
Design of a Novel Long-Reach Cable-Driven Hyper-Redundant Snake-like Manipulator for Inspection and Maintenance

 ,
,  , , , ,
, , , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design Requirements
- inspecting extended environments;
- operating in harsh environments with temperatures up to 100 C;
- being capable of entering areas through apertures as small as ;
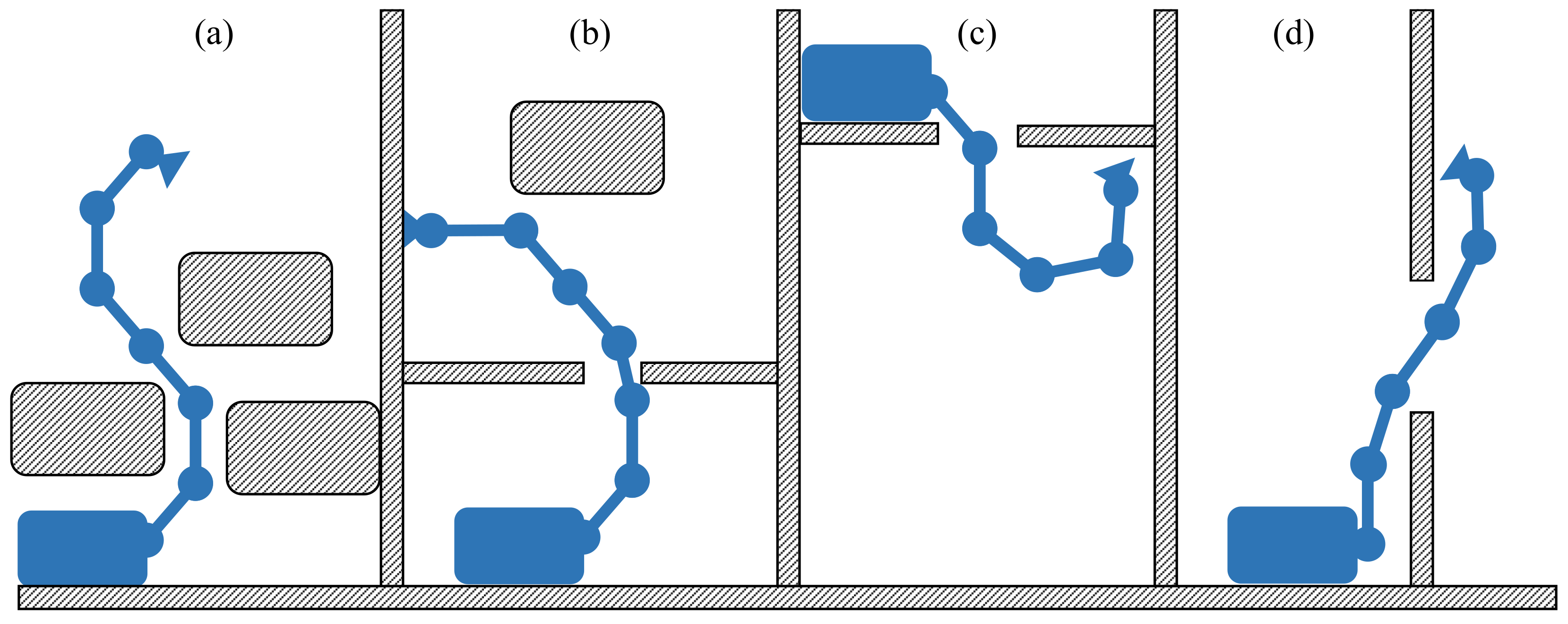
- moving in narrow cluttered environments characterised by corners and obstacles;
- carrying on-board instruments such as cameras, non-destructive testing devices, or other tools required to perform customised inspection tasks;
- remaining compact (within a volume) in its parking configuration.
