
Smart Industrial Robot Control Trends, Challenges and Opportunities within Manufacturing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
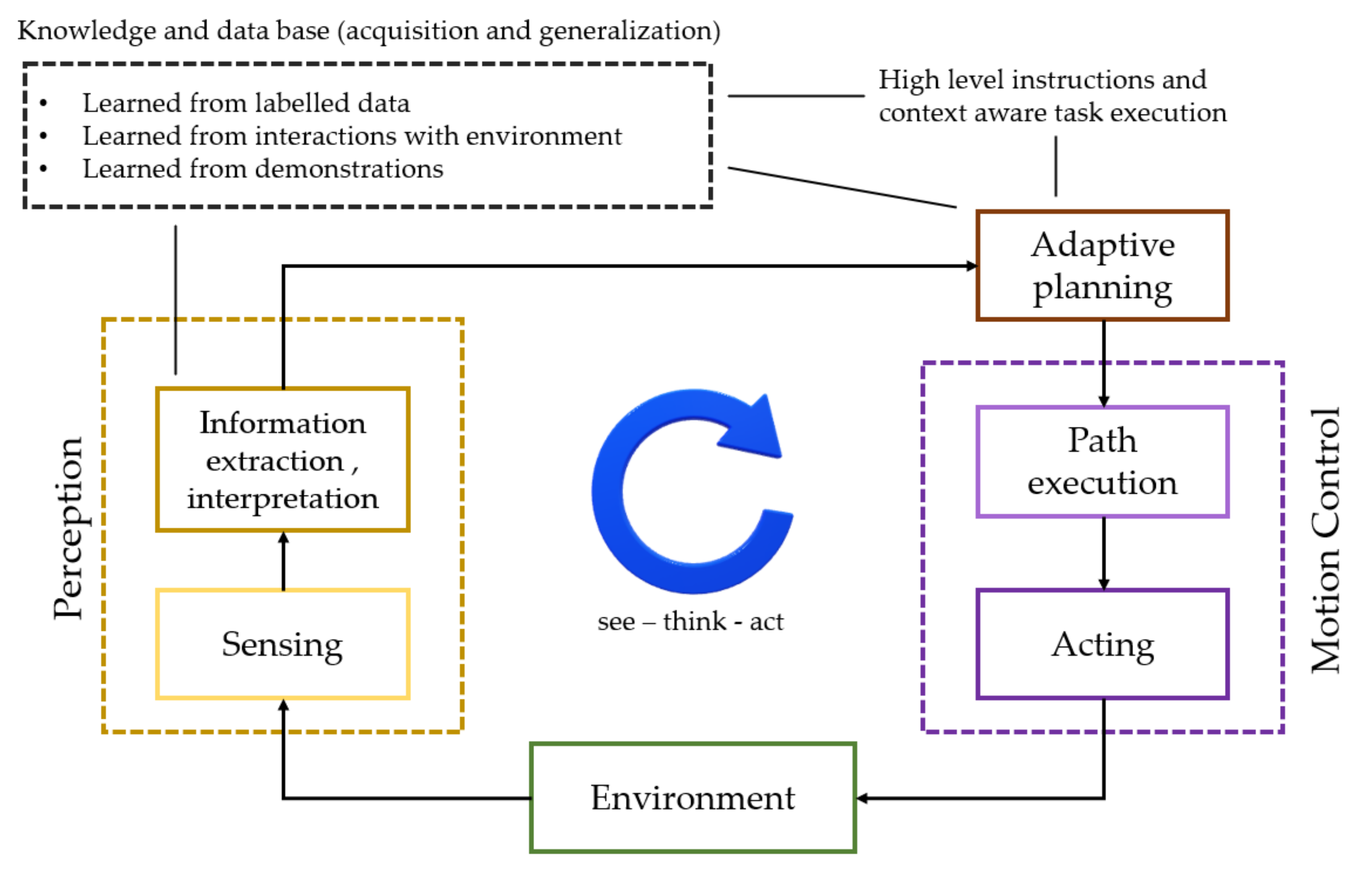
2. Significance of Smart Industrial Robots in Manufacturing
- Perception;
- High-level instruction and context-aware task execution;
- Knowledge acquisition and generalization;
- Adaptive planning;
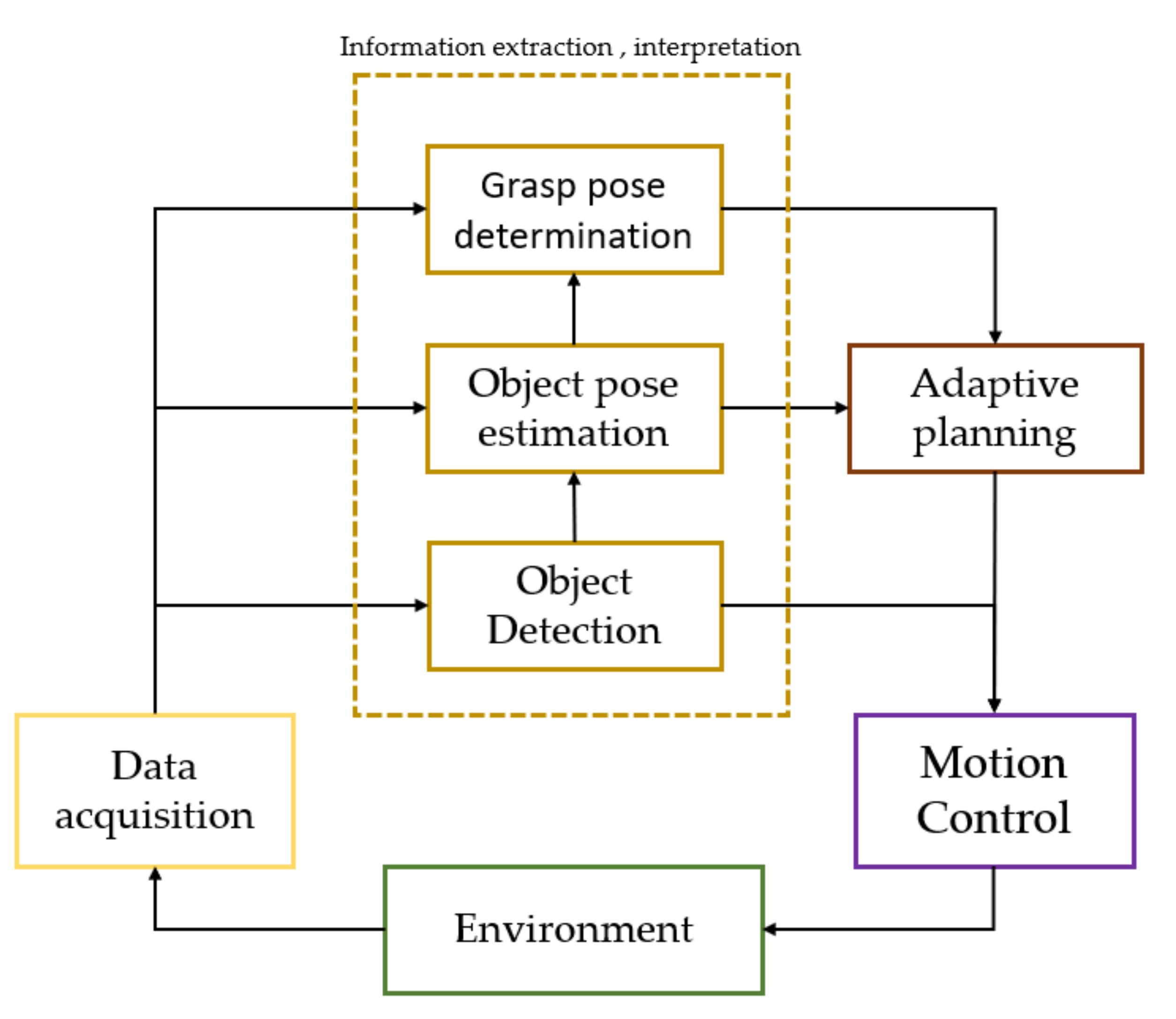
3. Computer Vision-Based Control
- Tasks that require the robots’ end of arm tooling to be precisely positioned for the entire trajectory,
- Tasks that require explicit grasp planning.
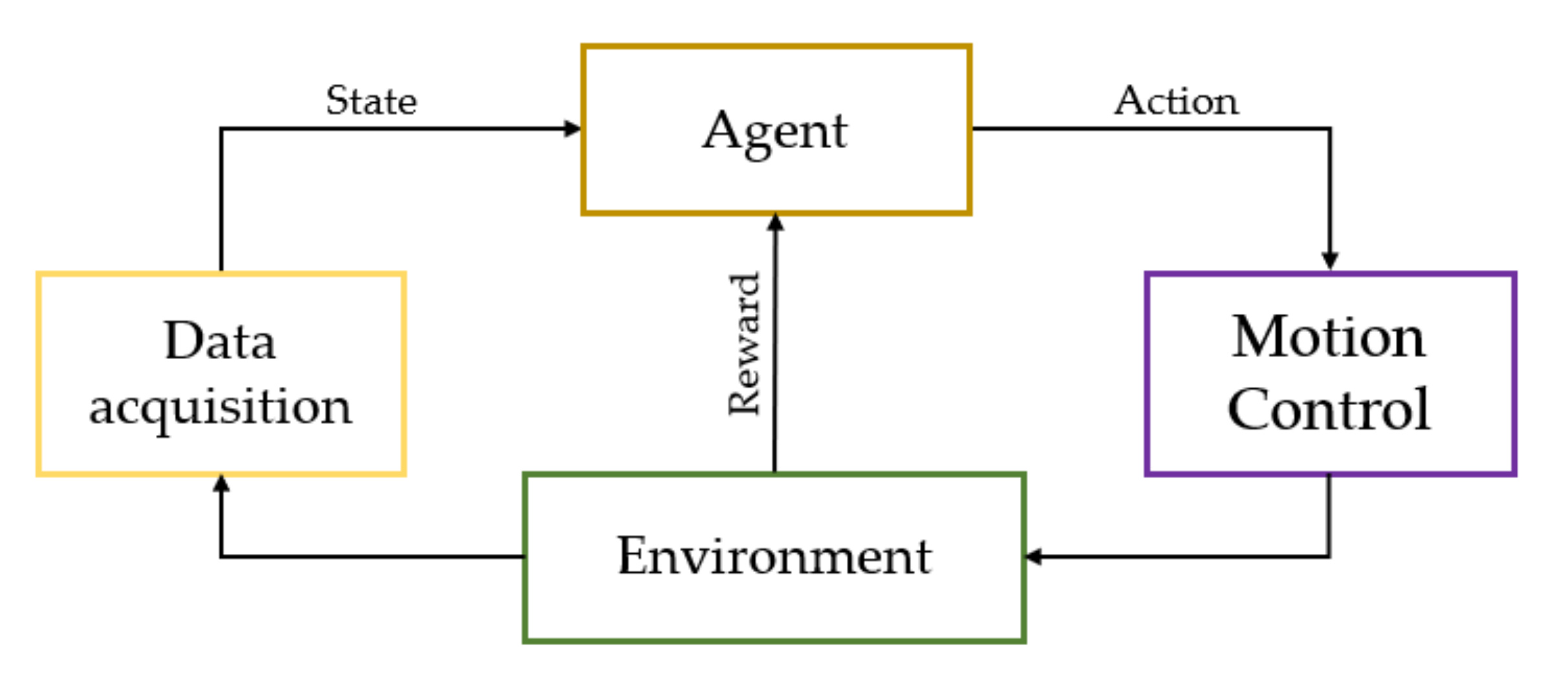
4. Deep Reinforcement Learning-Based Control
4.1. Typical Grasping Scenarios
4.2. Push and Grasp
4.3. Force/torque Information Usage
4.4. DRL-Based Assembly
5. Imitation Learning-Based Control
6. Challenges and Open Issues
6.1. Smart Industrial Robot Deployment and Control
6.2. Reinforced, Imitated or Combined Learning Strategies
6.3. Use of Simulations and Synthetic Data
6.4. The Road to Future Factories
