
Dealing with Uncertainty in the MRCPSP/Max Using Discrete Differential Evolution and Entropy


Abstract
:1. Introduction
2. Coping with Uncertainty in Project Management
2.1. Problem Models
2.2. Understanding Uncertainty
2.3. A Resilient Approach to Uncertainty
3. Methods
| Algorithm 1: Repeat until all feasible instances are solved |
| Stage 1: Minimize Makespan (Target Makespan/makespan_I) Initialization Phase While i < population size (Np) Evaluate Mode Selection Rules (MSR) Evaluate Activity Priority Rules (APR) End Discrete Differential Evolution Algorithm End Stage 2: Determine Schedule’s Entropy (Upper Bound Makespan/makespan_II) Initialization Phase While i < population size (Np) Evaluate activity risk and set checkpoint frequency Determine Unfavorable events Determine Event Entropies End Compute Schedule Entropy End Stage 3: Maximize Robustness (Robustness Measure/makespan_III) Initialization Phase If makespan > makespan_II, then Reject initial solution End if While i < population size (Np) Evaluate Mode Selection Rules (MSR) Evaluate Activity Priority Rules (APR) End Discrete Differential Evolution Algorithm End End |
3.1. Discrete Differential Evolution Algorithm
3.2. Mutation
3.3. Crossover
3.4. Selection
4. Results and Discussion
4.1. Parameter Settings
4.2. Computational Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alipouri, Y.; Sebt, M.H.; Ardeshir, A.; Chan, W.T. Solving the FS-RCPSP with hyper-heuristics: A policy-driven approach. J. Oper. Res. Soc. 2019, 70, 403–419. [Google Scholar] [CrossRef]
- Khodakarami, V.; Fenton, N.; Neil, M. Project Scheduling: Improved approach to incorporate uncertainty using Bayesian Networks. Proj. Manag. J. 2007, 38, 39–49. [Google Scholar] [CrossRef]
- Rezakhani, P. Project scheduling and performance prediction: A fuzzy-Bayesian network approach. In Engineering, Construction and Architectural Management; Emerald Publishing Limited Publisher: Bingley, UK, 2021. [Google Scholar]
- Ballestín, F. When it is worthwhile to work with the stochastic RCPSP? J. Sched. 2007, 10, 153–166. [Google Scholar] [CrossRef]
- Klerides, E.; Hadjiconstantinou, E. A decomposition-based stochastic programming approach for the project scheduling problem under time/cost trade-off settings and uncertain durations. Comput. Oper. Res. 2010, 37, 2131–2140. [Google Scholar] [CrossRef]
- Mokhtari, H.; Aghaie, A.; Rahimi, J.; Mozdgir, A. Project time–cost trade-off scheduling: A hybrid optimization approach. Int. J. Adv. Manuf. Technol. 2010, 50, 811–822. [Google Scholar] [CrossRef]
- Lambrechts, O.; Demeulemeester, E.; Herroelen, W. Time slack-based techniques for robust project scheduling subject to resource uncertainty. Ann. Oper. Res. 2011, 186, 443–464. [Google Scholar] [CrossRef]
