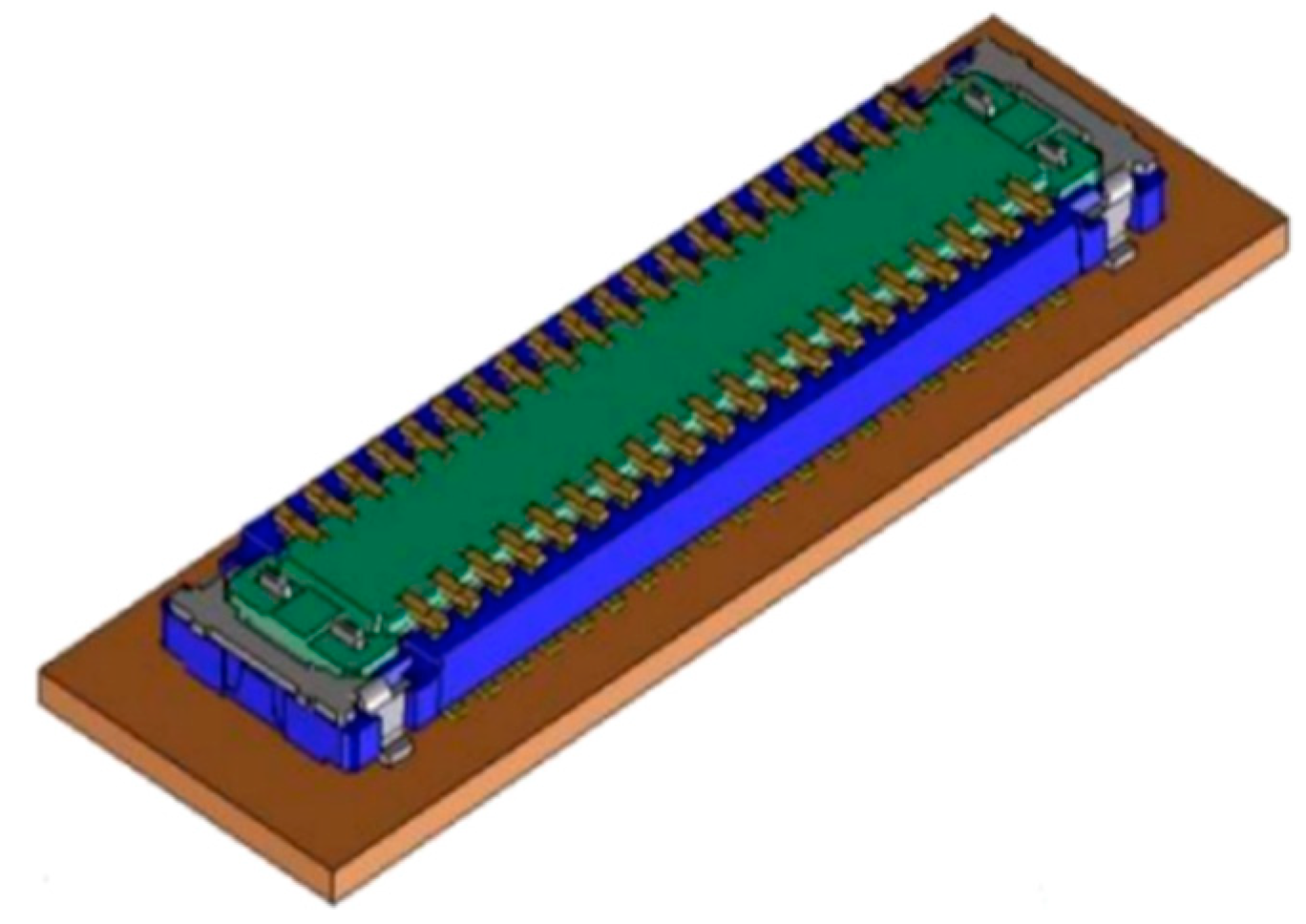
Figure 1.
Fine pitch board-to-board (BtB) connector.
Figure 1.
Fine pitch board-to-board (BtB) connector.
Figure 2.
Mating connection.
Figure 2.
Mating connection.
Figure 3.
Literature mapping review.
Figure 3.
Literature mapping review.
