
Feature Extraction of Bearing Weak Fault Based on Sparse Coding Theory and Adaptive EWT

Abstract
:1. Introduction
2. Sparse Coding Algorithm Based on Optimized LWD and FSS
2.1. Shift Invariant Sparse Coding
2.2. Solving Sparse Coefficient Based on FSS
- Initialize the collection. Input signal y, redundant dictionary D, initialization sparse coefficient and its corresponding sign , .
- Search for in the coefficient whose value is zero, and incorporate satisfying the following conditions into the active set:
- If , then ;
- If , then ;
- Feature sign steps
- 4.
- View the best conditions
- If , all holds, then check condition b, otherwise, return to step 3;
- If , all hold, then output coefficient s, otherwise return to step 2.
2.3. Laplace Wavelet Dictionary and Parameter Determination
3. AEWT Based on Optimized Component Screening
3.1. EWT
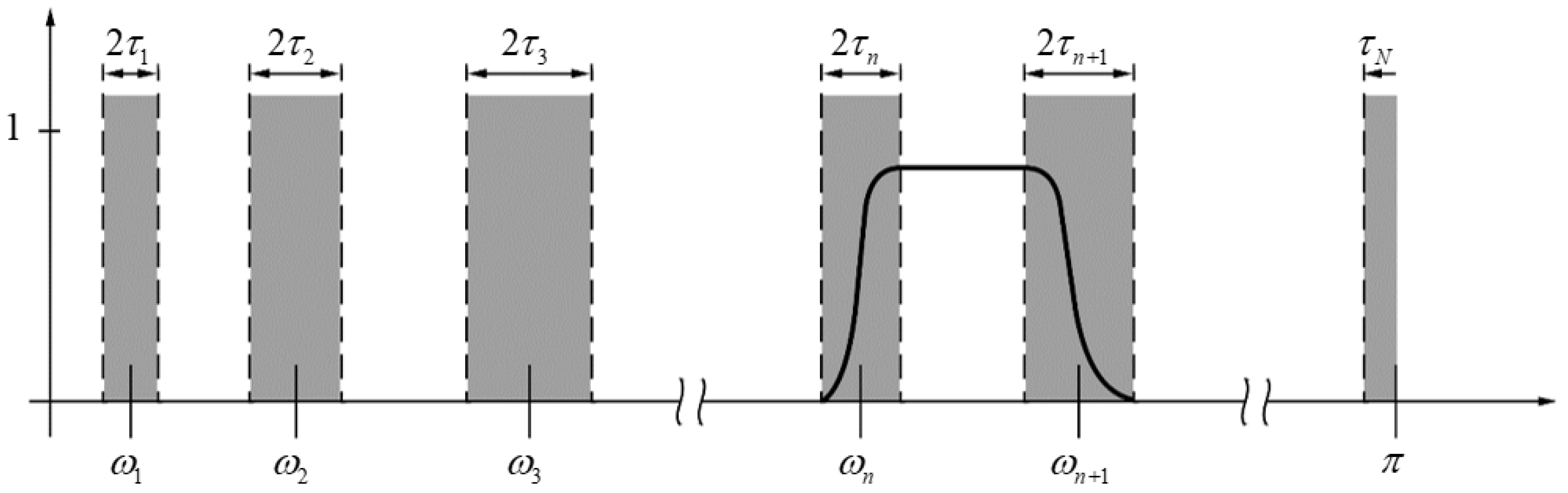
3.2. Spectrum Segmentation Based on Scale Space Method
3.3. Component Screening Based on KSES and CN
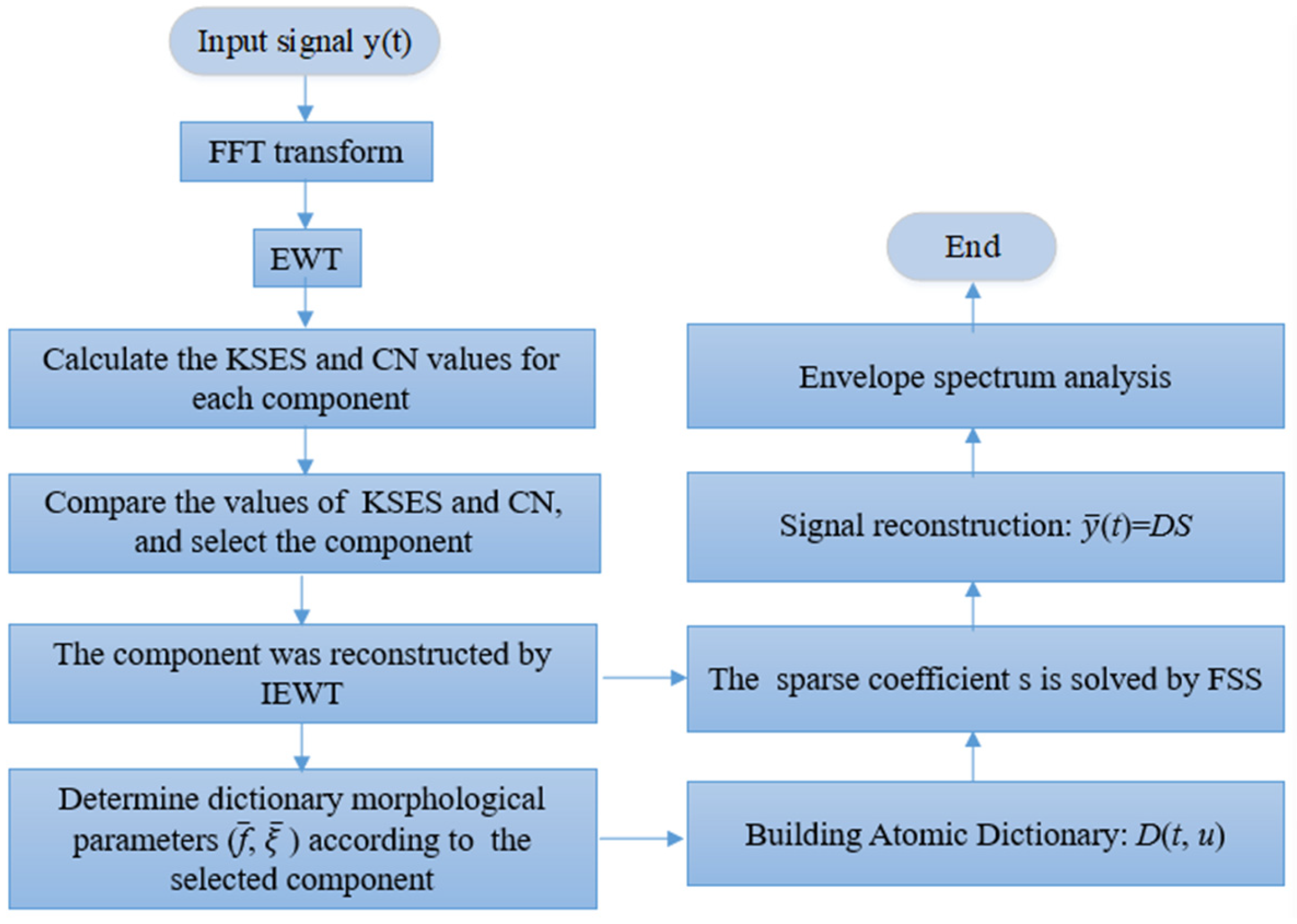
4. Algorithm Implementation Process
- (1)
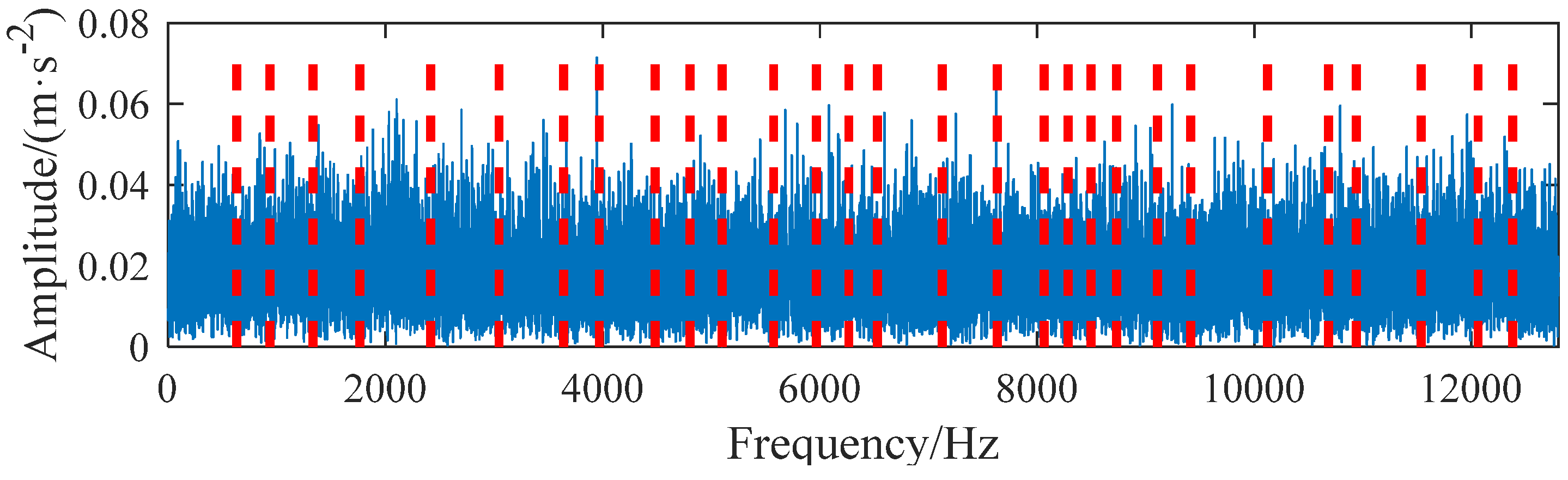
- Firstly, the signal is transformed by FFT to obtain the Fourier spectrum. Then, the scale space method based on a rule of thumb is utilized to segment the spectrum adaptively, and the dividing points of each frequency band are obtained. Based on this, a wavelet filter bank is designed to decompose the signal and obtain component signals.
