
Transmission Backlash Compensation and Grasping Force Estimation of Surgical Instruments for the Laparoscopic Minimally Invasive Surgery Robot

Abstract
:1. Introduction
2. Materials and Methods
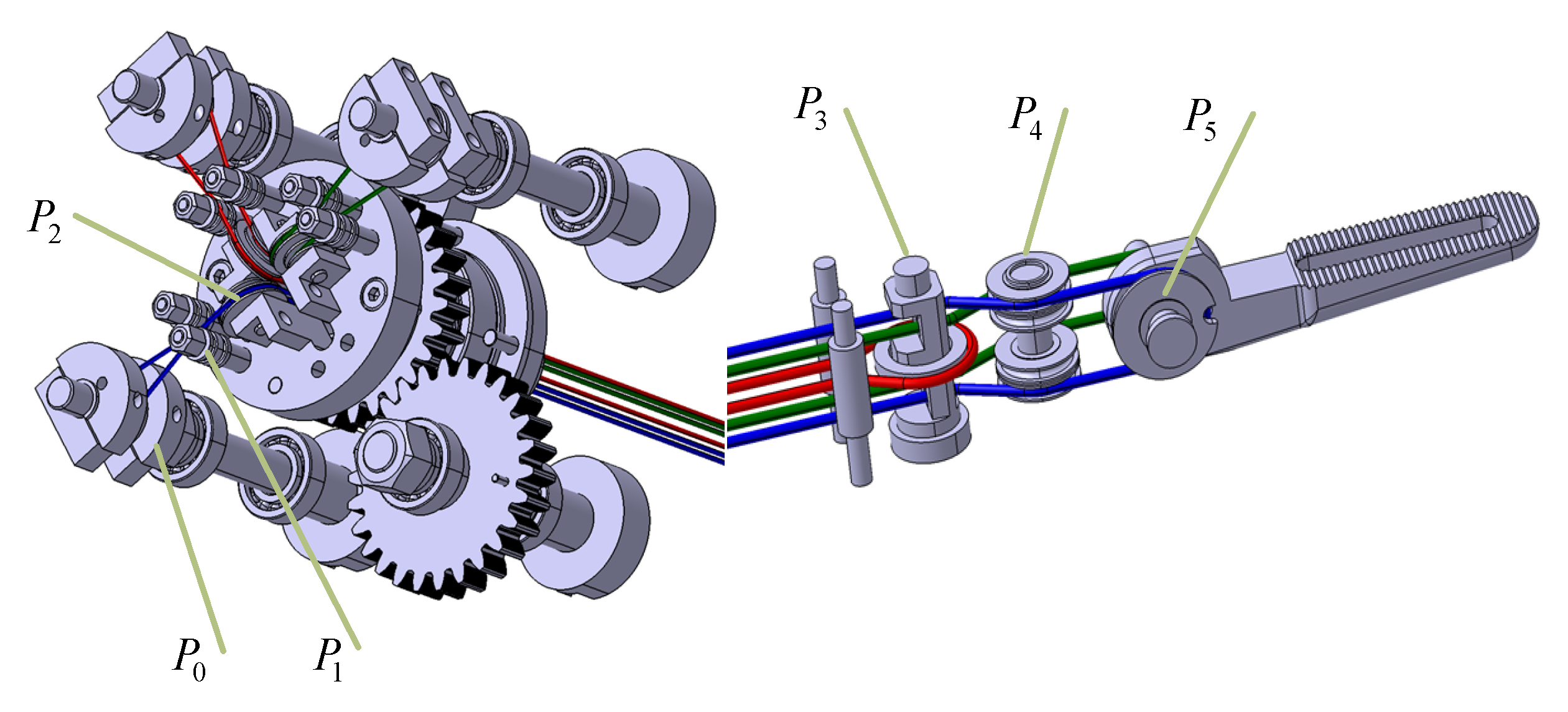
2.1. Single-Cable-Pulley Transmission
2.2. Displacement and Tension Transmission Characteristics of a Closed-Circuit Cable-Pulley System
- (1)
- The applied moment is always positive.
- (2)
- The cable in symmetrical configuration does not go slack.
- (3)
- The tension of all the infinitesimal cable segments is the same under initial pretension loads.
