1. Introduction
With the development of information technology, an increasing number of intelligent applications have started to appear. Within this trend, a large number of intelligent applications build intelligent systems, such as the “smart city” mentioned in the literature [
1], which can maximize the use of limited resources to manage the city with high quality. However, as an intelligent system, it needs enough information to make reasonable judgments, but information is diverse; sounds, pictures, and smells are all information, and to obtain them is just like the human sensing process. Thus, various sensors are designed to implement a certain function of human sensing; for example, a camera is like an eye to get visual information. However, intelligent systems are not limited to this; they can see much more. While cameras are affected by lighting conditions and do not have the ability to penetrate, there are technologies that are not affected by lighting and can penetrate the surface to see the essence, such as X-rays, which can see the state of a patient’s internal organs. The literature [
2,
3] illustrates the value that this imaging technique brings to intelligent systems, where capturing the information, aided by AI techniques, allows for a quick and accurate determination of the disease. Its non-contact characteristic is more valuable in the background of COVID-19 ravaging the world. However, X-rays are expensive and radioactive, limiting the environment in which they can be applied. Therefore, intelligent systems need cheaper and safer RF imaging technology to meet a wider range of application environments.
As an advanced application in the field of wireless sensing, RF imaging has received a lot of attention, and the introduction of “wireless vision” in [
4] indicates that RF imaging has become a new research hotspot in the field of wireless sensing, which requires finer sensing granularity than most sensing fields. However, the development of RF imaging has not been smooth and has long been constrained by insufficient imaging resolution and aperture. Currently, mmWave-based SAR imaging technology has the advantages of greater imaging bandwidth and stronger imaging aperture expansion, and has become one of the enabling technologies for RF imaging to meet fine-grained sensing needs in near-field conditions. There have been many studies based on millimeter-wave SAR imaging technology. Various millimeter-wave SAR near-field imaging systems developed in the literature [
5,
6,
7,
8,
9,
10] were successfully used for security screening. The authors of [
11] developed a simple 77 GHz millimeter wave SAR near-field imaging system using a commercial millimeter-wave radar and rails. In the literature [
12], a low-cost 24 GHz millimeter-wave SAR near-field imaging system was implemented using Hilbert transform to compensate for the real signal. Although the available studies have reduced the system cost and improved the imaging quality, there are still some challenges.
SAR uses the time-for-space tactics, which makes its data acquisition time long. Sometimes, in order to quickly verify the imaging method, data have to be acquired under Sparsely-Sampled conditions. This generates ghost image and is not conducive to the analysis of imaging results, so it is necessary to suppress ghost image under Sparsely-Sampled conditions. The authors of [
13] solve the Sparsely-Sampled ghost image problem under MIMO (Multiple Input Multiple Output) conditions, but does not address the problem under SISO (Single Input Single Output) conditions. The work in this paper still addresses the case of uniform sampling. In addition to the uniform sampling technique, the authors of [
14] use a non-uniform hybrid sampling technique to construct a SAR imaging system that achieves high-resolution imaging. In addition, the work in this paper is performed for the Analytic Fourier Transform algorithm, while in [
15] it is performed for the Frequency Scaling algorithm (FSA), and the FSA is improved to eliminate the impact of the aliasing effect. In addition, in order to obtain as much information as possible, it is often necessary to project multiple targets that are in neighboring different distance planes onto one distance plane, which is not available in conventional imaging algorithms and requires more processing steps, so a one-step projection method can greatly reduce the workload. The problem of projecting multiple targets at different distances planes to the same distance plane was solved in the literature [
16,
17] using the Maximum Projection method, but it requires a combination of multiple results to achieve this, which cannot be achieved in one step.
In summary, there are still many challenges in the field of millimeter-wave SAR imaging, especially the ghost image problem of SISO Sparsely-Sampled and the projection problem of multiple targets at different distances. Therefore, this paper addresses these challenges and does related research, and the contributions made are as follows.
A simple millimeter-wave near-field SAR imaging system is developed with an easy-to-build “T” structure for the rail part, and the complexity of the radar part is reduced by using the SISO, monostatic approach.