- Moradi, H.; Shadrokh, S. A robust scheduling for the multimode project scheduling problem with a given deadline under uncertainty of activity duration. Int. J. Prod. Res. 2019, 57, 3138–3167. [Google Scholar] [CrossRef]
- Xiong, J.; Chen, Y.; Zhou, Z. Resilience analysis for project scheduling with renewable resource constraints and uncertain activity durations. J. Ind. Manag. Optim. 2016, 12, 719. [Google Scholar]
- Milat, M.; Knezic, S.; Sedlar, J. A new surrogate measure for a resilient approach to construction scheduling. Procedia Comput. Sci. 2021, 181, 468–476. [Google Scholar] [CrossRef]
- Askarifard, M.; Abbasianjahromi, H.; Sepehri, M.; Zeighami, E. A robust multi-objective optimization model for project scheduling considering risk and sustainable development criteria. Environ. Dev. Sustain. 2021, 23, 11494–11524. [Google Scholar] [CrossRef]
- Rahman, M.H.F.; Chakrabortty, R.K.; Ryan, M.J. Managing Uncertainty and Disruptions in Resource-Constrained Project Scheduling Problems: A Real-Time Reactive Approach. IEEE Access 2021, 9, 45562–45586. [Google Scholar] [CrossRef]
- Van de Vonder, S.; Demeulemeester, E.; Herroelen, W.; Leus, R. The use of buffers in project management: The trade-off between stability and makespan. Int. J. Prod. Econ. 2005, 97, 227–240. [Google Scholar] [CrossRef] [Green Version]
- Golab, A.; Gooya, E.; Falou, A.; Cabon, M. Review of conventional metaheuristic techniques for resource-constrained project scheduling problem. J. Proj. Manag. 2022, 7, 95–110. [Google Scholar] [CrossRef]
- Habibi, F.; Barzinpour, F.; Sadjadi, S. Resource-constrained project scheduling problem: Review of past and recent developments. J. Proj. Manag. 2018, 3, 55–88. [Google Scholar] [CrossRef]
- Hazır, Ö.; Ulusoy, G. A classification and review of approaches and methods for modeling uncertainty in projects. Int. J. Prod. Econ. 2020, 223, 107522. [Google Scholar] [CrossRef]
- Hartmann, S.; Briskorn, D. An Updated Survey of Variants and Extensions of the Resource-Constrained Project Scheduling Problem. Eur. J. Oper. Res. 2022, 297, 1–14. [Google Scholar] [CrossRef]
- Nansheng, P.; Qichen, M. Resource allocation in robust scheduling. J. Oper. Res. Soc. 2022, 1–18. [Google Scholar] [CrossRef]
- Bruni, M.E.; Pugliese, L.D.P.; Beraldi, P.; Guerriero, F. An adjustable robust optimization model for the resource-constrained project scheduling problem with uncertain activity durations. Omega 2017, 71, 66–84. [Google Scholar] [CrossRef]
- Bold, M.; Goerigk, M. A compact reformulation of the two-stage robust resource-constrained project scheduling problem. Comput. Oper. Res. 2021, 130, 105232. [Google Scholar] [CrossRef]
- Wang, Z.; Ng, T.S.; Pang, C.K. Minimizing activity exposures in project scheduling under uncertainty. Expert Syst. Appl. 2021, 173, 114635. [Google Scholar] [CrossRef]
