
Toward Improving the Reliability of Discrete Movement Recognition of sEMG Signals

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature Review
3. Methods
3.1. Dataset
3.2. Signal Processing and Feature Extraction
- RMS
- WLwhere j is the column; N is the number of observations in the current window; and represents the data point.
3.3. Evaluation
4. Proposed Methods
4.1. GMM Classifier with a Reject Option
4.2. GMM-kNN Fusion with a Reject Option
- LDA-R(LDA with majority voting and a reject option). LDA-R is an extension to LDA. For each observation in test samples, the conventional LDA will assign a class label to it. Unlike the study in [24], a majority voting is performed to the series of class labels. The percentages of observations that fall into each class are obtained. Thresholding is performed on the maximum percentages. Additionally, for the one that is higher than the threshold, the corresponding class label will be assigned to it. Otherwise, the prediction will be rejected.
- GMM-R (GMM with a reject option). Since the proposed classifier is built on a GMM-R classifier, the effectiveness of the proposed algorithm will be compared with the GMM-R classifier.
- KNN-R (kNN with a reject option). Similar to LDA-R and GMM-R, kNN-R can reject a low-reliability decision. Although high computational requirements may prevent real-time application when the number of classes is large, its high classification accuracy is still attractive.
- GK-R (GMM and kNN fusion with a reject option). There are two parameters in the GK-R classifier; the parameters are tuned, and the performance of GK-R for different parameters will be presented.
5. Results
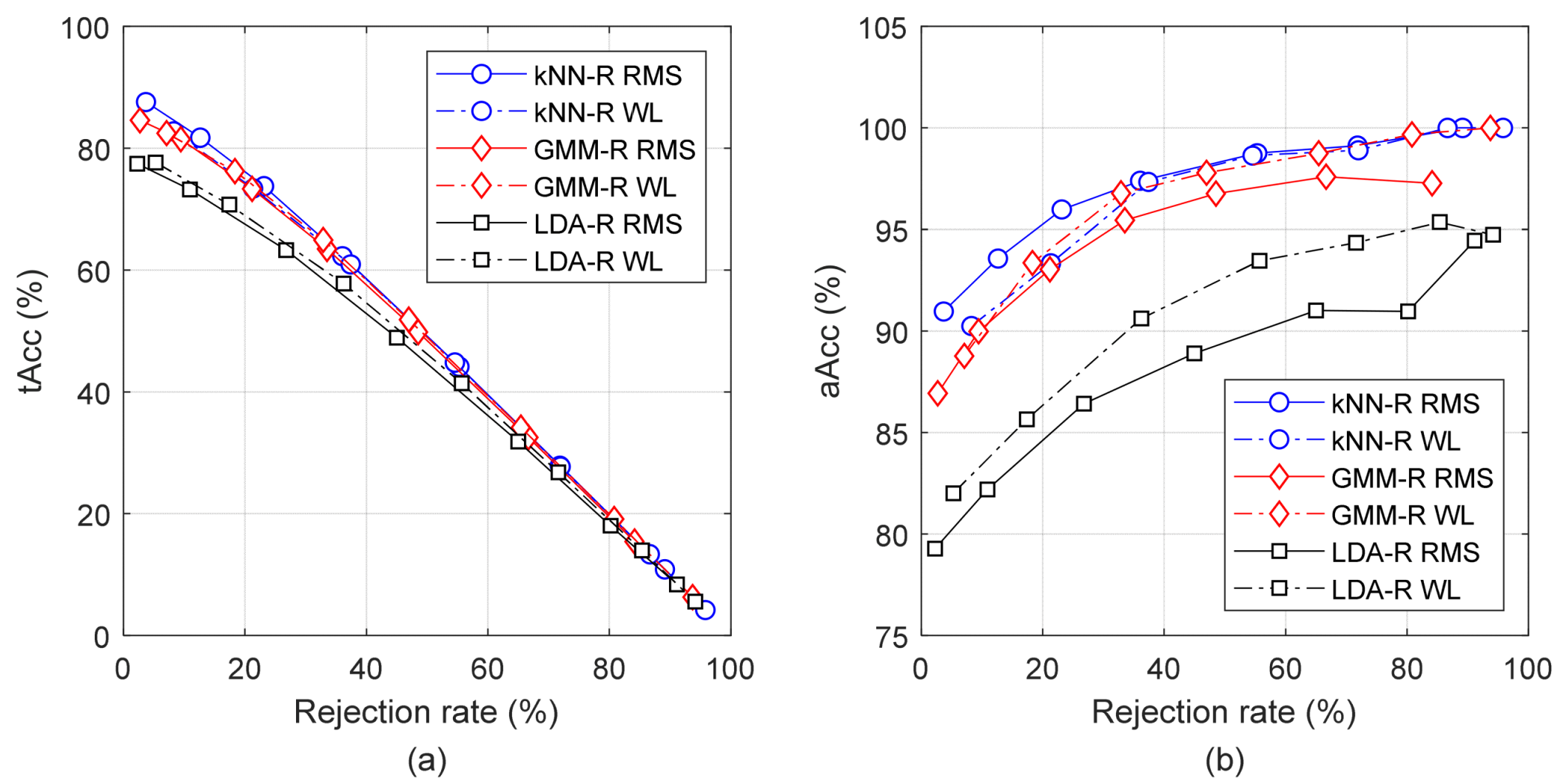
5.1. Classifiers with a Reject Option
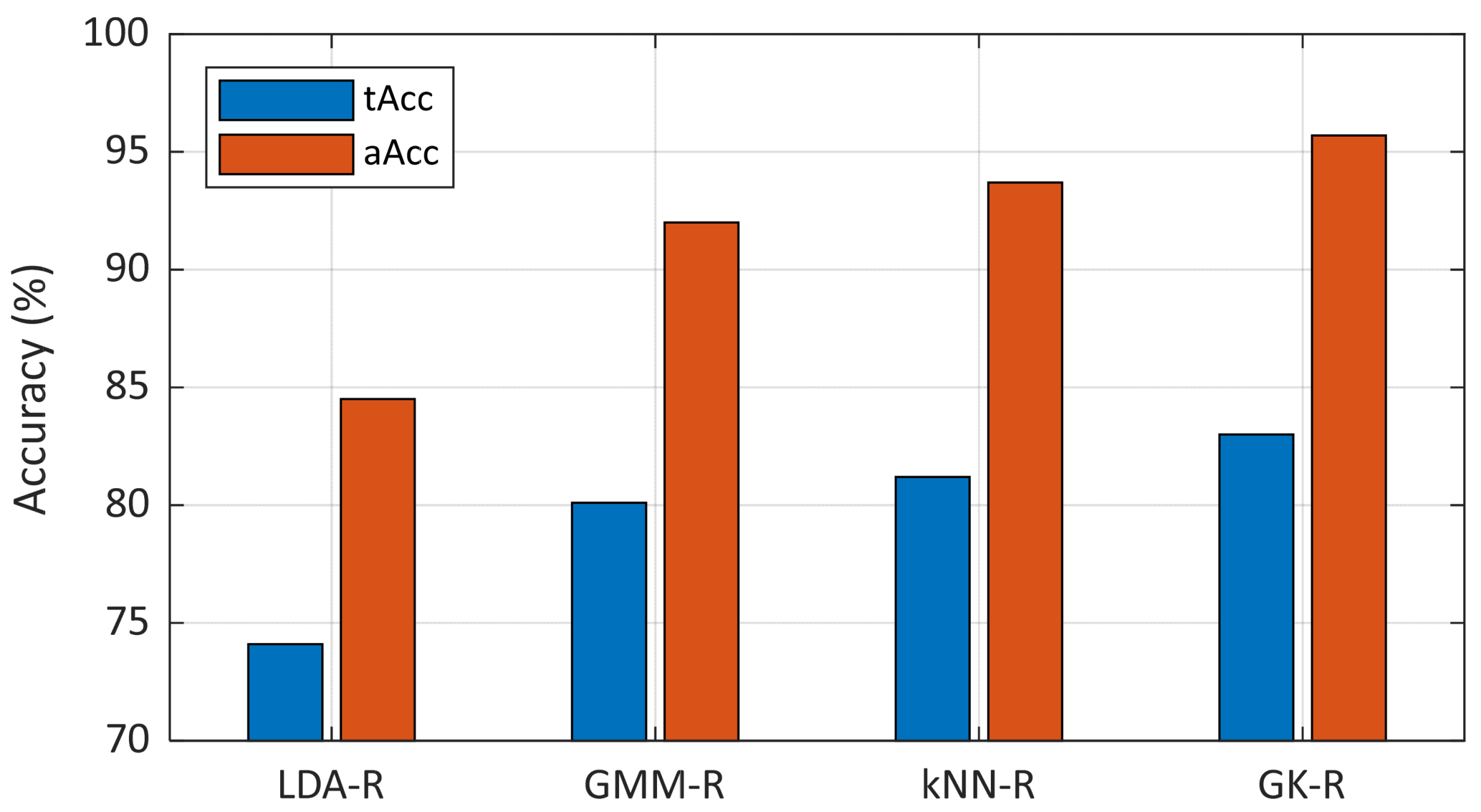
5.2. Performance of Proposed Classifier on Trained Movements
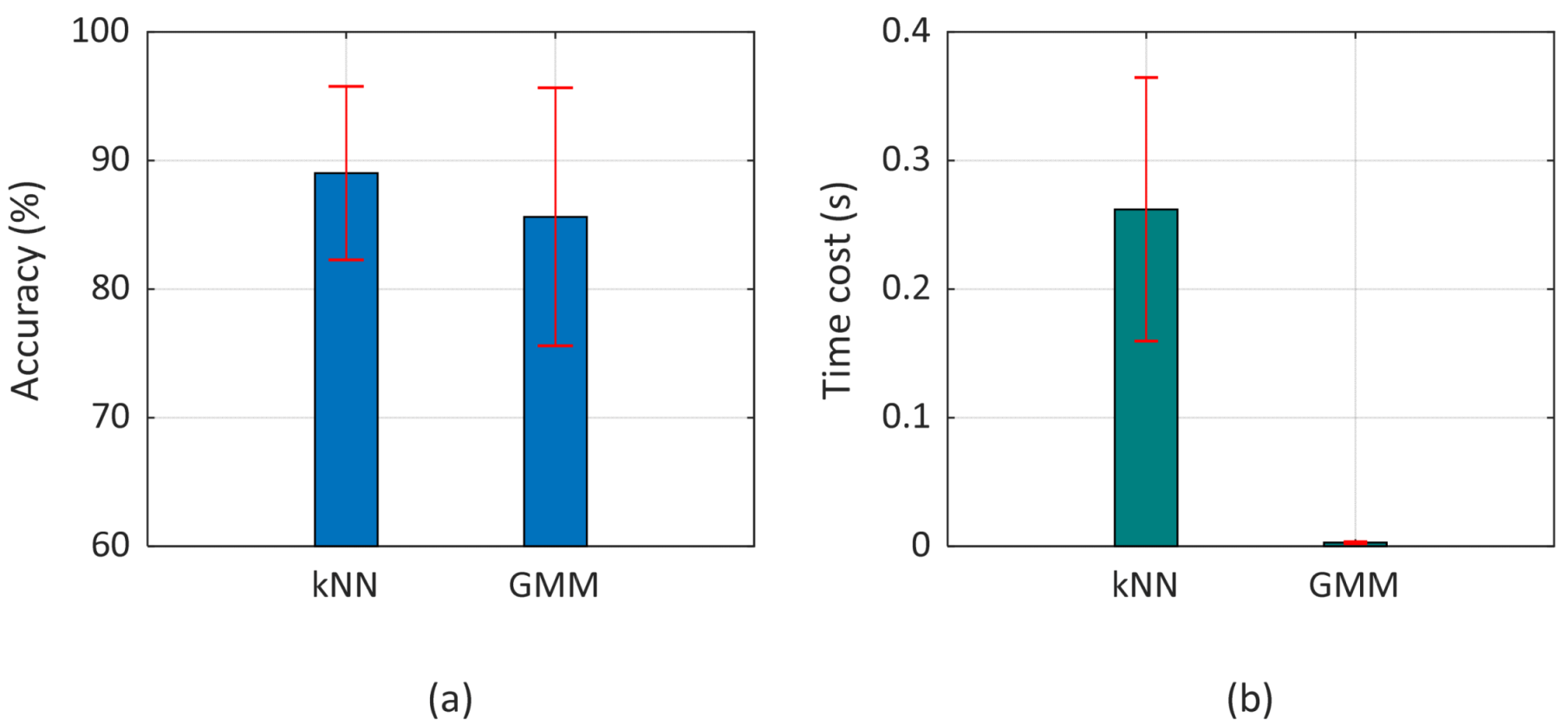
5.3. Time Cost
5.4. Performance of Proposed Classifier on Untrained Movements
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Phinyomark, A.; Quaine, F.; Charbonnier, S.; Serviere, C.; Tarpin-Bernard, F.; Laurillau, Y. EMG feature evaluation for improving myoelectric pattern recognition robustness. Expert. Syst. Appl. 2013, 40, 4832–4840. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert. Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Phinyomark, A.; Limsakul, C.; Phukpattaranont, P. A novel feature extraction for robust EMG pattern recognition. J. Comput. 2009, 1, 71–82. [Google Scholar]