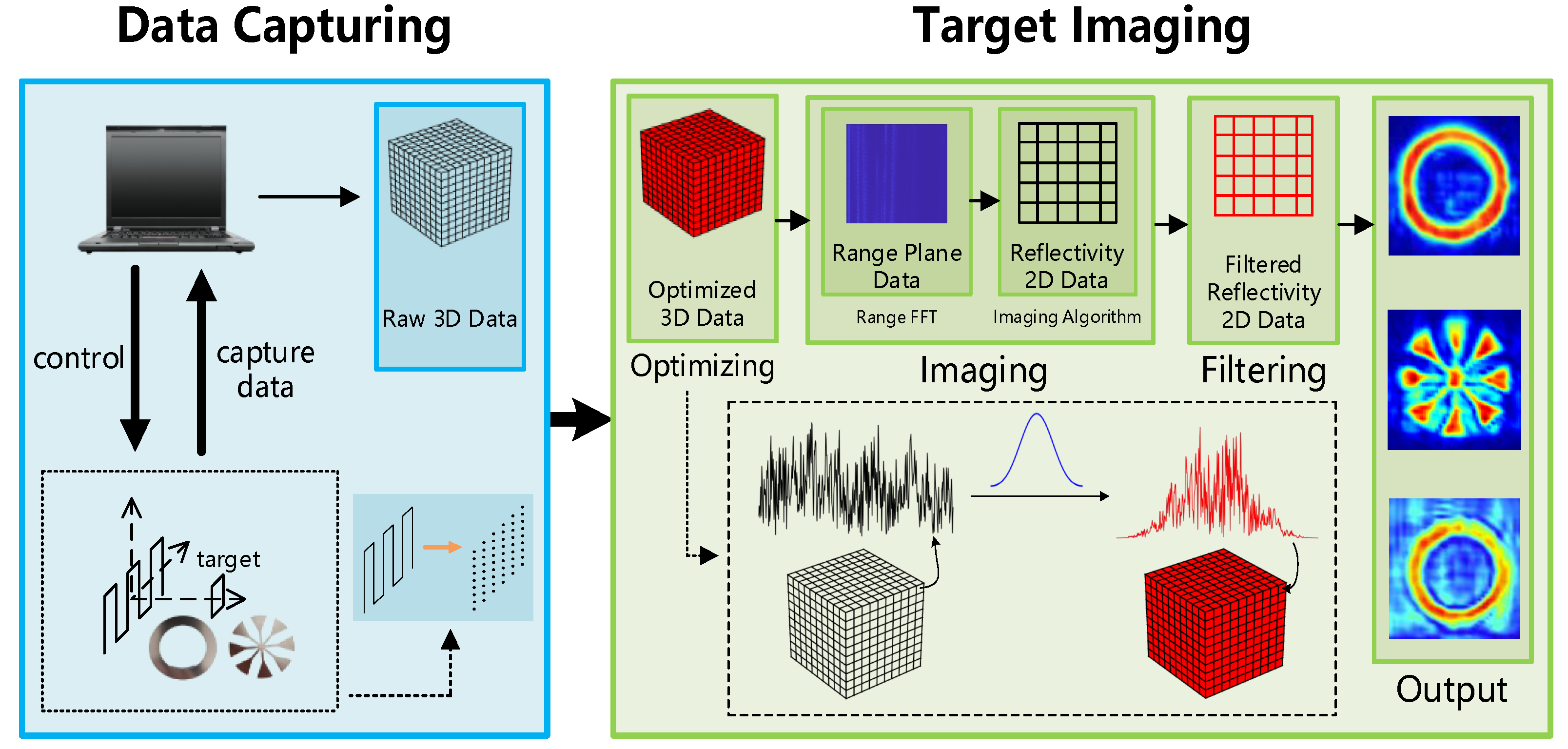
A robust millimeter-wave SAR imaging method is proposed, including three parts: windowing, imaging, and noise reduction. The Blackman Window used aims at the projection problem of multiple targets at different distances, the Analytic Fourier Transform imaging algorithm used aims at ghost image under SISO Sparsely-Sampled, and the Mean Filter used aims at spatial noise.
We have conducted a large number of imaging experiments, and the results show that the mmSight can image a single target with Fully-Sampled, a hidden target, and multiple targets at the same distance, in addition to solving the ghost image problem under SISO Sparsely-Sampled conditions and the projection problem of multiple targets at different distances, which indicates that the mmSight enhances the robustness of the imaging system.
This paper consists of five sections.
Section 2 introduces the work related to millimeter wave imaging;
Section 3 details the proposed imaging method, which mainly contains two parts: data acquisition and target imaging;
Section 4 shows the experimental platform, experimental results, and also evaluates the experimental results;
Section 5 concludes the paper.