2.2. Design Overview
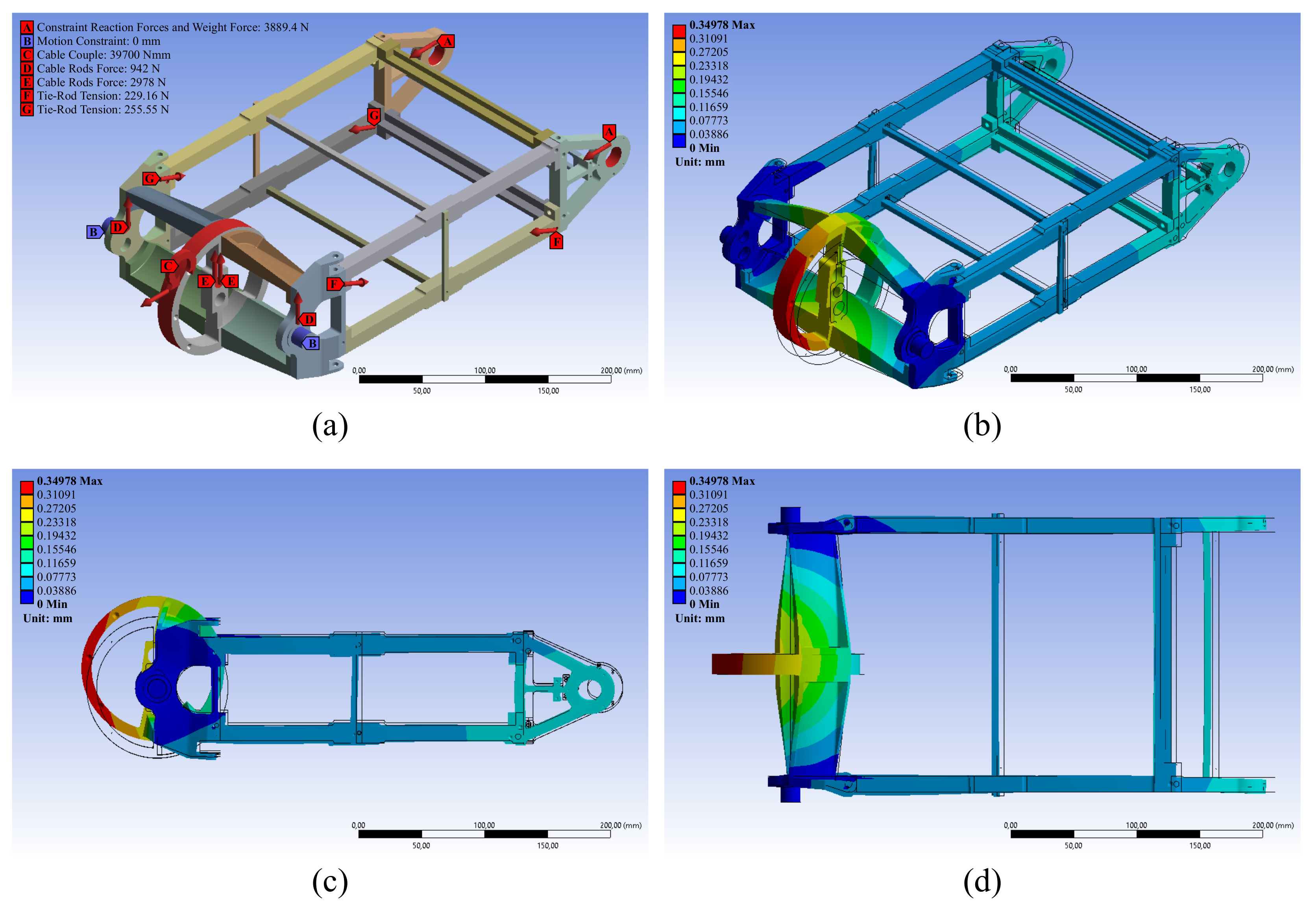
2.3. Mechanical Design
2.3.1. Robotic Arm
2.3.2. Actuation Box and Robot Base
2.3.3. End-Effector
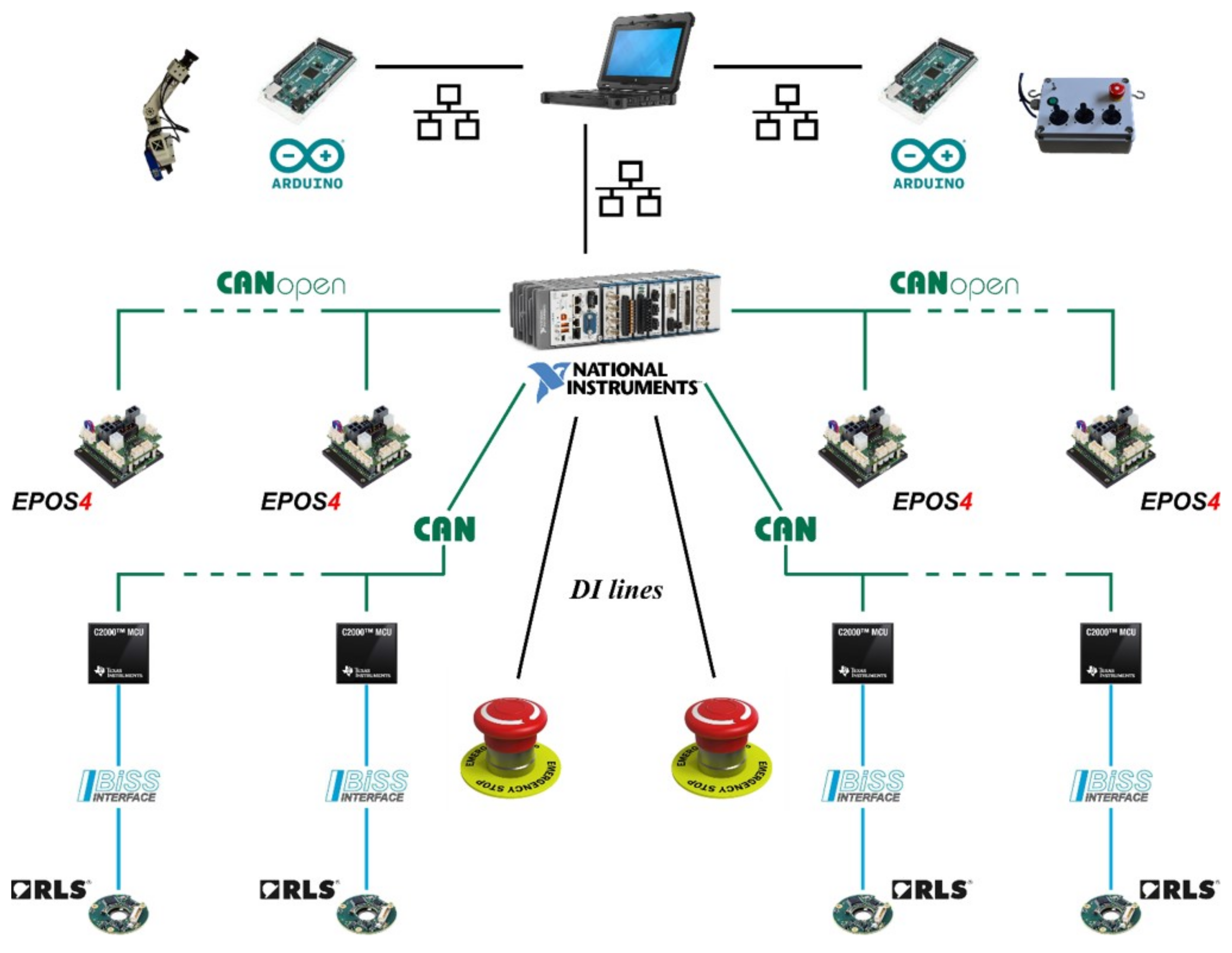
2.4. Electronic Architecture
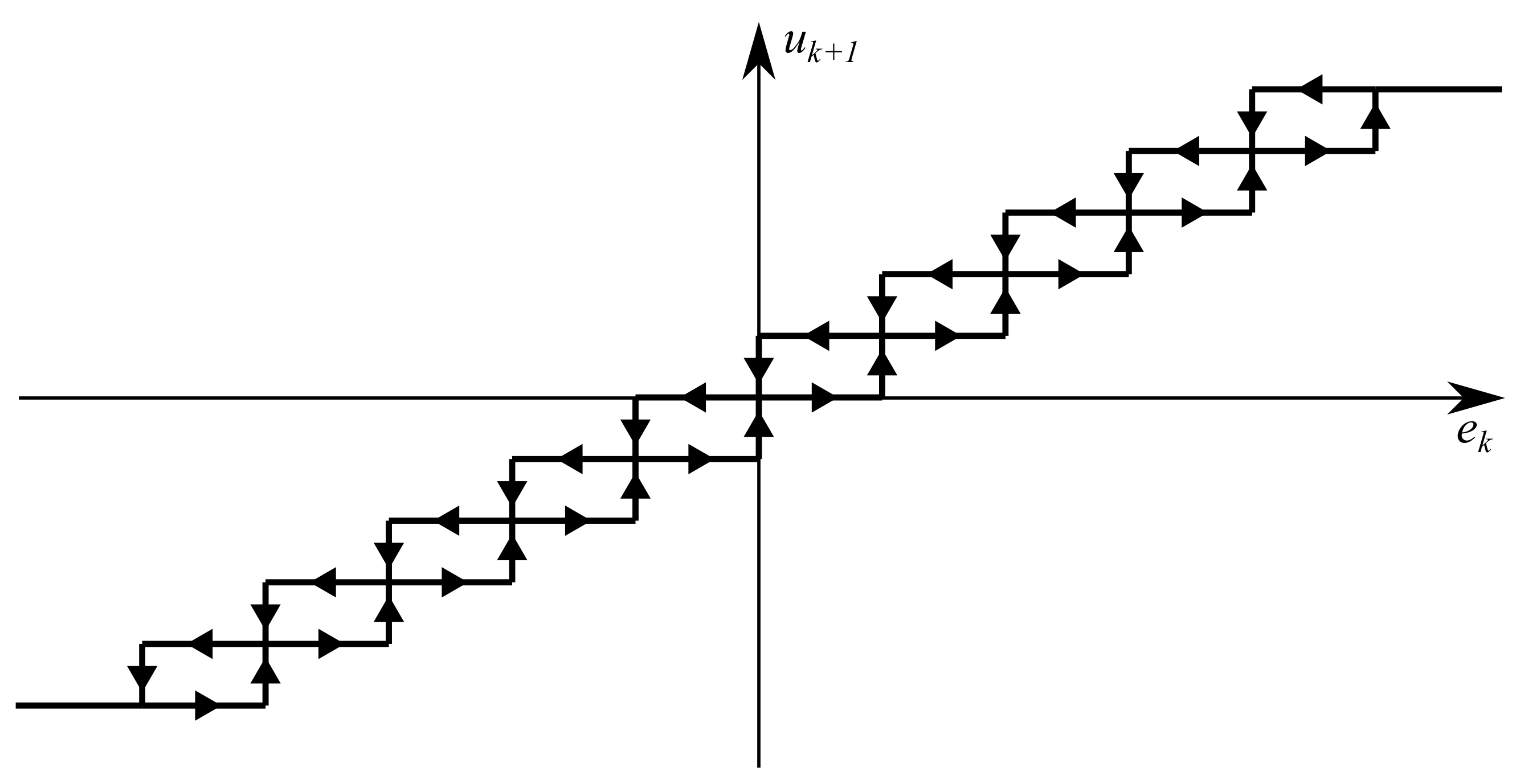
2.5. Control Strategy
| Algorithm 1: Control Algorithm |
|
2.6. Simulation and Experiment
3. Results
- mean value: m;
- median value: m;
- standard deviation: m.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| SLIM | Snake-Like manipulator for Inspection and Maintenance operations |
| DOFs | Degrees Of Freedom |
| TCP | Tool Centre Point |
References
- Pistone, A.; Canali, C.; Gloriani, C.; Leggieri, S.; Guardiani, P.; Caldwell, D. Reconfigurable inspection robot for industrial applications. Procedia Manuf. 2019, 38, 597–604. [Google Scholar] [CrossRef]