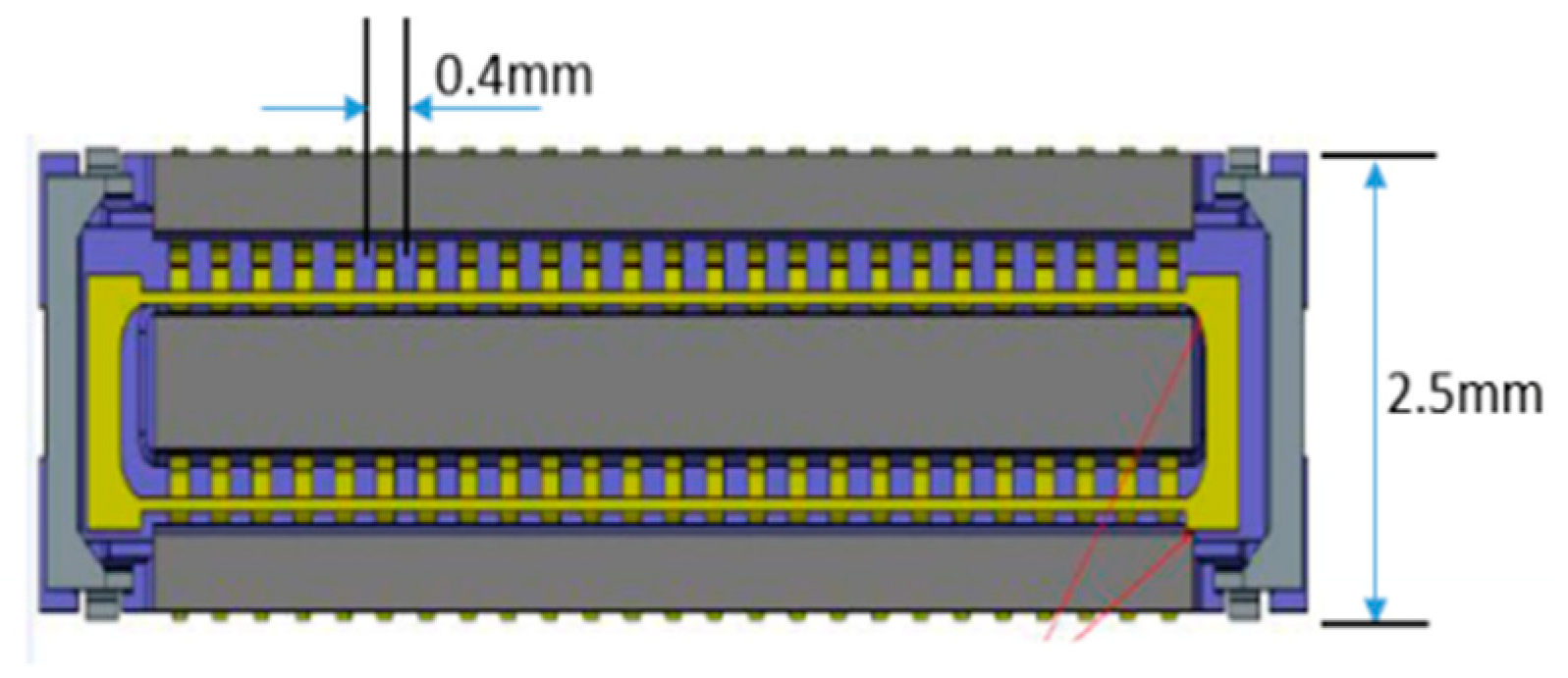
Figure 4.
The pitch and the width of the 0.4 mm BtB connector.
Figure 4.
The pitch and the width of the 0.4 mm BtB connector.
Figure 5.
Front and side view for movement limitation.
Figure 5.
Front and side view for movement limitation.
Figure 6.
The position of the BtB on the device.
Figure 6.
The position of the BtB on the device.
Figure 7.
The backside pin of the BtB.
Figure 7.
The backside pin of the BtB.
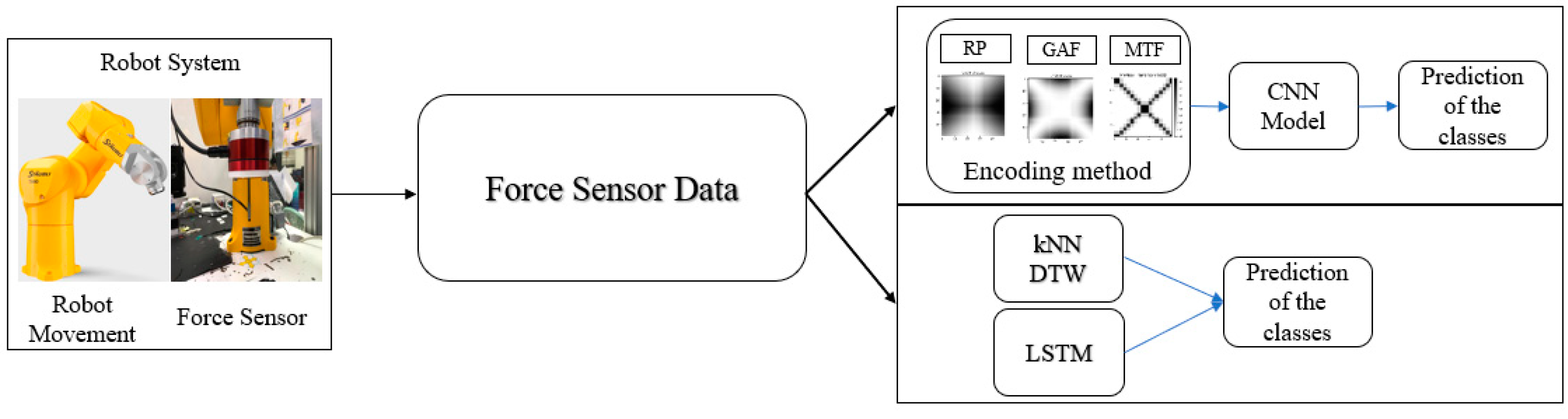
Figure 8.
Physical and communication system of the proposed approach.
Figure 8.
Physical and communication system of the proposed approach.
Figure 9.
System diagram.
Figure 9.
System diagram.
Figure 10.
Mating process.
Figure 10.
Mating process.
Figure 11.
Dataset collection area.
Figure 11.
Dataset collection area.