- (2)
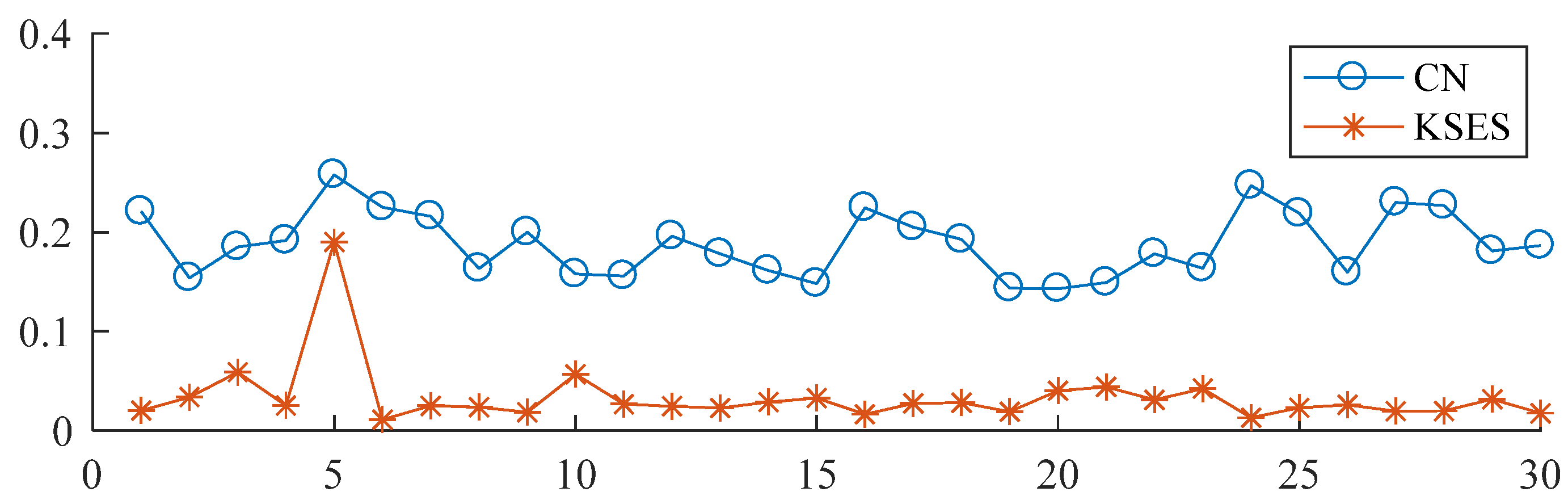
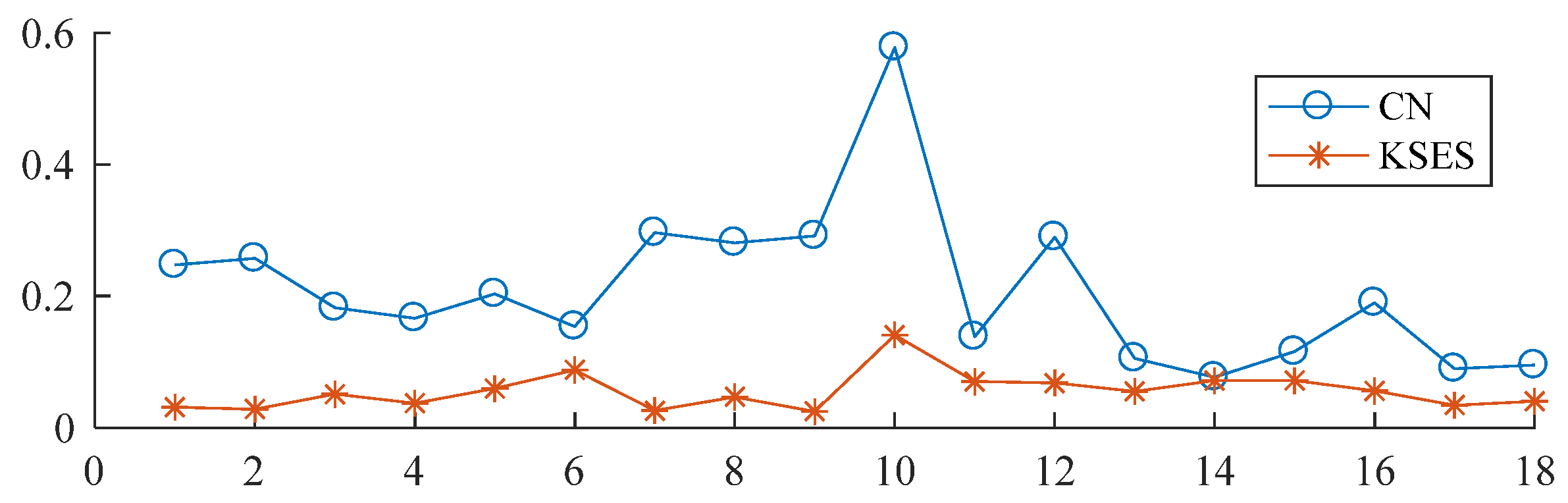
- The KSES of each signal component and the cross-correlation coefficient with the original signal are calculated. The component with the highest KSES value and CN value is selected. According to the spectrum segmentation map, the resonance frequency band corresponding to the selected component is checked to see if it is segmented to determine whether it is necessary to merge the adjacent components. The selected components are inversely transformed by an empirical wavelet to obtain the signal .
- (3)
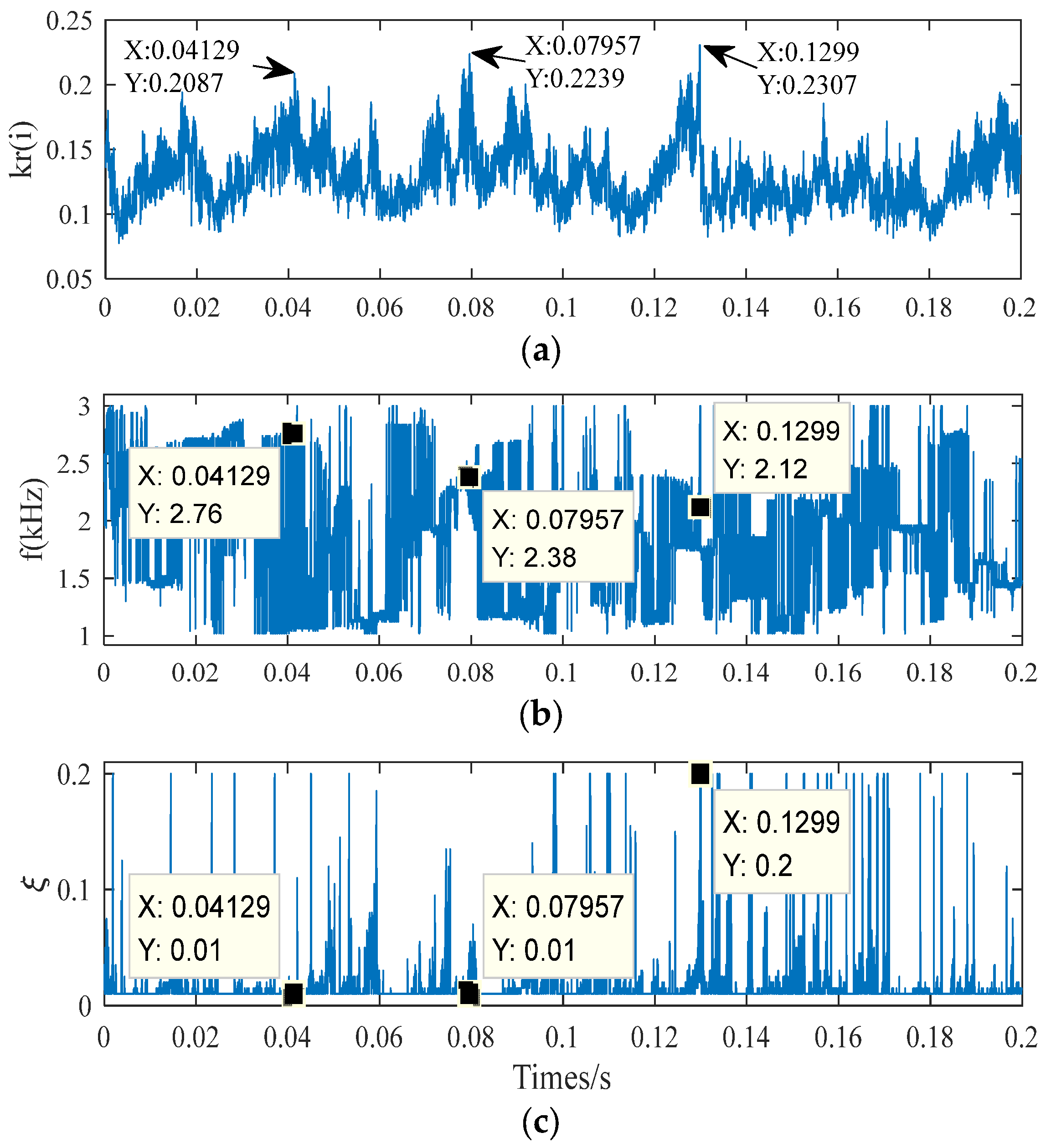
