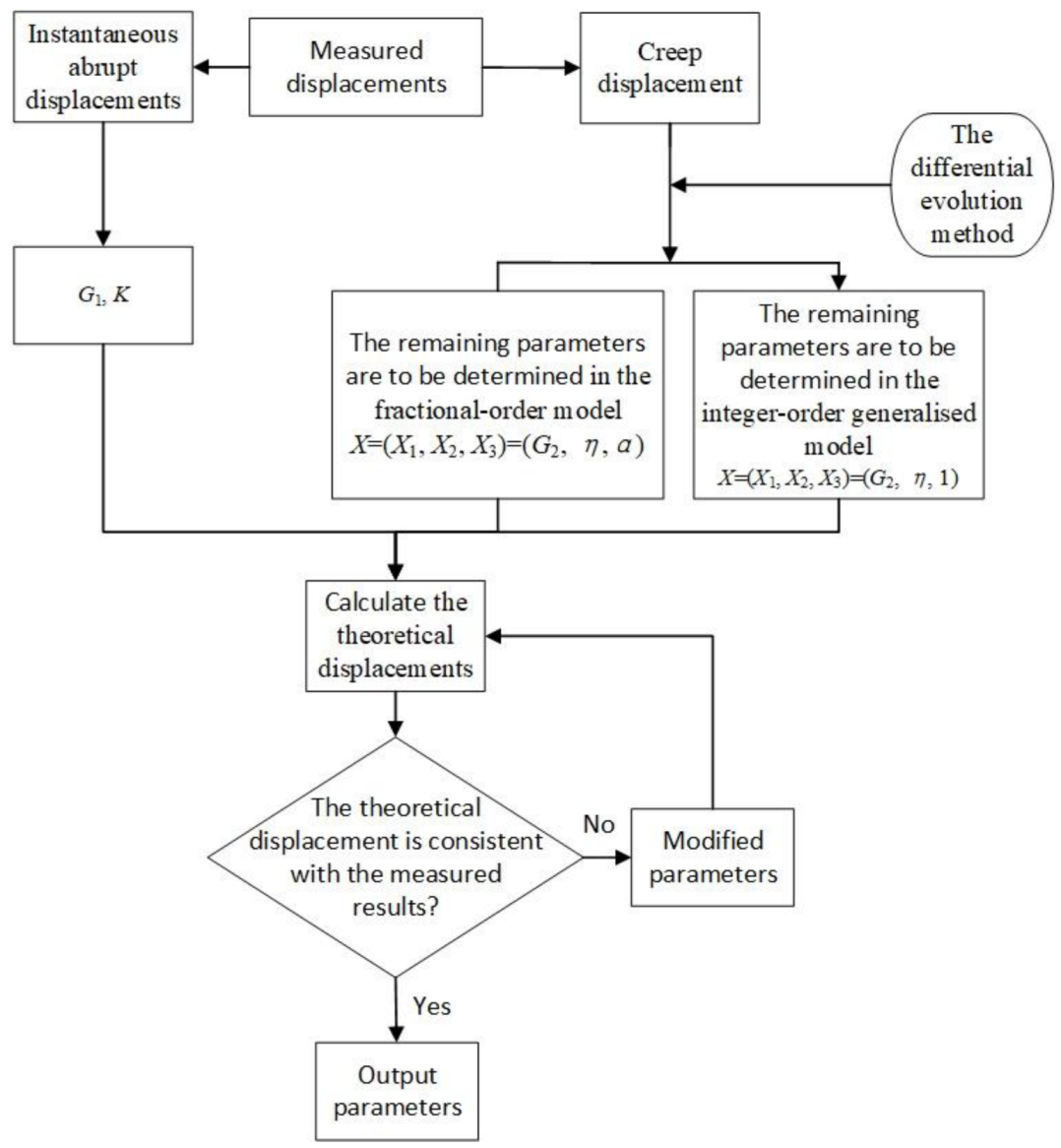
5. Method of Determining Parameters by Field Experiments
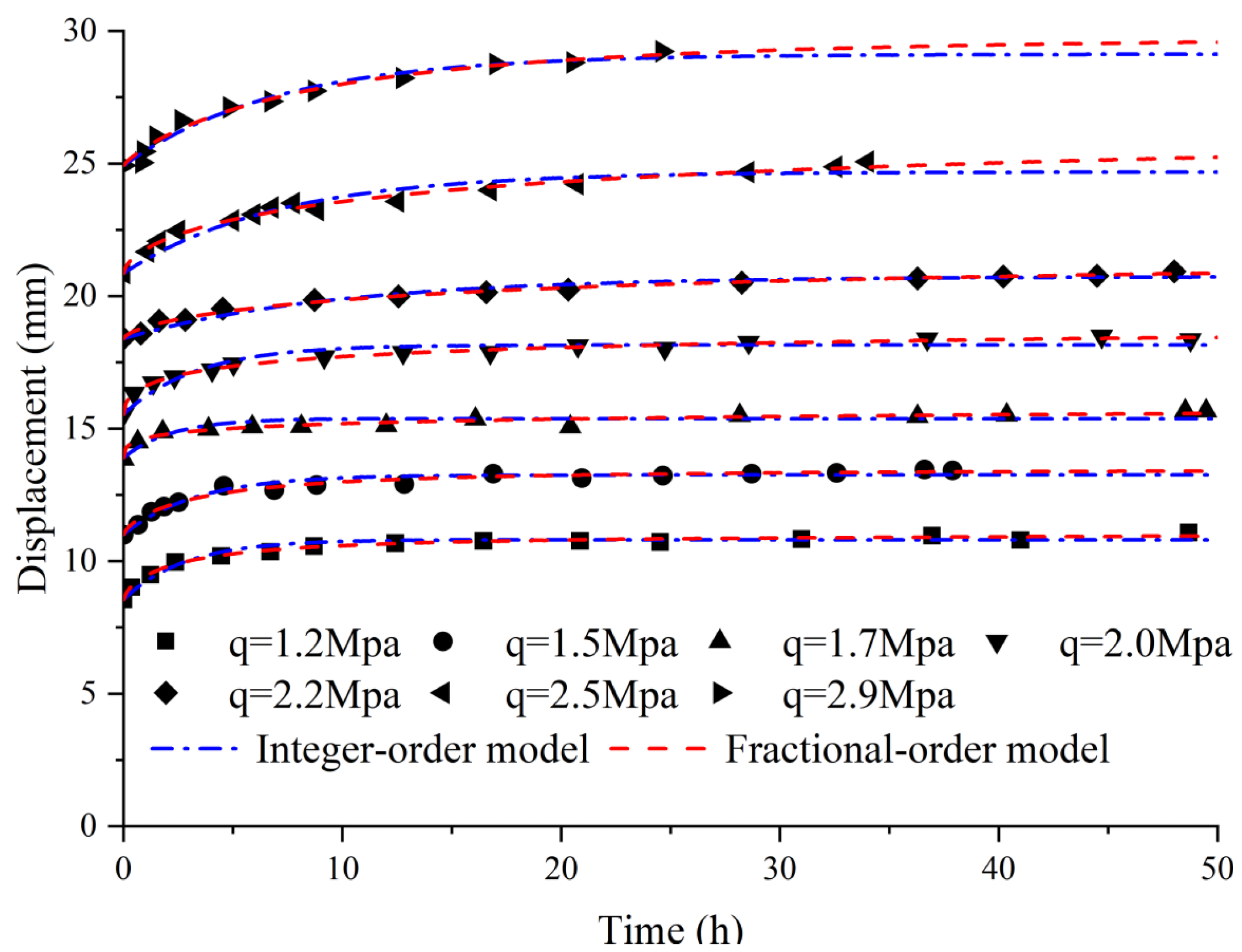
5.1. Parameter Identification of the Circular Flexible Bearing Plate Test
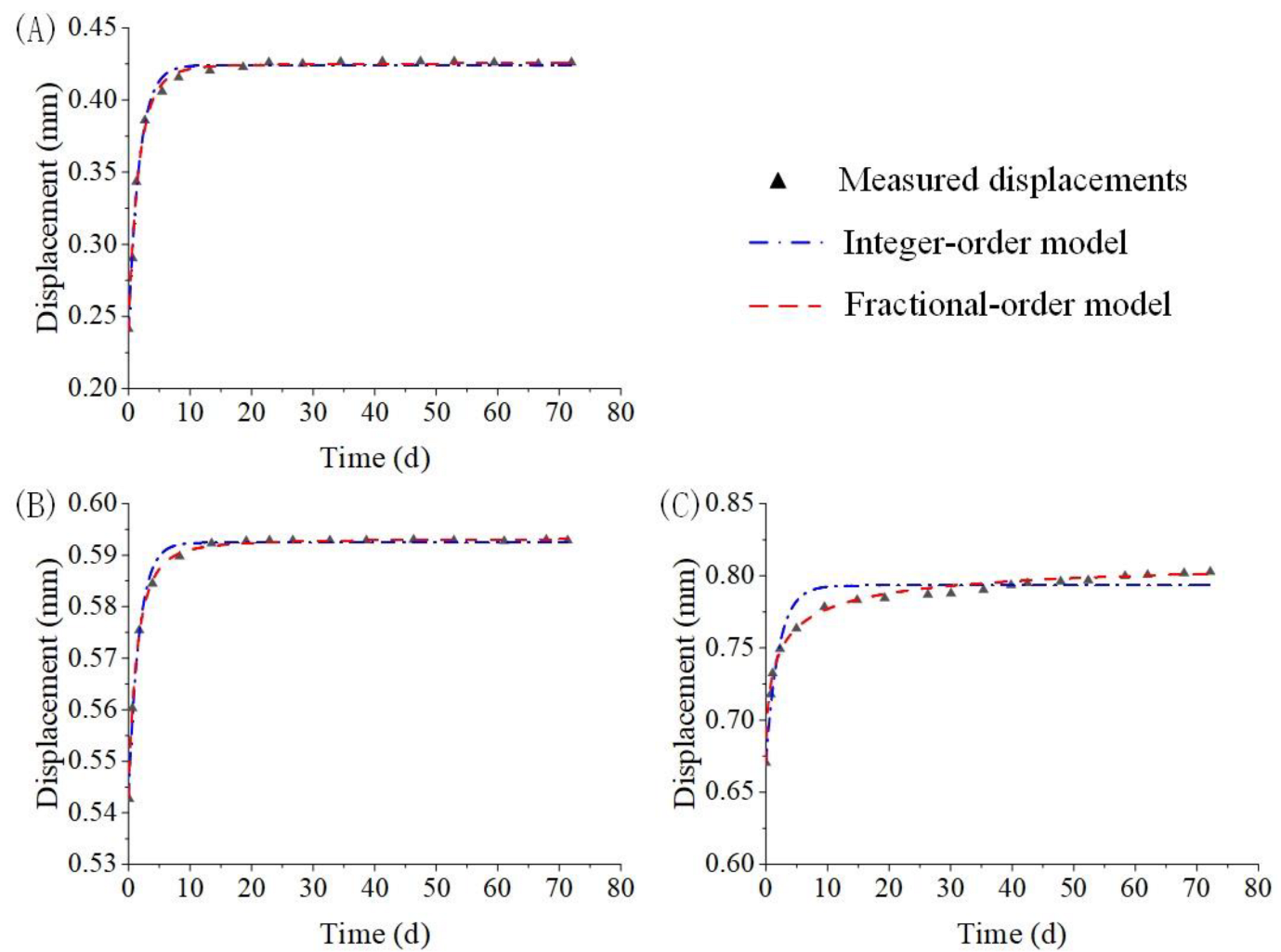
5.2. Parameter Identification of Circular Rigid Bearing Plate Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maheshwari, P.; Viladkar, M.; Kumar, A. Experimental evaluation of nonlinear Kelvin model constants from triaxial test data. Int. J. Geotech. Eng. 2011, 5, 363–371. [Google Scholar] [CrossRef]
- Zhao, D.; Jia, L.; Wang, M.; Wang, F. Displacement prediction of tunnels based on a generalised Kelvin constitutive model and its application in a subsea tunnel. Tunn. Undergr. Space Technol. 2016, 54, 29–36. [Google Scholar] [CrossRef]
- Huang, M.; Zhan, J.W.; Xu, C.S.; Jiang, S. New Creep Constitutive Model for Soft Rocks and Its Application in the Prediction of Time-Dependent Deformation in Tunnels. Int. J. Geomech. 2020, 20, 04020096. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, Q.; Huang, H.; Xue, X. Study on creep models and parameter inversion of columnar jointed basalt rock masses. Eng. Geol. 2021, 290, 106206. [Google Scholar] [CrossRef]
- Li, Y.-P.; Wang, Z.-Y.; Ding, X.-L. Model identification for rheological load test curve and its application. J. Univ. Pet. China Nat. Sci. Ed. 2005, 29, 73–77. [Google Scholar]
- Yang, W.; Zhang, Q.; Li, S.; Wang, S. Estimation of in situ viscoelastic parameters of a weak rock layer by time-dependent plate-loading tests. Int. J. Rock Mech. Min. Sci. 2014, 66, 169–176. [Google Scholar] [CrossRef]
- Xiong, S.; Zhou, H.; Zhong, Z. Study of methodology of plate-loading creep test of rock mass. Chin. J. Rock Mech. Eng. 2009, 28, 2121–2127. [Google Scholar]