4. Experiment and Evaluation
This section describes the platform, parameters, results, and evaluation related to the experiments. The first part introduces the system platform; the second part lists the parameters used in each experiment and explains them; the third part shows the results of five sets of experiments; the fourth part evaluates the algorithm performance with PSF (point spread function) and IE (Image Entropy).
4.1. Experimental Platform
The experimental platform in this paper is shown in
Figure 5, which contains three parts: scanning platform, radar platform, and upper computer. The scanning platform mainly consists of two slide rails, which are used to drive the radar to move to different spatial sampling points; the radar platform is composed of an IWR1642BOOST development board and a DCA1000EVM data acquisition card, which are mainly used to send and receive radio signals in millimeter wave band in real-time at each spatial sampling point. The upper computer uses MATLAB internally to automate the control of the scanning platform and the radar platform and to process the collected data.
4.2. Experimental Setup
4.2.1. Chirp Parameters
Millimeter-wave radar uses the principle of FMCW, which requires the setting of FMCW parameters, as shown in
Table 2. the starting frequency of the Chirp signal is set according to the operating band of the radar used, and the operating band supported by IWR1642 is 77~81 GHz. the theoretical resolution [
11] of imaging is related to the wavelength, and the wavelength is related to the frequency, and their relationship is
, where
is the speed of light. Therefore, the higher the frequency, the smaller the wavelength, and accordingly, the smaller the resolution value, the stronger the resolution ability. In addition, according to the description of bandwidth in the literature [
30]:
, the slope of the Chirp signal, and the number of samples, together determine the bandwidth that can be used. From the formula introduced in the literature [
30]:
, it is known that the larger the bandwidth, the higher the distance resolution obtained. Since the operating mode used by the radar supports a maximum sampling rate of 6250 ksps, 6200 ksps was chosen, and according to the signal processing knowledge, it is known that the higher the sampling rate, the closer the digitized signal is to the original analog signal.
4.2.2. Rail Parameters
The parameter settings of the rail affect the size of the virtual aperture, which are shown in
Table 3. The number of horizontal sampling points and the number of vertical sampling points determine the number of spatial sampling points needed in each direction, respectively. The horizontal sampling interval and vertical sampling interval need to satisfy the spatial sampling criterion, otherwise, ghost image will be generated, and if only a single direction is not satisfied, only that direction will generate ghost image, and the authors of [