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wallén, J. The History of the Industrial Robot; Linköping University Electronic Press: Linköping, Sweden, 2008. [Google Scholar]
- International Organization for Standardization (ISO). ISO 8373:2012: Robots and Robotic Devices—Vocabulary; International Organization for Standardization: Geneva, Switzerland, 2012. [Google Scholar]
- Wilson, M. Chapter 2—Industrial Robots. In Implementation of Robot Systems; Wilson, M., Ed.; Butterworth-Heinemann: Oxford, UK, 2015; pp. 19–38. [Google Scholar] [CrossRef]
- Carlsson, J. A Decade of Robotics: [Analysis of the Diffusion of Industrial Robots in the 1980s by Countries, Application Areas, Industrial Branches and Types of Robots]; Mekanförbundets Förlag: Stockholm, Sweden, 1991. [Google Scholar]
- Zhong, R.Y.; Xu, X.; Klotz, E.; Newman, S.T. Intelligent Manufacturing in the Context of Industry 4.0: A Review. Engineering 2017, 3, 616–630. [Google Scholar] [CrossRef]
- Executive Summary World Robotics 2021 Industrial Robots. 2021. Available online: https://ifr.org/img/worldrobotics/Executive_Summary_WR_Industrial_Robots_2021.pdf (accessed on 20 November 2021).
