


Simplified Double-Integral Sliding-Mode Control of PWM DC-AC Converter with Constant Switching Frequency


Abstract
:Featured Application
Abstract
1. Introduction
2. Simplified DI-SMC Design of DC-AC Buck Converter
2.1. Control-Oriented Model
2.2. Equivalent Control Law
2.3. Existence and Stability Conditions
3. Design of Analog Control Circuit
- Output voltage sensor: The feedback network gain, , is set to 5/14, and = RB/(RA + RB), where RA and RB are the resistors of the output voltage sensor. If the value of RA is assumed to be 9.1 kΩ, then RB is 5.1 kΩ.
- Summing amplifier: The resistors RS1, RS2, and RS3 for the summing op-amp can be set to 5.1 kΩ.
- PWM generator: Since the input voltage, VI, is 28 V, the ramp voltage of the pulse-width modulator VT = VI = 10 V, and the switching frequency fs is set to 1 MHz.
- Scaling factor: If a scaling factor, γ, is required to scale down VT to 4 V, then γ can be set to 0.4 = RI1/RI2. Hence, if RI2 is chosen as 5.1 kΩ, then RI1 is 2 kΩ.
- Proportional gain Kp: According to [33], the proportional gain is defined as Kp = R2/R1. Thus, if the value of Kp is 27.6 and R1 is selected as 33 kΩ, then R2 becomes 910 kΩ.
- Integral gain Ki: In [33], the integral gain is defined as Ki = 1/(R1 C). If the value of Ki is set to 13.8 × 104 and R1 is 33 kΩ, then C can be chosen as 220 pF.
4. Results and Discussion
4.1. Steady-State Performance
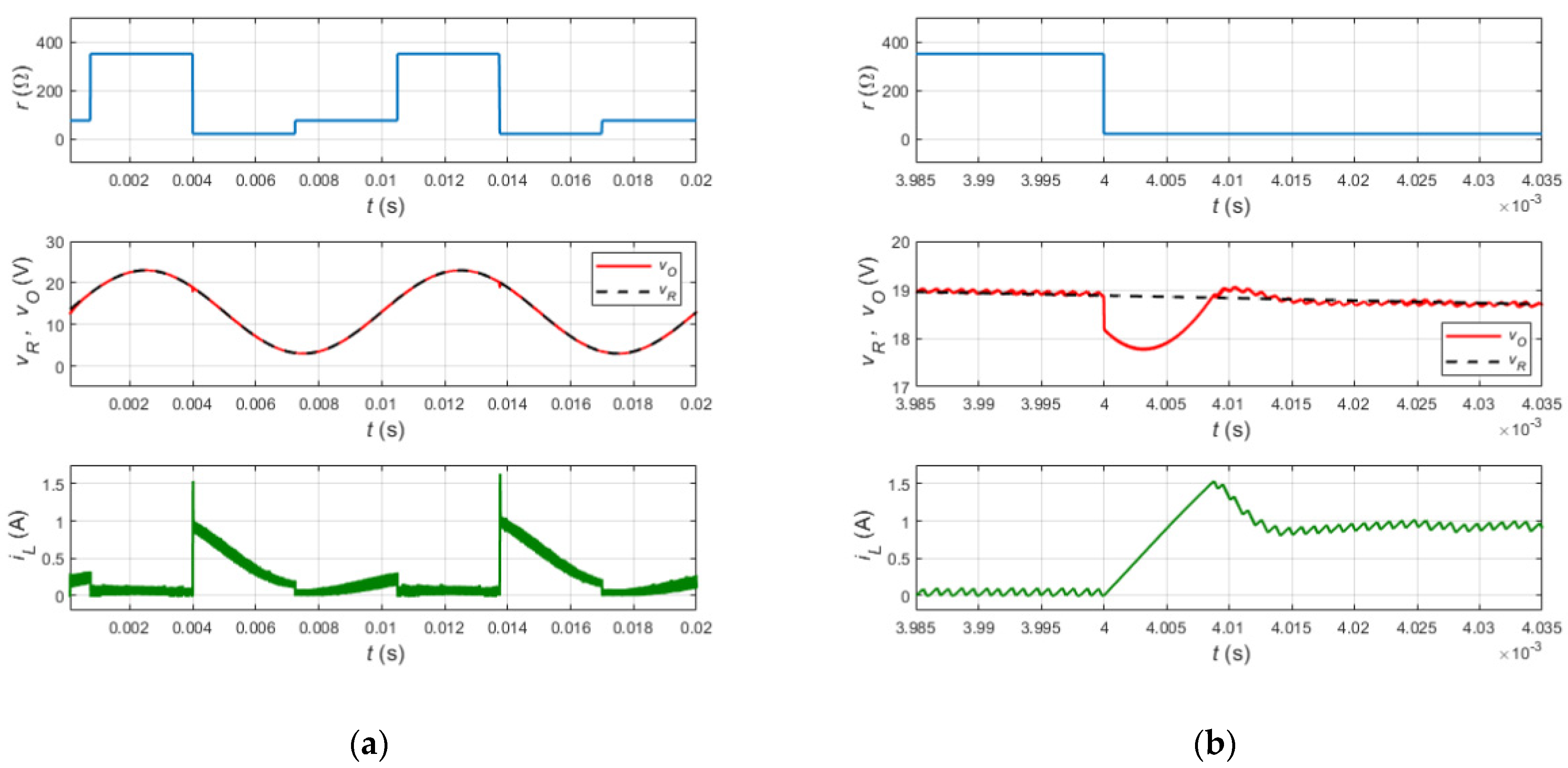
4.2. Tracking Performance under Large-Load Disturbance
4.3. Comparison with Conventional DI-SMC Scheme
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chincholkar, S.H.; Jiang, W.; Chan, C.Y. A normalized output error-based sliding-mode controller for the DC-DC cascade boost converter. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 92–96. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electromechanical Systems, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Tan, S.C.; Lai, Y.M.; Tse, C.K. Sliding Mode Control of Switching Power Converters; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Al-Baidhani, H.; Salvatierra, T.; Ordonez, R.; Kazimierczuk, M.K. Simplified nonlinear voltage-mode control of PWM DC-DC buck converter. IEEE Trans. Energy Convers. 2021, 36, 431–440. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Chan, C. Design of fixed-frequency pulse width-modulation-based sliding-mode controllers for the quadratic boost converter. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 51–55. [Google Scholar] [CrossRef]
- Mishra, D.; Singh, B.; Panigrahi, B.K. Adaptive current control for a bi-directional interleaved EV charger with disturbance rejection. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Jeung, Y.; Lee, D. Voltage and current regulations of bidirectional isolated dual-active-bridge DC-DC converters based on a double-integral sliding mode control. IEEE Trans. Power Electron. 2019, 34, 6937–6946. [Google Scholar] [CrossRef]
- Qureshi, M.A.; Ahmad, I.; Munir, M.F. Double integral sliding mode control of continuous gain four quadrant quasi-z-source converter. IEEE Access 2018, 6, 77785–77795. [Google Scholar] [CrossRef]
- Pradhan, R.; Subudhi, B. Double integral sliding mode MPPT control of a photovoltaic system. IEEE Trans. Control Syst. Technol. 2016, 24, 285–292. [Google Scholar] [CrossRef]