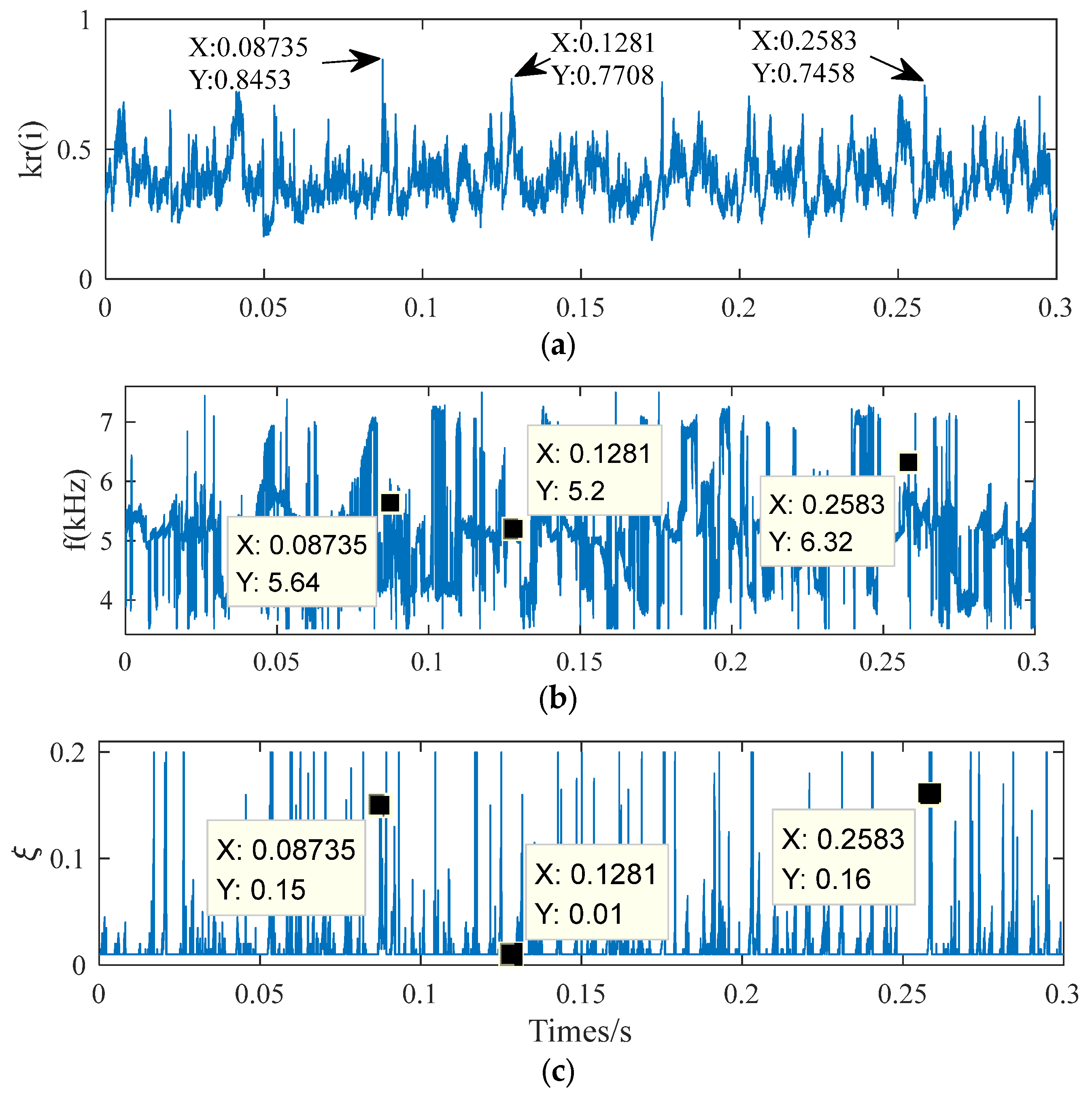
- The peak frequency of the component frequency band is taken as the value of the resonance frequency parameter f of dictionary D. At the same time, the appropriate value in the range of damping ratio is selected, which needs to ensure that the basis function decays to zero over its own length.
- (4)
- According to the selected signal characteristic morphological parameters , it is brought into the basis function formula (4) and expanded according to the different time shift parameters u, and then the dictionary D is constructed. The value of u is .