- Sanneman, L.; Fourie, C.; Shah, J.A. The state of industrial robotics: Emerging technologies, challenges, and key research directions. arXiv 2020, arXiv:2010.14537. [Google Scholar]
- Pan, Z.; Polden, J.; Larkin, N.; Van Duin, S.; Norrish, J. Recent progress on programming methods for industrial robots. Robot. Comput.-Integr. Manuf. 2012, 28, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Evjemo, L.; Gjerstad, T.; Grøtli, E.; Sziebig, G. Trends in Smart Manufacturing: Role of Humans and Industrial Robots in Smart Factories. Curr. Robot. Rep. 2020, 1, 35–41. [Google Scholar] [CrossRef] [Green Version]
- Probst, L.; Pedersen, B.; Lefebvre, V.; Dakkak, L. USA-China-EU plans for AI: Where do we stand. Digit. Transform. Monit. Eur. Comm. 2018. Available online: https://ati.ec.europa.eu/reports/technology-watch/usa-china-eu-plans-ai-where-do-we-stand-0 (accessed on 13 September 2021).
- Arents, J.; Abolins, V.; Judvaitis, J.; Vismanis, O.; Oraby, A.; Ozols, K. Human–Robot Collaboration Trends and Safety Aspects: A Systematic Review. J. Sens. Actuator Netws. 2021, 10, 48. [Google Scholar] [CrossRef]
- Osterrieder, P.; Budde, L.; Friedli, T. The smart factory as a key construct of industry 4.0: A systematic literature review. Int. J. Prod. Econ. 2020, 221, 107476. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Pham, Q.V.; Prabadevi, B.; Deepa, N.; Dev, K.; Gadekallu, T.R.; Ruby, R.; Liyanage, M. Industry 5.0: A survey on enabling technologies and potential applications. J. Ind. Inf. Integr. 2021. [Google Scholar] [CrossRef]
- Golnazarian, W.; Hall, E. Intelligent Industrial Robots. Cent. Robot. Res. 2002, 1050, 72. [Google Scholar] [CrossRef]
- Shao, L.; Volz, R. Methods and strategies of object localization. In Proceedings of the NASA Conference on Space Telerobotics, Pasadena, CA, USA, 31 January 1989. [Google Scholar]
- Zhang, C.; Lu, Y. Study on artificial intelligence: The state of the art and future prospects. J. Ind. Inf. Integr. 2021, 23, 100224. [Google Scholar] [CrossRef]
- Li, P.; Liu, X. Common Sensors in Industrial Robots: A Review. J. Phys. Conf. Ser. 2019, 1267, 012036. [Google Scholar] [CrossRef] [Green Version]
- Mittal, S.; Khan, M.A.; Romero, D.; Wuest, T. Smart manufacturing: Characteristics, technologies and enabling factors. Proc. Inst. Mech. Eng. Part J. Eng. Manuf. 2019, 233, 1342–1361. [Google Scholar] [CrossRef]
- Abubakr, M.; Abbas, A.T.; Tomaz, I.; Soliman, M.S.; Luqman, M.; Hegab, H. Sustainable and Smart Manufacturing: An Integrated Approach. Sustainability 2020, 12, 2280. [Google Scholar] [CrossRef] [Green Version]
- Arents, J.; Cacurs, R.; Greitans, M. Integration of Computervision and Artificial Intelligence Subsystems with Robot Operating System Based Motion Planning for Industrial Robots. Autom. Control. Comput. Sci. 2018, 52, 392–401. [Google Scholar] [CrossRef]
- Wei, K.; Ren, B. A method on dynamic path planning for robotic manipulator autonomous obstacle avoidance based on an improved RRT algorithm. Sensors 2018, 18, 571. [Google Scholar] [CrossRef] [Green Version]
- Vernon, D.; Vincze, M. Industrial Priorities for Cognitive Robotics. In Proceedings of the EUCognition 2016—“Cognitive Robot Architectures”, Vienna, Austria, 8–9 December 2016; pp. 6–9. [Google Scholar]
- Kraetzschmar, G. Software Engineering Factors for Cognitive Robotics. 2018. Available online: https://cordis.europa.eu/project/id/688441/results (accessed on 3 June 2021).