- Huang, S.; Ding, X.; He, J.; Xiong, S. Analytical solution for rock mass bearing plate rheological tests based on a novel viscoelastic combination model. Eur. J. Environ. Civ. Eng. 2022, 26, 3204–3218. [Google Scholar] [CrossRef]
- Zhou, F.-X.; Wang, L.-Y.; Liu, Z.-Y.; Zhao, W.-C. A viscoelastic-viscoplastic mechanical model of time-dependent materials based on variable-order fractional derivative. Mech. Time Depend. Mater. 2021, 26, 699–717. [Google Scholar] [CrossRef]
- Lewandowski, R.; Chorążyczewski, B. Identification of the parameters of the Kelvin–Voigt and the Maxwell fractional models, used to modeling of viscoelastic dampers. Comput. Struct. 2010, 88, 1–17. [Google Scholar] [CrossRef]
- Beltempo, A.; Zingales, M.; Bursi, O.S.; Deseri, L. A fractional-order model for aging materials: An application to concrete. Int. J. Solids Struct. 2018, 138, 13–23. [Google Scholar] [CrossRef]
- Meng, R.; Yin, D.; Yang, H.; Xiang, G. Parameter study of variable order fractional model for the strain hardening behavior of glassy polymers. Phys. A Stat. Mech. Its Appl. 2020, 545, 123763. [Google Scholar] [CrossRef]
- Liu, F.; Wang, J.; Long, S.; Zhang, H.; Yao, X. Experimental and modeling study of the viscoelastic-viscoplastic deformation behavior of amorphous polymers over a wide temperature range. Mech. Mater. 2022, 167, 104246. [Google Scholar] [CrossRef]
- Xiang, G.; Yin, D.; Cao, C.; Gao, Y. Fractional description of creep behavior for fiber reinforced concrete: Simulation and parameter study. Constr. Build. Mater. 2022, 318, 126101. [Google Scholar] [CrossRef]