- (5)
- The signal and dictionary D are substituted into the FSS algorithm to calculate the sparse coefficient s. The sparse coefficient s and dictionary D are combined for sparse reconstruction to achieve signal reconstruction and noise reduction.
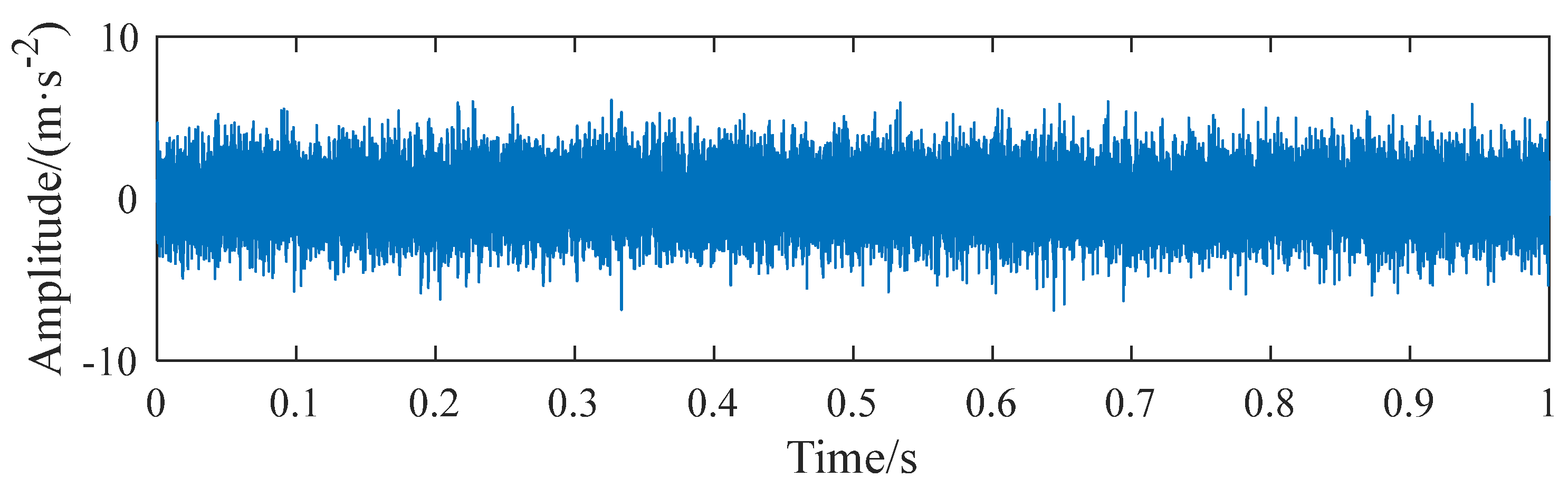
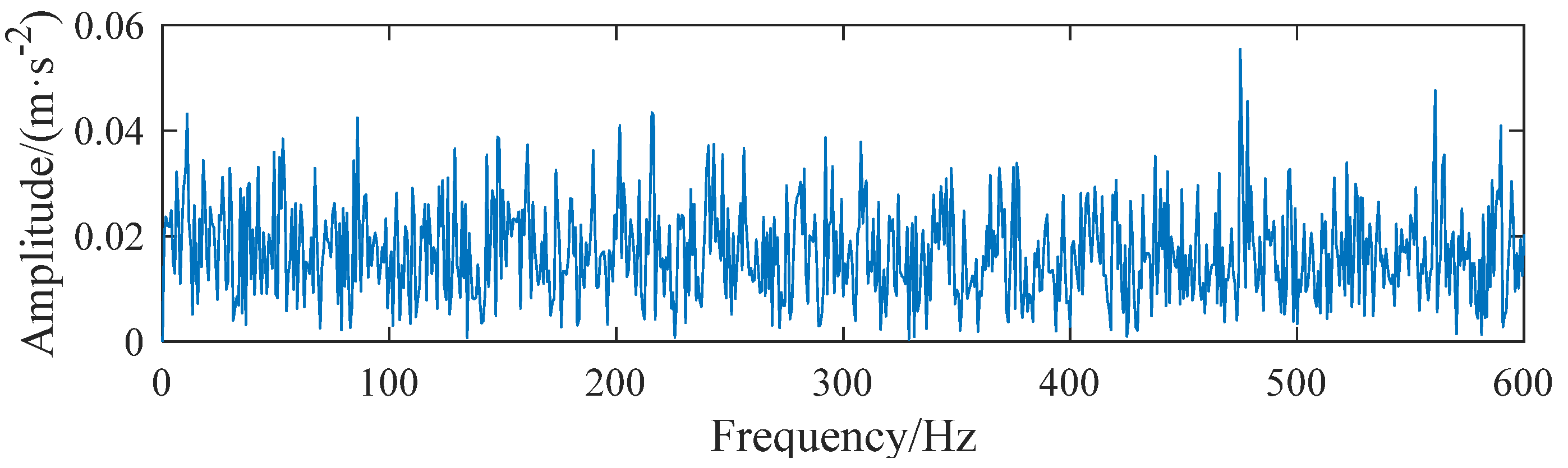
5. Simulation and Experimental Verification
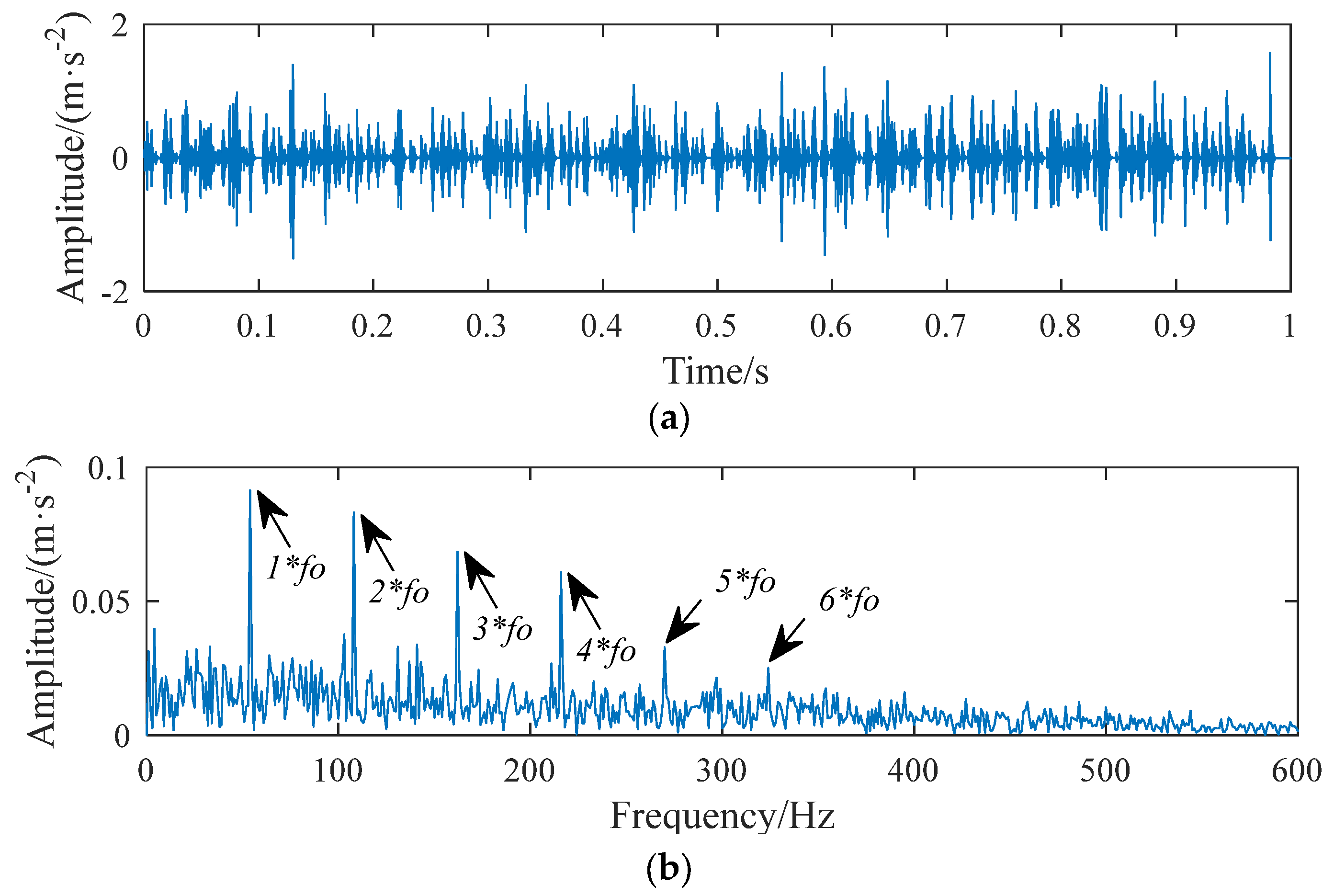
5.1. Simulation Verification
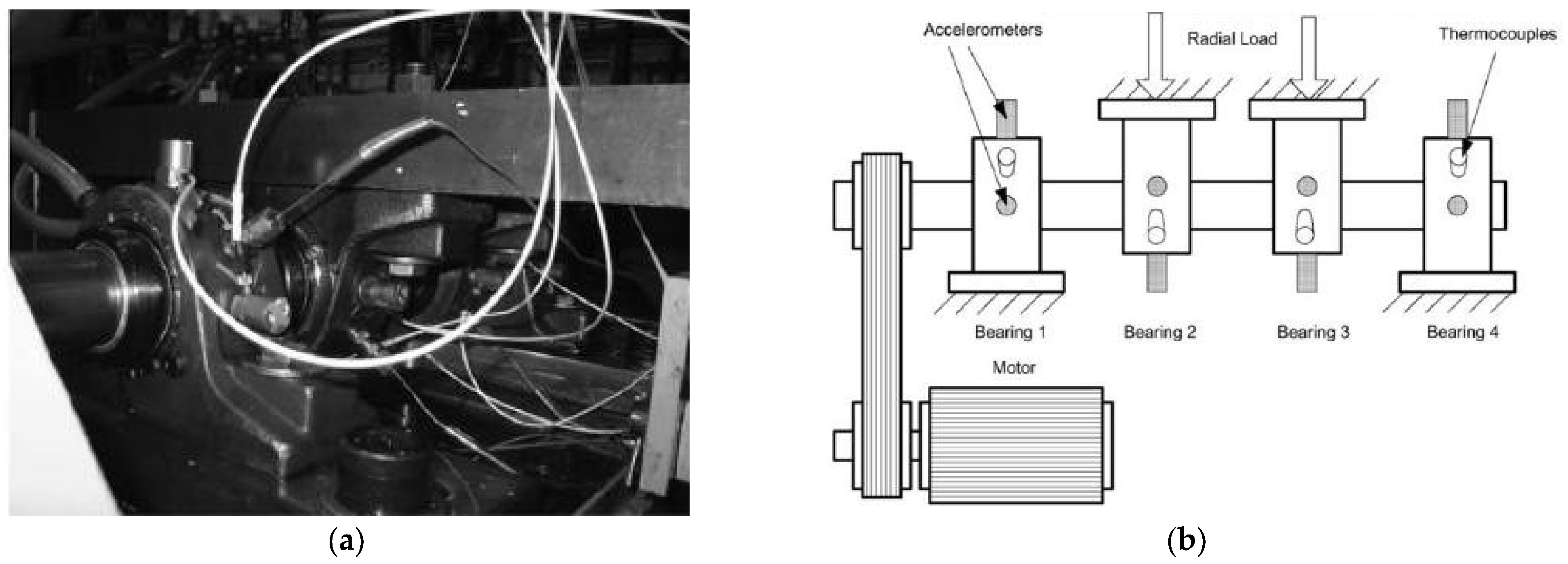
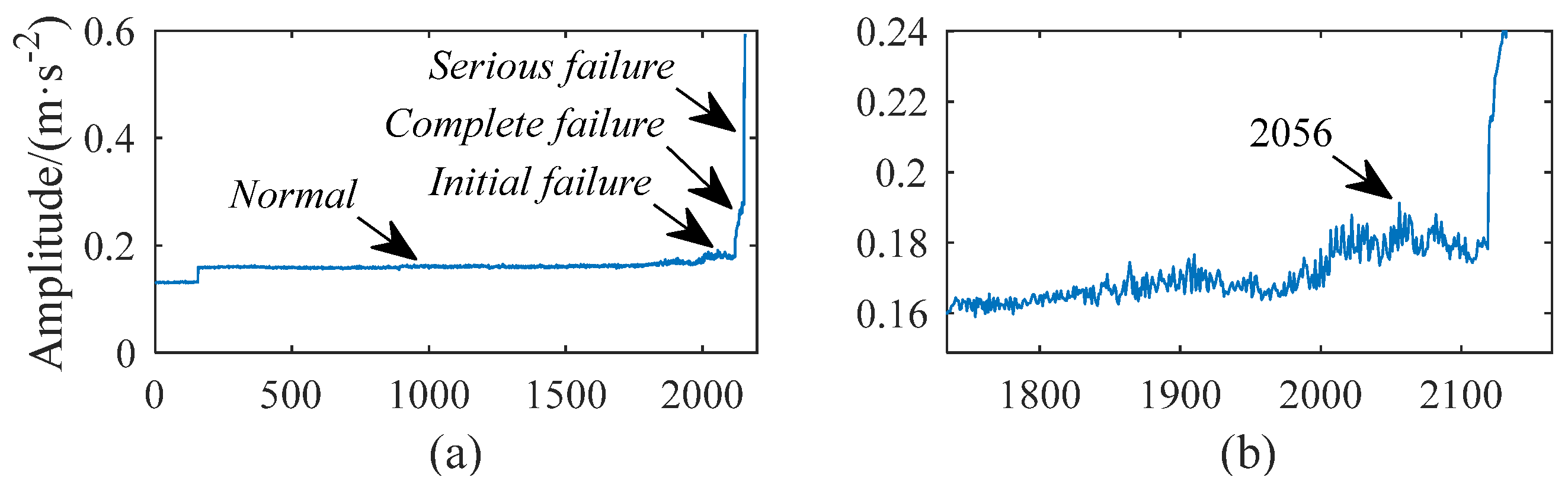
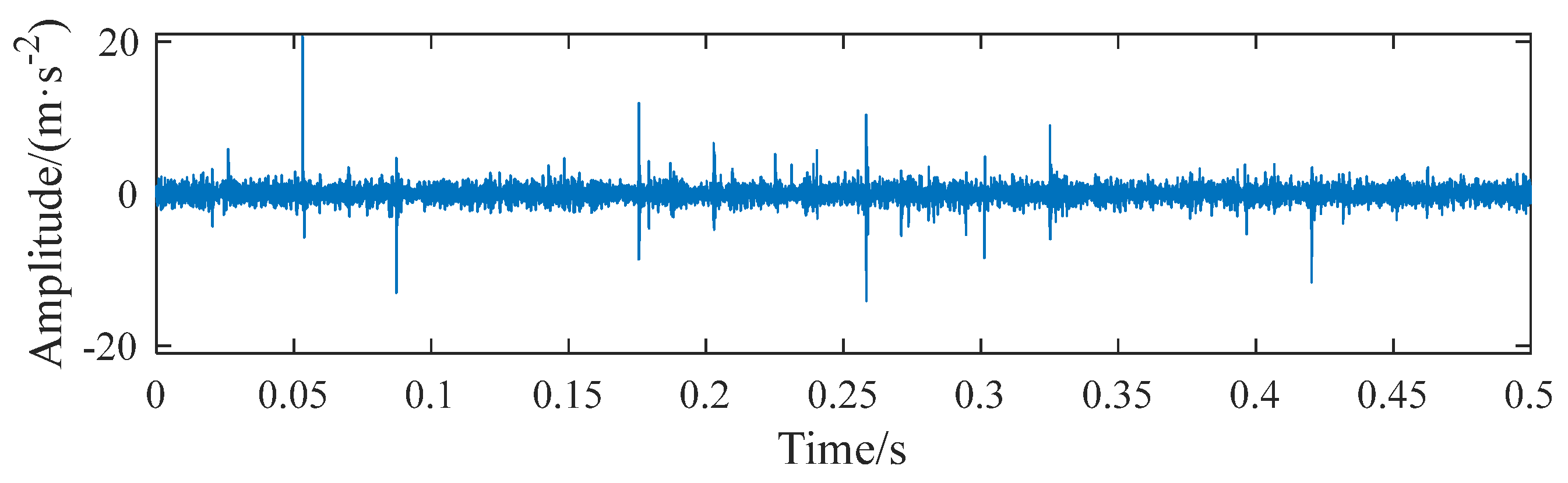
5.2. Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, J.; Pan, J.; Li, Z.; Zi, Y.; Chen, X. Generator bearing fault diagnosis for wind turbine via empirical wavelet transform using measured vibration signals. Renew. Energy 2016, 89, 80–92. [Google Scholar] [CrossRef]
- Olshausen, B.A.; Field, D.J. Emergence of simple-cell receptive field properties by learning a sparse code for natural images. Nature 1996, 381, 607–609. [Google Scholar] [CrossRef] [PubMed]
- Abrol, V.; Sharma, P.; Sao, A.K. Greedy double sparse dictionary learning for sparse representation of speech signals. Speech Commun. 2016, 85, 71–82. [Google Scholar] [CrossRef]
- Lin, N.; Sun, H.; Zhang, X.P. Overlapping Animal Sound Classification Using Sparse Representation. In Proceedings of the ICASSP 2018—2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018. [Google Scholar]
- Mairal, J.; Elad, M.; Sapiro, G. Sparse Representation for Color Image Restoration. IEEE Trans. Image Process. 2007, 17, 53–69. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, Z.; Yin, H.; Chai, Y.; Li, Y.; Qi, G. A novel multi-modality image fusion method based on image decomposition and sparse representation. Inf. Sci. 2018, 432, 516–529. [Google Scholar] [CrossRef]
