
Dynamic Response of Slope Inertia-Based Timoshenko Beam under a Moving Load


Abstract
:1. Introduction
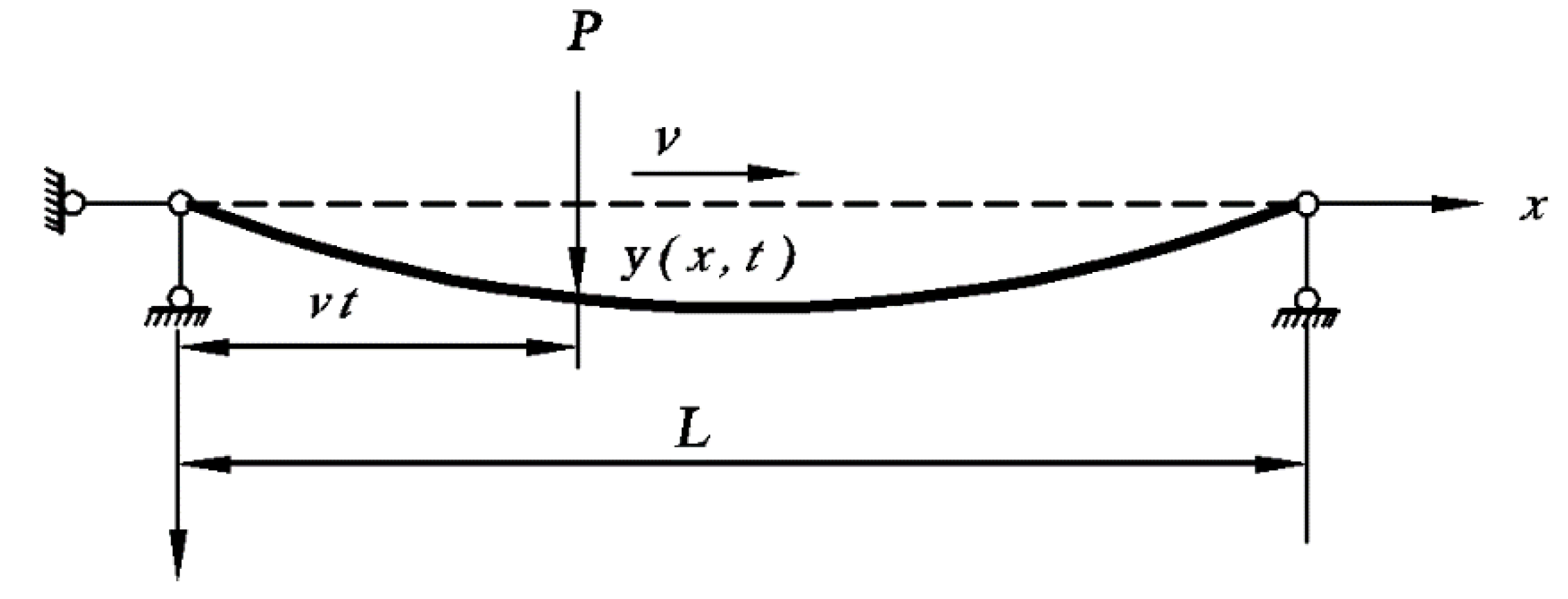
2. Problem Definition
3. Results
4. Finite Element Solution
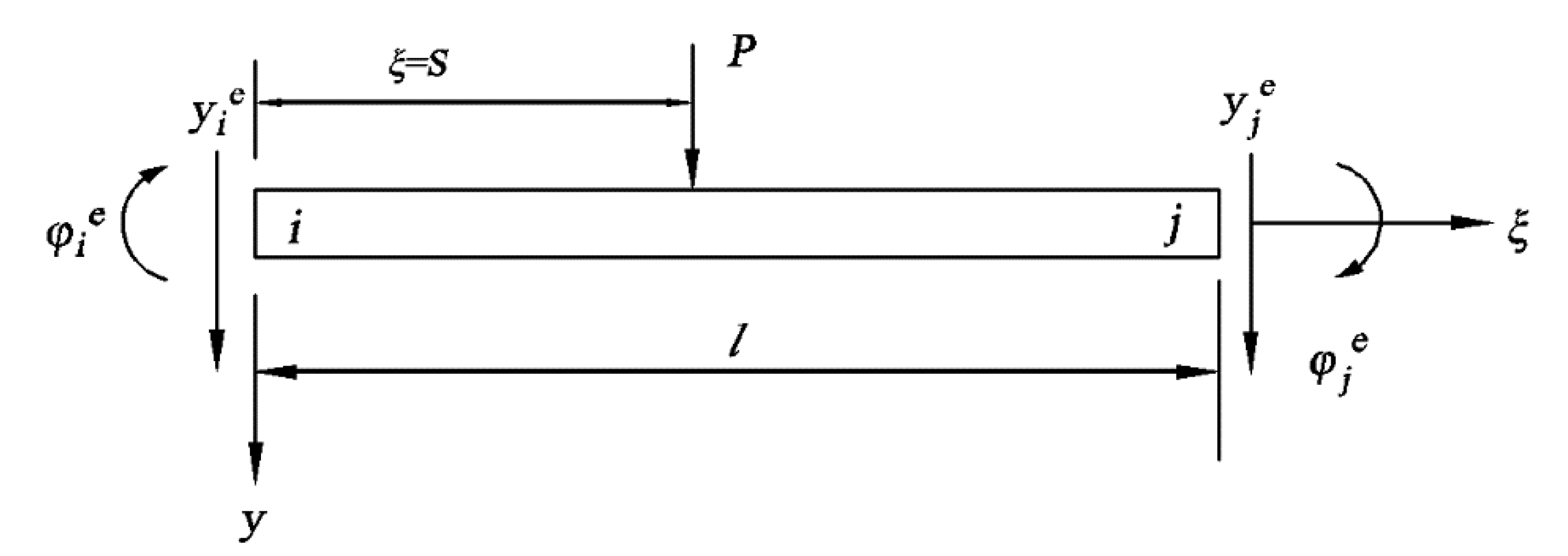
4.1. Shape Functions
4.2. Derivation of Element Matrices
4.3. Governing Matrix Equation
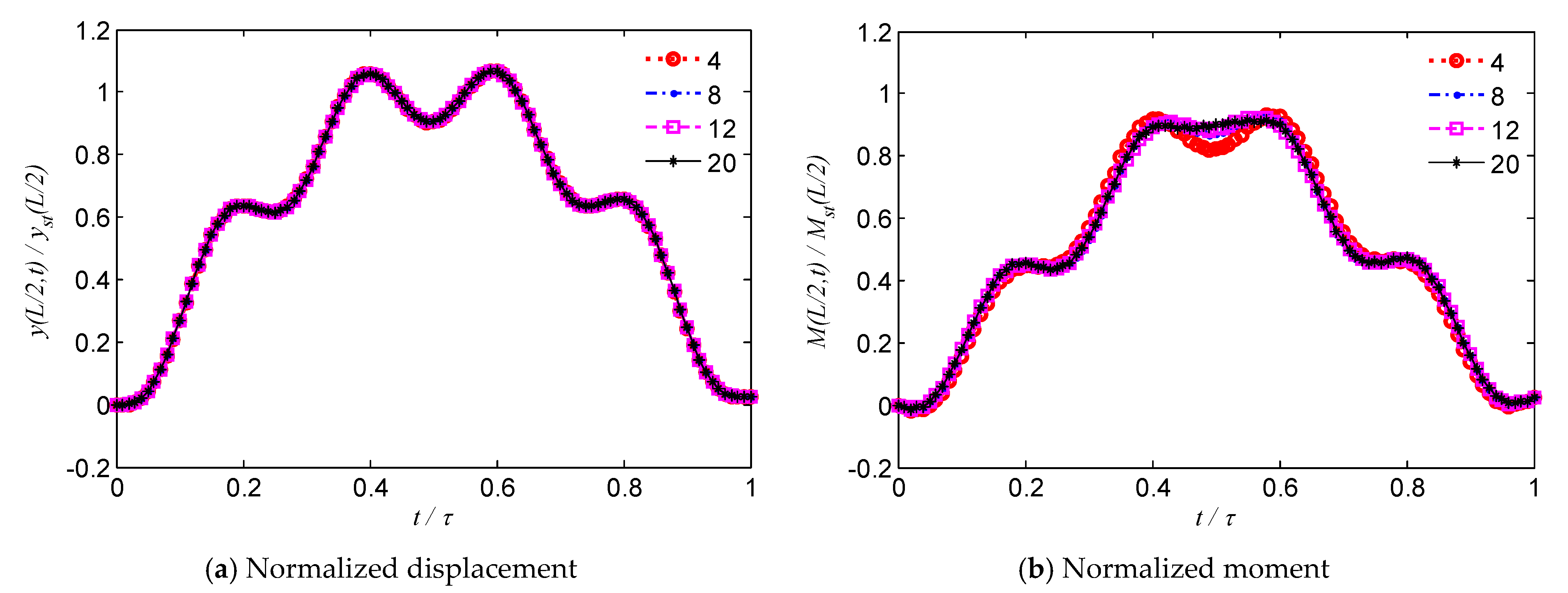
4.4. Numerical Results
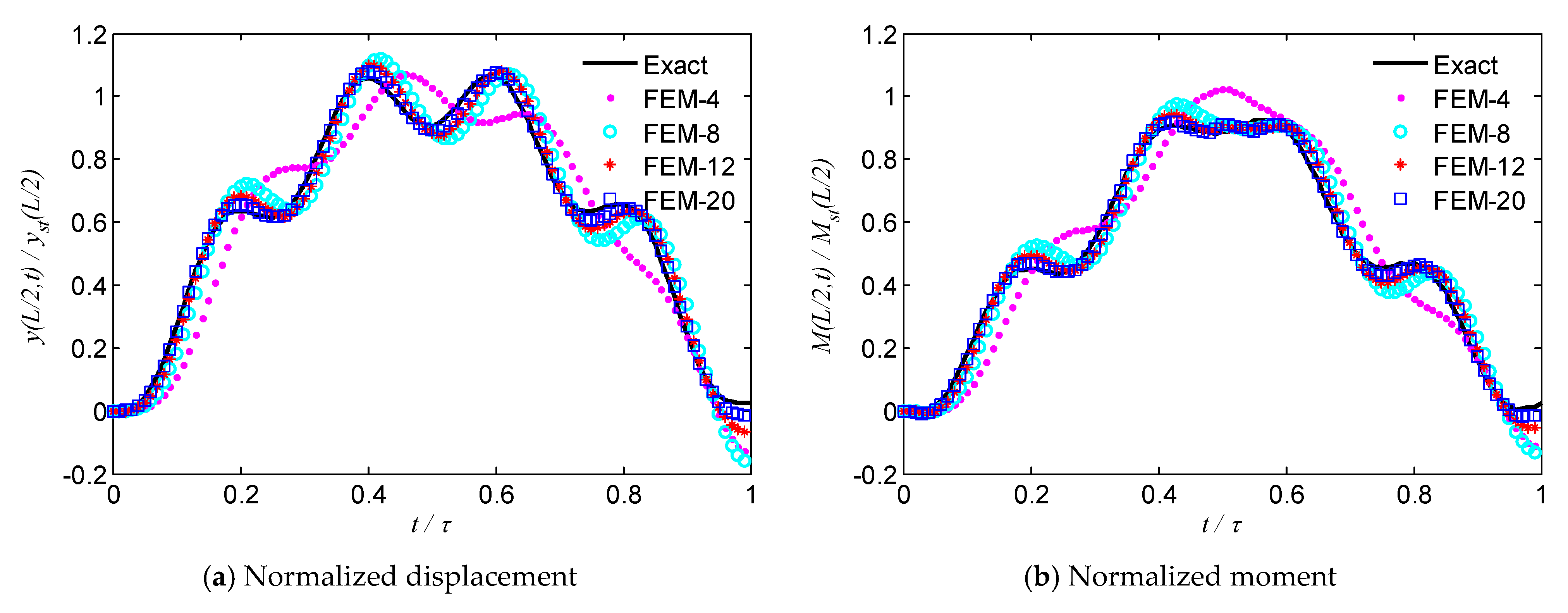
5. Comparative Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ouyang, H. Moving-load dynamic problems: A tutorial (with a brief overview). Mech. Syst. Signal Process. 2011, 25, 2039–2060. [Google Scholar] [CrossRef]
- Frýba, L.; Steele, C.R. Vibration of Solids and Structures Under Moving Loads. J. Appl. Mech. 1976, 43, 524. [Google Scholar] [CrossRef]
- Zhang, X.; Thompson, D.; Sheng, X. Differences between Euler-Bernoulli and Timoshenko beam formulations for calculating the effects of moving loads on a periodically supported beam. J. Sound Vib. 2020, 481, 115432. [Google Scholar] [CrossRef]
- Xia, G.Y.; Shu, W.Y.; Stanciulescu, I. Analytical and numerical studies on the sope inertia-based Timoshenko beam. J. Sound Vib. 2020, 473, 115227. [Google Scholar] [CrossRef]
- Aied, H.; Gonzalez, A. Theoretical response of a simply supported beam with a strain rate dependant modulus to a moving load. Eng. Struct. 2014, 77, 95–108. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.-S.; Wang, C. Dynamic response and stability of an inclined Euler beam under a moving vertical concentrated load. Eng. Struct. 2019, 186, 243–254. [Google Scholar] [CrossRef]
- Olsson, M. On the fundamental moving load problem. J. Sound Vib. 1991, 145, 299–307. [Google Scholar] [CrossRef]