- Samani, H. Cognitive Robotics; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Premebida, C.; Ambrus, R.; Marton, Z.C. Intelligent robotic perception systems. In Applications of Mobile Robots; IntechOpen: London, UK, 2018. [Google Scholar]
- Dong, S.; Wang, P.; Abbas, K. A survey on deep learning and its applications. Comput. Sci. Rev. 2021, 40, 100379. [Google Scholar] [CrossRef]
- Alom, M.Z.; Taha, T.M.; Yakopcic, C.; Westberg, S.; Sidike, P.; Nasrin, M.S.; Hasan, M.; Van Essen, B.C.; Awwal, A.A.S.; Asari, V.K. A State-of-the-Art Survey on Deep Learning Theory and Architectures. Electronics 2019, 8, 292. [Google Scholar] [CrossRef] [Green Version]
- Kakani, V.; Nguyen, V.H.; Kumar, B.P.; Kim, H.; Pasupuleti, V.R. A critical review on computer vision and artificial intelligence in food industry. J. Agric. Food Res. 2020, 2, 100033. [Google Scholar] [CrossRef]
- Lenz, I.; Lee, H.; Saxena, A. Deep Learning for Detecting Robotic Grasps. Int. J. Robot. Res. 2013, 34, 705–724. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 91–99. [Google Scholar] [CrossRef] [Green Version]
- Zou, Z.; Shi, Z.; Guo, Y.; Ye, J. Object detection in 20 years: A survey. arXiv 2019, arXiv:1905.05055. [Google Scholar]
- Poss, C.; Mlouka, O.B.; Irrenhauser, T.; Prueglmeier, M.; Goehring, D.; Zoghlami, F.; Salehi, V. Robust Framework for intelligent Gripping Point Detection. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 717–723. [Google Scholar] [CrossRef]
- Lin, W.; Anwar, A.; Li, Z.; Tong, M.; Qiu, J.; Gao, H. Recognition and Pose Estimation of Auto Parts for an Autonomous Spray Painting Robot. IEEE Trans. Ind. Inform. 2019, 15, 1709–1719. [Google Scholar] [CrossRef]
- Arents, J.; Greitans, M.; Lesser, B. Construction of a Smart Vision-Guided Robot System for Manipulation in a Dynamic Environment. In Artificial Intelligence for Digitising Industry; River Publishers: Gistrup, Denmark, 2021; pp. 205–220. [Google Scholar]
- Mahler, J.; Matl, M.; Liu, X.; Li, A.; Gealy, D.; Goldberg, K. Dex-Net 3.0: Computing Robust Robot Vacuum Suction Grasp Targets in Point Clouds using a New Analytic Model and Deep Learning. arXiv 2018, arXiv:1709.06670. [Google Scholar]
- Mahler, J.; Matl, M.; Satish, V.; Danielczuk, M.; DeRose, B.; McKinley, S.; Goldberg, K. Learning ambidextrous robot grasping policies. Sci. Robot. 2019, 4, 26. Available online: https://robotics.sciencemag.org/content/4/26/eaau4984.full.pdf (accessed on 14 June 2021).
- Kah, P.; Shrestha, M.; Hiltunen, E.; Martikainen, J. Robotic arc welding sensors and programming in industrial applications. Int. J. Mech. Mater. Eng. 2015, 10, 13. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Lu, J.; Zou, W.; Xu, D. Path planning for surface inspection on a robot-based scanning system. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 2284–2289. [Google Scholar] [CrossRef]
- Skotheim, O.; Lind, M.; Ystgaard, P.; Fjerdingen, S.A. A flexible 3D object localization system for industrial part handling. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 3326–3333. [Google Scholar] [CrossRef]
- Tsai, M.; Fang, J.J.; Chang, J.L. Robotic Path Planning for an Automatic Mold Polishing System. Int. J. Robot. Autom. 2004, 19, 81–90. [Google Scholar] [CrossRef]
- Zhen, X.; Seng, J.C.Y.; Somani, N. Adaptive Automatic Robot Tool Path Generation Based on Point Cloud Projection Algorithm. In Proceedings of the 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 10–13 September 2019; pp. 341–347. [Google Scholar] [CrossRef]
- Peng, R.; Navarro-Alarcon, D.; Wu, V.; Yang, W. A Point Cloud-Based Method for Automatic Groove Detection and Trajectory Generation of Robotic Arc Welding Tasks. In Proceedings of the 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 22–26 June 2020. [Google Scholar]
- Fujita, M.; Domae, Y.; Noda, A.; Garcia Ricardez, G.; Nagatani, T.; Zeng, A.; Song, S.; Rodriguez, A.; Causo, A.; Chen, I.M.; et al. What are the important technologies for bin picking? Technology analysis of robots in competitions based on a set of performance metrics. Adv. Robot. 2020, 34, 560–574. [Google Scholar] [CrossRef]
- Horn, B.; Ikeuchi, K. The Mechanical Manipulation of Randomly Oriented Parts. Sci. Am. 1984, 251, 100–111. [Google Scholar] [CrossRef]