13] deduce the nonlinear relationship between ghost image and original image. The virtual aperture size of a direction is obtained by (the number of that direction sampling points −1) × that direction sampling interval. If the virtual aperture size is greater than or equal to the target size and the target is in its coverage area, the whole target can be imaged, otherwise only a part of the target can be imaged.
4.3. Experimental Result
The experiment process is like this. First, the radar platform, the rail platform, and the upper computer platform, are ready and wired to each other. Then, according to the target size, we determine the required aperture size, and also determine the distance between the two planes, place the target at the center of the aperture, and after that let the rail return to the zero position. Finally, we open mmWave Studio inside the upper computer and set up the parameters in
Section 4.2.1, then open MATLAB and run the specially written program to set up the parameters in
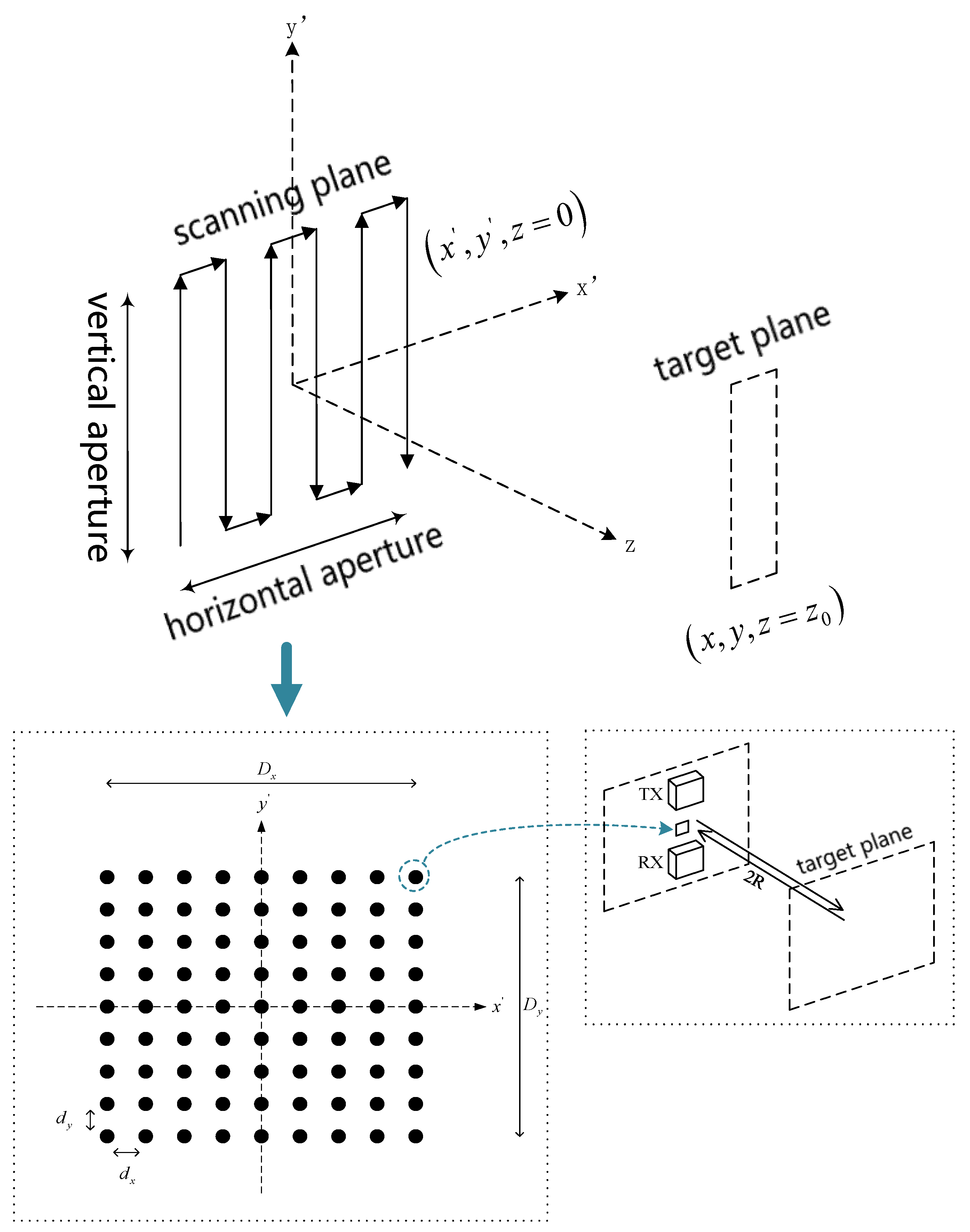
Section 4.2.2 according to the scene requirements. Once the setup is complete, the data capturing begins. In the process of capturing, the radar is first scanned along the columns, and after a column is fully scanned, it is then scanned one step along the rows, followed by the next column, and the final trajectory, as shown in the top of
Figure 2. The scanning method used in this paper is discrete, i.e., “one move, one stop”, when stopping, the radar works and sends and receives signals, when moving, the radar does not work, and finally data are collected at each sampling point shown in the bottom left of
Figure 2.
4.3.1. Single Target Imaging
(1)
Fully-Sampled Single Target. In order to verify the feasibility of the mmSight, a single target is imaged with Fully-Sampled, the parameters are the same as those set in
Section 4.2, the distance from the target plane to the array plane (
) is 110 mm, and the number of horizontal sampling points and vertical sampling points are both 41, so that the virtual aperture size is 80 mm × 80 mm, which can cover the target of size 60 mm × 60 mm. The optical image of the circle target is shown in
Figure 6a, and the imaging results are shown in
Figure 6c. It can be seen that the algorithm has high imaging quality for the circle target and accurate contour restoration. The star target optical image is shown in
Figure 6b, and the imaging results are shown in
Figure 6d. The star target is more complex than the circle target, and the algorithm, although the general outline is accurately restored, for the detailed part, the restoration is insufficient. In particular, the part connecting the periphery and the center is not well resolved in this part because its width is smaller than the spatial sampling interval (2 mm). In addition, there is a certain amount of spatial noise accompanying it.