- Kreter, S.; Schutt, A.; Stuckey, P.J.; Zimmermann, J. Mixed-integer linear programming and constraint programming formulations for solving resource availability cost problems. Eur. J. Oper. Res. 2018, 266, 472–486. [Google Scholar] [CrossRef]
- Li, H.; Xiong, L.; Liu, Y.; Li, H. An effective genetic algorithm for the resource levelling problem with generalised precedence relations. Int. J. Prod. Res. 2018, 56, 2054–2075. [Google Scholar] [CrossRef]
- Mahalleh, M.K.K.; Ashjari, B.; Yousefi, F.; Saberi, M. A robust solution to resource-constraint project scheduling problem. Int. J. Fuzzy Log. Intell. Syst. 2017, 17, 221–227. [Google Scholar] [CrossRef] [Green Version]
- Davari, M.; Demeulemeester, E. The proactive and reactive resource-constrained project scheduling problem. J. Sched. 2019, 22, 211–237. [Google Scholar] [CrossRef]
- Chen, A.H.L.; Liang, Y.C.; Padilla, J.D. An entropy-based upper bound methodology for robust predictive multimode RCPSP schedules. Entropy 2014, 16, 5032–5067. [Google Scholar] [CrossRef] [Green Version]
- Chen, A.H.L.; Liang, Y.C.; Padilla, J.D. Using discrete differential evolution and Entropy to solve the MRCPSP. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation (CEC), Donostia, Spain, 5–8 June 2017; pp. 2437–2442. [Google Scholar]
- Elmaghraby, S.E. Activity Networks: Project Planning and Control by Network Models; John Wiley & Sons: Hoboken, NJ, USA, 1977. [Google Scholar]
- Bartusch, M.; Möhring, R.H.; Radermacher, F.J. Scheduling project networks with resource constraints and time windows. Ann. Oper. Res. 1988, 16, 199–240. [Google Scholar] [CrossRef]
- Bushuyev, S.D.; Sochnev, S.V. Entropy measurement as a project control tool. Int. J. Proj. Manag. 1999, 17, 343–350. [Google Scholar] [CrossRef]
- Asllani, A.; Ettkin, L. An entropy-based approach for measuring project uncertainty. Acad. Inf. Manag. Sci. J. 2007, 10, 31–45. [Google Scholar]
- Song, H.; Wu, D.; Li, M.; Cai, C.; Li, J. An entropy based approach for software risk assessment: A perspective of trustworthiness enhancement. In Proceedings of the 2nd International Conference on Software Engineering and Data Mining, Chengdu, China, 23–25 June 2010; pp. 575–578. [Google Scholar]
- Tseng, C.C.; Ko, P.W. Measuring schedule uncertainty for a stochastic resource-constrained project using scenario-based approach with utility-entropy decision model. J. Ind. Prod. Eng. 2016, 33, 558–567. [Google Scholar] [CrossRef]
- Chenarani, A.; Druzhinin, E.A. A quantitative measure for evaluating project uncertainty under variation and risk effects. Eng. Technol. Appl. Sci. Res. 2017, 7, 2083–2088. [Google Scholar] [CrossRef]
- Christodoulou, S.E. Entropy-based heuristic for resource-constrained project scheduling. J. Comput. Civ. Eng. 2017, 31, 04016068. [Google Scholar] [CrossRef]
- Qiao, J.; Li, Y. Resource leveling using normalized Entropy and relative Entropy. Autom. Constr. 2018, 87, 263–272. [Google Scholar] [CrossRef]