2.3. Closed-Circuit Cable-Pulley System Transmission Backlash and Grasping Force Estimation
2.3.1. Cable Elongation and Grasping Force of the Cable-Pulley System during the Working Phase
2.3.2. Cable Elongation and Grasping Force of the Cable-Pulley System during the Delay and Transition Phases
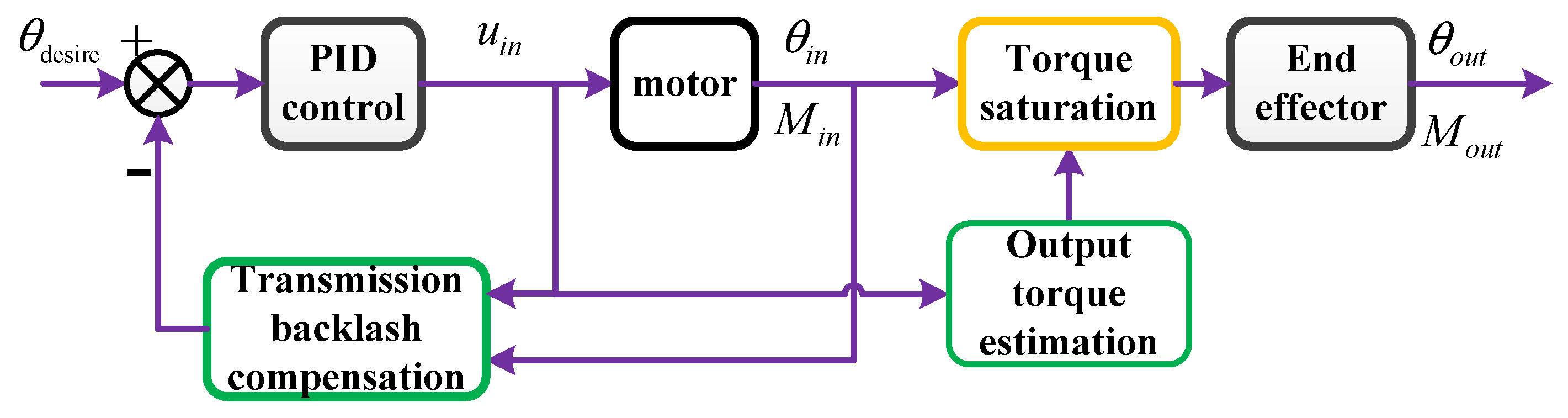
2.4. Feedforward Compensation Control for the Transmission Backlash of the Cable-Pulley System
3. Experiments and Results
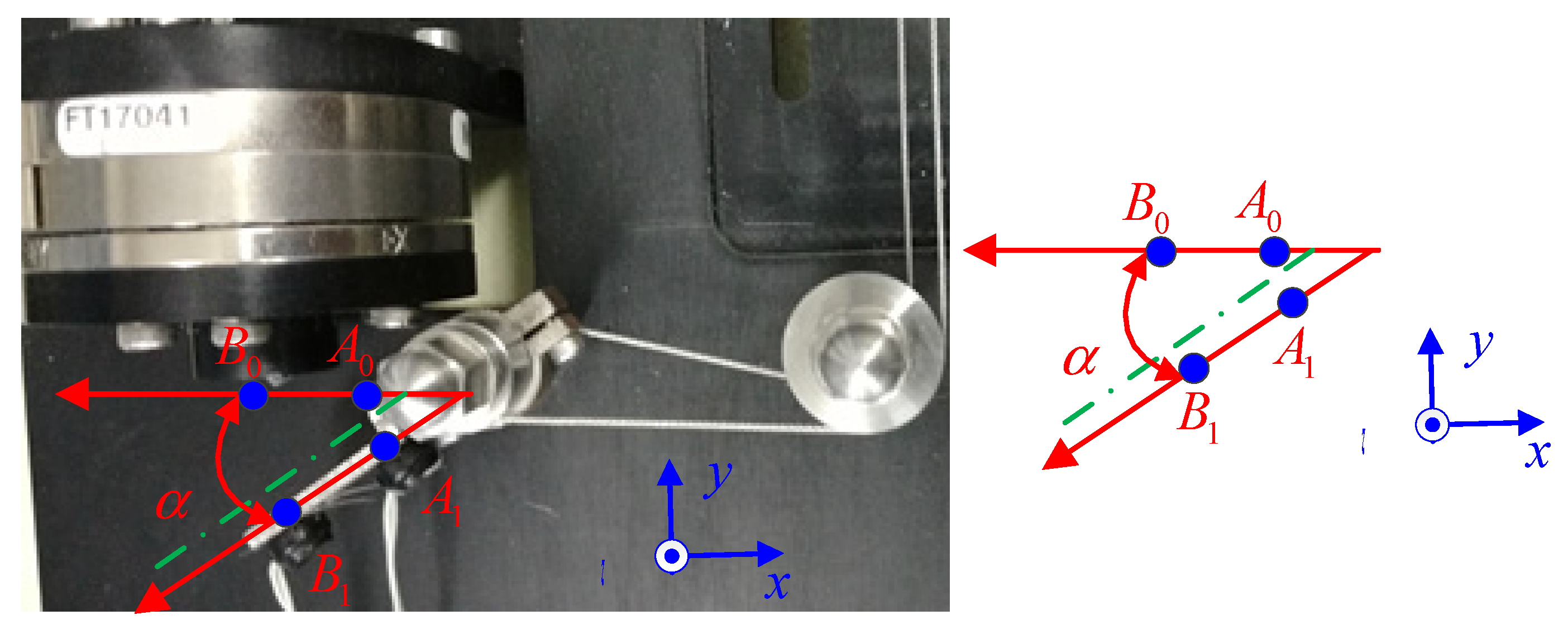
3.1. Experimental Setup
3.2. Measurement of the Output Displacement and Torque of the Distal Grasper of the Cable-Pulley System
3.3. Position and Grasping Force Control of the Distal Graspers of the Surgical Instrument with Transmission Backlash Compensation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guthart, G.; Salisbury, J. The Intuitive/sup TM/ telesurgery system: Overview and application. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings, San Francisco, CA, USA, 24–28 April 2000. [Google Scholar] [CrossRef]
- Mucksavage, P.; Kerbl, D.C.; Pick, D.L.; Lee, J.Y.; McDougall, E.M.; Louie, M.K. Differences in grasp forces among various robotic instruments and da Vinci surgical platforms. J. Endourol. 2011, 25, 523–528. [Google Scholar] [CrossRef] [PubMed]
- Breedveld, P.; Stassen, H.G.; Meijer, D.W.; Jakimowicz, J.J. Manipulation in Laparoscopic Surgery: Overview of Impeding Effects and Supporting Aids. J. Laparoendosc. Adv. Surg. Tech. 1999, 9, 469–480. [Google Scholar] [CrossRef] [PubMed]
- Abbott, D.J.; Becke, C.; Rothstein, R.I.; Peine, W.J. Design of an endoluminal NOTES robotic system. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007. [Google Scholar]
- Kencana, A.; Phee, S.; Low, S.; Sun, Z.; Huynh, V.; Ho, K.; Chung, S. Master and Slave Robotic System For Natural Orifice Transluminal Endoscopic Surgery. In Proceedings of the 2008 IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, China, 21–24 September 2008; pp. 296–300. [Google Scholar] [CrossRef]
- Kato, T.; Okumura, I.; Song, S.E.; Golby, A.J.; Hata, N. Tendon-Driven Continuum Robot for Endoscopic Surgery: Preclinical Development and Validation of a Tension Propagation Model. IEEE/ASME Trans. Mechatron. 2015, 20, 2252. [Google Scholar] [CrossRef] [Green Version]
- Breedveld, P.; Sheltes, J.; Blom, E.M.; Verheij, J.E.I. A new, easily miniaturized steerable endoscope. IEEE Comput. Graph. Appl. 2005, 24, 40–47. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnson, P.J.; Serrano, C.M.R.; Castro, M.; Kuenzler, R.; Choset, H.; Tully, S.; Duvvuri, U. Demonstration of transoral surgery in cadaveric specimens with the medrobotics flex system. Laryngoscope 2013, 123, 1168–1172. [Google Scholar] [CrossRef] [PubMed]