(2)
Sparsely-Sampled Single Target. Sometimes, to quickly verify the feasibility of the algorithm, it is necessary to image in the case of Sparsely-Sampled, but this produces ghost image, and the general research mostly uses the MIMO approach to avoid ghost image by converting Sparsely-Sampled under SISO to Fully-Sampled under MIMO, but MIMO increases the complexity of the system, so it is more necessary to study the avoidance of ghost image in the case of Sparsely-Sampled under SISO. Therefore, in this paper, based on the Fully-Sampled single-target imaging experiments, the rail parameters are modified and the corresponding Sparsely-Sampled experiments are performed.
Figure 7 shows the horizontal and vertical directions are both Sparsely-Sampled (horizontal sampling interval and vertical sampling interval are 4 mm, which does not satisfy the spatial sampling criterion, the number of horizontal and vertical sampling points is 21, and the virtual aperture size is 80 mm × 80 mm, which can cover the target), where the mmSight (
Figure 7a) gets the imaging effect close to fully-sampled and does not produce ghost image, while the Back Projection (
Figure 7b) and Matched Filter (
Figure 7c) imaging algorithms produce ghost image in the horizontal and vertical directions.
Figure 8 shows the case of Sparsely-Sampled in the vertical direction only (horizontal sampling interval is 2 mm, vertical sampling interval is 4 mm, the number of horizontal sampling points is 41, the number of vertical sampling points is 21, the virtual aperture size is 80 mm × 80 mm, which can cover the target), where the mmSight (
Figure 8a) obtained the imaging effect of nearly Fully-Sampled, which did not produce ghost image, and the Back Projection (
Figure 8b), and Matched Filter (
Figure 8c) imaging algorithms produced ghost image only in the vertical direction. In the case of Sparsely-Sampled, the mmSight is based on the Analytic Fourier Transform, compared to the Back Projection, Matched Filter, which effectively avoids the generation of ghost image.
4.3.2. Hidden Target Imaging
The mmSight, using the obtained echo data, solves the reflectivity of the object, so the stronger the reflectivity of the object’s material, the better the imaging effect, while the weaker the reflectivity of the object’s material, the worse the imaging effect, in order to verify this, the imaging experiment of the hidden target was conducted. Most of the parameter settings of this experiment are consistent with the first group of
Section 4.3.1, but the number of horizontal sampling points and vertical sampling points are both set to 51, making the virtual aperture size of 100 mm × 100 mm, in addition to being able to cover the target, but also cover part of the carton.
Figure 9a,b show the experimental scenarios, and
Figure 9c shows the imaging results. From the results, it can be seen that the millimeter wave penetrated the carton and was reflected by the metal with a circle shape.
4.3.3. Multiple Targets Imaging
(1)
Same-Distance Multiple Targets. In real scenarios, there are usually multiple targets, and making a distinction between multiple targets and imaging them separately and accurately is more complex than in a single-target scenario. In addition, more targets also require larger apertures, longer sampling times, and higher requirements for the stability of the system, making it necessary to conduct experiments related to multiple targets. Most of the parameter settings in this experiment are consistent with the first group in
Section 4.3.1, but the distance (
) from the target plane to the array plane is 87 mm, the number of horizontal sampling points is 81 and the number of vertical sampling points is 41, making the virtual aperture size 160 mm × 80 mm, which can cover two targets. The multi-targets scenario, imaging results are shown in
Figure 10. From the results, it can be seen that different targets are distinguished in the same distance plane. However, because the distance between the two planes (87 mm) was shortened than
Section 4.3.1 Experiment one (110 mm), according to the literature [
11] Equation (13), the interval of the spatial sampling criterion also became smaller, so the original sampling interval of 2 mm, does not meet the new sampling criterion requirements for the Back Projection (
Figure 10b), Matched Filter (
Figure 10c), results of them appeared unwanted spatial noise, while the Analytic Fourier Transform (
Figure 10d) and the mmSight (
Figure 10e) are unaffected and still maintain high-quality imaging results.