- Leggieri, S.; Canali, C.; Cannella, F.; Lee, J.; Caldwell, D.G. Preliminary Study on the Crawler Unit of a Novel Self-Reconfigurable Hybrid Platform for Inspection. In Proceedings of the 2021 20th International Conference on Advanced Robotics (ICAR), Ljubljana, Slovenia, 6–10 December 2021; pp. 77–82. [Google Scholar] [CrossRef]
- Martelli, S.; Mazzei, L.; Canali, C.; Guardiani, P.; Giunta, S.; Ghiazza, A.; Mondino, I.; Cannella, F.; Murino, V.; Del Bue, A. Deep Endoscope: Intelligent Duct Inspection for the Avionic Industry. IEEE Trans. Ind. Inform. 2018, 14, 1701–1711. [Google Scholar] [CrossRef]
- Guardiani, P.; Canali, C.; Pistone, A.; Leggieri, S.; Gloriani, C.; Rahman, N.; Cannella, F.; Caldwell, D. Novel Integrated Robotic System for Tiny Duct Inspection. Procedia Manuf. 2018, 17, 342–349. [Google Scholar] [CrossRef]
- Houlihan, B. Europe’s ageing infrastructure: Politics, finance and the environment. Util. Policy 1994, 4, 243–252. [Google Scholar] [CrossRef]
- Morimoto, R. Estimating the benefits of effectively and proactively maintaining infrastructure with the innovative Smart Infrastructure sensor system. Socio-Econ. Plan. Sci. 2010, 44, 247–257. [Google Scholar] [CrossRef]
- Chirikjian, G.S.; Burdick, J.W. An obstacle avoidance algorithm for hyper-redundant manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; pp. 625–631. [Google Scholar] [CrossRef] [Green Version]
- Hannan, M.W.; Walker, I.D. Analysis and initial experiments for a novel elephant’s trunk robot. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000) (Cat. No.00CH37113), Takamatsu, Japan, 31 October–5 November 2000; Volume 1, pp. 330–337. [Google Scholar] [CrossRef]
- Cieślak, R.; Morecki, A. Elephant trunk type elastic manipulator—A tool for bulk and liquid materials transportation. Robotica 1999, 17, 11–16. [Google Scholar] [CrossRef]
- Guglielmino, E.; Tsagarakis, N.; Caldwell, D.G. An octopus anatomy-inspired robotic arm. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3091–3096. [Google Scholar] [CrossRef]
- Hirose, S. Biologically Inspired Robots: Snake-like Locomotors and Manipulators; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Buckingham, R.O.; Graham, A.C. Dexterous manipulators for nuclear inspection and maintenance—Case study. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010; pp. 1–6. [Google Scholar] [CrossRef]
- HiBot. ACM-R5H. Available online: https://www.hibot.co.jp (accessed on 31 January 2022).