- Wu, J.-J.; Whittaker, A.; Cartmell, M. The use of finite element techniques for calculating the dynamic response of structures to moving loads. Comput. Struct. 2000, 78, 789–799. [Google Scholar] [CrossRef]
- Sun, L. Dynamic displacement response of beam-type structures to moving line loads. Int. J. Solids Struct. 2001, 38, 8869–8878. [Google Scholar] [CrossRef]
- Basu, D.; Kameswara Rao, N.S.V. Analytical solutions for Euler-Bernoulli beam on viso-elastic foundation subjected to moving load. Int. J. Numer. Anal. Met. 2013, 37, 945–960. [Google Scholar] [CrossRef]
- Zangeneh, A.; Museros, P.; Pacoste, C.; Karoumi, R. Free vibration of viscoelastically supported beam bridges under moving loads: Closed-form formula for maximum resonant response. Eng. Struct. 2021, 244, 112759. [Google Scholar] [CrossRef]
- Han, S.M.; Benaroya, H.; Wei, T. Dynamics of transversely vibrating beams using four engineering theories. J. Sound Vib. 1999, 225, 935–988. [Google Scholar] [CrossRef] [Green Version]
- Timoshenko, S. LXVI. On the correction for shear of the differential equation for transverse vibrations of prismatic bars. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1921, 41, 744–746. [Google Scholar] [CrossRef] [Green Version]
- Timoshenko, S.P.X. On the transverse vibrations of bars of uniform cross-section. Philos. Mag. J. Sci. 1922, 43, 125–131. [Google Scholar] [CrossRef] [Green Version]
- Elishakoff, I. An equation both more consistent and simpler than the Bresse-Timoshenko equation. In Advances in Mathematical Modeling and Experimental Methods for Materials and Structures; Springer: Berlin, Germany, 2009; pp. 249–254. [Google Scholar]
- Chen, Y.H.; Huang, Y.H.; Shih, C.T. Response of an infinite Timoshenko beam on a visoelastic foundation to a harmonic moving load. J. Sound Vib. 2001, 241, 809–824. [Google Scholar] [CrossRef]