- Parajuli, N.; Sreenivasan, N.; Bifulco, P.; Cesarelli, M.; Gargiulo, G.D. Real-Time EMG Based Pattern Recognition Control for Hand Prostheses: A Review on Existing Methods, Challenges and Future Implementation. Sensors 2019, 19, 4596. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.; Yin, K.; Fei, F.; Zhang, K. Surface electromyography–based hand movement recognition using the Gaussian mixture model, multilayer perceptron, and AdaBoost method. Int. J. Distri. Sens. Netw. 2019, 15, 1–13. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, S.; Yin, K.; Fei, F.; Zhang, K. SEMG Based Wrist Movement Recognition with Portable Sensing Device. In Proceedings of the 1st IEEE International Conference on Micro/Nano Sensors for AI, Healthcare, and Robotics 2018, Shenzhen, China, 5–7 December 2018; pp. 49–54. [Google Scholar]
- Yu, Z.; Zhao, J.; Wang, Y.; He, L.; Wang, S. Surface EMG-Based Instantaneous Hand Gesture Recognition Using Convolutional Neural Network with the Transfer Learning Method. Sensors 2021, 21, 2540. [Google Scholar] [CrossRef]
- Gu, Y.; Yang, D.; Qi, H.; Wei, Y.; Hong, L. Robust EMG pattern recognition in the presence of confounding factors: Features, classifiers and adaptive learning. Expert. Syst. Appl. 2017, 96, 208–217. [Google Scholar] [CrossRef]
- Jiang, N.; Muceli, S.; Graimann, B.; Farina, D. Effect of arm position on the prediction of kinematics from EMG in amputees. Med. Biol. Eng. Comput. 2013, 51, 143–151. [Google Scholar] [CrossRef]
- Young, A.J.; Hargrove, L.J.; Kuiken, T.A. Improving myoelectric pattern recognition robustness to electrode shift by changing interelectrode distance and electrode configuration. IEEE Trans. Biomed. Eng. 2012, 59, 645–652. [Google Scholar] [CrossRef] [Green Version]
- Campbell, E.; Phinyomark, A.; Scheme, E. Current Trends and Confounding Factors in Myoelectric Control: Limb Position and Contraction Intensity. Sensors 2020, 20, 1613. [Google Scholar] [CrossRef] [Green Version]