- Nagy, T.D.; Haidegger, T. Recent Advances in Robot-Assisted Surgery: Soft Tissue Contact Identification. In Proceedings of the 2019 IEEE 13th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 29–31 May 2019; pp. 99–106. [Google Scholar]
- Kaneko, M.; Yamashita, T.; Tanie, K. Basic considerations on transmission characteristics for tendon drive robots. In Proceedings of the Fifth International Conference on Advanced Robotics’ Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991. [Google Scholar] [CrossRef]
- Palli, G.; Melchiorri, C. Model and Control of Tendon-sheath Transmission Systems. In Proceedings of the Proceedings 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006. [Google Scholar]
- Palli, G.; Borghesan, G.; Melchiorri, C. Modeling, Identification, and Control of Tendon-Based Actuation Systems. IEEE Trans. Robot. 2012, 28, 277–290. [Google Scholar] [CrossRef]
- Do, T.; Tjahjowidodo, T.; Lau, M.; Phee, S. A new approach of friction model for tendon-sheath actuated surgical systems: Nonlinear modelling and parameter identification. Mech. Mach. Theory 2015, 85, 14–24. [Google Scholar] [CrossRef]
- Do, T.N.; Tjahjowidodo, T.; Lau, M.; Yamamoto, T.; Phee, S. Hysteresis modeling and position control of tendon-sheath mechanism in flexible endoscopic systems. Mechatronics 2014, 24, 12–22. [Google Scholar] [CrossRef]
- Kim, C.Y.; Lee, M.C.; Wicker, R.B.; Yoon, S.M. Dynamic modeling of coupled tendon-driven system for surgical robot instrument. Int. J. Precis. Eng. Manuf. 2014, 15, 2077–2084. [Google Scholar] [CrossRef]
- Chiang, L.S.; Jay, P.S.; Valdastri, P.; Menciassi, A.; Dario, P. Tendon Sheath Analysis for Estimation of Distal End Force and Elongation. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009. [Google Scholar]
- Agrawal, V.; Peine, W.J.; Yao, B. Modeling of Transmission Characteristics Across a Cable-Conduit System. IEEE Trans. Robot. 2010, 26, 914–924. [Google Scholar] [CrossRef]
- Wu, H.; Yin, M.; Xu, Z.; Zhao, Z.; Han, W. Transmission characteristics analysis and compensation control of double tendon-sheath driven manipulator. Sensors 2020, 20, 1301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Anooshahpour, F.; Yadmellat, P.; Polushin, I.G.; Patel, R.V. A motion transmission model for a class of tendon-based mechanisms with application to position tracking of the da vinci instrument. IEEE/ASME Trans. Mechatron. 2019, 24, 538–548. [Google Scholar] [CrossRef]
- Anooshahpour, F.; Yadmellat, P.; Polushin, I.G.; Patel, R.V. A motion transmission model for multi-DOF tendon-driven mechanisms with hysteresis and coupling: Application to a da Vinci® instrument. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and System, Vancouver, BC, Canada, 24–28 September 2017; pp. 5764–5769. [Google Scholar] [CrossRef]