- Abidi, H.; Gerboni, G.; Brancadoro, M.; Fras, J.; Diodato, A.; Cianchetti, M.; Wurdemann, H.; Althoefer, K.; Menciassi, A. Highly dexterous 2-module soft robot for intra-organ navigation in minimally invasive surgery. Int. J. Med Robot. Comput. Assist. Surg. 2018, 14, e1875. [Google Scholar] [CrossRef] [PubMed]
- Simaan, N.; Xu, K.; Wei, W.; Kapoor, A.; Kazanzides, P.; Taylor, R.; Flint, P. Design and Integration of a Telerobotic System for Minimally Invasive Surgery of the Throat. Int. J. Robot. Res. 2009, 28, 1134–1153. [Google Scholar] [CrossRef] [PubMed]
- Pedemonte, N.; Rasheed, T.; Marquez-Gamez, D.; Long, P.; Hocquard, É.; Babin, F.; Fouché, C.; Caverot, G.; Girin, A.; Caro, S. Fastkit: A mobile cable-driven parallel robot for logistics. In Advances in Robotics Research: From Lab to Market; Springer: Berlin/Heidelberg, Germany, 2020; pp. 141–163. [Google Scholar] [CrossRef]
- Qian, S.; Zi, B.; Shang, W.-W.; Xu, Q.-S. A Review on Cable-driven Parallel Robots. Chin. J. Mech. Eng. 2018, 31, 1–11. [Google Scholar] [CrossRef]
- Buckingham, R.O.; Graham, A.C. Link Assembly for a Snake Like Robot Arm. U.S. Patent 7,543,518, 9 June 2009. [Google Scholar]
- Dong, X.; Raffles, M.; Cobos-Guzman, S.; Axinte, D.; Kell, J. A Novel Continuum Robot Using Twin-Pivot Compliant Joints: Design, Modeling, and Validation. J. Mech. Robot. 2015, 8, 021010. [Google Scholar] [CrossRef]
- Gargiulo, L.; Bayetti, P.; Bruno, V.; Hatchressian, J.C.; Hernandez, C.; Houry, M.; Keller, D.; Martins, J.P.; Measson, Y.; Perrot, Y.; et al. Operation of an ITER relevant inspection robot on Tore Supra tokamak. Fusion Eng. Des. 2009, 84, 220–223. [Google Scholar] [CrossRef]
- Endo, G.; Horigome, A.; Takata, A. Super Dragon: A 10-m-Long-Coupled Tendon-Driven Articulated Manipulator. IEEE Robot. Autom. Lett. 2019, 4, 934–941. [Google Scholar] [CrossRef]
- Marjaninejad, A.; Urbina-Meléndez, D.; Cohn, B.A.; Valero-Cuevas, F.J. Autonomous functional movements in a tendon-driven limb via limited experience. Nat. Mach. Intell. 2019, 1, 144–154. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laffranchi, M.; Boccardo, N.; Traverso, S.; Lombardi, L.; Canepa, M.; Lince, A.; Semprini, M.; Saglia, J.; Naceri, A.; Sacchetti, R.; et al. The Hannes hand prosthesis replicates the key biological properties of the human hand. Sci. Robot. 2020, 5, eabb0467. [Google Scholar] [CrossRef] [PubMed]
- Guardiani, P.; Ludovico, D.; Pistone, A.; Abidi, H.; Zaplana, I.; Lee, J.; Caldwell, D.G.; Canali, C. Design and Analysis of a Fully Actuated Cable-Driven Joint for Hyper-Redundant Robots With Optimal Cable Routing. J. Mech. Robot. 2021, 14, 021006. [Google Scholar] [CrossRef]
- Ludovico, D.; Guardiani, P.; Pistone, A.; Lee, J.; Cannella, F.; Caldwell, D.G.; Canali, C. Modeling Cable-Driven Joint Dynamics and Friction: A Bond-Graph Approach. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 7285–7291. [Google Scholar] [CrossRef]
- Coulibaly, J.B.; Chanut, M.A.; Lambert, S.; Nicot, F. Sliding cable modeling: An attempt at a unified formulation. Int. J. Solids Struct. 2018, 130, 1–10. [Google Scholar] [CrossRef]
- Miyasaka, M.; Matheson, J.; Lewis, A.; Hannaford, B. Measurement of the cable-pulley Coulomb and viscous friction for a cable-driven surgical robotic system. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 804–810. [Google Scholar] [CrossRef]
- Dwivedy, S.K.; Eberhard, P. Dynamic analysis of flexible manipulators, a literature review. Mech. Mach. Theory 2006, 41, 749–777. [Google Scholar] [CrossRef]
- Ludovico, D.; Pistone, A.; De Mari Casareto Dal Verme, L.; Guardiani, P.; Caldwell, D.G.; Canali, C. Static Elasticity Compensation via Recursive Artificial Neural Network for Long-Reach Cable-Driven Hyper-Redundant Manipulators. In Proceedings of the 2021 20th International Conference on Advanced Robotics (ICAR), Ljubljana, Slovenia, 6–10 December 2021; pp. 1116–1120. [Google Scholar] [CrossRef]
- Mahlin, M.; Wagner, R.L.; Dorsey, J.; Jones, T.C. Tendon-Actuated Lightweight In-Space MANipulator (TALISMAN) Hinge Joint Structural. In Proceedings of the ASCEND 2020, Virtual Event, 16–18 November 2020; p. 4251. [Google Scholar] [CrossRef]
- Khalil, W.; Dombre, E. Modeling, Identification and Control of Robots; Butterworth-Heinemann, Kogan Page Science: London, UK, 2004. [Google Scholar]
- Horigome, A.; Endo, G. Investigation of repetitive bending durability of synthetic fiber ropes. IEEE Robot. Autom. Lett. 2018, 3, 1779–1786. [Google Scholar] [CrossRef] [Green Version]
- Inc, Samson Rope Technology Samson Splicing Instructions. 2006. Available online: www.samsonrope.com (accessed on 23 March 2022).