- Vanhoucke, M.; Batselier, J. A statistical method for estimating activity uncertainty parameters to improve project forecasting. Entropy 2019, 21, 952. [Google Scholar] [CrossRef] [Green Version]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Norris, F.H.; Stevens, S.P.; Pfefferbaum, B.; Wyche, K.F.; Pfefferbaum, R.L. Community resilience as a metaphor, theory, set of capacities, and strategy for disaster readiness. Am. J. Community Psychol. 2008, 41, 127–150. [Google Scholar] [CrossRef]
- Al-Fawzan, M.A.; Haouari, M. A bi-objective model for robust resource-constrained project scheduling. Int. J. Prod. Econ. 2005, 96, 175–187. [Google Scholar] [CrossRef]
- Kobylański, P.; Kuchta, D. A note on the paper by MA Al-Fawzan and M. Haouari about a bi-objective problem for robust resource-constrained project scheduling. Int. J. Prod. Econ. 2007, 107, 496–501. [Google Scholar] [CrossRef]
- Ma, G.; Gu, L.; Li, N. Scenario-based proactive robust optimization for critical-chain project scheduling. J. Constr. Eng. Manag. 2015, 141, 04015030. [Google Scholar] [CrossRef]
- Balouka, N.; Cohen, I. A robust optimization approach for the multimode resource-constrained project scheduling problem. Eur. J. Oper. Res. 2019, 291, 457–470. [Google Scholar] [CrossRef]
- Burgelman, J.; Vanhoucke, M. Project schedule performance under general mode implementation disruptions. Eur. J. Oper. Res. 2020, 280, 295–311. [Google Scholar] [CrossRef]
- Chtourou, H.; Haouari, M. A two-stage-priority-rule-based algorithm for robust resource-constrained project scheduling. Comput. Ind. Eng. 2008, 55, 183–194. [Google Scholar] [CrossRef]
- Talbot, F.B. Resource-constrained project scheduling with time-resource tradeoffs: The non-preemptive case. Manag. Sci. 1982, 28, 1197–1210. [Google Scholar] [CrossRef]
- Chen, A.H.L.; Liang, Y.C.; Padilla, J.D. A practical and robust execution time-frame procedure for the multi-mode resource-constrained project scheduling problem with minimal and maximal time lags. Algorithms 2016, 9, 63. [Google Scholar] [CrossRef] [Green Version]
- Storn, R.; Price, K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Mohapatra, P.; Roy, S.; Das, K.N.; Dutta, S.; Raju, M.S.S. A review of evolutionary algorithms in solving large scale benchmark optimisation problems. Int. J. Math. Oper. Res. 2022, 21, 104–126. [Google Scholar] [CrossRef]
- Pant, M.; Zaheer, H.; Garcia-Hernandez, L.; Abraham, A. Differential Evolution: A review of more than two decades of research. Eng. Appl. Artif. Intell. 2020, 90, 103479. [Google Scholar]
- Han, Y.; Li, J.; Sang, H.; Liu, Y.; Gao, K.; Pan, Q. Discrete evolutionary multi-objective optimization for energy-efficient blocking flow shop scheduling with setup time. Appl. Soft Comput. 2020, 93, 106343. [Google Scholar] [CrossRef]
