
Helicopter Takeoff and Landing Point Location in Cities for Emergency Services
Abstract
:1. Introduction
2. Operation Scenario Setting
2.1. Description
- Aircraft: According to the requirements of the CAAC for general aviation rescue, helicopter Mi-8 was selected for analysis.
- Flight regulations and rescue missions: In a low-altitude environment, pilots use visual flight rules to perform rescue missions. In this paper, the search and rescue points and hospitals in the rescue area were set, and the rescue tasks were mainly to transport materials and transfer the people.
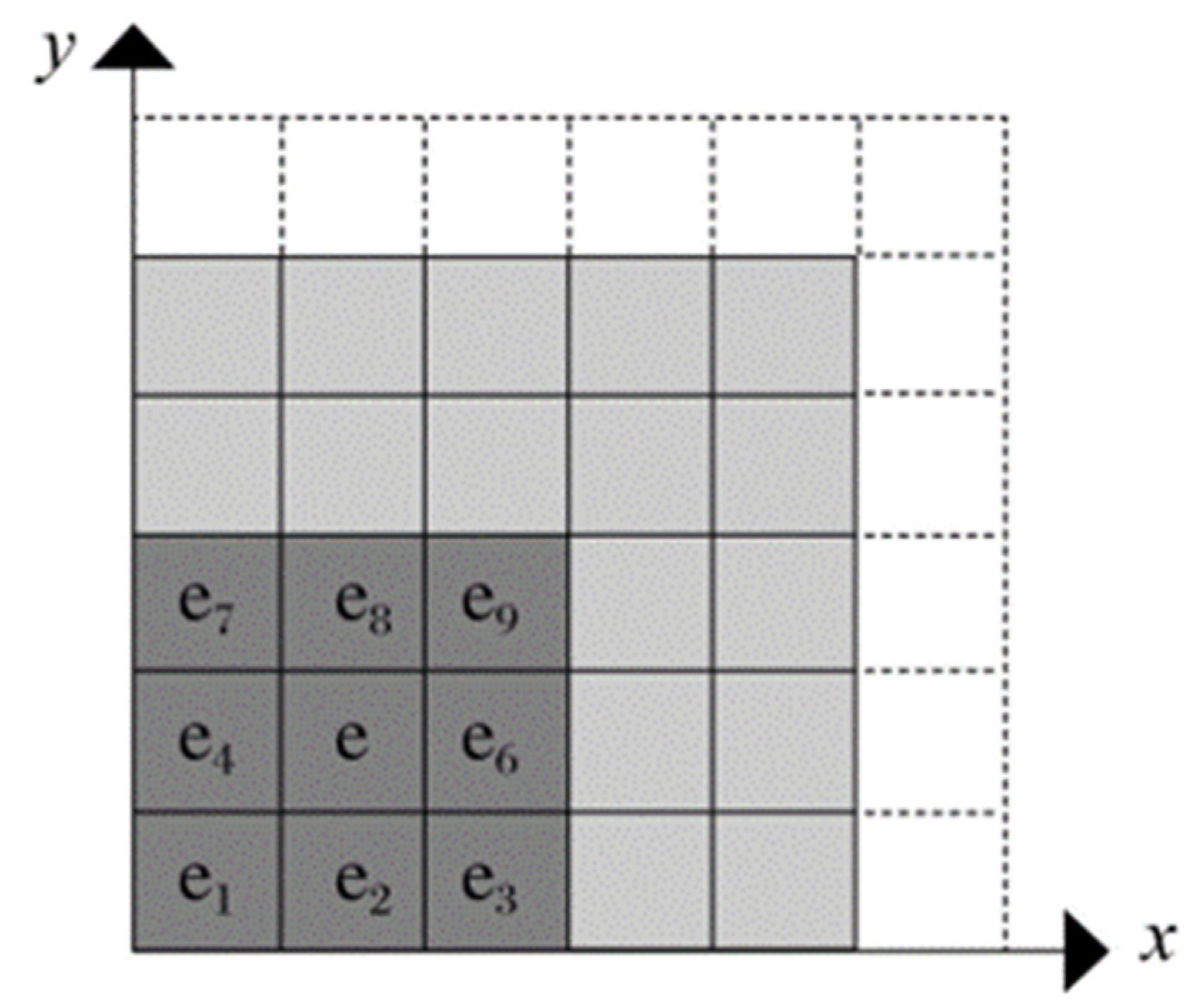
- Grid division: For terrain data processing, 30 m-precision elevation data was used to divide the grid, the WGS-84 coordinate system (World Geodetic System-1984 Coordinate System) was used to depict all the latitude and longitude coordinates. The WGS-84 system is a well-accepted coordinate system and suitable for GIS. It has a wide range of applications in navigation, search and rescue. It is a fit system for the study. Raster data are obtained from files containing raster graphics, such as TIFF, which are available on the Geospatial Data Cloud website. We projected the raster data in the corresponding coordinate system; all raster data were georeferenced and mask extracted and could be directly used for analysis.