- Coenen, L.; Abdullah, A.K.A.; Guns, T. Probability of default estimation, with a reject option. In Proceedings of the IEEE 7th International Conference on Data Science and Advanced Analytics, Sydney, NSW, Australia, 6–9 October 2020; pp. 439–448. [Google Scholar]
- Chow, C.K. On optimum recognition error and reject tradeoff. IEEE Trans. Inf. Theory 1970, 16, 41–46. [Google Scholar] [CrossRef] [Green Version]
- Hendrickx, K.; Perini, L.; Dries, V.; Meert, W.; Davis, J. Machine Learning with a Reject Option: A survey. arXiv 2021, arXiv:2107.11277. [Google Scholar] [CrossRef]
- Simao, M.; Mendes, N.; Gibaru, O.; Neto, P. A Review on Electromyography Decoding and Pattern Recognition for Human-Machine Interaction. IEEE Access 2019, 7, 39564–39582. [Google Scholar] [CrossRef]
- Li, X.; Chen, S.; Zhang, H.; Samuel, O.W.; Wang, H.; Fang, P.; Zhang, X.; Li, G. Towards reducing the impacts of unwanted movements on identification of motion intentions. J. Electromyogr. Kinesiol. 2016, 28, 90–98. [Google Scholar] [CrossRef] [PubMed]
- Scheme, E.J.; Englehart, K.B.; Hudgins, B.S. Selective Classification for Improved Robustness of Myoelectric Control Under Nonideal Conditions. IEEE Trans. Biomed. Eng. 2011, 58, 1698–1705. [Google Scholar] [CrossRef]
- Liu, Y.H.; Huang, H.P. Towards a high-stability EMG recognition system for prosthesis control: A one-class classification based non-target EMG pattern filtering scheme. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics 2009, San Antonio, TX, USA, 11–14 October 2009; pp. 4752–4757. [Google Scholar]
- Chow, C.K. An optimum character recognition system using decision functions. IRE Trans. Electron. Comput. 1957, 6, 247–254. [Google Scholar] [CrossRef]
- Bakis, R.; Herbst, N.M.; Nagy, G. An Experimental Study of Machine Recognition of Hand-Printed Numerals. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 119–132. [Google Scholar] [CrossRef] [Green Version]
- Kotropoulos, C.; Arce, G.R. Linear Classifier with Reject Option for the Detection of Vocal Fold Paralysis and Vocal Fold Edema. EURASIP J. Adv. Signal Process. 2009, 2009, 203790. [Google Scholar] [CrossRef] [Green Version]
- Zou, C.; Zheng, E.H.; Xu, H.W.; Chen, L. Cost-sensitive Multi-class SVM with Reject Option: A Method for Steam Turbine Generator Fault Diagnosis. Int. J. Comput. Theory Eng. 2011, 3, 77–83. [Google Scholar] [CrossRef]