- Ghosh, S.K.; Roy, T.K.; Pramanik, M.A.H.; Mahmud, M.A. Design of nonlinear backstepping double-integral sliding mode controllers to stabilize the DC-bus voltage for DC–DC converters feeding CPLs. Energies 2021, 14, 6753. [Google Scholar] [CrossRef]
- Tan, S.; Lai, Y.M.; Tse, C.K. Indirect sliding mode control of power converters via double integral sliding surface. IEEE Trans. Power Electron. 2008, 23, 600–611. [Google Scholar]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. An adaptive droop control scheme for DC microgrids integrating sliding mode voltage and current controlled boost converters. IEEE Trans. Smart Grid 2019, 10, 1685–1693. [Google Scholar] [CrossRef]
- Komurcugil, H.; Biricik, S.; Guler, N. Indirect sliding mode control for DC-DC SEPIC converters. IEEE Trans. Ind. Inform. 2020, 16, 4099–4108. [Google Scholar] [CrossRef]
- Mehmood Shah, F.; Xie, W.; Yan, W.L.; Li, R.; Minxiao, H.; Teshager Bitew, G. Input-parallel-output-series control strategy for three-level medium-voltage DC grid-type converter. J. Eng. 2019, 2019, 1656–1661. [Google Scholar] [CrossRef]
- Jazi, H.N.; Goudarzian, A.; Pourbagher, R.; Derakhshandeh, S.Y. PI and PWM sliding mode control of POESLL converter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2167–2177. [Google Scholar] [CrossRef]
- Chen, Z. PI and sliding mode control of a Cuk converter. IEEE Trans. Power Electron. 2012, 27, 3695–3703. [Google Scholar] [CrossRef]
- Feng, X.; Tao, Y.; Wan, M. Energy management and control strategy for multiport power supply system based on energy storage. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 5225–5230. [Google Scholar]
- Chincholkar, S.H.; Jiang, W.; Chan, C. A modified hysteresis-modulation-based sliding mode control for improved performance in hybrid DC-DC boost converter. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 1683–1687. [Google Scholar] [CrossRef]
- Mao, Y.; Yang, Y. A double-integral sliding mode-based hybrid control for a single-input-multiple-output buck converter. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 2, 247–256. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Hernandez-Guzman, V.M.; Antonio-Cruz, M.; Munoz-Carrillo, D. DC/DC buck power converter as a smooth starter for a DC motor based on a hierarchical control. IEEE Trans. Power Electron. 2015, 30, 1076–1084. [Google Scholar] [CrossRef]
- Salimi, M.; Soltani, J.; Zakipour, A.; Abjadi, N.R. Hyper-plane sliding mode control of the DC-DC buck/boost converter in continuous and discontinuous conduction modes of operation. IET Power Electron. 2015, 8, 1473–1482. [Google Scholar] [CrossRef]
- Al Zawaideh, A.; Boiko, I.M. Analysis of stability and performance of a cascaded PI sliding-mode control DC–DC boost converter via LPRS. IEEE Trans. Power Electron. 2022, 37, 10455–10465. [Google Scholar] [CrossRef]
- González, I.; Sánchez-Squella, A.; Langarica-Cordoba, D.; Yanine-Misleh, F.; Ramirez, V. A PI + sliding-mode controller based on the discontinuous conduction mode for a unidirectional buck–boost converter with electric vehicle applications. Energies 2021, 14, 6785. [Google Scholar] [CrossRef]
- Vidal-Idiarte, E.; Carrejo, C.E.; Calvente, J.; Martínez-Salamero, L. Two-loop digital sliding mode control of DC-DC power converters based on predictive interpolation. IEEE Trans. Ind. Electron. 2011, 58, 2491–2501. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Farsizadeh, H.; Khooban, M.H. A novel nonlinear deep reinforcement learning controller for DC-DC power buck converters. IEEE Trans. Ind. Electron. 2021, 68, 6849–6858. [Google Scholar] [CrossRef]