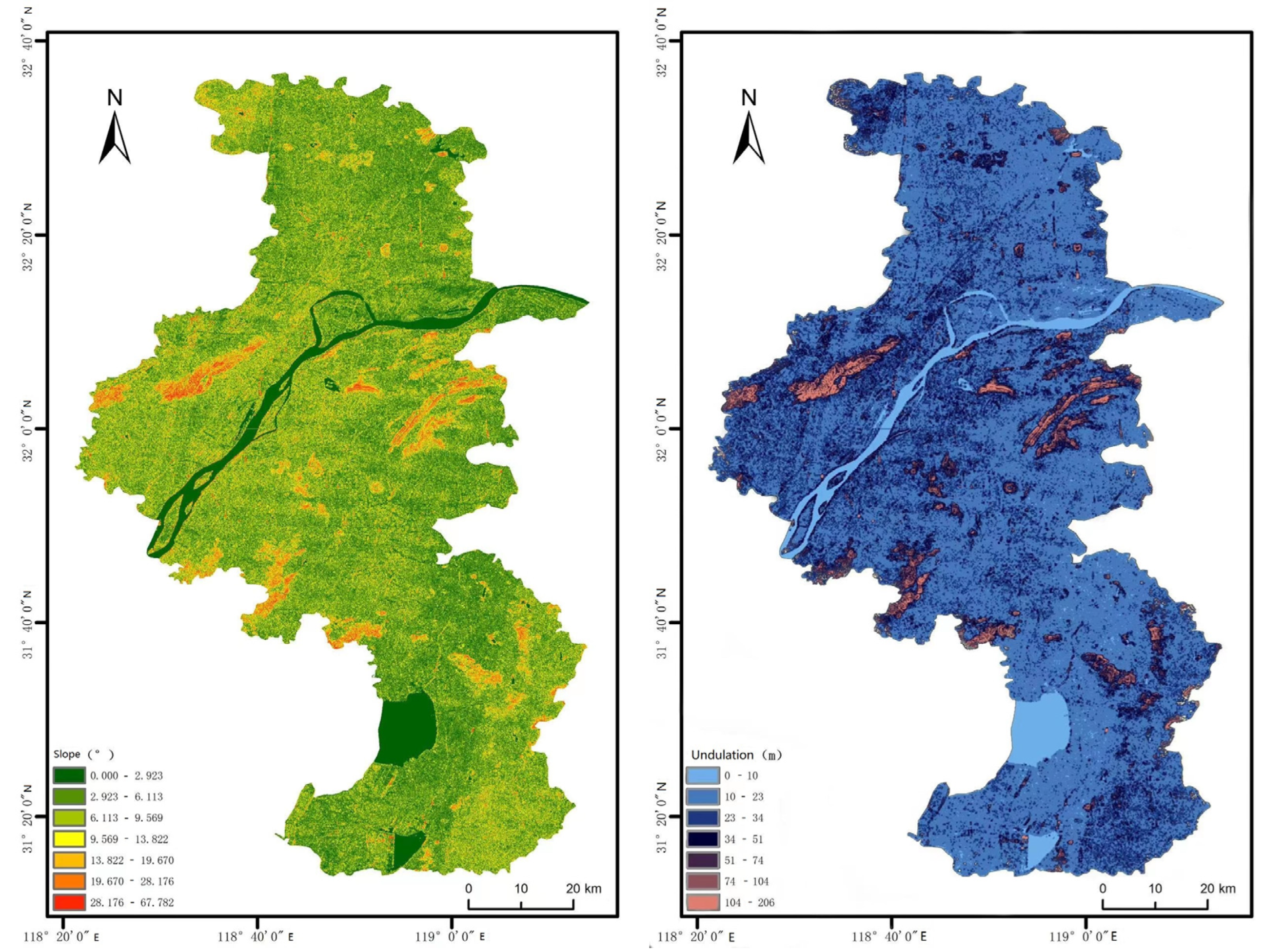
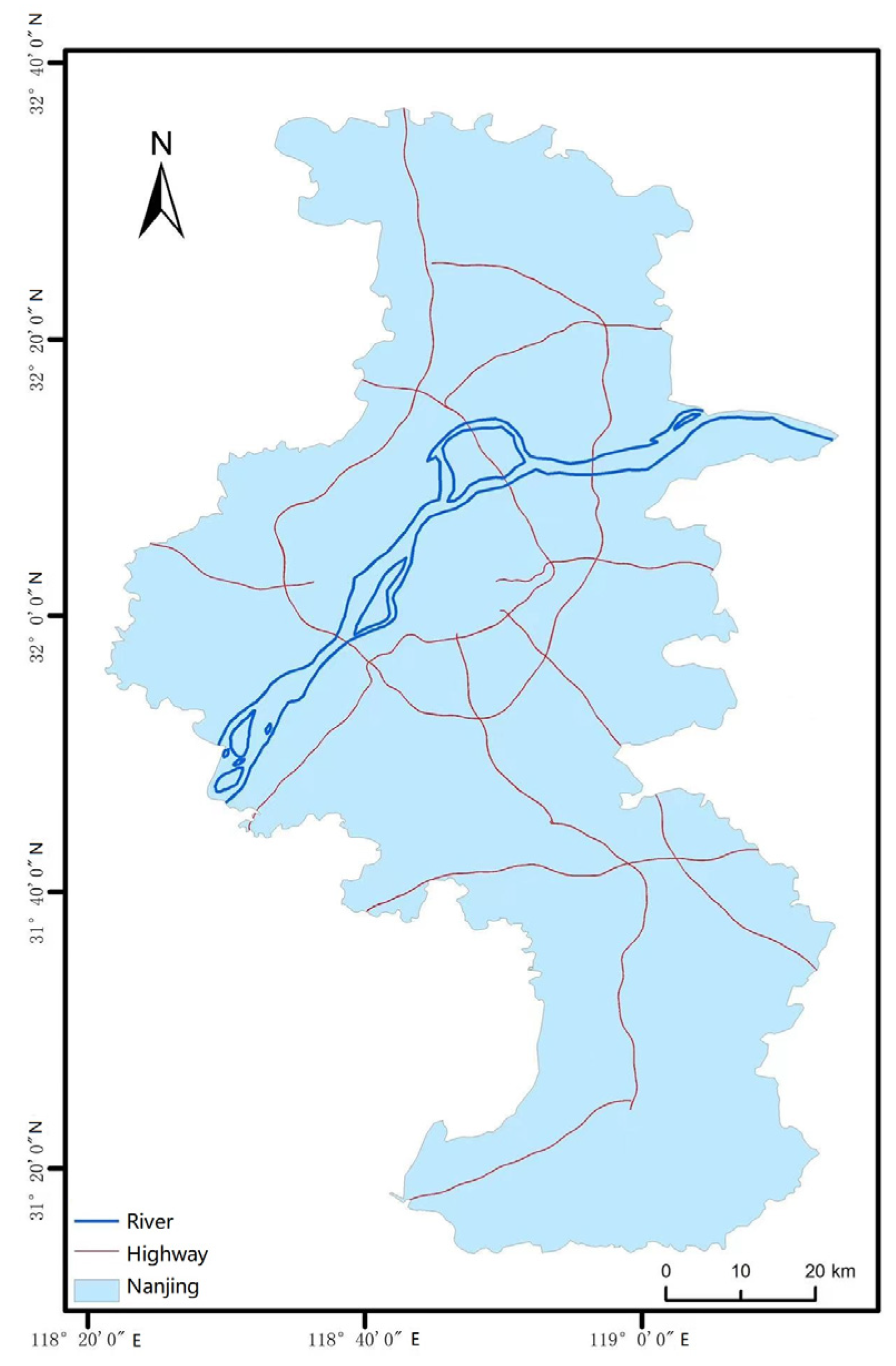
- Environmental factors: For the terrain slope, for the sake of simplicity, the requirement was limited to no more than 5 degrees, which is the only criteria stipulated by the regulation. As for hillside, longitudinal profile, and relief complexity, they will be studied in a further study. Additionally, slope, elevation(H) and undulation(F) were also considered. Road network and other restricted areas were also included in the study. These factors are discussed in detail in the following section.