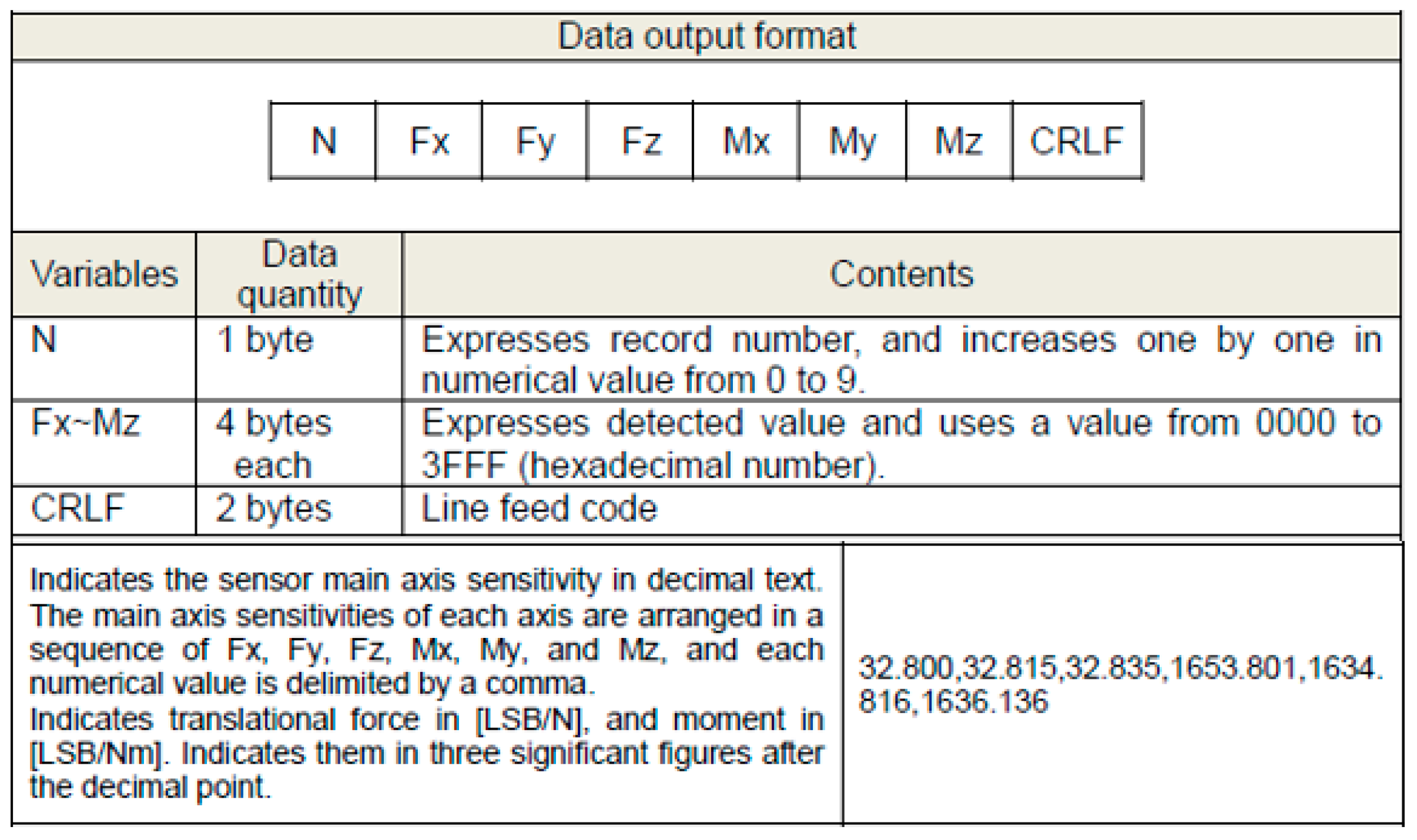
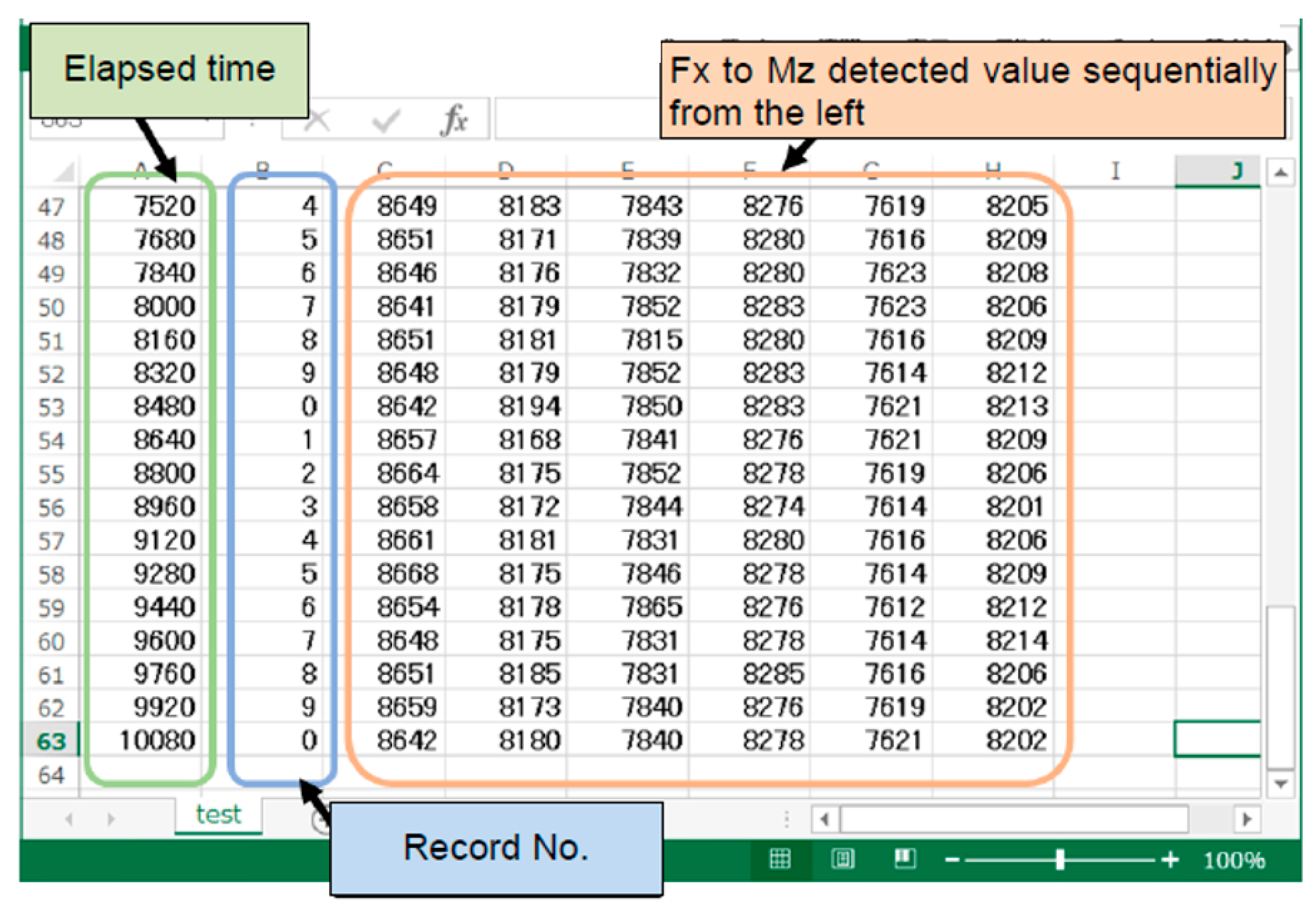
Figure 12.
Force sensor data.
Figure 12.
Force sensor data.
Figure 15.
Illustration sample of the force data as time-series data.
Figure 15.