- Lou, P.; Dai, G.-L.; Zeng, Q.-Y. Dynamic Analysis of a Timoshenko Beam Subjected to Moving Concentrated Forces Using the Finite Element Method. Shock Vib. 2007, 14, 459–468. [Google Scholar] [CrossRef] [Green Version]
- Younesian, D.; Kargarnovin, M.H.; Thompson, D.J.; Jones, C.J.C. Parametrically excited vibration of a Timoshenko beam on random visoelastic foundation subjected to a harmonic moving load. Nonlinear Dynam 2006, 45, 75–93. [Google Scholar] [CrossRef]
- Nguyen, D.K.; Nguyen, Q.H.; Tran, T.T.; Bui, V.T. Vibration of bi-dimensional functionally graded Timoshenko beams excited by a moving load. Acta Mech. 2017, 228, 141–155. [Google Scholar] [CrossRef]
- Xia, G.Y.; Zeng, Q.Y. Timoshenko beam theory and its applications. Eng. Mech. 2015, 37, 302–316. (In Chinese) [Google Scholar]
- Elishakoff, I.; Kaplunov, J.; Nolde, E. Celebrating the centenary of Timoshenko’s study of effects of shear deformation and rotary inertia. Appl. Mech. Rev. 2015, 67, 060802. [Google Scholar] [CrossRef]
- Elishakoff, I.; Hache, F.; Challamel, N. Variational derivation of governing differential equations for truncated version of Bresse-Timoshenko beams. J. Sound Vib. 2018, 435, 409–430. [Google Scholar] [CrossRef]
- Nesterenko, V.V. A theory for transverse vibrations of a Timoshenko beam. J. Appl. Math. Mech. 1993, 57, 669–677. [Google Scholar] [CrossRef]
- Stephen, N.G. The second spectrum of Timoshenko beam theory-further assement. J. Sound Vib. 2006, 292, 372–389. [Google Scholar] [CrossRef] [Green Version]
- Cazzani, A.; Stochino, F.; Turco, E. On the whole spectrum of Timoshenko beams. Part I: A theoretical revisitation. Z. Angew. Math. Phys. 2016, 67, 24. [Google Scholar] [CrossRef]