2.2. Environmental Factors
- Terrain
- 2.
- Area requirement
- 3.
- Barrier buffer
2.3. Basic Principles
2.3.1. Surface Flatness
2.3.2. Visibility
3. Data Processing Using ArcGIS and Methods
3.1. Data Preparation
- Terrain data
- 2.
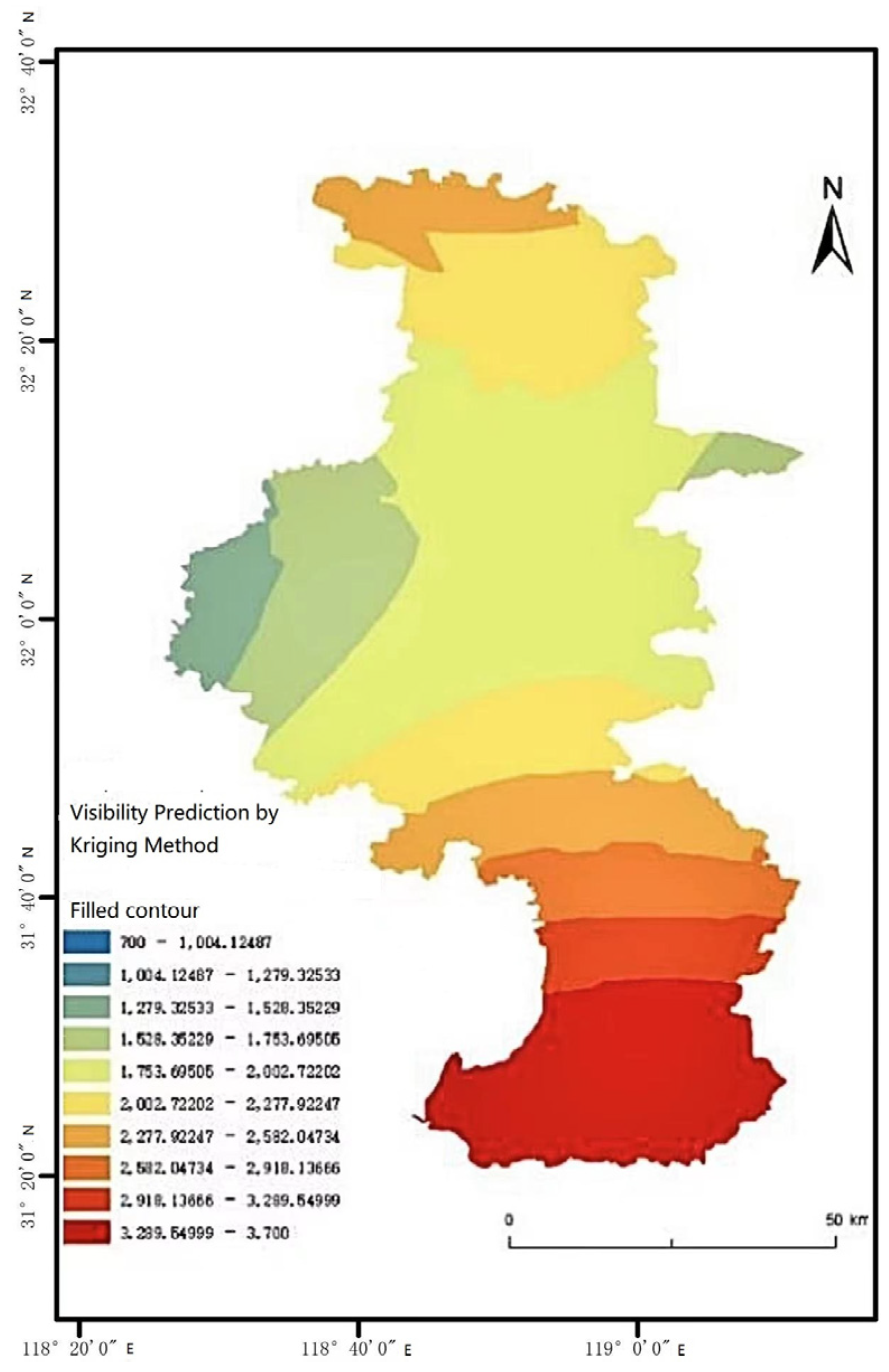
- Meteorological data
3.2. Data Processing
3.2.1. Extraction of Terrain Factors
3.2.2. Building of Terrain Obstacle Buffer Zone
3.2.3. Visibility Interpolation
3.2.4. Feature Layers Filtering
3.2.5. Analysis of Results
4. Optimization of Selection Based on the Greedy Algorithm
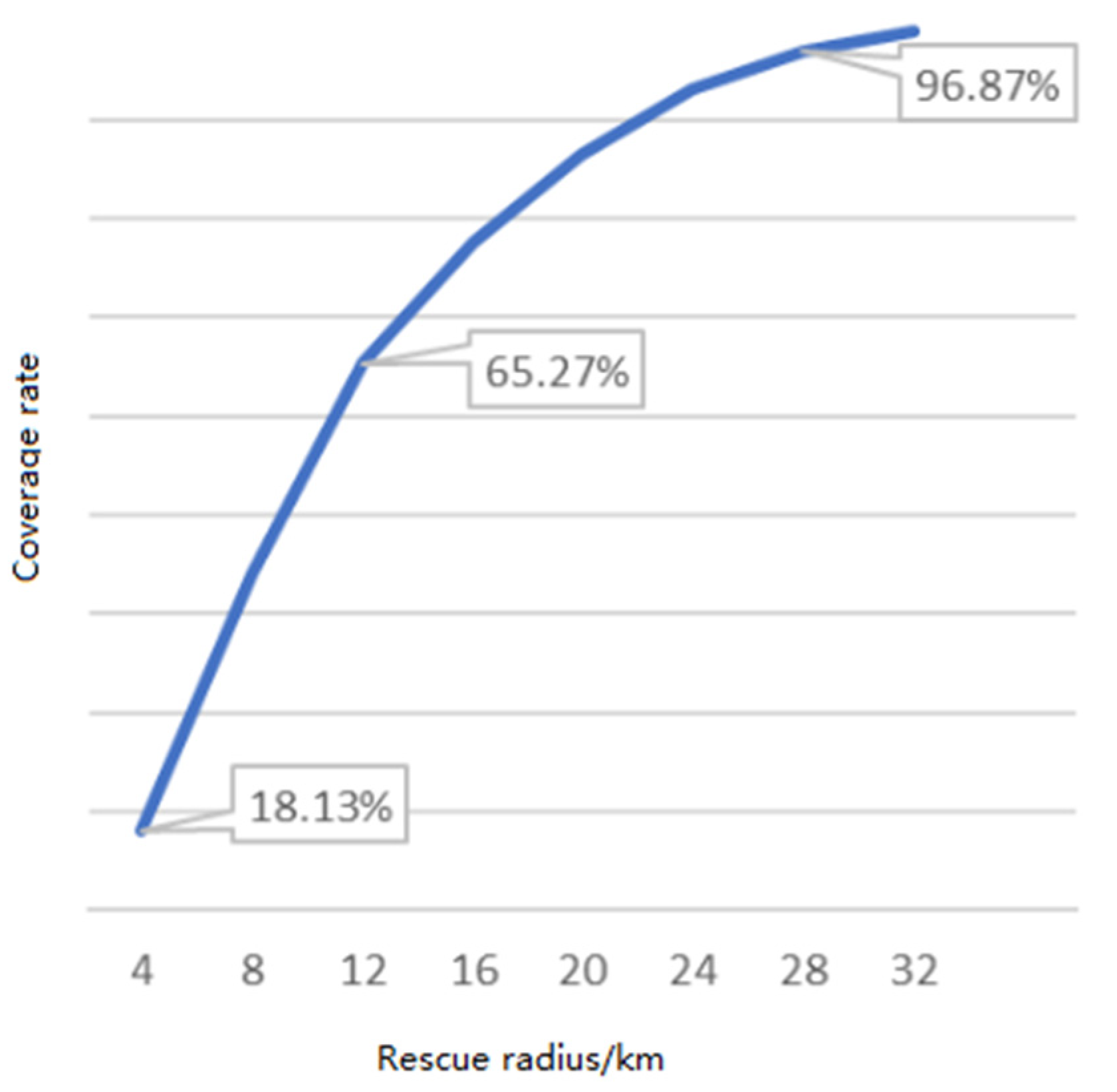
4.1. Rescue Radius Selection
4.2. Construction of the Greedy Algorithm Model
- Cost of helicopter transportation is proportional to the distance;
- Site with the largest coverage area is selected first;
- Newly added coverage must intersect with the covered surface;
- Terminate when the coverage is greater than 95%.
4.3. Location Optimization
4.3.1. Initial Location Optimization
4.3.2. Promotion of Optimized Location
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Valjarević, A.; Radovanović, D.; Svetislav, Š.; Nikola, B.; Nikola, M.; Jelena, G.; Marko, I. GIS and geographical analysis of the main harbors in the world. Open Geosci. 2021, 1, 639–650. [Google Scholar] [CrossRef]