- Jung, J.H.; Pan, N.; Kang, T.J. Generalized capstan problem: Bending rigidity, nonlinear friction, and extensibility effect. Tribol. Int. 2008, 41, 524–534. [Google Scholar] [CrossRef]
- Jung, J.H.; Pan, N.; Kang, T.J. Capstan equation including bending rigidity and non-linear frictional behavior. Mech. Mach. Theory 2008, 43, 661–675. [Google Scholar] [CrossRef]
- Lu, Y.F.; Hei, M.; Zhang, Z.Y.; Fan, D.P. Transverse Oscillation of Precise Cable Drive System. Key Eng. Mater. 2012, 522, 332–336. [Google Scholar] [CrossRef]
- Lu, Y.-F.; Fan, D.-P.; Liu, H.; Hei, M. Transmission capability of precise cable drive including bending rigidity. Mech. Mach. Theory 2015, 94, 132–140. [Google Scholar] [CrossRef]
- Miyasaka, M.; Matheson, J.; Lewis, A.; Hannaford, B. Measurement of the cable-pulley Coulomb and viscous friction for a cable-driven surgical robotic system. In Proceedings of the 2015 IEEE/RSJ international conference on intelligent robots and systems, Hamburg, Germany, 28 September–3 October 2015; pp. 804–810. [Google Scholar] [CrossRef]
- Miyasaka, M.; Haghighipanah, M.; Li, Y.; Matheson, J.; Lewis, A.; Hannaford, B. Modeling cable-driven robot with hysteresis and cable–pulley network friction. IEEE/ASME Trans. Mechatron. 2020, 25, 1095–1104. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, D.; Chen, B.; Yu, L.; Qian, J.; Zi, B. A clamping force estimation method based on a joint torque disturbance observer using PSO-BPNN for cable-driven surgical robot end-effectors. Sensors 2019, 19, 5291. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Y.; Pan, B.; Fu, Y.; Meng, M.Q.H. Grip Force Perception Based on dAENN for Minimally Invasive Surgery Robot. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019. [Google Scholar]
- Liang, Y.; Du, Z.; Wang, W.; Sun, L. A Novel Position Compensation Scheme for Cable-Pulley Mechanisms Used in Laparoscopic Surgical Robots. Sensors 2017, 17, 2257. [Google Scholar] [CrossRef] [PubMed]
- Liang, Y.; Du, Z.; Wang, W.; Yan, Z.; Sun, L. An improved scheme for eliminating the coupled motion of surgical instruments used in laparoscopic surgical robots. Robot. Auton. Syst. 2019, 112, 49–59. [Google Scholar] [CrossRef]
- Li, Y.; Miyasaka, M.; Haghighipanah, M.; Cheng, L.; Hannaford, B. Dynamic modeling of cable driven elongated surgical instruments for sensorless grip force estimation. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–22 May 2016; pp. 4128–4134. [Google Scholar] [CrossRef] [PubMed]