- Cazzani, A.; Stochino, F.; Turco, E. On the whole spectrum of Timoshenko beams. Part II: Further applications. Z. Angew. Math. Phys. 2016, 67, 25. [Google Scholar] [CrossRef]
- Díaz-De-Anda, A.; Flores, J.; Gutiérrez, L.; Méndez-Sánchez, R.; Monsivais, G.; Morales, A. Experimental study of the Timoshenko beam theory predictions. J. Sound Vib. 2012, 331, 5732–5744. [Google Scholar] [CrossRef]
- Weaver, W.; Timoshenko, S.P.; Young, D.H. Vibration Problems in Engineering, 5th ed.; John Wiley & Sons Ltd.: New York, NY, USA, 1990. [Google Scholar]
- Chen, R.; Wang, C.F.; Xue, S.T.; Tang, H.S. Modification of motion equation of Timoshenko beam and its effect. J. Tongji Univ. 2005, 33, 711–715. (In Chinese) [Google Scholar]
- Elishakoff, I.; Hache, F.; Challamel, N. Critical contrasting of three versions of vibrating Bresse–Timoshenko beam with a crack. Int. J. Solids Struct. 2017, 109, 143–151. [Google Scholar] [CrossRef]
- Elishakoff, I.; Tonzani, G.M.; Marzani, A. Three alternative versions of Bresse–Timoshenko theory for beam on pure Pasternak foundation. Int. J. Mech. Sci. 2018, 149, 402–412. [Google Scholar] [CrossRef]
- Bhat, K.S.; Sarkar, K.; Ganguli, R.; Elishakoff, I. Slope-Inertia Model of Non-Uniform and Inhomogeneous Bresse-Timoshenko Beams. AIAA J. 2018, 56, 4158–4168. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering, 2nd ed.; Tsinghua University Press: Beijing, China, 2005. [Google Scholar]
- Lee, H. The dynamic response of a Timoshenko beam subjected to a moving mass. J. Sound Vib. 1996, 198, 249–256. [Google Scholar] [CrossRef]
- Katz, R.; Lee, C.; Ulsoy, A.G.; Scott, R. The dynamic response of a rotating shaft subject to a moving load. J. Sound Vib. 1988, 122, 131–148. [Google Scholar] [CrossRef]