Illustration sample of the force data as time-series data.
Figure 16.
The class distribution of the training and test data.
Figure 16.
The class distribution of the training and test data.
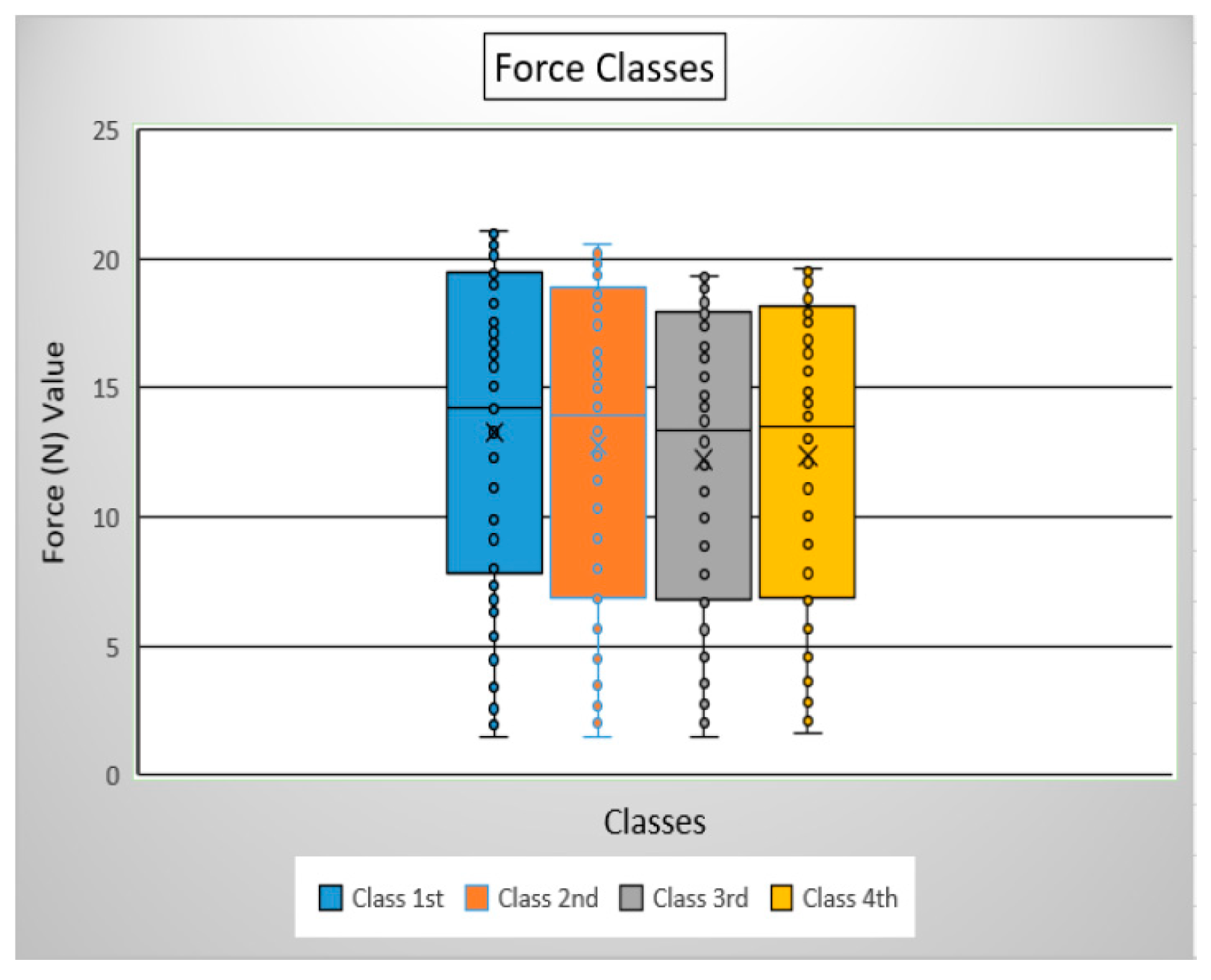
Figure 17.
