

Balance Control of a Configurable Inverted Pendulum on an Omni-Directional Wheeled Mobile Robot

Abstract
:1. Introduction
2. Mathematical Modeling
2.1. Model of an Omni-Directional Wheeled Mobile Robot
2.2. Model of a Rotary Inverted Pendulum
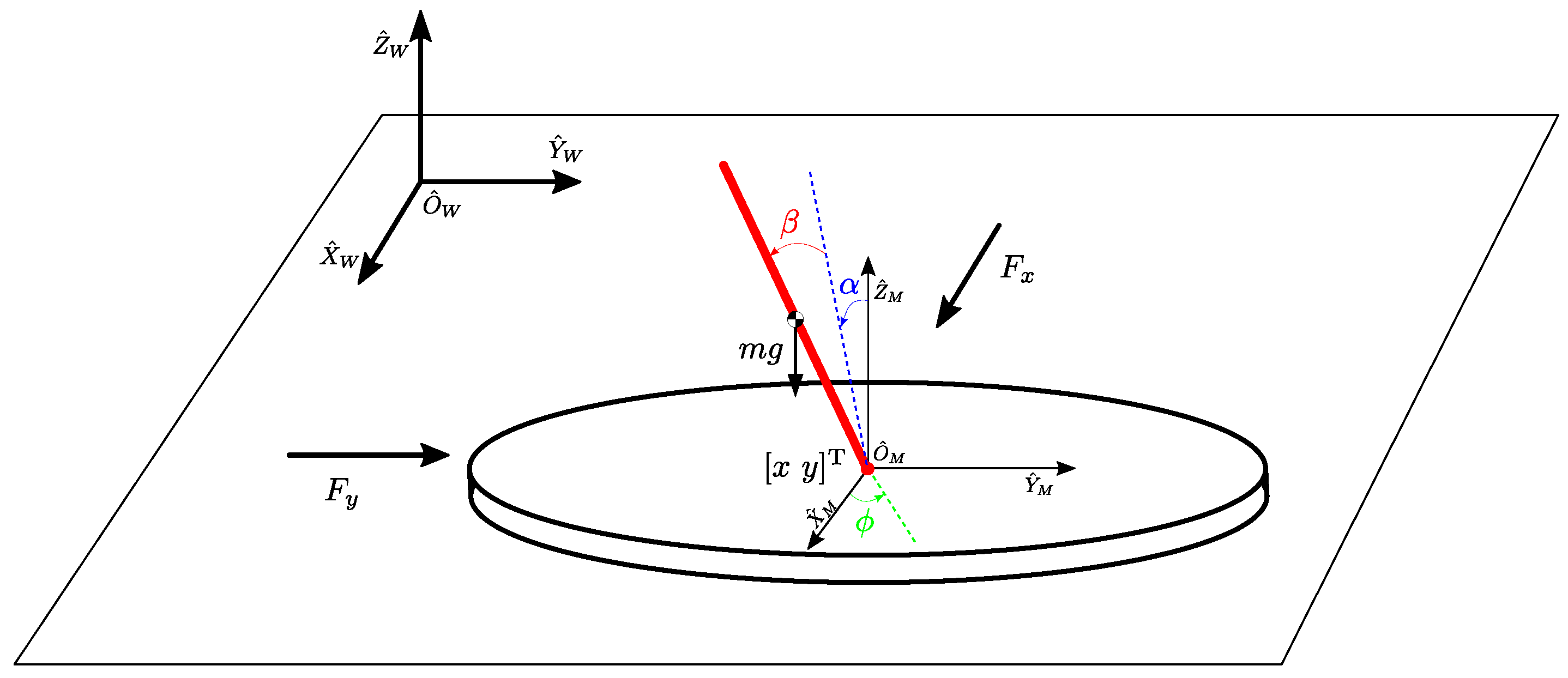
2.3. Model of a Spherical Inverted Pendulum
2.4. Relationship between Control Forces, Control Torque, and Control Voltages
3. Using Second-Order Sliding Mode Control to Design the Stabilizing Controllers
3.1. Controller Design for a Rotary Inverted Pendulum
Stability Analysis of Zero Dynamics
3.2. Controller Design of Spherical Inverted Pendulum
4. Explanation of the Experimental Device
5. Simulation and Experimental Results
5.1. Simulation Results of Rotary Inverted Pendulum
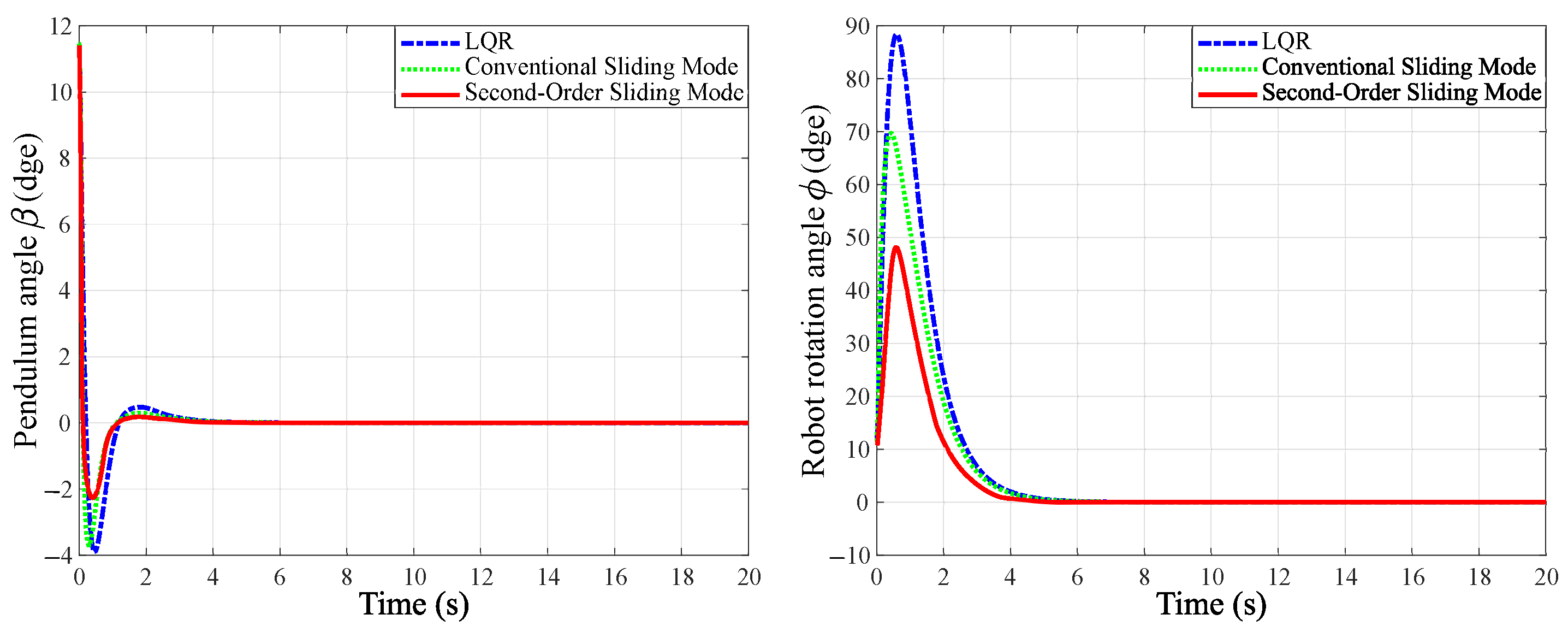
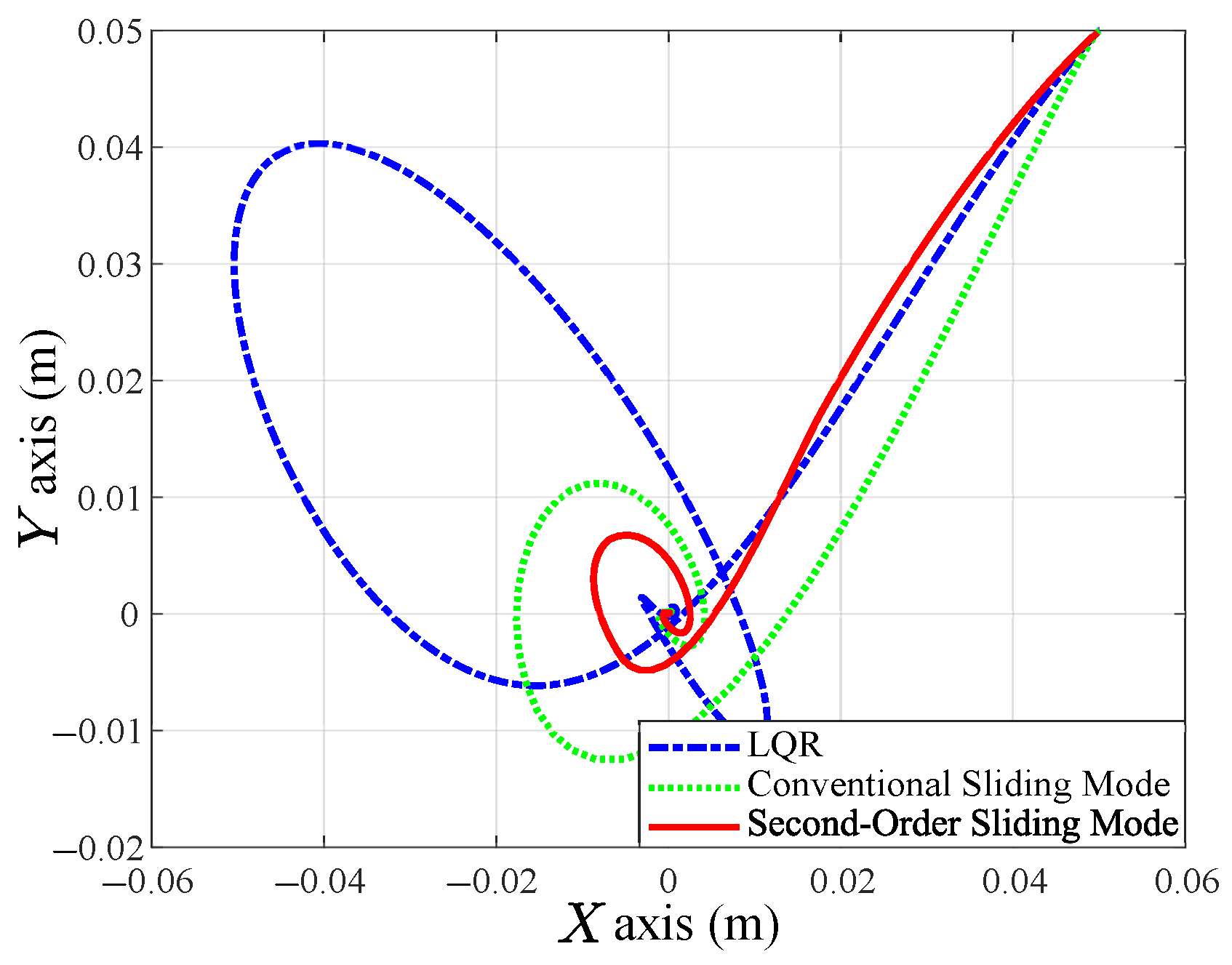
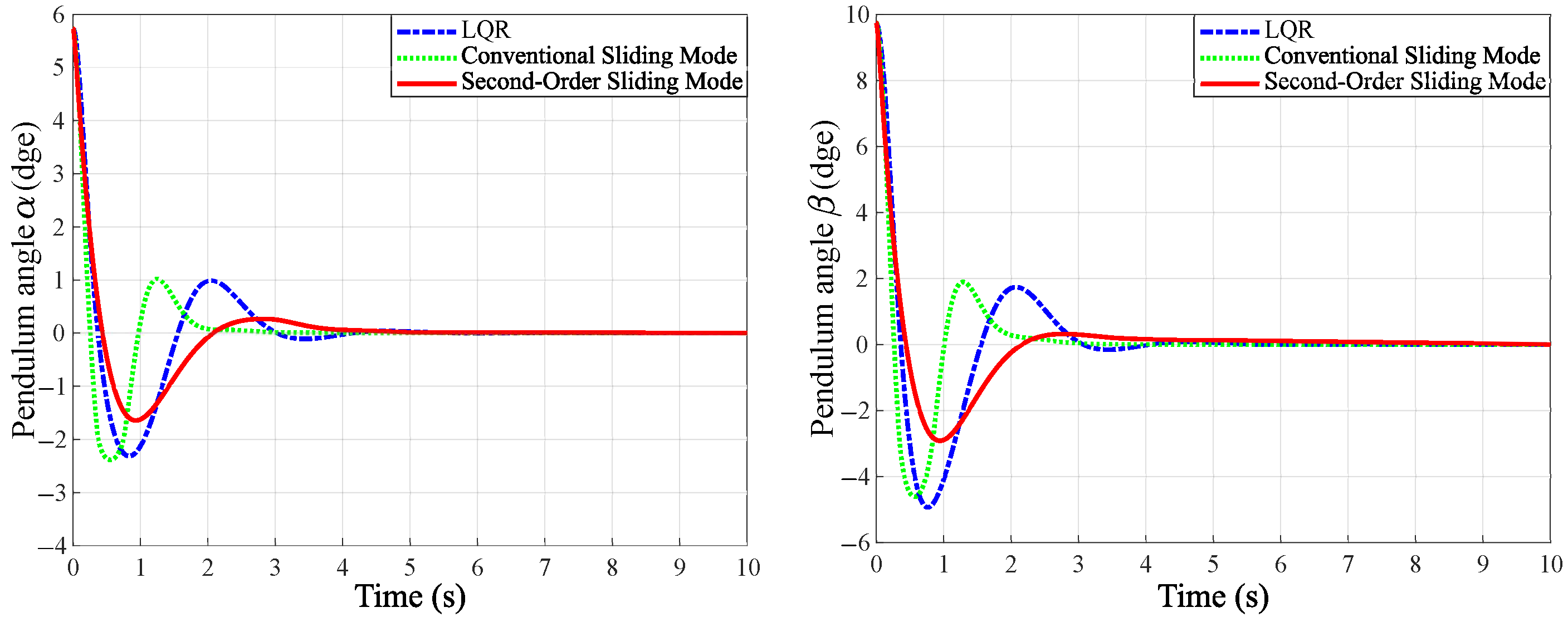
5.2. Simulation Results of Spherical Inverted Pendulum
5.3. Experimental Results of Rotary Inverted Pendulum
5.4. Experimental Results of Spherical Inverted Pendulum
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kajita, S.; Benallegue, M.; Cisneros, R.; Sakaguchi, T.; Nakaoka, S.; Morisawa, M.; Kaneko, K.; Kanehiro, F. Biped walking pattern generation based on