- Chen, J.; Stern, T. Throughput analysis, optimal buffer allocation, and traffic imbalance study of a generic nonblocking packet switch. IEEE J. Sel. Areas Commun. 1991, 3, 439–449. [Google Scholar] [CrossRef]
- Ren, Z.G.; Sun, Q.; Guo, J.; Wang, H.; Kan, Y.H. Fuzzy overlay address choosing model of helicopter emergency landing. J. Geom. Sci. Technol. 2012, 29, 71–74. [Google Scholar]
- Cui, G.S.; Han, S.C.; Zhu, X.P. Research on dynamic dispatching of airport emergency resources based on agent. Mod. Transp. Technol. 2009, 6, 78–81. [Google Scholar]
- Zou, X.; Liu, J.; Zhang, J. Simulation of Chinese ambulance helicopter base site selection based of Greedy algorithm. In Proceedings of the 21 China Simulation Technology Conference, Xiamen, China, 17–18 December 2021; pp. 138–141+154. [Google Scholar]
- Cui, G.H.; Chen, C.Y.; Yin, D.L. Safety evaluation of shipboard helicopter’s surface takeoff and landing wind field environment based on atomized cloud. Ship Electron. Eng. 2021, 41, 122–125. [Google Scholar]
- Wu, Y.J.; Wang, Y.; Chen, C.Y.; Li, J.S. Cloud model based helicopter landing and take-off safety assessment. Comput. Inf. Technol. 2020, 28, 35–38. [Google Scholar]
- Wu, Y.J.; Wang, Y.; Chen, C.Y.; Li, J.S. Intuitionistic fuzzy decision evaluation for the safety of shipborne helicopters. Ship Electron. Eng. 2021, 41, 164–166+178. [Google Scholar]