Encoding method in each class.
Figure 17.
Encoding method in each class.
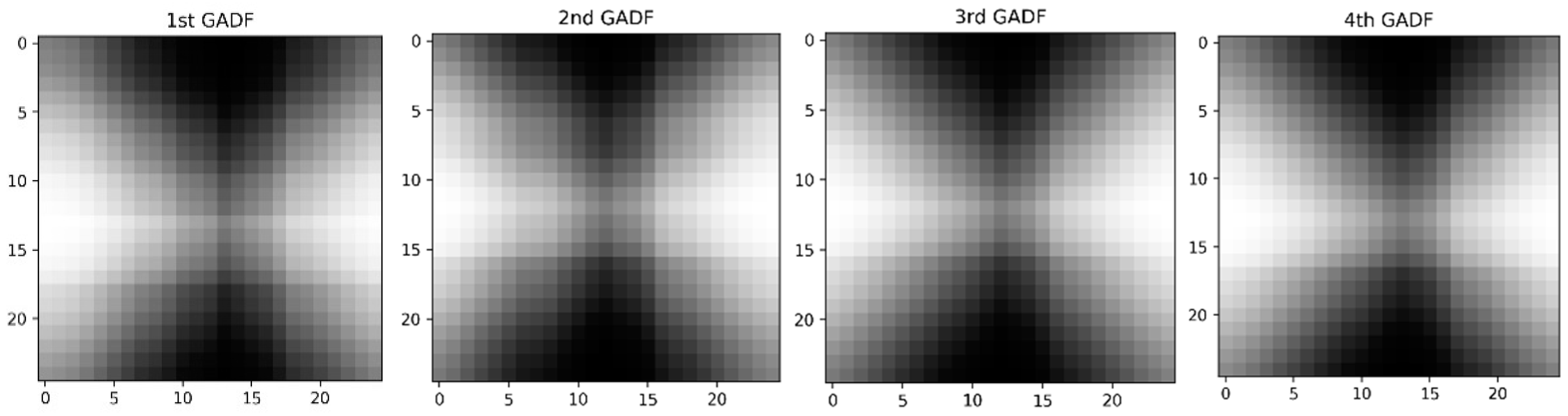
Figure 20.
Encoding methods in each class utilizing Gramian angular difference field (GADF).
Figure 20.
Encoding methods in each class utilizing Gramian angular difference field (GADF).
Figure 21.
Encoding methods in each class utilizing GADF.
Figure 21.
Encoding methods in each class utilizing GADF.
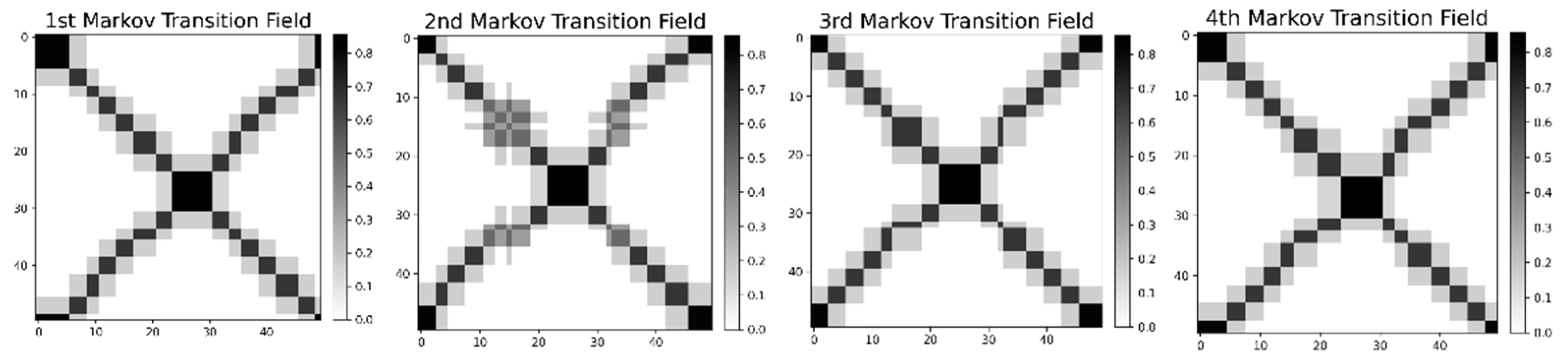
Figure 22.