- de Fátima Morais, M.; Ribeiro, M.H.D.M.; da Silva, R.G.; Mariani, V.C.; dos Santos Coelho, L. Discrete differential evolution metaheuristics for permutation flow shop scheduling problems. Comput. Ind. Eng. 2022, 166, 107956. [Google Scholar] [CrossRef]
- Öztop, H.; Tasgetiren, M.F.; Kandiller, L.; Pan, Q.K. Metaheuristics with restart and learning mechanisms for the no-idle flowshop scheduling problem with makespan criterion. Comput. Oper. Res. 2022, 138, 105616. [Google Scholar] [CrossRef]
- Yuan, Y.; Xu, H. Flexible job shop scheduling using hybrid differential evolution algorithms. Comput. Ind. Eng. 2013, 65, 246–260. [Google Scholar] [CrossRef]
- Zhao, F.; Shao, Z.; Wang, J.; Zhang, C. A hybrid differential evolution and estimation of distribution algorithm based on neighbourhood search for job shop scheduling problems. Int. J. Prod. Res. 2016, 54, 1039–1060. [Google Scholar] [CrossRef]
- Zhang, G.; Xing, K.; Cao, F. Discrete differential evolution algorithm for distributed blocking flow shop scheduling with makespan criterion. Eng. Appl. Artif. Intell. 2018, 76, 96–107. [Google Scholar] [CrossRef]
- Wu, X.; Liu, X.; Zhao, N. An improved differential evolution algorithm for solving a distributed assembly flexible job shop scheduling problem. Memetic Comput. 2019, 11, 335–355. [Google Scholar] [CrossRef]
- Ali, I.M.; Essam, D.; Kasmarik, K. A novel design of differential evolution for solving discrete traveling salesman problems. Swarm Evol. Comput. 2020, 52, 100607. [Google Scholar] [CrossRef]
- Zhao, F.; Zhao, L.; Wang, L.; Song, H. An ensemble discrete differential evolution for the distributed blocking flow shop scheduling with minimizing makespan criterion. Expert Syst. Appl. 2020, 160, 113678. [Google Scholar] [CrossRef]
- Yuan, S.; Li, T.; Wang, B. A discrete differential evolution algorithm for flow shop group scheduling problem with sequence-dependent setup and transportation times. J. Intell. Manuf. 2021, 32, 427–439. [Google Scholar] [CrossRef]
- Moraglio, A.; Togelius, J.; Silva, S. Geometric differential evolution for combinatorial and programs spaces. Evol. Comput. 2013, 21, 591–624. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krömer, P.; Uher, V.; Snášel, V. Novel Random Key Encoding Schemes for the Differential Evolution of Permutation Problems. IEEE Trans. Evol. Comput. 2022, 26, 43–57. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, W.N.; Zhan, Z.H.; Lin, Y.; Gong, Y.J.; Zhang, J. A set-based discrete differential evolution algorithm. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013; pp. 1347–1352. [Google Scholar]
- Baioletti, M.; Milani, A.; Santucci, V. Variable neighborhood algebraic differential evolution: An application to the linear ordering problem with cumulative costs. Inf. Sci. 2020, 507, 37–52. [Google Scholar] [CrossRef]