- Wu, F.; Zhang, H.; Zou, Q.; Li, C.; Chen, J.; Gao, R. Viscoelastic-plastic damage creep model for salt rock based on fractional derivative theory. Mech. Mater. 2020, 150, 103600. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, G.; Zhao, B.; Wang, Y. Unexpected viscoelastic deformation of tight sandstone: Insights and predictions from the fractional Maxwell model. Sci. Rep. 2017, 7, 11336. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.-Z.; Zhang, W. Analysis of soft soil with viscoelastic fractional derivative Kelvin model. Rock Soil Mech. 2007, 28, 1983–1986. [Google Scholar]
- Zhou, H.W.; Wang, C.P.; Han, B.B.; Duan, Z.Q. A creep constitutive model for salt rock based on fractional derivatives. Int. J. Rock Mech. Min. Sci. 2011, 48, 116–121. [Google Scholar] [CrossRef]
- Zhou, H.W.; Liu, D.; Lei, G.; Xue, D.J.; Zhao, Y. The Creep-Damage Model of Salt Rock Based on Fractional Derivative. Energies 2018, 11, 2349. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Yin, D. A full-stage creep model for rocks based on the variable-order fractional calculus. Appl. Math. Model. 2021, 95, 435–446. [Google Scholar] [CrossRef]
- Liu, N.; Zhu, W.S.; Li, X.J. Analysis of finite element viscoelastic displacement based on Kelvin model. Adv. Mater. Res. 2008, 33, 413–420. [Google Scholar] [CrossRef]
- Qin, W. Deformation analysis of fractional derivative Kelvin model foundation under horizontal concentrated force. Chin. J. Appl. Mech. 2021, 38, 2132–2136. [Google Scholar]
- Li, X.-M.; Zhang, Q.-Q.; Feng, R.-F.; Qian, J.-G.; Wei, H.-W. Long-Term Deformation Analysis for a Vertical Concentrated Force Acting in the Interior of Fractional Derivative Viscoelastic Soils. Int. J. Geomech. 2020, 20, 04020040. [Google Scholar] [CrossRef]