- Marvel, J.A.; Saidi, K.; Eastman, R.; Hong, T.; Cheok, G.; Messina, E. Technology readiness levels for randomized bin picking. In Proceedings of the Workshop on Performance Metrics for Intelligent Systems (PerMI′12) Workshop; Special Publication (NIST SP); National Institute of Standards and Technology: Gaithersburg, MD, USA, 2012; pp. 109–113. [Google Scholar]
- Holz, D.; Topalidou-Kyniazopoulou, A.; Stückler, J.; Behnke, S. Real-time object detection, localization and verification for fast robotic depalletizing. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1459–1466. [Google Scholar]
- Kleeberger, K.; Bormann, R.; Kraus, W.; Huber, M. A Survey on Learning-Based Robotic Grasping. Curr. Robot. Rep. 2020, 1, 239–249. [Google Scholar] [CrossRef]
- Spenrath, F.; Pott, A. Gripping Point Determination for Bin Picking Using Heuristic Search. Procedia CIRP 2017, 62, 606–611. [Google Scholar] [CrossRef]
- He, R.; Rojas, J.; Guan, Y. A 3D Object Detection and Pose Estimation Pipeline Using RGB-D Images. arXiv 2017, arXiv:1703.03940. [Google Scholar]
- Sock, J.; Kim, K.; Sahin, C.; Kim, T.K. Multi-task deep networks for depth-based 6D object pose and joint registration in crowd scenarios. arXiv 2019, arXiv:1806.03891. [Google Scholar]
- Kehl, W.; Manhardt, F.; Tombari, F.; Ilic, S.; Navab, N. SSD-6D: Making RGB-based 3D detection and 6D pose estimation great again. arXiv 2017, arXiv:1711.10006. [Google Scholar]
- Olesen, A.; Gergaly, B.; Ryberg, E.; Thomsen, M.; Chrysostomou, D. A collaborative robot cell for random bin-picking based on deep learning policies and a multi-gripper switching strategy. Procedia Manuf. 2020, 51, 3–10. [Google Scholar] [CrossRef]
- Rad, M.; Lepetit, V. BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for Predicting the 3D Poses of Challenging Objects without Using Depth. arXiv 2018, arXiv:1703.10896. [Google Scholar]
- Xiang, Y.; Schmidt, T.; Narayanan, V.; Fox, D. PoseCNN: A Convolutional Neural Network for 6D Object Pose Estimation in Cluttered Scenes. arXiv 2018, arXiv:1711.00199. [Google Scholar]
- Tremblay, J.; To, T.; Sundaralingam, B.; Xiang, Y.; Fox, D.; Birchfield, S. Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects. arXiv 2018, arXiv:1809.10790. [Google Scholar]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. EPnP: An accurate O(n) solution to the PnP problem. Int. J. Comput. Vis. 2009, 81, 155. [Google Scholar] [CrossRef] [Green Version]
- Morrison, D.; Corke, P.; Leitner, J. Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach. arXiv 2018, arXiv:1804.05172. [Google Scholar]
- Zoghlami, F.; Kurrek, P.; Jocas, M.; Masala, G.; Salehi, V. Design of a Deep Post Gripping Perception Framework for Industrial Robots. J. Comput. Inf. Sci. Eng. 2021, 21, 021003. [Google Scholar] [CrossRef]
- Matsumura, R.; Domae, Y.; Wan, W.; Harada, K. Learning Based Robotic Bin-picking for Potentially Tangled Objects. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 7990–7997. [Google Scholar] [CrossRef]
- Moosmann, M.; Spenrath, F.; Kleeberger, K.; Khalid, M.U.; Mönnig, M.; Rosport, J.; Bormann, R. Increasing the Robustness of Random Bin Picking by Avoiding Grasps of Entangled Workpieces. Procedia CIRP 2020, 93, 1212–1217. [Google Scholar] [CrossRef]
- Silver, D.; Huang, A.; Maddison, C.; Guez, A.; Sifre, L.; Driessche, G.; Schrittwieser, J.; Antonoglou, I.; Panneershelvam, V.; Lanctot, M.; et al. Mastering the game of Go with deep neural networks and tree search. Nature 2016, 529, 484–489. [Google Scholar] [CrossRef]
- Kober, J.; Bagnell, J.A.; Peters, J. Reinforcement learning in robotics: A survey. Int. J. Robot. Res. 2013, 32, 1238–1274. [Google Scholar] [CrossRef] [Green Version]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Liu, R.; Nageotte, F.; Zanne, P.; de Mathelin, M.; Dresp-Langley, B. Deep Reinforcement Learning for the Control of Robotic Manipulation: A Focussed Mini-Review. Robotics 2021, 10, 22. [Google Scholar] [CrossRef]
- Kroemer, O.; Niekum, S.; Konidaris, G. A Review of Robot Learning for Manipulation: Challenges, Representations, and Algorithms. J. Mach. Learn. Res. 2021, 22, 1–82. [Google Scholar]
- Chebotar, Y.; Hausman, K.; Zhang, M.; Sukhatme, G.; Schaal, S.; Levine, S. Combining model-based and model-free updates for trajectory-centric reinforcement learning. In Proceedings of the International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; pp. 703–711. [Google Scholar]