- Hargrove, L.J.; Scheme, E.J.; Englehart, K.B.; Hudgins, B.S. Multiple Binary Classifications via Linear Discriminant Analysis for Improved Controllability of a Powered Prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 49–57. [Google Scholar] [CrossRef]
- Scheme, E.J.; Hudgins, B.S.; Englehart, K.B. Confidence-based rejection for improved pattern recognition myoelectric control. IEEE Trans. Biomed. Eng. 2013, 60, 1563–1570. [Google Scholar] [CrossRef]
- Menon, R.; Caterina, G.D.; Lakany, H.; Petropoulakis, L.; Conway, B.A.; Soraghan, J.J. Automatic misclassification rejection for LDA classifier using ROC curves. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar]
- Stefano, C.D.; Sansone, C.; Vento, M. To reject or not to reject: That is the question-an answer in case of neural classifiers. IEEE Trans. Syst. Man Cybern. Part C 2000, 30, 84–94. [Google Scholar] [CrossRef]
- Sebastian, A.; Peter, M.G.; Ning, J.; Bernhard, G.; Liliana, P.; Dario, F. Self-correcting pattern recognition system of surface EMG signals for upper limb prosthesis control. IEEE Trans. Biomed. Eng. 2014, 61, 1167. [Google Scholar]
- Masana, M.; Ruiz, I.; Serrat, J.; Joost, V.; Lopez, A.M. Metric Learning for Novelty and Anomaly Detection. arXiv, 2018; arXiv:1808.05492.preprint. [Google Scholar]
- Mohseni, S.; Pitale, M.; Yadawa, J.; Wang, Z. Self-Supervised Learning for Generalizable Out-of-Distribution Detection. In Proceedings of the AAAI Conference on Artificial Intelligence 2020, Palo Alto, CA, USA, 7–12 February 2020; Volume 34, pp. 5216–5223. [Google Scholar]
- Lam, L.; Suen, S.Y. Application of Majority Voting to Pattern Recognition: An Analysis of Its Behavior and Performance. IEEE Trans. Syst. Man Cybern.-Part A Syst. Hum. 1997, 27, 553–568. [Google Scholar] [CrossRef] [Green Version]
- Tumer, K.; Ghosh, J. Analysis of decision boundaries in linearly combined neural classifiers. Pattern Recogn. 1996, 29, 341–348. [Google Scholar] [CrossRef] [Green Version]
- Roli, F.; Fumera, G.; Vernazza, G. Analysis of Error-Reject Trade-off in Linearly Combined Classifiers. Pattern Recogn. 2004, 37, 1245–1265. [Google Scholar]