spatially quantized dynamics. In Proceedings of the 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Birmingham, UK, 15–17 November 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Babazadeh, R.; Khiabani, A.G.; Azmi, H. Optimal control of Segway personal transporter. In Proceedings of the 2016 4th International Conference on Control, Instrumentation, and Automation (ICCIA), Qazvin, Iran, 27–28 January 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Han, S.I.; Lee, J.M. Balancing and Velocity Control of a Unicycle Robot Based on the Dynamic Model. IEEE Trans. Ind. Electron. 2015, 62, 405–413. [Google Scholar] [CrossRef]
- Bakarac, P.; Kaluz, M.; Cirka, L. Design and development of a low-cost inverted pendulum for control education. In Proceedings of the 2017 21st International Conference on Process Control (PC), Strbske Pleso, Slovakia, 6–9 June 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Horibe, T.; Sakamoto, N. Swing up and stabilization of the Acrobot via nonlinear optimal control based on stable manifold method. IFAC-PapersOnLine 2016, 49, 374–379. [Google Scholar] [CrossRef]
- Vardulakis, A.; Wei, C. Balance Control of the Pendubot via the Polynomial Matrix Approach. In Proceedings of the 2018 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Ahsan, M.; Khalid, M.U.; Kamal, O. Stabilization of an Inertia Wheel inverted Pendulum using Model based Predictive Control. In Proceedings of the 2017 14th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 10–14 January 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Ramos, J.; Kim, S. Dynamic Bilateral Teleoperation of the Cart-Pole: A Study Toward the Synchronization of Human Operator and Legged Robot. IEEE Robot. Autom. Lett. 2018, 3, 3293–3299. [Google Scholar] [CrossRef]
- Khatoon, S.; Chaturvedi, D.K.; Hasan, N.; Istiyaque, M. Optimal control of a double inverted pendulum by linearization technique. In Proceedings of the 2017 International Conference on Multimedia, Signal Processing and Communication Technologies (IMPACT), Aligarh, India, 24–26 November 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Yaren, T.; Kizir, S. Stabilization Control of Triple Pendulum on a Cart. In Proceedings of the 2018 6th International Conference on Control Engineering and Information Technology (CEIT), Istanbul, Turkey, 25–27 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Kao, S.T.; Ho, M.T. Tracking control of a spherical inverted pendulum with an omnidirectional mobile robot. In Proceedings of the 2017 