- Mansard, N.; Khatib, O.; Kheddar, A. A unified approach to integrate unilateral constraints in the stack of tasks. IEEE Trans. Robot. 2009, 25, 670–685. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | [mm] | [rad] | [mm] | [rad] |
|---|---|---|---|---|
| Arm and Base | ||||
| 1 | 0 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | 350 | 0 | 0 | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 13 | 350 | 0 | 0 | |
| End-Effector | ||||
| 14 | 0 | 410 | ||
| 15 | 0 | 0 | ||
| Camera | ||||
| TCP | 212 | 0 | 0 | |
| Unit | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m | 2 | 2 | 1 | 1 | kg | ||||||||
| 109 | 109 | 108 | 108 | 109 | 109 | 109 | 109 | 105 | 105 | 112 | 112 | mm | |
| l | 350 | 350 | 350 | 350 | 350 | 350 | 350 | 350 | 350 | 350 | 350 | 350 | mm |
| r | 55 | 55 | 55 | 55 | 55 | 55 | 55 | 55 | 55 | 55 | 55 | 55 | mm |
| w | 228 | 228 | 222 | 222 | 222 | 222 | 214 | 214 | 211 | 211 | 209 | 209 | mm |
| h | 112 | 112 | 112 | 112 | 107 | 107 | 107 | 107 | 107 | 107 | 107 | 107 | mm |
| Steel | Zylon PBO | Unit | |
|---|---|---|---|
| Diameter | 3 | 3 | mm |
| Density | 38.5 | 6.5 | g/mm |
| Max load | 5.7 | 12.6 | kN |
| Max temperature | 1500 | 650 | C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Canali, C.; Pistone, A.; Ludovico, D.; Guardiani, P.; Gagliardi, R.; De Mari Casareto Dal Verme, L.; Sofia, G.; Caldwell, D.G. Design of a Novel Long-Reach Cable-Driven Hyper-Redundant Snake-like Manipulator for Inspection and Maintenance. Appl. Sci. 2022, 12, 3348. https://doi.org/10.3390/app12073348
Canali C, Pistone A, Ludovico D, Guardiani P, Gagliardi R, De Mari Casareto Dal Verme L, Sofia G, Caldwell DG. Design of a Novel Long-Reach Cable-Driven Hyper-Redundant Snake-like Manipulator for Inspection and Maintenance. Applied Sciences. 2022; 12(7):3348. https://doi.org/10.3390/app12073348
Chicago/Turabian StyleCanali, Carlo, Alessandro Pistone, Daniele Ludovico, Paolo Guardiani, Roberto Gagliardi, Lorenzo De Mari Casareto Dal Verme, Giuseppe Sofia, and Darwin G. Caldwell. 2022. "Design of a Novel Long-Reach Cable-Driven Hyper-Redundant Snake-like Manipulator for Inspection and Maintenance" Applied Sciences 12, no. 7: 3348. https://doi.org/10.3390/app12073348