- Zhu, H.-H.; Liu, L.-C.; Pei, H.-F.; Shi, B. Settlement analysis of viscoelastic foundation under vertical line load using a fractional Kelvin-Voigt model. Geomech. Eng. 2012, 4, 67–78. [Google Scholar] [CrossRef]
- Lee, E. Stress analysis in visco-elastic bodies. Q. Appl. Math. 1955, 13, 183–190. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Jian, B.; Zuo, C.; Yu, X. In-situ rheological test and study of soft rock at Goupitan Hydropower Station. Yangtze River 2015, 46, 48–51. [Google Scholar]
- Sakurai, S. Back Analysis in Rock Engineering; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Koeller, R.C. Applications of Fractional Calculus to the Theory of Viscoelasticity. J. Appl. Mech. 1984, 51, 299–307. [Google Scholar] [CrossRef]
- Lurie, A.I.; Belyaev, A. Theory of Elasticity; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Miller, K.S.; Samko, S.G. Completely monotonic functions. Integral Transform. Spec. Funct. 2001, 12, 389–402. [Google Scholar] [CrossRef]
- Gu, R.R.; Li, Y. River temperature sensitivity to hydraulic and meteorological parameters. J. Environ. Manag. 2002, 66, 43–56. [Google Scholar] [CrossRef]
- Opara, K.R.; Arabas, J. Differential Evolution: A survey of theoretical analyses. Swarm Evol. Comput. 2019, 44, 546–558. [Google Scholar] [CrossRef]
- Balakrishna, C.K.; Murthy, B.R.S.; Nagaraj, T.S. Stress distribution beneath rigid circular foundations on sands. Int. J. Numer. Anal. Methods Geomech. 1992, 16, 65–72. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Shear modulus (MPa) | 60 |
| Shear modulus (MPa) | 60 |
| Bulk modulus (MPa) | 80 |
| Viscosity coefficient (MPa·d) | 1000 |
| Fractional differential order | 0.5 |
| 2 | 3.3087 | 1.9852 | 1.8081 | 3.2682 | 0.9929 |