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 6–8 September 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Krafes, S.; Chalh, Z.; Saka, A. Vision-based control of a flying spherical inverted pendulum. In Proceedings of the 2018 4th International Conference on Optimization and Applications (ICOA), Mohammedia, Morocco, 26–27 April 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Morishita, M.; Maeyama, S.; Nogami, Y.; Watanabe, K. Development of an Omnidirectional Cooperative Transportation System Using Two Mobile Robots with Two Independently Driven Wheels. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Mamun, M.A.A.; Nasir, M.T.; Khayyat, A. Embedded System for Motion Control of an Omnidirectional Mobile Robot. IEEE Access 2018, 6, 6722–6739. [Google Scholar] [CrossRef]
- Kao, S.T.; Chiou, W.J.; Ho, M.T. Balancing of a spherical inverted pendulum with an omni-directional mobile robot. In Proceedings of the 2013 IEEE International Conference on Control Applications (CCA), Hyderabad, India, 28–30 August 2013; pp. 760–765. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar] [CrossRef] [Green Version]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Bartolini, G.; Pisano, A.; Punta, E.; Usai, E. A survey of applications of second-order sliding mode control to mechanical systems. Int. J. Control 2003, 76, 875–892. [Google Scholar] [CrossRef]
- Kaplan, O.; Bodur, F. Second-order sliding mode controller design of buck converter with constant power load. Int. J. Control 2022, 1–17. [Google Scholar] [CrossRef]
- González-Hernández, I.; Salazar, S.; Lozano, R.; Ramírez-Ayala, O. Real-Time Improvement of a Trajectory-Tracking Control Based on Super-Twisting Algorithm for a Quadrotor Aircraft. Drones 2022, 6, 36. [Google Scholar] [CrossRef]
- Kao, S.T.; Ho, M.T. Second-Order Sliding Mode Control for Ball-Balancing System. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; IEEE: Copenhagen, Denmark, 2018; pp. 1730–1735. [Google Scholar] [CrossRef]
- Shavalipou, A.; Ha, S.M.; Nopia, Z.M. Symbolic Parametric LQR Controller Design for an Active Vehicle Suspension System. J. Appl. Sci. 2015, 15, 1127–1132. [Google Scholar] [CrossRef] [Green Version]
- Ginsberg, J.H. Advanced Engineering Dynamics; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in ElectroMechanical Systems; CRC Press: Baca Raton, FL, USA, 1999. [Google Scholar] [CrossRef]