- Arulkumaran, K.; Deisenroth, M.P.; Brundage, M.; Bharath, A.A. Deep Reinforcement Learning: A Brief Survey. IEEE Signal Process. Mag. 2017, 34, 26–38. [Google Scholar] [CrossRef] [Green Version]
- Hua, J.; Zeng, L.; Li, G.; Ju, Z. Learning for a robot: Deep reinforcement learning, imitation learning, transfer learning. Sensors 2021, 21, 1278. [Google Scholar] [CrossRef]
- Zhan, A.; Zhao, P.; Pinto, L.; Abbeel, P.; Laskin, M. A Framework for Efficient Robotic Manipulation. arXiv 2020, arXiv:2012.07975. [Google Scholar]
- Quillen, D.; Jang, E.; Nachum, O.; Finn, C.; Ibarz, J.; Levine, S. Deep reinforcement learning for vision-based robotic grasping: A simulated comparative evaluation of off-policy methods. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6284–6291. [Google Scholar]
- Joshi, S.; Kumra, S.; Sahin, F. Robotic Grasping using Deep Reinforcement Learning. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 1461–1466. [Google Scholar] [CrossRef]
- Wang, Y.; Lan, X.; Feng, C.; Wan, L.; Li, J.; Liu, Y.; Li, D. An experience-based policy gradient method for smooth manipulation. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; pp. 93–97. [Google Scholar] [CrossRef]
- Pedersen, O.M.; Misimi, E.; Chaumette, F. Grasping Unknown Objects by Coupling Deep Reinforcement Learning, Generative Adversarial Networks, and Visual Servoing. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 5655–5662. [Google Scholar] [CrossRef]
- Chen, Y.; Ju, Z.; Yang, C. Combining reinforcement learning and rule-based method to manipulate objects in clutter. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–6. [Google Scholar]
- Zeng, A.; Song, S.; Welker, S.; Lee, J.; Rodriguez, A.; Funkhouser, T. Learning Synergies Between Pushing and Grasping with Self-Supervised Deep Reinforcement Learning. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4238–4245. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Liang, H.; Choi, C. A deep learning approach to grasping the invisible. IEEE Robot. Autom. Lett. 2020, 5, 2232–2239. [Google Scholar] [CrossRef] [Green Version]
- Shin, K.; Sim, M.; Choi, E.; Park, H.; Choi, J.W.; Cho, Y.; Sohn, J.I.; Cha, S.N.; Jang, J.E. Artificial Tactile Sensor Structure for Surface Topography Through Sliding. IEEE/ASME Trans. Mechatronics 2018, 23, 2638–2649. [Google Scholar] [CrossRef]
- Vulin, N.; Christen, S.; Stevšić, S.; Hilliges, O. Improved learning of robot manipulation tasks via tactile intrinsic motivation. IEEE Robot. Autom. Lett. 2021, 6, 2194–2201. [Google Scholar] [CrossRef]
- Merzić, H.; Bogdanović, M.; Kappler, D.; Righetti, L.; Bohg, J. Leveraging contact forces for learning to grasp. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3615–3621. [Google Scholar]
- Johannink, T.; Bahl, S.; Nair, A.; Luo, J.; Kumar, A.; Loskyll, M.; Ojea, J.A.; Solowjow, E.; Levine, S. Residual reinforcement learning for robot control. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6023–6029. [Google Scholar]
- Beltran-Hernandez, C.C.; Petit, D.; Ramirez-Alpizar, I.G.; Nishi, T.; Kikuchi, S.; Matsubara, T.; Harada, K. Learning force control for contact-rich manipulation tasks with rigid position-controlled robots. IEEE Robot. Autom. Lett. 2020, 5, 5709–5716. [Google Scholar] [CrossRef]
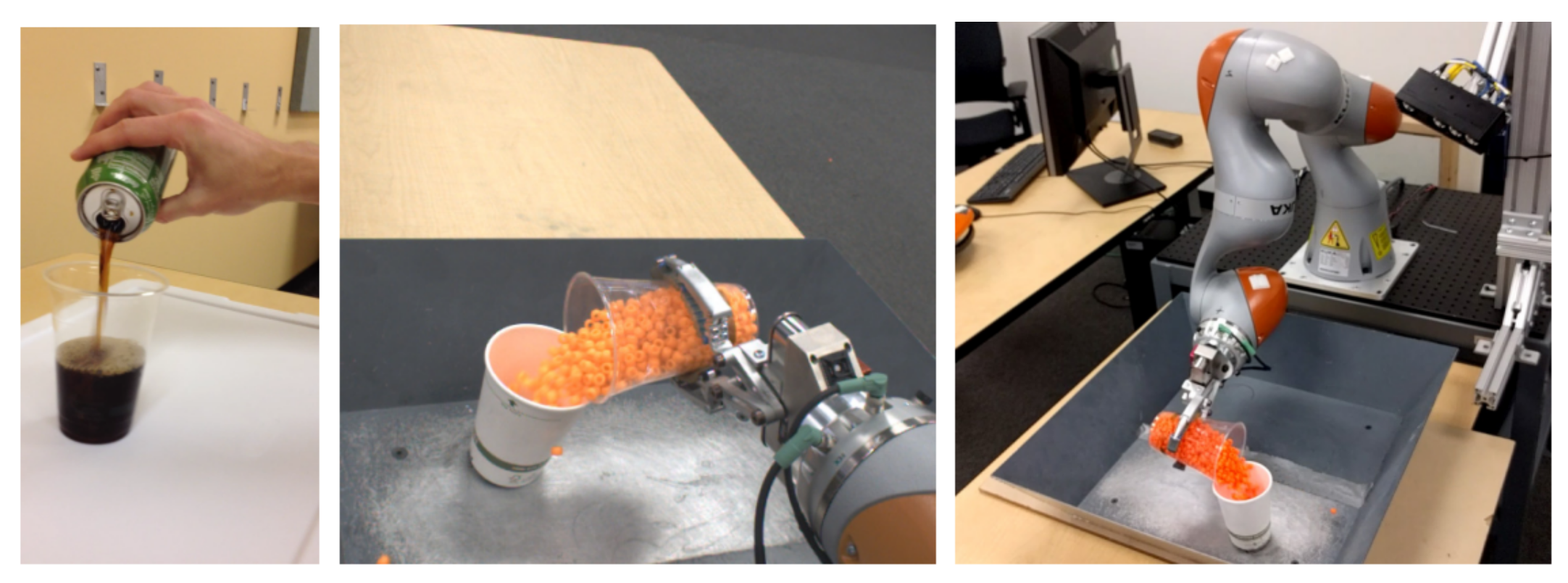
- Huang, S.H.; Zambelli, M.; Kay, J.; Martins, M.F.; Tassa, Y.; Pilarski, P.M.; Hadsell, R. Learning gentle object manipulation with curiosity-driven deep reinforcement learning. arXiv 2019, arXiv:1903.08542. [Google Scholar]
- Melnik, A.; Lach, L.; Plappert, M.; Korthals, T.; Haschke, R.; Ritter, H. Tactile sensing and deep reinforcement learning for in-hand manipulation tasks. In Proceedings of the IROS Workshop on Autonomous Object Manipulation, Venetian Macao, Macau, China, 8 November 2019. [Google Scholar]
- Hundt, A.; Killeen, B.; Greene, N.; Wu, H.; Kwon, H.; Paxton, C.; Hager, G.D. “Good Robot!”: Efficient Reinforcement Learning for Multi-Step Visual Tasks with Sim to Real Transfer. IEEE Robot. Autom. Lett. 2020, 5, 6724–6731. [Google Scholar] [CrossRef]
- Thomas, G.; Chien, M.; Tamar, A.; Ojea, J.A.; Abbeel, P. Learning robotic assembly from cad. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 3524–3531. [Google Scholar]