| 3 | 2.2010 | 1.3180 | 10.4010 | 17.9602 | 0.9938 |
| 4 | 2.3760 | 1.4228 | 5.5509 | 11.5528 | 0.9401 |
| 2 | 3.3087 | 1.9852 | 1.7919 | 3.2802 | 0.9412 | 0.9941 |
| 3 | 2.2010 | 1.3180 | 10.2042 | 17.5820 | 0.8680 | 0.9993 |
| 4 | 2.3760 | 1.4228 | 4.6696 | 15.5269 | 0.5330 | 0.9932 |
| 1.2 | 34.77 | 20.86 | 56.13 | 160.09 | 0.9631 |
| 1.5 | 33.77 | 20.26 | 70.69 | 237.65 | 0.9602 |
| 1.7 | 30.29 | 18.18 | 112.89 | 270.78 | 0.8177 |
| 2.0 | 31.89 | 19.13 | 81.20 | 275.01 | 0.9228 |
| 2.2 | 29.61 | 17.77 | 100.54 | 900.40 | 0.9653 |
| 2.5 | 29.68 | 17.81 | 69.40 | 496.77 | 0.9385 |
| 2.9 | 28.82 | 17.29 | 73.28 | 525.61 | 0.9785 |
| 1.2 | 34.77 | 20.86 | 49.95 | 171.04 | 0.707 | 0.9913 |
| 1.5 | 33.77 | 20.26 | 62.81 | 277.65 | 0.757 | 0.9833 |
| 1.7 | 30.29 | 18.18 | 74.19 | 1000 | 0.389 | 0.9526 |
| 2.0 | 31.89 | 19.13 | 55.89 | 557.66 | 0.496 | 0.9944 |
| 2.2 | 29.61 | 17.77 | 88.50 | 1000 | 0.786 | 0.9855 |
| 2.5 | 29.68 | 17.81 | 43.42 | 1000 | 0.613 | 0.9858 |
| 2.9 | 28.82 | 17.29 | 61.48 | 633.92 | 0.852 | 0.9827 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, B.; Lu, A.; Zhang, N. Settlement Analysis of Fractional-Order Generalised Kelvin Viscoelastic Foundation under Distributed Loads. Appl. Sci. 2023, 13, 648. https://doi.org/10.3390/app13010648
Huang B, Lu A, Zhang N. Settlement Analysis of Fractional-Order Generalised Kelvin Viscoelastic Foundation under Distributed Loads. Applied Sciences. 2023; 13(1):648. https://doi.org/10.3390/app13010648
Chicago/Turabian StyleHuang, Bingcheng, Aizhong Lu, and Ning Zhang. 2023. "Settlement Analysis of Fractional-Order Generalised Kelvin Viscoelastic Foundation under Distributed Loads" Applied Sciences 13, no. 1: 648. https://doi.org/10.3390/app13010648