- Liu, J.; Yin, Y.; Luo, W.; Vazquez, S.; Franquelo, L.G.; Wu, L. Sliding mode control of a three-phase AC/DC voltage source converter under unknown load conditions: Industry applications. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1771–1780. [Google Scholar] [CrossRef]
- Thirumeni, M.; Thangavelusamy, D. Design and analysis of hybrid PSO-GSA tuned PI and SMC controller for DC-DC Cuk converter. IET Circuits Devices Syst. 2019, 13, 374–384. [Google Scholar] [CrossRef]
- Mukkapati, A.B.K.; Krishnasamy, V.; Kaur, R. Genetic algorithm assisted fixed frequency sliding mode controller for quadratic boost converter in fuel cell vehicle. IET Electr. Syst. Transp. 2020, 10, 81–88. [Google Scholar] [CrossRef]
- Wang, J.; Luo, W.; Liu, J.; Wu, L. Adaptive type-2 FNN-based dynamic sliding mode control of DC–DC boost converters. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2246–2257. [Google Scholar] [CrossRef]
- Yasin, A.R.; Ashraf, M.; Bhatti, A.I. Fixed frequency sliding mode control of power converters for improved dynamic response in DC micro-grids. Energies 2018, 11, 2799. [Google Scholar] [CrossRef] [Green Version]
- Al-Baidhani, H. Design and Implementation of Simplified Sliding-Mode Control of PWM DC-DC Converters for CCM. Ph.D. Thesis, Wright State University, Dayton, OH, USA, 2020. [Google Scholar]
- Al-Baidhani, H.; Kazimierczuk, M.K.; Salvatierra, T.; Reatti, A.; Corti, F. Sliding-mode voltage control of dynamic power supply for CCM. In Proceedings of the 2019 IEEE International Symposium on Circuits and Systems (ISCAS), Sapporo, Japan, 26–29 May 2019; pp. 1–5. [Google Scholar]
- Kazimierczuk, M.K. Pulse-Width Modulated DC-DC Power Converters, 2nd ed.; John Wiley & Sons: Chichester, UK, 2016. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Value |
|---|---|---|
| Inductor | L | 56 μH |
| Output capacitor | CO | 2.2 μF |
| Nominal load resistance | R | 75.00 Ω |
| Inductor ESR | rL | 0.190 Ω |
| Output capacitor ESR | rC | 0.800 Ω |
| MOSFET on-resistance | rDS | 4.000 Ω |
| Diode forward resistance | rF | 1.300 Ω |
| Diode threshold voltage | VF | 0.875 V |
| Input voltage | VI | 28 V |
| Output voltage | vO | (3–23) V |
| Switching frequency | fs | 1 MHz |
| DI-SMC Method | Required Sensors | Switching Frequency | Percentage Undershoot | Settling Time | Steady-State Error |
|---|---|---|---|---|---|
| Conventional | vO and iC | Variable | 5.1% | 100 μs | 1.5% |
| Simplified | vO | Constant | 5.8% | 15 μs | 0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Baidhani, H.; Kazimierczuk, M.K. Simplified Double-Integral Sliding-Mode Control of PWM DC-AC Converter with Constant Switching Frequency. Appl. Sci. 2022, 12, 10312. https://doi.org/10.3390/app122010312
Al-Baidhani H, Kazimierczuk MK. Simplified Double-Integral Sliding-Mode Control of PWM DC-AC Converter with Constant Switching Frequency. Applied Sciences. 2022; 12(20):10312. https://doi.org/10.3390/app122010312
Chicago/Turabian StyleAl-Baidhani, Humam, and Marian K. Kazimierczuk. 2022. "Simplified Double-Integral Sliding-Mode Control of PWM DC-AC Converter with Constant Switching Frequency" Applied Sciences 12, no. 20: 10312. https://doi.org/10.3390/app122010312