- Luo, J.; Solowjow, E.; Wen, C.; Ojea, J.A.; Agogino, A.M.; Tamar, A.; Abbeel, P. Reinforcement Learning on Variable Impedance Controller for High-Precision Robotic Assembly. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3080–3087. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Lu, W. Deep reinforcement learning based moving object grasping. Inf. Sci. 2021, 565, 62–76. [Google Scholar] [CrossRef]
- Hu, Z.; Zheng, Y.; Pan, J. Living Object Grasping Using Two-Stage Graph Reinforcement Learning. IEEE Robot. Autom. Lett. 2021, 6, 1950–1957. [Google Scholar] [CrossRef]
- Attia, A.; Dayan, S. Global overview of imitation learning. arXiv 2018, arXiv:1801.06503. [Google Scholar]
- Osa, T.; Pajarinen, J.; Neumann, G.; Bagnell, J.A.; Abbeel, P.; Peters, J. An algorithmic perspective on imitation learning. arXiv 2018, arXiv:1811.06711. [Google Scholar]
- Fang, B.; Jia, S.; Guo, D.; Xu, M.; Wen, S.; Sun, F. Survey of imitation learning for robotic manipulation. Int. J. Intell. Robot. Appl. 2019, 3, 362–369. [Google Scholar] [CrossRef]
- Suomalainen, M.; Abu-Dakka, F.J.; Kyrki, V. Imitation learning-based framework for learning 6-D linear compliant motions. Auton. Robot. 2021, 45, 389–405. [Google Scholar] [CrossRef]
- Gašpar, T.; Nemec, B.; Morimoto, J.; Ude, A. Skill learning and action recognition by arc-length dynamic movement primitives. Robot. Auton. Syst. 2018, 100, 225–235. [Google Scholar] [CrossRef] [Green Version]
- Perico, C.A.V.; De Schutter, J.; Aertbeliën, E. Combining imitation learning with constraint-based task specification and control. IEEE Robot. Autom. Lett. 2019, 4, 1892–1899. [Google Scholar] [CrossRef]
- Gubbi, S.; Kolathaya, S.; Amrutur, B. Imitation Learning for High Precision Peg-in-Hole Tasks. In Proceedings of the 2020 6th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 20–23 April 2020; pp. 368–372. [Google Scholar]
- Zhang, T.; McCarthy, Z.; Jow, O.; Lee, D.; Chen, X.; Goldberg, K.; Abbeel, P. Deep imitation learning for complex manipulation tasks from virtual reality teleoperation. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 5628–5635. [Google Scholar]
- Sermanet, P.; Lynch, C.; Chebotar, Y.; Hsu, J.; Jang, E.; Schaal, S.; Levine, S.; Brain, G. Time-contrastive networks: Self-supervised learning from video. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1134–1141. [Google Scholar]
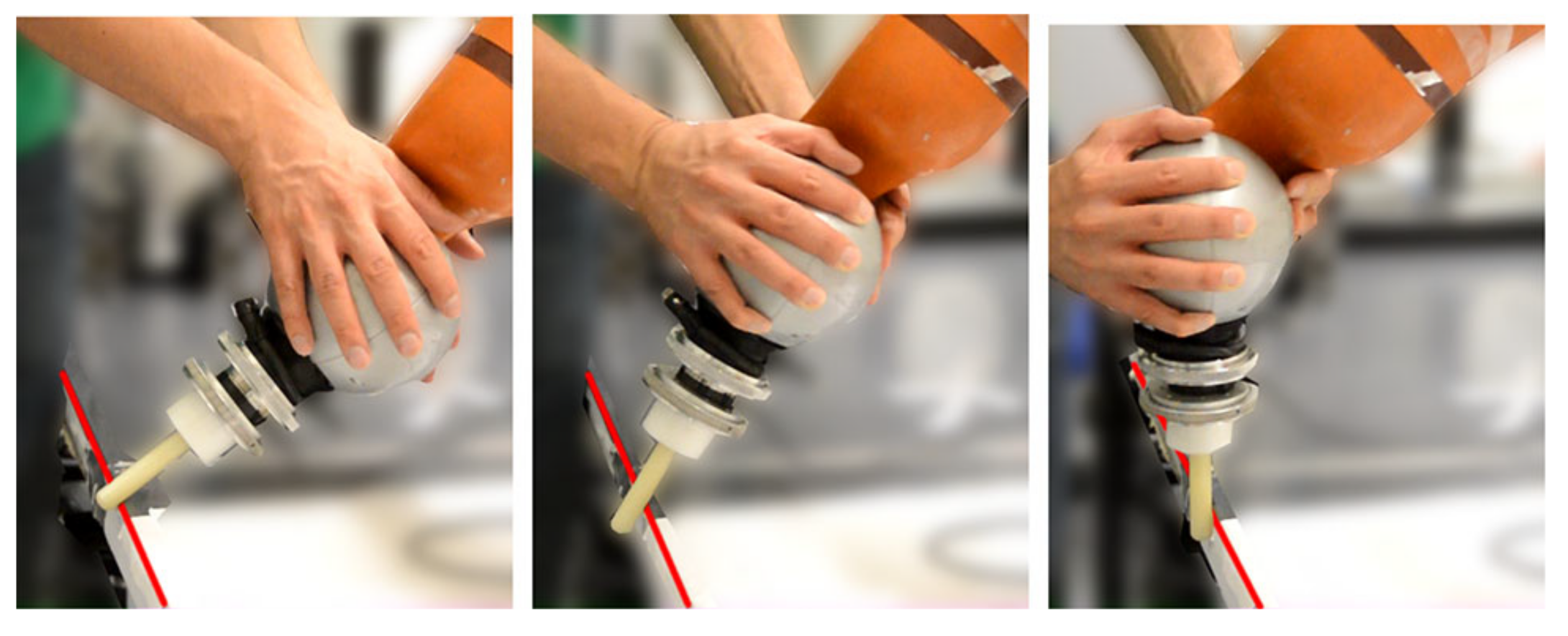
- Edmonds, M.; Gao, F.; Xie, X.; Liu, H.; Qi, S.; Zhu, Y.; Rothrock, B.; Zhu, S.C. Feeling the force: Integrating force and pose for fluent discovery through imitation learning to open medicine bottles. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3530–3537. [Google Scholar]
- Andtfolk, M.; Nyholm, L.; Eide, H.; Fagerström, L. Humanoid robots in the care of older persons: A scoping review. Assist. Technol. 2021, 1–9, Online ahead of print. [Google Scholar] [CrossRef]
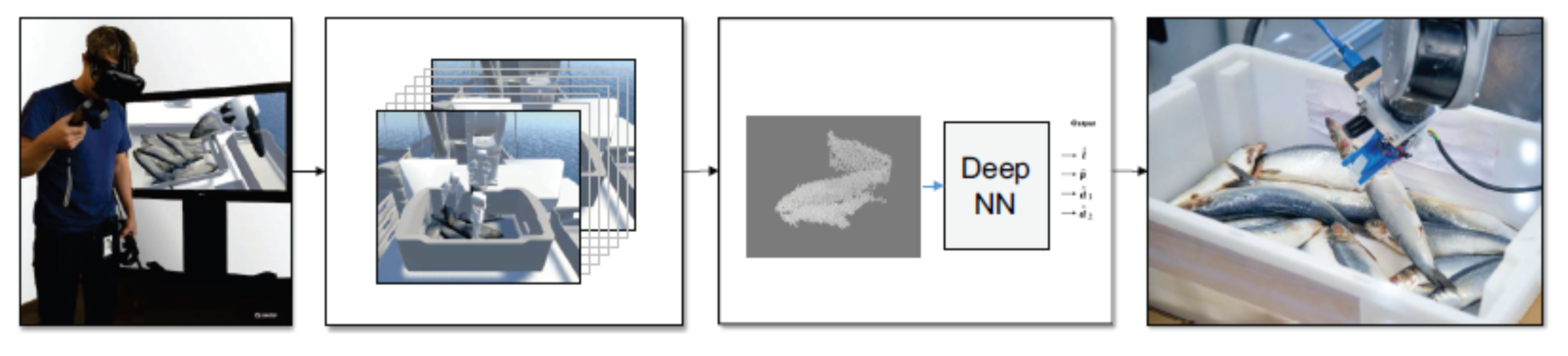
- Dyrstad, J.S.; Øye, E.R.; Stahl, A.; Mathiassen, J.R. Teaching a robot to grasp real fish by imitation learning from a human supervisor in virtual reality. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7185–7192. [Google Scholar]
- Kober, J.; Peters, J. Policy search for motor primitives in robotics. Mach. Learn. 2011, 84, 171–203. [Google Scholar] [CrossRef] [Green Version]
- Karnouskos, S.; Sinha, R.; Leitão, P.; Ribeiro, L.; Strasser, T.I. The applicability of ISO/IEC 25023 measures to the integration of agents and automation systems. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2927–2934. [Google Scholar]
- Smids, J.; Nyholm, S.; Berkers, H. Robots in the Workplace: A Threat to—Or Opportunity for—Meaningful Work? Philos. Technol. 2020, 33, 503–522. [Google Scholar] [CrossRef] [Green Version]
- Wadsworth, E.; Walters, D. Safety and Health at the Heart of the Future of Work: Building on 100 Years of Experience; International Labour Office: Geneva, Switzerland, 2019. [Google Scholar]
- Giffi, C.; Wellener, P.; Dollar, B.; Manolian, H.A.; Monck, L.; Moutray, C. Deloitte and The Manufacturing Institute Skills Gap and Future of Work Study; Deloitte Insights: Birmingham, AL, USA, 2018; Available online: https://www2.deloitte.com/content/dam/insights/us/articles/4736_2018-Deloitte-skills-gap-FoW-manufacturing/DI_2018-Deloitte-skills-gap-FoW-manufacturing-study.pdf (accessed on 25 August 2021).