Encoding methods in each class utilizing Markov transition field (MTF).
Figure 22.
Encoding methods in each class utilizing Markov transition field (MTF).
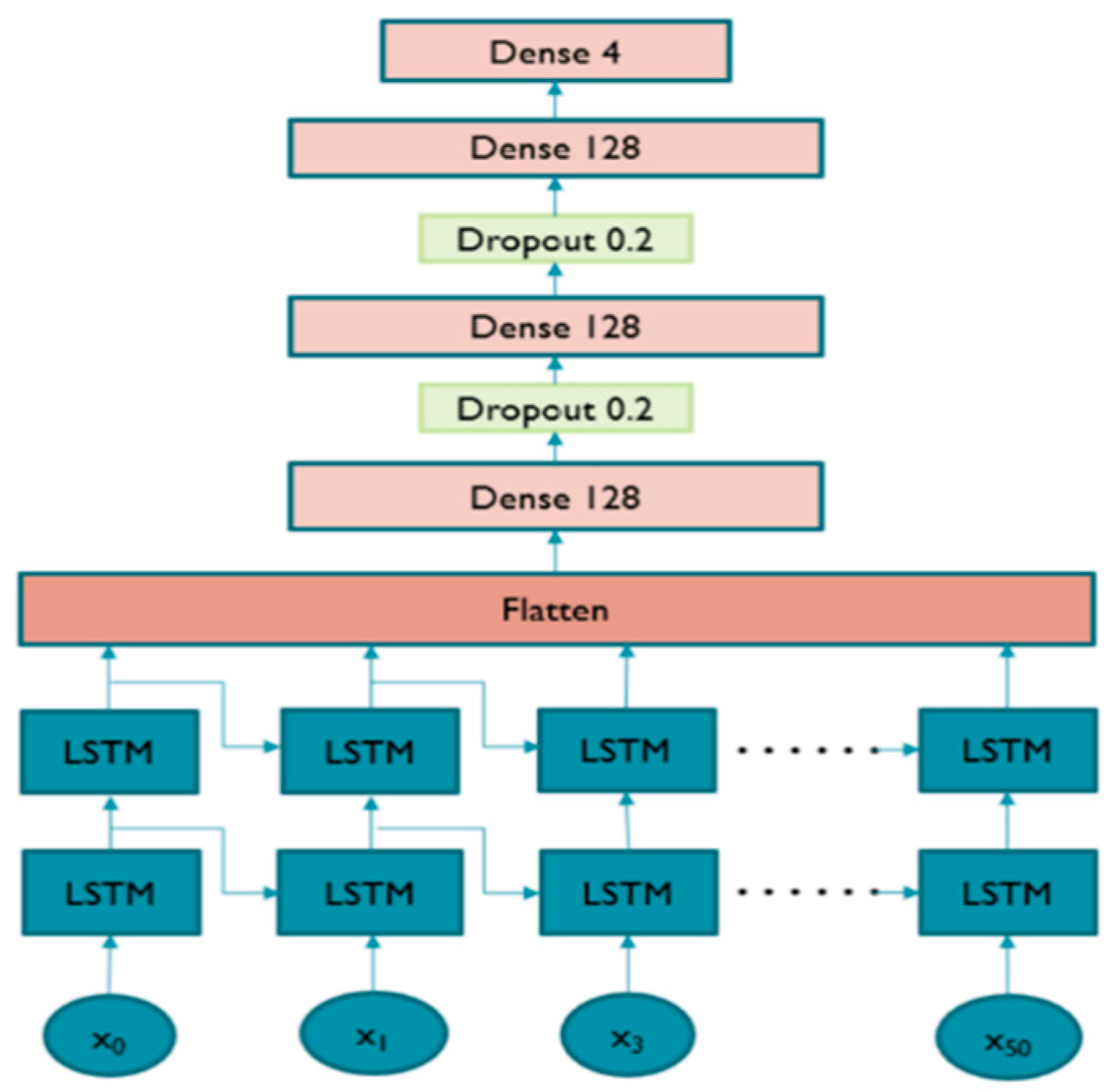
Figure 23.
The architecture of the long short-term memory (LSTM).
Figure 23.
The architecture of the long short-term memory (LSTM).
Figure 24.
Model accuracy (left), loss (middle), and confusion matrix (right) of SoftMax tuned recurrence plot (RP) model.
Figure 24.
Model accuracy (left), loss (middle), and confusion matrix (right) of SoftMax tuned recurrence plot (RP) model.
Figure 25.
Model accuracy (left), loss (middle), and confusion matrix of the SGD-tuned RP model with L2-SVM (right).
Figure 25.
Model accuracy (left), loss (middle), and confusion matrix of the SGD-tuned RP model with L2-SVM (right).
Figure 26.
Model accuracy (left), loss (middle), and confusion matrix of the RP model with L2-SVM (right).
Figure 26.
Model accuracy (left), loss (middle), and confusion matrix of the RP model with L2-SVM (right).
Figure 27.
Model accuracy (left), loss (middle), and confusion matrix (right) of the GASF CNN model.
Figure 27.
Model accuracy (left), loss (middle), and confusion matrix (right) of the GASF CNN model.
Figure 28.
Accuracy (left), loss (middle) and confusion matrix (right) of the GADF CNN model.