- Feng, Z.; Zhou, Y.; Zuo, M.J.; Chu, F.; Chen, X. Atomic decomposition and sparse representation for complex signal analysis in machinery fault diagnosis: A review with examples. Measurement 2017, 103, 106–132. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, B.; Zhou, N. A novel image compression–encryption hybrid algorithm based on the analysis sparse representation. Optics Commun. 2017, 392, 223–233. [Google Scholar] [CrossRef]
- Du, Z.; Chen, X.; Zhang, H.; Yan, R. Sparse Feature Identification Based on Union of Redundant Dictionary for Wind Turbine Gearbox Fault Diagnosis. IEEE Trans. Ind. Electron. 2015, 62, 6594–6605. [Google Scholar] [CrossRef]
- Wang, H.; Du, W. Fast Spectral Correlation Based on Sparse Representation Self-Learning Dictionary and Its Application in Fault Diagnosis of Rotating Machinery. Complexity 2020, 2020, 9857839. [Google Scholar] [CrossRef]
- Kong, Y.; Wang, T.Y.; Feng, Z.P.; Chu, F.L. Discriminative dictionary learning based sparse representation classification for intelligent fault identification of planet bearings in wind turbine. Renew. Energy 2020, 152, 754–769. [Google Scholar] [CrossRef]
- Li, J.M.; Wang, H.; Wang, X.D.; Zhang, Y.G. Rolling bearing fault diagnosis based on improved adaptive parameterless empirical wavelet transform and sparse denoising. Measurement 2020, 152, 14. [Google Scholar] [CrossRef]
- He, G.; Ding, K.; Lin, H. Fault feature extraction of rolling element bearings using sparse representation. J. Sound Vib. 2016, 366, 514–527. [Google Scholar] [CrossRef]