- Santucci, V.; Baioletti, M.; Di Bari, G. An improved memetic algebraic differential evolution for solving the multidimensional two-way number partitioning problem. Expert Syst. Appl. 2021, 178, 114938. [Google Scholar] [CrossRef]
- Wang, L.; Fu, X.; Mao, Y.; Menhas, M.I.; Fei, M. A novel modified binary differential evolution algorithm and its applications. Neurocomputing 2012, 98, 55–75. [Google Scholar] [CrossRef]
- Pampara, G.; Engelbrecht, A.P.; Franken, N. Binary differential evolution. In Proceedings of the 2006 IEEE International Conference on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006; pp. 1873–1879. [Google Scholar]
- Damak, N.; Jarboui, B.; Siarry, P.; Loukil, T. Differential evolution for solving multimode resource-constrained project scheduling problems. Comput. Oper. Res. 2009, 36, 2653–2659. [Google Scholar] [CrossRef]
- Kazemipoor, H.; Tavakkoli-Moghaddam, R.; Shahnazari-Shahrezaei, P.; Azaron, A. A differential evolution algorithm to solve multi-skilled project portfolio scheduling problems. Int. J. Adv. Manuf. Technol. 2013, 64, 1099–1111. [Google Scholar] [CrossRef]
- Peng, W.; Huang, M. A critical chain project scheduling method based on a differential evolution algorithm. Int. J. Prod. Res. 2014, 52, 3940–3949. [Google Scholar] [CrossRef]
- Zhang, L.; Luo, Y.; Zhang, Y. Hybrid particle swarm and differential evolution algorithm for solving multimode resource-constrained project scheduling problem. J. Control Sci. Eng. 2015, 2015, 48. [Google Scholar] [CrossRef] [Green Version]
- Eshraghi, A. A new approach for solving resource constrained project scheduling problems using differential evolution algorithm. Int. J. Ind. Eng. Comput. 2016, 7, 205–216. [Google Scholar] [CrossRef]
- Sallam, K.M.; Chakrabortty, R.K.; Ryan, M.J. A hybrid differential evolution with cuckoo search for solving resource-constrained project scheduling problems. In Proceedings of the 2019 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Macao, China, 15–18 December 2019; pp. 1344–1348. [Google Scholar]
- Quoc, H.D.; The, L.N.; Doan, C.N.; Thanh, T.P. New Effective Differential Evolution Algorithm for the Project Scheduling Problem. In Proceedings of the 2020 2nd International Conference on Computer Communication and the Internet (ICCCI), Nagoya, Japan, 26–29 June 2020; pp. 150–157. [Google Scholar]
- Institute of Management and Economics, TU Clausthal. Multi Mode Project Duration Problem MRCPSP/Max. Available online: https://www.wiwi.tu-clausthal.de/en/ueber-uns/abteilungen/betriebswirtschaftslehre-insbesondere-produktion-und-logistik/research/research-areas/project-generator-progen/max-and-psp/max-library/multi-mode-project-duration-problem-mrcpsp/max (accessed on 7 October 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activity | Predecessor |