- Ding, Q.; Zhao, X.; Han, J.; Bu, C.; Wu, C. Adaptive Hybrid Classifier for Myoelectric Pattern Recognition Against the Interferences of Outlier Motion, Muscle Fatigue, and Electrode Doffing. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1071–1080. [Google Scholar] [CrossRef]
- Wu, Q.; Jia, C.; Chen, W. A Novel Classification-Rejection Sphere SVMs for Multi-class Classification Problems. In Proceedings of the Third International Conference on Natural Computation, Haikou, China, 24–27 August 2007; pp. 34–38. [Google Scholar]
- Atzori, M.; Gijsberts, A.; Castellini, C.; Caputo, B.; Hager, A.G.M.; Elsig, S.; Giatsidis, G.; Bassetto, F.; Müller, H. Electromyography data for non-invasive naturally-controlled robotic hand prostheses. Sci. Data 2014, 1, 605–610. [Google Scholar] [CrossRef] [Green Version]
- Atzori, M.; Gijsberts, A.; Kuzborskij, I.; Elsig, S.; Hager, A.G.; Deriaz, O.; Castellini, C.; Muller, H.; Caputo, B. Characterization of a benchmark database for myoelectric movement classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 73–83. [Google Scholar] [CrossRef]
- Li, Z.; Wang, B.; Yang, C.; Xie, Q.; CY, S. Boosting-based EMG patterns classification scheme for robustness enhancement. IEEE J. Biomed. Health Inform. 2013, 17, 545–552. [Google Scholar] [CrossRef]
- Atzori, M.; Gijsberts, A.; Heynen, S.; Hager, A.G.M. Building the Ninapro database: A resource for the biorobotics community. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Rome, Italy, 24–27 June 2012; pp. 1258–1265. [Google Scholar]
- Scheme, E.; Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J. Rehabil. Res. Dev. 2011, 48, 643–659. [Google Scholar] [CrossRef]
- Nadeem, M.S.A.; Zucker, J.D.; Hanczar, B. Accuracy-Rejection Curves (ARCs) for Comparing Classification Methods with a Reject Option. In Proceedings of the Third International Workshop on Machine Learning in Systems Biology, Ljubljana, Slovenia, 5–6 September 2009; pp. 65–81. [Google Scholar]
- Huang, Y.; Englehart, K.B.; Hudgins, B.; Chan, A.D.C. A Gaussian mixture model based classification scheme for myoelectric control of powered upper limb prostheses. IEEE Trans. Biomed. Eng. 2005, 52, 1801–1811. [Google Scholar] [CrossRef] [PubMed]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning with Applications in R; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Toek, I. An Experiment with the Edited Nearest-Neighbor Rule. IEEE Trans. Syst. Man Cybern. 1976, SMC-6, 448–452. [Google Scholar] [CrossRef]