- Li, Y.; Zhang, H.L.; Zhang, H.; Liu, D. Research on the safety of multi-aircraft cooperative launch and recovery of shipboard helicopoters. Ship Eng. 2021, 43, 124–129+145. [Google Scholar]
- Zhao, J.; Ma, D.L.; Liu, J.F.; Luo, J. The influence of landing path on the flight characteristics for a shipboard helicopter. Helicopter Tech. 2021, 18–24+31. [Google Scholar] [CrossRef]
- Baldacci, R.; Caserta, M.; Traversi, E.; Wolfler, C.R. Robustness of solutions to the capacitated facility location problem with uncertain demand. Optim. Lett. 2022, 2022. [Google Scholar] [CrossRef]
- Ryu, J.; Park, S. A branch-and-price algorithm for the robust single-source capacitated facility location problem under demand uncertainty. EURO J. Transp. Logist. 2022, 11, 100069. [Google Scholar] [CrossRef]
- Oliveira, F.A.; de Sá, E.M.; de Souza, S.R. Benders decomposition applied to profit maximizing hub location problem with incomplete hub network. Comput. Oper. Res. 2022, 142, 105715. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Ning, A.B.; Fu, T.Y.; Yin, S.M.; Zhang, H.Z. Branch and bound algorithm for minimum cost charging station location problem. Appl. Res. Comput. 2022, 39, 80–83. [Google Scholar]
- Zhou, H.; Hu, X.B.; Zhou, J.; Yang, H.J. An efficient genetic method for multi-objective location optimization of multiple city air terminals. IEEE Access 2021, 9, 108665–108674. [Google Scholar] [CrossRef]