- Tang, H.; Chen, J.; Dong, G. Sparse representation based latent components analysis for machinery weak fault detection. Mech. Syst. Signal Process. 2014, 46, 373–388. [Google Scholar] [CrossRef]
- Zhou, H.X.; Li, H.; Liu, T.; Chen, Q. A weak fault feature extraction of rolling element bearing based on attenuated cosine dictionaries and sparse feature sign search. ISA Trans. 2020, 97, 143–154. [Google Scholar] [CrossRef]
- Gilles, J. Empirical Wavelet Transform. Signal Process. IEEE Trans. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Chegini, S.N.; Bagheri, A.; Najafi, F. Application of a new EWT-based denoising technique in bearing fault diagnosis. Measurement 2019, 144, 275–297. [Google Scholar] [CrossRef]
- Song, Y.; Zeng, S.; Ma, J.; Guo, J. A Fault Diagnosis Method for Roller Bearing Based on Empirical Wavelet Transform Decomposition with Adaptive Empirical Mode Segmentation. Measurement 2017, 117, 266–276. [Google Scholar] [CrossRef]
- Cao, H.; Fan, F.; Zhou, K.; He, Z. Wheel-bearing fault diagnosis of trains using empirical wavelet transform. Measurement 2016, 82, 439–449. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhu, H.; Li, Z. A new compound faults detection method for rolling bearings based on empirical wavelet transform and chaotic oscillator. Chaos Solitons Fractals 2016, 89, 8–19. [Google Scholar] [CrossRef]
- Wang, S.; Huang, W.; Zhu, Z.K. Transient modeling and parameter identification based on wavelet and correlation filtering for rotating machine fault diagnosis. Mech. Syst. Signal Process. 2011, 25, 1299–1320. [Google Scholar] [CrossRef]