Figure 28.
Accuracy (left), loss (middle) and confusion matrix (right) of the GADF CNN model.
Figure 29.
Accuracy (left), error (middle) and confusion matrix (right) of the MTF CNN model.
Figure 29.
Accuracy (left), error (middle) and confusion matrix (right) of the MTF CNN model.
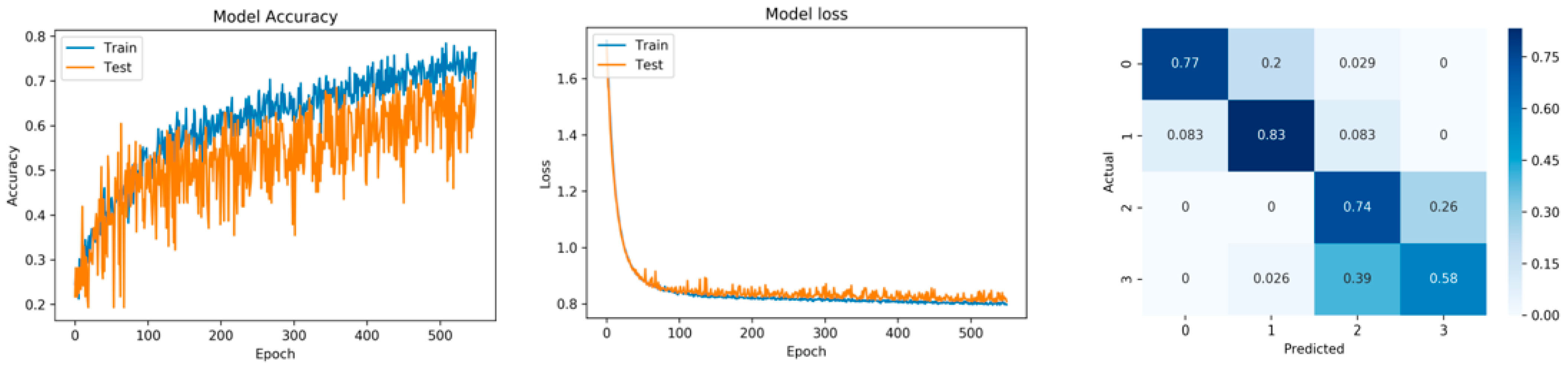
Figure 30.
Accuracy, error and confusion matrix of the LSTM model.
Figure 30.
Accuracy, error and confusion matrix of the LSTM model.
Figure 31.
The successful mating process with its insertion max force.
Figure 31.
The successful mating process with its insertion max force.
Table 1.
Highlights of the literature review.
Table 1.
Highlights of the literature review.
| Mating Category |
|---|
| Reference | Category | Sub Category | Novelty on Insertion Process |
|---|
| [2] | Technique | Position Error Mitigation | Passive Compliance Control |
| [3] | Technique | Position Error Mitigation | Variable Remote Control |
| [4] | Technique | Position Error Mitigation | Remote Center Compliance |
| [5] | Technique | Position Error Mitigation | Error Recovery Strategy |
| [6] | Technique | Blind Search Strategies | The Tilt Strategy |
| [7] | Technique | Blind Search Strategies | Spiral, Probing, and Binary Search |
| [8] | Technique | Vision-Force Guide | Hybrid Force and Vision |
| [9] | Technique | Vision-Force Guide | Hybrid Force and Vision |
| [10] | Technique | Vision-Force Guide | Robotic Gripper |
| [11] | Technique | Vision-Force Guide | Robotic Gripper |
| [12] | Technique | Vision-Force Guide | Robotic Gripper |
| [13] | Data Analysis | Probabilistic Approach | Analysis on Connector States |
| [14] | Data Analysis | Logistic Regression | Analysis on Visual, Audio, and Force |
| [15] | Data Analysis | Generalization | Fuzzy Analysis for Diagnosis |
| [16] | Data Analysis | Prediction | Speed Analysis |
| [17] | Data Analysis | Machine Learning | Reinforcement Learning |
| [18] | Data Analysis | Machine Learning | Fuzzy Logic Driven Approach |
| [19] | Data Analysis | Machine Learning | Deep Q Learning Prediction |
| [20] | Data Analysis | Machine Learning | Meta-Reinforcement Learning |
| [21] | Data Analysis | Machine Learning | Generative Adversarial Learning |
| [22] | Data Analysis | Machine Learning | Learning From Human Demonstration |
| [23] | Data Analysis | Machine Learning | Assembly Motion Demonstration |
| [24] | Data Analysis | Machine Learning | Assembly Motion Demonstration |
| [25] | Data Analysis | Machine Learning | Compliance Approach from Human Demonstration |
| [26] | Data Analysis | Encoding Approach | GAF and MTF |
| [27] | Data Analysis | Encoding Approach | GAF and MTF |
| [28] | Data Analysis | Encoding Approach | GAF and MTF |
| [29] | Data Analysis | Encoding Approach | Time Series + Deep CNN |
Table 2.
Board-to-board connector specification.
Table 2.
Board-to-board connector specification.
| Design Specification |
|---|
| Number of Pins | 50 |
|---|
| Number of Pins | 50 |
| Pitch | 0.40 mm |
| Mated height | 0.80 mm |
| Total Width | 2.50 mm |
| Type | Surface mount (SMT.) |
Table 3.