- Yokoyama, T. Vibrations of timoshenko beam-columns on two-parameter elastic foundations. Earthq. Eng. Struct. Dyn. 1991, 20, 355–370. [Google Scholar] [CrossRef]
- Reddy, J. On locking-free shear deformable beam finite elements. Comput. Methods Appl. Mech. Eng. 1997, 149, 113–132. [Google Scholar] [CrossRef]
- Rieker, J.R.; Lin, Y.H.; Trethewey, M.W. Discretization considerations in moving load finite element beam models. Finite Elem. Anal. Des. 1996, 21, 129–144. [Google Scholar] [CrossRef]
- Yoshida, D.M.; Weaver, W. Finite-element analysis of beams and plates with moving loads. J. Int. Assoc. Bridge Struct. Eng. 1971, 31, 179–195. [Google Scholar] [CrossRef]
- Filho, F.V. Literature Review: Finite Element Analysis of Structures Under Moving Loads. Shock Vib. Dig. 1978, 10, 27–35. [Google Scholar] [CrossRef]
- Olsson, M. Analysis of Structures Subjected to Moving Loads. Ph.D. Thesis, Lund University, Lund, Sweden, 1986. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Beam length L | 1 m |
| Young’s modulus E | 2.07 × 1011 N/m2 |
| Shear modulus G | 7.76 × 1010 N/m2 |
| Shear correction coefficient | 0.9 |
| Density | 7700 kg/m3 |
| Circular cross-sectional area A | |
| Area moment of inertia I |
| Parameters | Value |
|---|---|
| Beam length L | 0.1016 m |
| Young’s modulus E | 2.07 × 1011 N/m2 |
| Shear modulus G | 7.76 × 1010 N/m2 |
| Shear correction coefficient | 5/6 |
| Density | 10,663 kg/m3 |
| Square cross-sectional area A | 4.03 × 10−5 m2 |
| Area moment of inertia I | 1.35 × 10−10 m4 |
| c | D1 | D2 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SIBT | Euler-Bernoulli | SIBT | Euler-Bernoulli | |||||||
| Exact | FEM | [7] | [39] | [40] | [41] | Exact | FEM | [7] | [41] | |
| 0.125 | 1.137 | 1.151 | 1.121 | 1.112 | - | 1.122 | 1.038 | 1.048 | 1.027 | 1.031 |