- Kim, K.S.; Choi, H.H.; Moon, C.S.; Mun, C.W. Comparison of k-nearest neighbor, quadratic discriminant and linear discriminant analysis in classification of electromyogram signals based on the wrist-motion directions. Curr. Appl. Phys. 2011, 11, 740–745. [Google Scholar] [CrossRef]
- Narayan, Y. SEMG signal classification using KNN classifier with FD and TFD features. Mater. Today Proc. 2021, 37, 3219–3225. [Google Scholar] [CrossRef]
- Englehart, K.; Hudgins, B.; Chan, A.D.C. Continuous multifunction myoelectric control using pattern recognition. Technol. Disabil. 2003, 15, 95–103. [Google Scholar] [CrossRef]
- Graupe, D.; Salahi, J.; Kohn, K.H. Multifunctional prosthesis and orthosis control via microcomputer identification of temporal pattern differences in single-site myoelectric signals. J. Biomed. Eng. 1982, 4, 17–22. [Google Scholar] [CrossRef]
- Graupe, D.; Salahi, J.; Zhang, D. Stochastic analysis of myoelectric temporal signatures for multifunctional single-site activation of prostheses and orthoses. J. Biomed. Eng. 1985, 7, 18–29. [Google Scholar] [CrossRef]
- Hefftner, G.; Zucchini, W.; Jaros, G.G. The electromyogram (EMG) as a control signal for functional neuromuscular stimulation—Part I: Autoregressive modeling as a means of EMG signature discrimination. IEEE Trans. Biomed. Eng. 1988, 35, 230–237. [Google Scholar] [CrossRef]
- Farrell, T.R.; Weir, R.F. The Optimal Controller Delay for Myoelectric Prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 111–118. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Fei, F.; Yin, K. Toward Improving the Reliability of Discrete Movement Recognition of sEMG Signals. Appl. Sci. 2022, 12, 3374. https://doi.org/10.3390/app12073374
Zhou S, Fei F, Yin K. Toward Improving the Reliability of Discrete Movement Recognition of sEMG Signals. Applied Sciences. 2022; 12(7):3374. https://doi.org/10.3390/app12073374
Chicago/Turabian StyleZhou, Shengli, Fei Fei, and Kuiying Yin. 2022. "Toward Improving the Reliability of Discrete Movement Recognition of sEMG Signals" Applied Sciences 12, no. 7: 3374. https://doi.org/10.3390/app12073374