- Gilles, J.M.; Heal, K. A parameterless scale-space approach to find meaningful modes in histograms—Application to image and spectrum segmentation. Int. J. Wavelets Multiresolut. Inf. Process. 2014, 12, 1450044. [Google Scholar] [CrossRef]
- Mcfadden, P.D.; Smith, J.D. Model for the vibration produced by a single point defect in a rolling element bearing. J. Sound Vib. 1984, 96, 69–82. [Google Scholar] [CrossRef]
- Mcfadden, P.D.; Smith, J.D. The vibration produced by multiple point defects in a rolling element bearing. J. Sound Vib. 1985, 98, 263–273. [Google Scholar] [CrossRef]
- Qiu, H.; Lee, J.; Lin, J.; Yu, G. Robust performance degradation assessment methods for enhanced rolling element bearing prognostics. Adv. Eng. Inform. 2003, 17, 127–140. [Google Scholar] [CrossRef]
- Lei, Y.; Jing, L.; He, Z.; Zi, Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1738–1749. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Rollers | Diameter of Roller | Pitch Diameter | Contact Angle | Sampling Frequency |
|---|---|---|---|---|
| 16 | 8.407 mm | 71.501 mm | 15.17° | 20 KZ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Zheng, S.; Wu, X.; Liu, T. Feature Extraction of Bearing Weak Fault Based on Sparse Coding Theory and Adaptive EWT. Appl. Sci. 2022, 12, 10807. https://doi.org/10.3390/app122110807
Chen Q, Zheng S, Wu X, Liu T. Feature Extraction of Bearing Weak Fault Based on Sparse Coding Theory and Adaptive EWT. Applied Sciences. 2022; 12(21):10807. https://doi.org/10.3390/app122110807
Chicago/Turabian StyleChen, Qing, Sheng Zheng, Xing Wu, and Tao Liu. 2022. "Feature Extraction of Bearing Weak Fault Based on Sparse Coding Theory and Adaptive EWT" Applied Sciences 12, no. 21: 10807. https://doi.org/10.3390/app122110807