- Levant, A. Robust exact differentiation via sliding mode technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Pérez-Ventura, U.; Fridman, L. Design of super-twisting control gains: A describing function based methodology. Automatica 2019, 99, 175–180. [Google Scholar] [CrossRef]
- Narendra, K.S. Frequency Domain Criteria for Absolute Stability; Academic Press: Cambridge, MA, USA, 1973. [Google Scholar]
- Gantmacher, F.R. Matrix Theory Vol. 1; American Mathematical Society: Providence, RI, USA, 1990. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Fantoni, I.; Lozano, R. The Cart-Pole System; Springer: London, UK, 2002. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Maximum Deviation of the Pendulum’s Angle | Maximum Deviation of the Robot’s Rotation Angle | Maximum Deviation of the Robot’s Positions | |
|---|---|---|---|---|
| LQR | 0.050 m | 0.040 m | ||
| Conventional SM | 0.018 m | 0.011 m | ||
| Second-order SM | 0.007 m | 0.007 m | ||
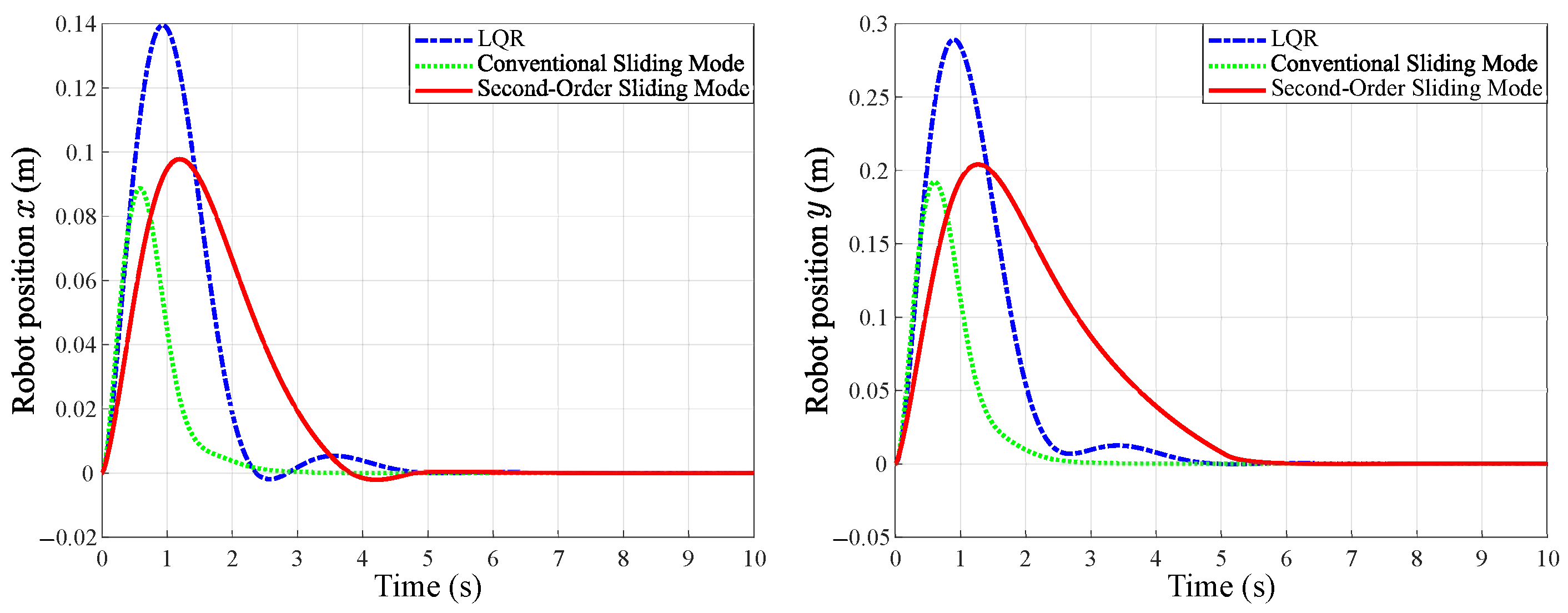
| Controller | Maximum Deviation of the Pendulum’s Angles | Maximum Deviation of the Robot’s Rotation Angle | Maximum Deviation of the Robot’s Positions | ||
|---|---|---|---|---|---|
| LQR | 0.14 m | 0.29 m | |||
| Conventional SM | 0.09 m | 0.19 m | |||
| Second-order SM | 0.10 m | 0.20 m | |||