|---|---|
| 0 | - |
| 1 | 0 |
| 2 | 0 |
| 3 | 1 |
| 4 | 2 |
| 5 | 3 |
| 6 | 4, 5 |
| 7 | 5, 6 |
| Sequence of Tasks | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Solution | 1 | 3 | 5 | 2 | 4 | 6 |
| Solution | 1 | 2 | 3 | 5 | 4 | 6 |
| Solution | 2 | 1 | 4 | 3 | 5 | 6 |
| 0.30 | 0.20 | 1.00 | 0.30 | 0.21 | 0.10 | |
| Mutated Vector | 0.55 | 3.30 | 3.50 | 2.90 | 3.69 | 6.00 |
| Sequence of Tasks | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Target Vector | 2 | 1 | 3 | 5 | 4 | 6 |
| Mutated Vector | 0.55 | 3.30 | 3.50 | 2.90 | 3.69 | 6.00 |
| 0.40 | 0.14 | 0.90 | 0.85 | 1.00 | 0.02 | |
| Trial Vector | 2 | 3.30 | 3 | 5 | 4 | 6.00 |
| Decoded Vector | 1 | 3 | 2 | 5 | 4 | 6 |
| Parameter | Setting |
|---|---|
| Population Size (Np) | 40 |
| Scaling Factor (F) | 1.5 |
| ) | 0.2 |
| 1 | |
| frac | 0.25 |
| Parameter | Setting |
|---|---|
| Population Size (Np) | 30 |
| Abandonment Limit | 5 |
| Maximum Number of Cycles (MNC) | 20 |
| 1 | |
| frac | 0.25 |
| Benchmark Set | Optima Found (No.) | Average Run Time (s) | ||
|---|---|---|---|---|
| ABC | DDE | ABC | DDE | |
| MM30 | 260 | 263 | 11.888 | 12.189 |
| MM50 | 123 | 124 | 17.063 | 17.223 |
| MM100 | 84 | 87 | 32.037 | 32.257 |
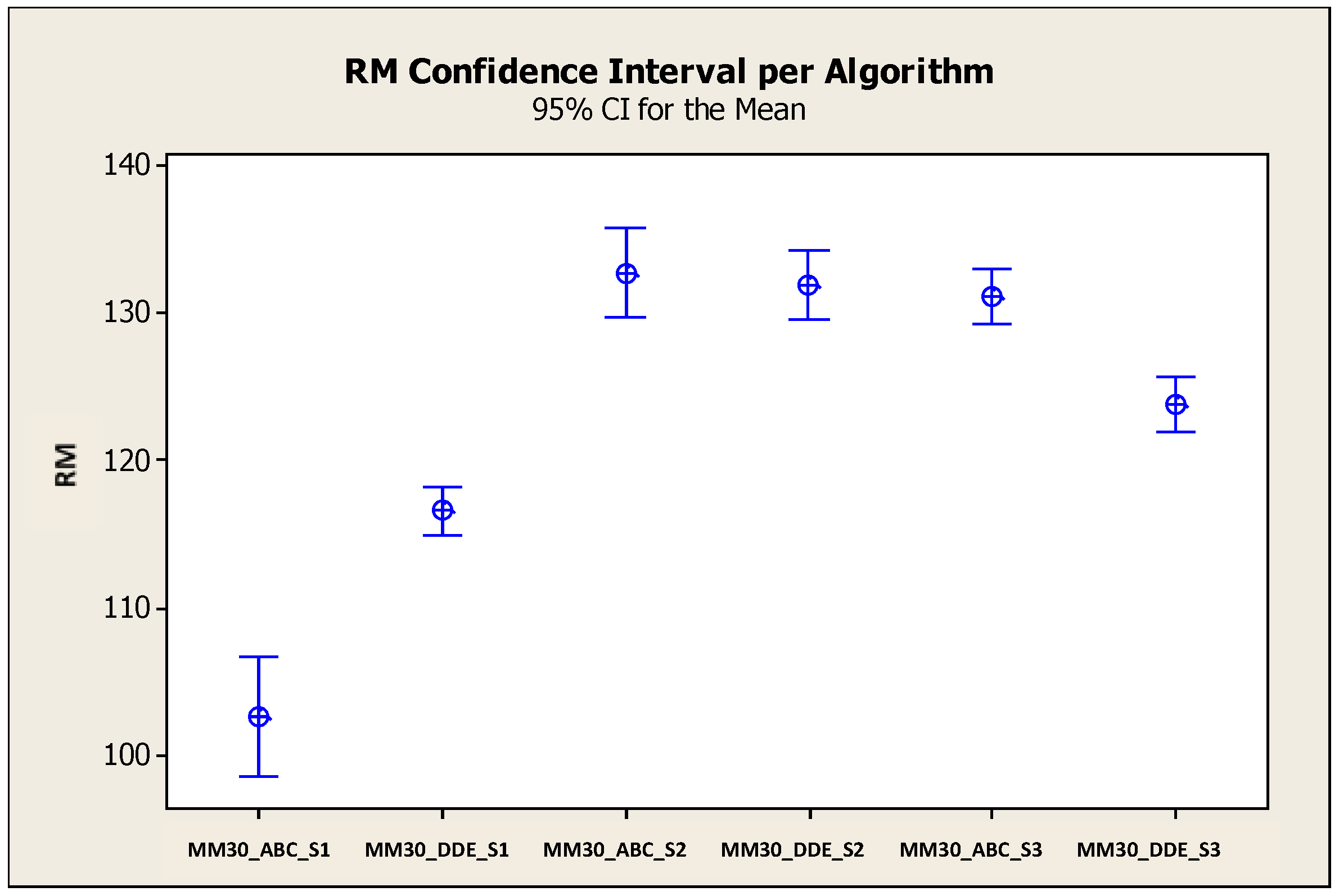
| Stage | Measure | MM30 | MM50 | MM100 | |||
|---|---|---|---|---|---|---|---|
| ABC | DDE | ABC | DDE | ABC | DDE | ||
| S1 | Avg. Dev. | 0.00176 | 0.00580 | 0.04571 | 0.03104 | 0.04424 | 0.04031 |
| Std. Dev. | 0.00664 | 0.01952 | 0.03946 | 0.06002 | 0.03257 | 0.04090 | |
| Avg. RM. | 102.75556 | 116.62593 | 116.62593 | 117.31481 | 117.39630 | 115.85185 | |
| S2 | Avg. Dev. | 0.09690 | 0.09524 | 0.10132 | 0.09640 | 0.08497 | 0.07570 |
| Std. Dev. | 0.05793 | 0.08394 | 0.05917 | 0.08180 | 0.04307 | 0.05348 | |
| Avg. RM. | 132.72593 | 131.86296 | 133.81481 | 136.22593 | 137.12963 | 134.46670 | |
| S3 | Avg. Dev. | 0.05041 | 0.02491 | 0.05387 | 0.03711 | 0.04373 | 0.04259 |
| Std. Dev. | 0.04794 | 0.04856 | 0.05220 | 0.05615 | 0.04067 | 0.04371 | |
| Avg. RM. | 100.62593 | 123.80370 | 124.45926 | 125.99259 | 127.43704 | 124.52593 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, A.H.-L.; Liang, Y.-C.; Padilla, J.D. Dealing with Uncertainty in the MRCPSP/Max Using Discrete Differential Evolution and Entropy. Appl. Sci. 2022, 12, 3049. https://doi.org/10.3390/app12063049
Chen AH-L, Liang Y-C, Padilla JD. Dealing with Uncertainty in the MRCPSP/Max Using Discrete Differential Evolution and Entropy. Applied Sciences. 2022; 12(6):3049. https://doi.org/10.3390/app12063049
Chicago/Turabian StyleChen, Angela Hsiang-Ling, Yun-Chia Liang, and José David Padilla. 2022. "Dealing with Uncertainty in the MRCPSP/Max Using Discrete Differential Evolution and Entropy" Applied Sciences 12, no. 6: 3049. https://doi.org/10.3390/app12063049