Dataset detail.
| Data Set |
|---|
| Number of classes, c | 4 |
| Number of training samples, Ntr | 400 |
| Number of testing samples, Nts | 140 |
| Length of training samples, l | 50 |
Table 4.
Hyperparameters adopted in the GADF convolutional neural network (CNN).
Table 4.
Hyperparameters adopted in the GADF convolutional neural network (CNN).
| Data Set |
|---|
| Loss function | Categorical cross-entropy |
| Optimizer | Adam (0.001) |
| Kernel Regularizer | L2 (0.01) |
| Batch size | 20 |
| Epoch | 250 (early stopping) |
Table 5.
Hyperparameters adopted in the MTF CNN network.
Table 5.
Hyperparameters adopted in the MTF CNN network.
| Data Set |
|---|
| Loss function | Categorical cross-entropy |
| Optimizer | Adam (0.001) |
| Kernel Regularizer | L2 (0.01) |
| Batch size | 20 |
| Epoch | 350 |
Table 6.
Hyperparameters of the k-nearest neighbor dynamic time warping (kNN-DTW) network.
Table 6.
Hyperparameters of the k-nearest neighbor dynamic time warping (kNN-DTW) network.
| Hyperparameters Used |
| Warping Distance | k Value |
| 10 | 5 |
| 7 |
| 9 |
| 15 | 11 |
| 13 |
| 15 |
Table 7.
Hyperparameters adopted in the RP CNN L2-SVM.
Table 7.
Hyperparameters adopted in the RP CNN L2-SVM.
| Hyperparameters Used |
|---|
| Parameters | 1st Tuned | 2nd Tuned |
|---|
| Loss | Squared-hinge | Squared-hinge |
| Optimizer | Adam | SGD |
| Kernel Regularizer | L2 (0.01) | L2 (0.01) |
| Batch size | 32 | 20 |
| Epoch | 420 (early stopping) | 600 |
Table 8.
Accuracy value RP CNN network.
Table 8.
Accuracy value RP CNN network.
| Accuracy Value of Classes |
|---|
| Classes | SoftMax | L2-SVM (SGD) | L2-SVM (Adam) |
|---|
| 1 | 0.91 | 0.77 | 0.83 |
| 2 | 0.70 | 0.83 | 0.75 |
| 3 | 0.56 | 0.74 | 0.74 |
| 4 | 0.8 | 0.58 | 0.71 |
Table 9.
Class accuracy value of GAF CNN network.
Table 9.
Class accuracy value of GAF CNN network.
| Accuracy Value of Classes |
|---|
| Classes | GASF | GADF |
|---|
| 1 | 0.83 | 0.77 |
| 2 | 0.58 | 0.67 |
| 3 | 0.74 | 0.78 |
| 4 | 0.61 | 0.63 |
Table 10.
Class accuracy value of long short-term memory (LSTM) network.
Table 10.
Class accuracy value of long short-term memory (LSTM) network.
| Accuracy Value of Classes |
|---|
| Classes | LSTM |
|---|
| 1 | 0.60 |
| 2 | 0.71 |
| 3 | 0.52 |
| 4 | 0.50 |
Table 11.
Class accuracy value of warping distance 10.
Table 11.
Class accuracy value of warping distance 10.
| Accuracy Value of Classes |
|---|
| Classes | k = 5 | k = 7 | k = 9 |
|---|
| 1 | 0.49 | 0.54 | 0.54 |
| 2 | 0.71 | 0.62 | 0.58 |
| 3 | 0.59 | 0.56 | 0.56 |
| 4 | 0.47 | 0.34 | 0.34 |
Table 12.
Class accuracy value of warping distance 15.
Table 12.
Class accuracy value of warping distance 15.
| Accuracy Value of Classes |
|---|
| Classes | k = 11 | k = 13 | k = 15 |
|---|
| 1 | 0.57 | 0.49 | 0.54 |
| 2 | 0.71 | 0.67 | 0.67 |
| 3 | 0.59 | 0.67 | 0.70 |
| 4 | 0.47 | 0.50 | 0.47 |
Table 13.
Class accuracy value of all k values.
Table 13.
Class accuracy value of all k values.
| Accuracy Value of k |
|---|
| k Value | Avg. Accuracy (%) |
|---|
| 5 | 51 |
| 7 | 52 |
| 9 | 51 |
| 11 | 59 |
| 13 | 58.25 |
| 15 | 60 |
Table 14.
Comparison of all deep learning models.
Table 14.
Comparison of all deep learning models.
| Model | Accuracy | Loss | Average Class Acc. (%) | Std. |
|---|
| Train | Test | Train | Test |
|---|
| RP (SoftMax) | 86 | 80 | 0.43 | 0.7 | 74.25 | 14.88 |
| RP (L2-SVM SGD) | 78 | 72 | 0.90 | 0.83 | 73 | 10.65 |
| RP (L2-SVM Adam) | 82 | 76 | 0.74 | 0.79 | 76 | 5.12 |
| GASF | 74 | 73 | 0.53 | 0.61 | 69 | 11.63 |
| GADF | 77.6 | 73.2 | 0.64 | 0.72 | 72 | 7.41 |
| LSTM | 60 | 58 | 0.64 | 0.70 | 58.25 | 9.53 |
| MTF | 49 | 42 | 1.18 | 1.23 | 38 | 13.75 |




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}