(2)
Different-Distance Multiple Targets. For multiple targets in the same distance plane, only a large aperture needs to be set, but for targets in different distance planes, the algorithm often focuses on a single distance plane only, resulting in poor imaging of targets in other distance planes. In this regard, the literature [
16,
17] proposed the maximum projection approach to integrate targets from multiple planes, but this requires imaging for each plane and finally projection, which has more steps, while the mmSight in this paper can take into account multiple planes at once, which greatly reduces the workload compared to the projection method. Most of the parameters set in this experiment are consistent with the first group of
Section 4.3.3. The distance from the plane where the star target is located to the array plane is 108 mm, while the distance from the plane where the circle target is located to the array plane is 135 mm, and the difference between the planes where the two targets are located is 27 mm, as shown in
Figure 11a. The final results are shown on the right side of
Figure 11. The mmSight (
Figure 11e) can take into account the targets of other secondary distance planes, and the result, which is close to that of the dual targets of the same distance plane, is one of its advantages over the Analytic Fourier Transform (
Figure 11d). In addition, since the inter-plane distance is 108 mm, which is farther than the 87 mm distance of the previous experiment, Back Projection (
Figure 11b) and Matched Filter (
Figure 11c), do not appear ghost image, but the residual spatial noise of them is still more.
In addition, we made a comparison with the work in literature [
31,
32], as shown in
Figure 12,
Figure 13,
Figure 14 and
Figure 15.
Figure 12, the primary target is the metal sheet, and the secondary target is the bracket. From the results, it can be seen that mmSight images the bracket better than the other algorithms, but the projection is not as good as
Figure 11e because of the large distance between the two targets, which exceeds the 27 mm set in the previous experiment.
Figure 13 considers the hidden, different-distances projection problem together, and it can be seen that mmSight’s projection of the secondary target (top left, distance 260 mm) plane to the primary target (bottom right, distance 320 mm) plane is better than the other algorithms, but again, the projection is not as good as
Figure 11e because of the larger distance difference (60 mm). Also, mmSight still outperforms the other algorithms for spatial noise cancellation.
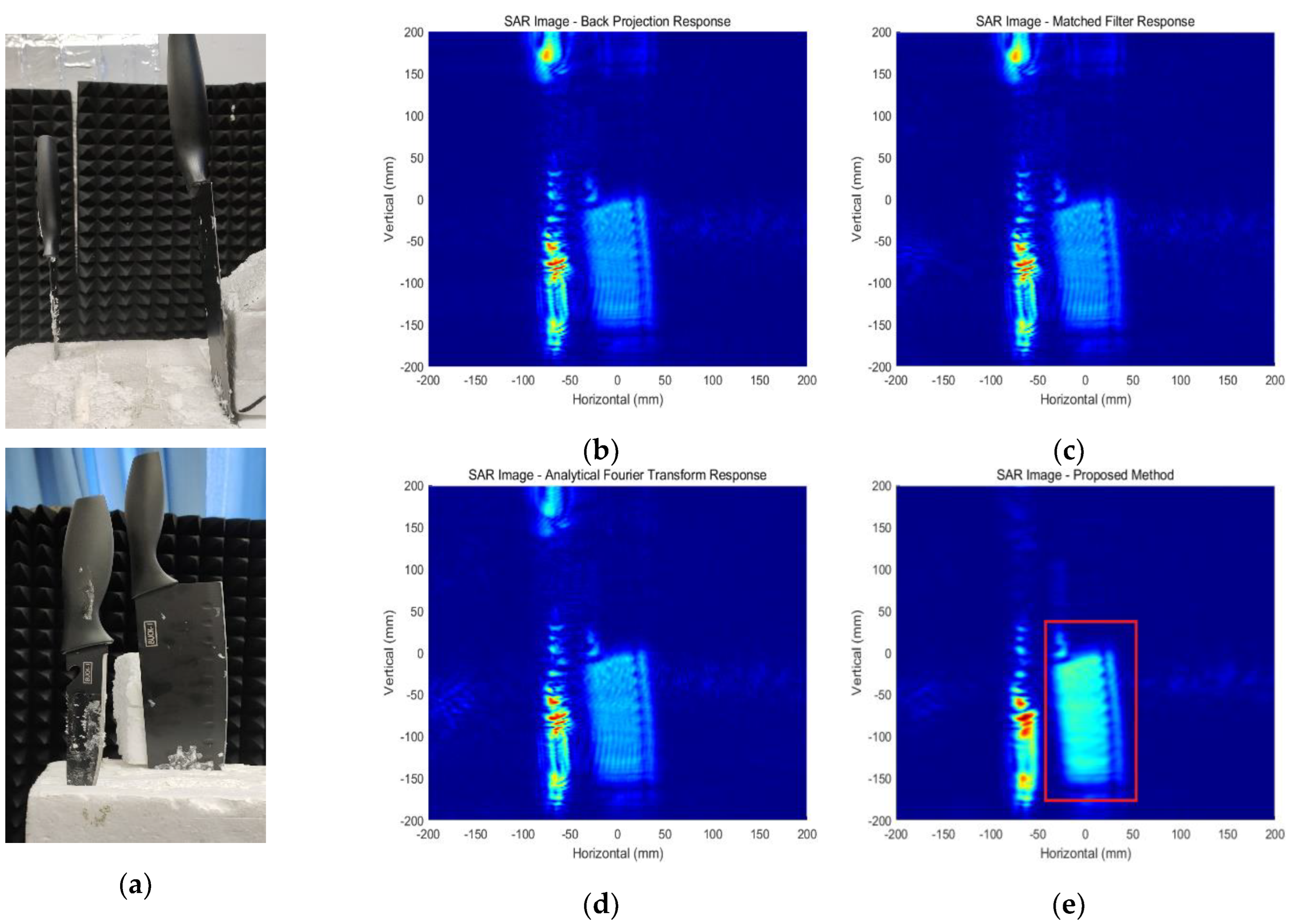
Figure 14, the distance between the dagger (550 mm) and the knife (585 mm) is 35 mm.