- Vikas, S.B.; Nidhi, S.P.; Vivek, S. Artificial immune system based approach for size and location optimization of distributed generation in distribution system. Int. J. Syst. Assur. Eng. Manag. 2019, 10, 339–349. [Google Scholar]
- Srinivasa, R.G.; Kiran, J.; Preetham, G.; Das, D.; Bansal, R.C. Grasshopper optimization algorithm based two stages fuzzy multiobjective approach for optimum sizing and placement of distributed generations, shunt capacitors and electric vehicle charging stations. J. Energy Storage 2020, 27, 101117. [Google Scholar]
- Civil Aviation Administration of China. Technical Standard for Flight Site of Civil Heliport; China Civil Aviation Press: Beijing, China, 2014.
- Marcin, L.; Piotr, B. Conversion between Cartesian and geodetic coordinates on a rotational ellipsoid by solving a system of nonlinear equations. Geod. Cartogr. 2011, 60, 145–159. [Google Scholar]
- Zhan, D.; Cheng, Y.; Liu, J. Expected improvement matrix-based infill criteria for expensive multiobjective optimization. IEEE Trans. Evol. Comput. 2017, 21, 956–975. [Google Scholar] [CrossRef]
- Operation requirements of rotorcraft water platform. In Bulletin of the General Administration of Civil Aviation of China; General Administration of Civil Aviation of China: Changsha, China, 2006; pp. 70–73.