| Controller | Steady-State Oscillating Range of the Pendulum’s Angle | Steady-State Oscillating Range of Robot’s Rotation Angle | Maximum Deviation of the Robot’s Positions | |
|---|---|---|---|---|
| LQR | to | 0.020 m | 0.016 m | |
| Conventional SM | to | 0.008 m | 0.005 m | |
| Second-order SM | to | 0.007 m | 0.003 m | |
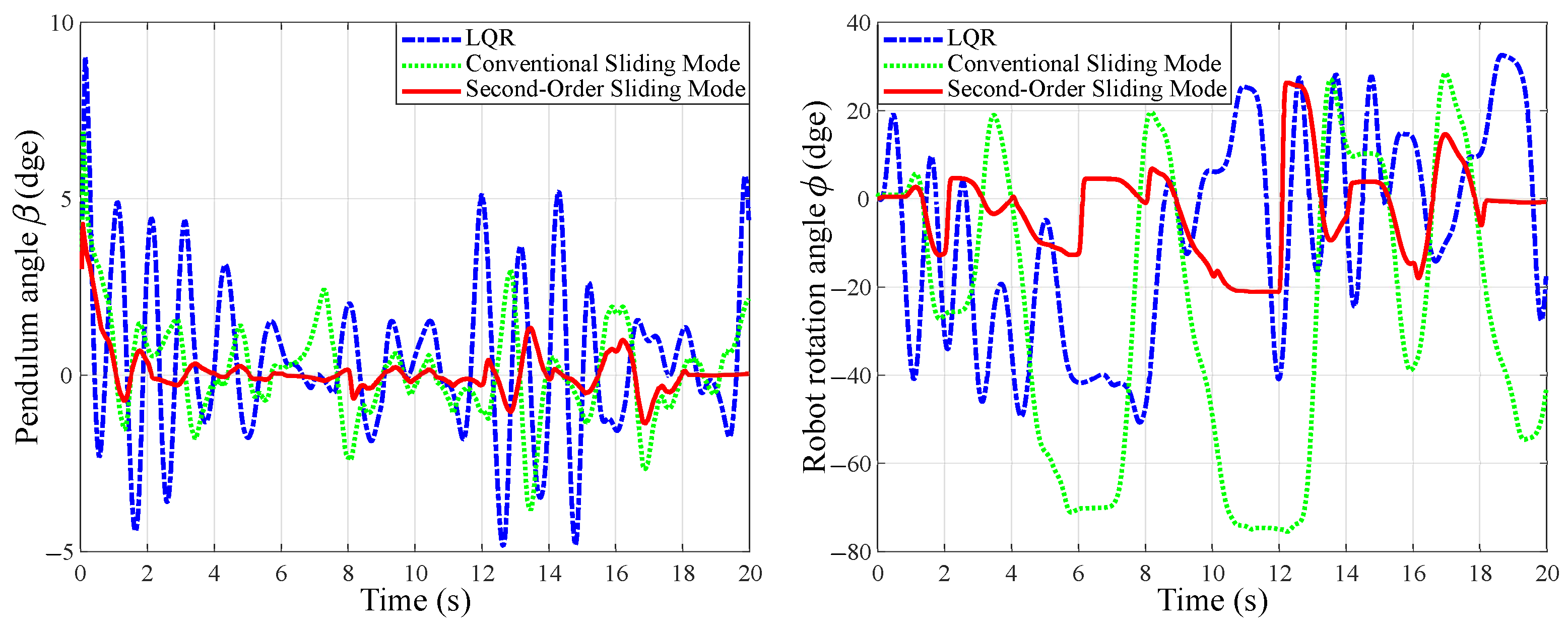
| Controller | Steady-State Oscillating Range of the Pendulum’s Angles | Steady-State Oscillating Range of Robot’s Rotation Angle | Maximum Deviation of the Robot’s Positions | ||
|---|---|---|---|---|---|
| LQR | 0.020 m | 0.019 m | |||
| Conventional SM | 0.015 m | 0.021 m | |||
| Second-order SM | 0.009 m | 0.013 m | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kao, S.-T.; Ho, M.-T. Balance Control of a Configurable Inverted Pendulum on an Omni-Directional Wheeled Mobile Robot. Appl. Sci. 2022, 12, 10307. https://doi.org/10.3390/app122010307
Kao S-T, Ho M-T. Balance Control of a Configurable Inverted Pendulum on an Omni-Directional Wheeled Mobile Robot. Applied Sciences. 2022; 12(20):10307. https://doi.org/10.3390/app122010307
Chicago/Turabian StyleKao, Sho-Tsung, and Ming-Tzu Ho. 2022. "Balance Control of a Configurable Inverted Pendulum on an Omni-Directional Wheeled Mobile Robot" Applied Sciences 12, no. 20: 10307. https://doi.org/10.3390/app122010307