Figure 15, the distance between the pistol (550 mm) and the knife (600 mm) is 50 mm. This also shows that the larger the spacing is, the worse the projection effect is.
4.4. Experimental Evalution
In the field of image processing, a pixel is the smallest unit that constitutes an image, and accordingly, in the field of RF imaging, the point target imaging result is equivalent to a pixel and is the smallest unit that constitutes the imaging result, and the analysis of the point target contributes to the analysis of the imaging quality. Therefore, in this paper, the mmSight will be evaluated in terms of the Image Entropy (IE) and Point Spread Function (PSF) corresponding to the point target.
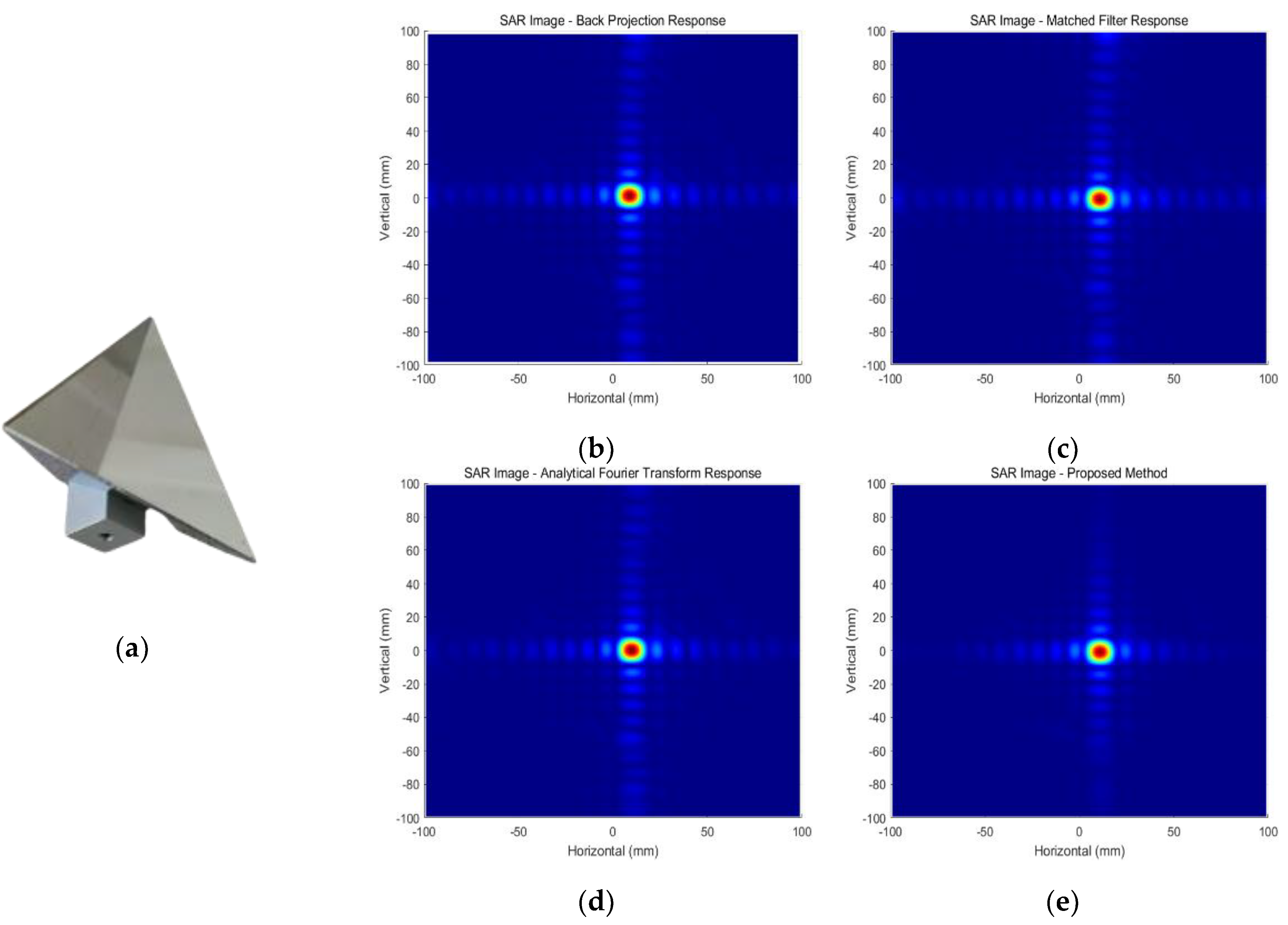
4.4.1. Point Target
In this paper, a corner reflector is used as a point target, which is placed at a distance of 200 mm from the scanning plane, and other parameters are the same as experiment one in
Section 4.3.1, and then imaging the corner reflector. The corner reflector is shown in
Figure 16a. The obtained point target imaging results are shown on the right side of
Figure 16.
4.4.2. Image Entropy
The quantitative evaluation is first performed using Image Entropy (IE), which is calculated as shown in Equation (16) [
17], where
denotes the pixel of the reconstructed image. The smaller the entropy value, the better the focusing performance of the image, and the better the image quality.
Table 4 shows the Image Entropy corresponding to the target of
Figure 16, from which it can be seen that the Proposed imaging algorithm has the best result, the Analytic Fourier Transform has the second best result, while Back Projection and Matched Filter have slightly worse results.
4.4.3. Point Spread Function
An evaluation is undertaken using the Point Spread Function (PSF), which is essentially the impulse response of the imaging system. The imaging algorithm can be evaluated by observing its trend of sidelobe change and the strength of the background noise. The larger the sidelobe, the more likely it is to produce ghost image; the stronger the background noise, the more useless information in the image.
The Point Spread Function can be obtained after normalizing the point target imaging results, and the results are shown in