| 0.250 | 1.275 | 1.284 | 1.258 | 1.251 | 1.258 | 1.259 | 1.091 | 1.097 | 1.089 | 1.082 |
| 0.500 | 1.722 | 1.728 | 1.705 | 1.700 | 1.707 | 1.706 | 1.400 | 1.403 | 1.389 | 1.390 |
| 0.993 | 1.570 | 1.567 | - | - | - | - | 1.319 | 1.296 | - | - |
| 1.000 | 1.569 | 1.560 | 1.548 | 1.540 | 1.547 | 1.550 | 1.317 | 1.287 | 1.273 | 1.286 |
| c | D3 | |||||
|---|---|---|---|---|---|---|
| SIBT | Timoshenko | |||||
| b = 0.03 | b = 0.15 | b = 0.03 | b = 0.15 | |||
| Exact | FEM | Exact | FEM | [35] | [35] | |
| 0.11 | 1.044 | 1.039 | 1.144 | 1.149 | 1.039 | 1.115 |
| 0.3 | 1.410 | 1.412 | 1.557 | 1.557 | 1.411 | 1.555 |
| 0.45 | 1.610 | 1.611 | 1.744 | 1.747 | 1.610 | 1.731 |
| 0.5 | 1.602 | 1.603 | 1.712 | 1.715 | 1.602 | 1.717 |
| 0.7 | 1.334 | 1.332 | 1.368 | 1.371 | 1.334 | 1.366 |
| 0.9 | 1.034 | 1.034 | 1.142 | 1.143 | 1.034 | 1.134 |
| 0.958 | 0.979 | 0.980 | 1.081 | 1.085 | - | - |
| 0.998 | 0.946 | 0.947 | 1.043 | 1.045 | - | - |
| 1.1 | 0.873 | 0.873 | 0.946 | 0.949 | 0.873 | 0.943 |
| 1.3 | 0.740 | 0.739 | 0.776 | 0.776 | 0.740 | 0.777 |
| 1.5 | 0.603 | 0.602 | 0.645 | 0.646 | 0.603 | 0.637 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, T.; Zheng, Y.; Yu, R.; Yan, Y.; Xu, B. Dynamic Response of Slope Inertia-Based Timoshenko Beam under a Moving Load. Appl. Sci. 2022, 12, 3045. https://doi.org/10.3390/app12063045
Lei T, Zheng Y, Yu R, Yan Y, Xu B. Dynamic Response of Slope Inertia-Based Timoshenko Beam under a Moving Load. Applied Sciences. 2022; 12(6):3045. https://doi.org/10.3390/app12063045
Chicago/Turabian StyleLei, Tuo, Yifei Zheng, Renjun Yu, Yukang Yan, and Ben Xu. 2022. "Dynamic Response of Slope Inertia-Based Timoshenko Beam under a Moving Load" Applied Sciences 12, no. 6: 3045. https://doi.org/10.3390/app12063045