- Tomokazu, M.; Takanobu, O.; Masanori, K.; Kazuki, M.; Takanori, Y.; Yoshiaki, H.; Shoji, Y.; Kunihiro, M.; Hirotoshi, I.; Tetsuya, N. The latest situation of the actual dispatch of Doctor-heli to traffic accident cases using advanced automatic collision notification (D-Call Net) (2015–2021). J. Jpn. Soc. Emer. Med. 2021, 24, 830–832. [Google Scholar]
- Yu, J. Research on Location and Scheduling of Joint Air-Ground in Medical Rescue; Nanjing University of Aeronautics and Astronautics: Nanjing, China, 2018. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Core Parameter | Tech Requirement | Remarks |
|---|---|---|---|
| Site evenness | Slope/° | ≤5 | surface rock and hard soil |
| F/m | ≤0.5 | ||
| Area of temporary stop area | S/m2 | ≥85 | equivalent area for square |
| Visibility | v/m | ≥1600 | visual flight requirement under 1000 ft |
| Safe clearance of obstacles | H ≥ 3D | ≥41 | theoretical value |
| H ≤ 10 | ≥50 | actual operating value | |
| H > 10 | ≥80 |
| Code | Name | Longitude/° | Latitude/° | Elevation/m |
|---|---|---|---|---|
| 58238 | Nanjing | 118.90 | 31.93 | 36.4 |
| 58235 | Luhe | 118.85 | 32.37 | 12.3 |
| 58237 | Pukou | 118.58 | 32.07 | 46.6 |
| 58339 | Gaochun | 118.90 | 31.33 | 20.9 |
| 58340 | Lishui | 119.03 | 31.65 | 27.0 |
| 58242 | Yizhen | 119.17 | 32.30 | 23.5 |
| 58344 | Jurong | 119.20 | 31.97 | 35.0 |
| 58331 | Hexian | 118.37 | 31.73 | 23.5 |
| 58336 | Ma’anshan | 118.57 | 31.70 | 81.2 |
| Time | Rainfall/mm | Visibility/m | Cloudage/% | Wind Speed/ m/s | Ceiling/m |
|---|---|---|---|---|---|
| 0200 | 4.0 | 2100 | 100 | 9 | 600~1000 |
| 0500 | 3.0 | 1900 | 100 | 9 | 1000~1500 |
| 0800 | 3.0 | 1700 | 100 | 8 | 600~1000 |
| 1100 | 1.0 | 1500 | 100 | 8 | 600~1000 |
| 1400 | 0.2 | 1300 | 100 | 8 | 1000~1500 |
| 1700 | 0.1 | 1100 | 100 | 8 | 600~1000 |
| 2000 | 0 | 1700 | 100 | 6 | 1000~1500 |
| 2300 | 0 | 3400 | 100 | 6 | 9999 |
| No. | Longitude/° | Latitude/° |
|---|---|---|
| 1 | 119.0928 | 32.2183 |
| 2 | 119.0301 | 31.3250 |
| 3 | 119.0066 | 32.2029 |
| 4 | 118.9946 | 32.2005 |
| 5 | 118.9172 | 32.0416 |
| 6 | 118.8749 | 31.8023 |
| 7 | 118.7983 | 32.0703 |
| 8 | 118.7896 | 32.0699 |
| 9 | 118.7872 | 32.0827 |
| 10 | 118.7852 | 32.0711 |
| 11 | 118.7601 | 32.2026 |
| 12 | 118.7191 | 32.0662 |
| 13 | 118.4501 | 32.0317 |
| 14 | 118.3416 | 31.3601 |
| Greedy Algorithm Framework for Location | |
|---|---|
| Step 1: | Input all initial location coordinate sets , constraint function |
| Step 2: | Set the number of nodes k |
| Step 3: | Set the initial location point coordinate set |
| Step 4: | |
| (1) | |
| (2) | |
| Step 5: | end for |
| Step 6: | Coverage C ≥ 95%? |
| (Yes) return Step7 | |
| (No) p = p + 1, return Step2 | |
| Step 7: | Output coverage C and optimization results |
| Possible Location | Longitude/° | Latitude/° |
|---|---|---|
| 1 | 118.7191 | 32.0662 |
| 2 | 119.0066 | 32.2029 |
| 3 | 118.4501 | 32.0317 |
| 4 | 118.8749 | 31.8023 |
| 5 | 118.3416 | 31.3601 |
| Possible Location | Longitude/° | Latitude/° |
|---|---|---|
| 1 | 118.9172 | 32.0416 |
| 2 | 119.0301 | 31.3250 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, B.; Chen, X.; Han, S. Helicopter Takeoff and Landing Point Location in Cities for Emergency Services. Appl. Sci. 2022, 12, 9570. https://doi.org/10.3390/app12199570
Hu B, Chen X, Han S. Helicopter Takeoff and Landing Point Location in Cities for Emergency Services. Applied Sciences. 2022; 12(19):9570. https://doi.org/10.3390/app12199570
Chicago/Turabian StyleHu, Bin, Xingyuan Chen, and Songchen Han. 2022. "Helicopter Takeoff and Landing Point Location in Cities for Emergency Services" Applied Sciences 12, no. 19: 9570. https://doi.org/10.3390/app12199570