Figure 17, from which it can be seen that the differences among the four algorithms are mainly in the sidelobe. Among them, the sidelobe of the mmSight and the Analytic Fourier Transform decrease gradually from the main peak to the edge. The sidelobe of Back Projection and Matched Filter from the main peak to the edge, decreasing first and then increasing. In addition, the mmSight in this paper has the best suppression effect on edge-sidelobe, followed by Analytic Fourier Transform, Back Projection and Matched Filter are worse. This is also the reason why Back Projection and Matched Filter tend to produce a ghost image. Finally, it can be seen from the figure that the difference between the main peak amplitude and the background amplitude of the mmSight is large, so the spatial noise is effectively suppressed. Analytic Fourier Transform is the next best, while Back Projection and Matched Filter are worse.
6. Conclusions
In this paper, we propose a millimeter wave near-field SAR imaging algorithm called mmSight. The original data are optimized using Blackman window, which facilitates the mapping of multiple targets at different distances. The optimized data are processed using Analytic Fourier Transform algorithm, which can effectively avoid ghost image. The imaging results are processed using mean filtering to remove spatial noise. The penetration of millimeter wave is used to achieve the detection of hidden targets. In the IE of point target imaging results, mmSight obtained a value of 4.6157, which is 0.2267 lower than the Analytic Fourier Transform, 0.3919 lower than the Back Projection, and 0.3932 lower than the Matched Filter. For PSF, mmSight’s sidelobe and noise are smaller than those of other algorithms. The experimental results show that mmSight can achieve robust, high-quality imaging under near-field conditions compared to other common SAR imaging algorithms. In the future, we hope to further promote the miniaturization of RF imaging devices, and further study real-time, high-resolution, no outside device-dependent, material-independent imaging, and further study the effect of irregular sampling on imaging, and try to further expand the application scope of millimeter wave imaging technology.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}