- Xue, R.; Du, Z.; Yan, Z.; Ren, B. An estimation method of grasping force for laparoscope surgical robot based on the model of a cable-pulley system. Mech. Mach. Theory 2019, 134, 440–454. [Google Scholar] [CrossRef]
- Xue, R.; Ren, B.; Yan, Z.; Du, Z. A cable-pulley system modeling based position compensation control for a laparoscope surgical robot. Mech. Mach. Theory 2017, 118, 283–299. [Google Scholar] [CrossRef]
- Park, J.W.; Oh, A.G. Bending rigidity of yarns. Text. Res. J. 2006, 76, 478–485. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Specification | Part | Specification |
|---|---|---|---|
| Medical steel cable | 7 × 7 mm, Φ0.54 mm, Carl Stahl Corp. | Optical positioning and tracking system | NDI Polaris |
| ELMO driver | ELMO Corp. | Six-dimensional force sensor | ATI min45 |
| Gmax controller | EtherCAT protocol, ELMO Corp. | Cable-pulley system | Single-degree-of-freedom |
| DCX 16S motor | Reduction ratio 44:1, maxon Corp. | Digital dynamometer ZP-200 | Range 200 N |
| 3.700 | 38.500 | 7.000 | 5.000 | ||||
| 0.279 | 185.000 | 4.000 | 5.000 | ||||
| 1.571 | 85.000 | 8.000 | 2.500 | ||||
| 3.141 | 85.000 | 5.000 | 1 | 1.684 × 104 | |||
| 3.217 | 39.900 | 5.000 | 0.540 | ||||
| 3.390 | 38.700 | 8.000 | 0.157 | ||||
| 3.320 | 0.560 | 8.000 |
| Pulley | Slip Angle (Rad) | Tension Ratio (Rotatable) | Tension Ratio (Fixed) | Wrap Angle (Rad) |
|---|---|---|---|---|
| 0.051 | 1.006 | 1.098 | 0.279 | |
| 0.051 | 1.006 | 1.098 | 0.279 | |
| 0.129 | 1.047 | 2.130 | 1.571 | |
| 0.206 | 1.072 | 2.025 | 1.571 | |
| 0.291 | 1.115 | 4.213 | 3.141 | |
| 0.182 | 1.074 | 4.622 | 3.141 | |
| 0.182 | 1.074 | 4.796 | 3.217 | |
| 0.290 | 1.114 | 4.739 | 3.390 |
| Pretension (N·m) | MaxPosErr 1 (Rad) | AvgPosErr 1 (Rad) | MaxTorqueErr 1 (N·m) | AvgTorqueErr 1 (N·m) |
|---|---|---|---|---|
| 12.5 | 0.342 | 0.1436 | 0.196 | 0.041 |
| 50 | 0.323 | 0.1368 | 0.182 | 0.052 |
| 150 | 0.354 | 0.1538 | 0.201 | 0.073 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, S.; Li, G.; Huang, Y. Transmission Backlash Compensation and Grasping Force Estimation of Surgical Instruments for the Laparoscopic Minimally Invasive Surgery Robot. Appl. Sci. 2022, 12, 12126. https://doi.org/10.3390/app122312126
Zou S, Li G, Huang Y. Transmission Backlash Compensation and Grasping Force Estimation of Surgical Instruments for the Laparoscopic Minimally Invasive Surgery Robot. Applied Sciences. 2022; 12(23):12126. https://doi.org/10.3390/app122312126
Chicago/Turabian StyleZou, Shuizhong, Guozhi Li, and Yuan Huang. 2022. "Transmission Backlash Compensation and Grasping Force Estimation of Surgical Instruments for the Laparoscopic Minimally Invasive Surgery Robot" Applied Sciences 12, no. 23: 12126. https://doi.org/10.3390/app122312126