- Urlini, G.; Arents, J.; Latella, A. AI in Industrial Machinery. In Artificial Intelligence for Digitising Industry; River Publishers: Gistrup, Denmark, 2021; pp. 179–185. [Google Scholar]
- Jakobi, N.; Husb, P.; Harvey, I. Noise and The Reality Gap: The Use of Simulation in Evolutionary Robotics. In Proceedings of the European Conference on Artificial Life, Lausanne, Switzerland, 13–17 September 1999. [Google Scholar] [CrossRef]
- Zeng, R.; Wen, Y.; Zhao, W.; Liu, Y.J. View planning in robot active vision: A survey of systems, algorithms, and applications. Comput. Vis. Media 2020, 6, 225–245. [Google Scholar] [CrossRef]
- Zhang, T.; Mo, H. Reinforcement learning for robot research: A comprehensive review and open issues. Int. J. Adv. Robot. Syst. 2021, 18, 1–22. [Google Scholar] [CrossRef]
- Choi, H.; Crump, C.; Duriez, C.; Elmquist, A.; Hager, G.; Han, D.; Hearl, F.; Hodgins, J.; Jain, A.; Leve, F.; et al. On the use of simulation in robotics: Opportunities, challenges, and suggestions for moving forward. Proc. Natl. Acad. Sci. USA 2021, 118, e1907856118. [Google Scholar] [CrossRef]
- Cognilytica. Data Engineering, Preparation, and Labeling for AI. 2019. Available online: https://www.cloudfactory.com/reports/data-engineering-preparation-labeling-for-ai (accessed on 20 November 2021).
- Roh, Y.; Heo, G.; Whang, S. A Survey on Data Collection for Machine Learning: A Big Data—AI Integration Perspective. IEEE Trans. Knowl. Data Eng. 2019, 33, 1328–1347. [Google Scholar] [CrossRef] [Green Version]
- Éric Noël Laflamme, C.; Pomerleau, F.; Giguère, P. Driving Datasets Literature Review. arXiv 2019, arXiv:1910.11968. [Google Scholar]
- Vanschoren, J.; Van Rijn, J.N.; Bischl, B.; Torgo, L. OpenML: Networked science in machine learning. ACM SIGKDD Explor. Newsl. 2014, 15, 49–60. [Google Scholar] [CrossRef] [Green Version]
- Bertolini, M.; Mezzogori, D.; Neroni, M.; Zammori, F. Machine Learning for industrial applications: A comprehensive literature review. Expert Syst. Appl. 2021, 175, 114820. [Google Scholar] [CrossRef]
- Levine, S.; Pastor, P.; Krizhevsky, A.; Quillen, D. Learning Hand-Eye Coordination for Robotic Grasping with Deep Learning and Large-Scale Data Collection. Int. J. Robot. Res. 2016, 37, 421–436. [Google Scholar] [CrossRef]
- De Vet, J.M.; Nigohosyan, D.; Ferrer, J.N.; Gross, A.K.; Kuehl, S.; Flickenschild, M. Impacts of the COVID-19 Pandemic on EU Industries; European Parliament: Strasbourg, Francuska, 2021; Available online: https://www.europarl.europa.eu/RegData/etudes/STUD/2021/662903/IPOL_STU(2021)662903_EN.pdf (accessed on 12 October 2021).
- Atkinson, R.D. Robotics and the Future of Production and Work; Technical Report; Information Technology and Innovation Foundation: Washington, DC, USA, 2019; Available online: https://itif.org/publications/2019/10/15/robotics-and-future-production-and-work (accessed on 5 September 2021).
- Demir, K.A.; Döven, G.; Sezen, B. Industry 5.0 and human-robot co-working. Procedia Comput. Sci. 2019, 158, 688–695. [Google Scholar] [CrossRef]
- Bröhl, C.; Nelles, J.; Brandl, C.; Mertens, A.; Nitsch, V. Human–robot collaboration acceptance model: Development and comparison for Germany, Japan, China and the USA. Int. J. Soc. Robot. 2019, 11, 709–726. [Google Scholar] [CrossRef] [Green Version]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arents, J.; Greitans, M. Smart Industrial Robot Control Trends, Challenges and Opportunities within Manufacturing. Appl. Sci. 2022, 12, 937. https://doi.org/10.3390/app12020937
Arents J, Greitans M. Smart Industrial Robot Control Trends, Challenges and Opportunities within Manufacturing. Applied Sciences. 2022; 12(2):937. https://doi.org/10.3390/app12020937
Chicago/Turabian StyleArents, Janis, and Modris Greitans. 2022. "Smart Industrial Robot Control Trends, Challenges and Opportunities within Manufacturing" Applied Sciences 12, no. 2: 937. https://doi.org/10.3390/app12020937