1. Introduction
Distribution networks play a crucial role in national energy strategies. In order to promote the widespread grid connection of clean energy and ensure the distribution system’s safe, dependable, and cost-effective functioning, it is essential to realize the panoramic perception of the region of the low-voltage distribution station [
1].
The distribution system is responsible for providing power directly to consumers, but its complicated operational environment is prone to malfunctions. Among all power system, 80% of faults are related to the distribution network, and more than half of these faults are single-phase-to-ground faults [
2]. A line failure will have a severe impact on the transformer as well as the power supply of its downstream nodes. When a ground fault occurs close to a transformer, it could result in a transformer discharge at the neutral point, which would further cause a series of complex faults such as transformer gap breakdown, transformer tripping, and gap current transformer damage [
3]. This would eventually lead to a significant power outage in the power supply area. In order to increase the reliability of the power supply [
4] and restore the power supply as soon as possible, it is essential to swiftly locate the fault section and fix the fault [
5]. However, distribution network faults do not always have obvious characteristics. Most branch lines in the distribution network are short. Large amounts of distributed resources are being concealed in the grid at the same time [
6]. Electric vehicles are one example of a variable load [
7]. The location of distribution network faults has proven to be very difficult to determine as a result of these uncertainties and the features of distribution networks.
The main methods for determining fault location are the steady-state method, transient method, the traveling wave method, and the artificial intelligence algorithm [
8]. Among them, the steady-state method uses the amplitude and phase relationship of the power frequency voltage and current in the steady state to judge a fault after it occurs [
9]. Reference [
10] established the zero-sequence impedance model of the distribution network to locate the fault interval according to the zero-sequence fault current characteristics at the nodes. Reference [
11] assumed that the fault resistance is purely resistive and does not consume reactive power, and established a quadratic equation with the fault distance as the unknown variable for the location of different fault types. The transient method extracts the zero-sequence current, power, and other features of the fundamental wave or harmonics by means of signal processing technology. Reference [
12] proposes a ground fault discrimination method in low-current grounding systems by comparing the relationship between the magnitude and phase angle of the zero-sequence current at the fault outlet and the neutral point in the fault zero-sequence equivalent network. Reference [
13] judges the fault location according to the appearance of the first peak value of current and voltage, but does not mention the application effect in a three-phase network. The distribution network’s high density of branches and short lines makes it challenging for the traveling wave method to be effectively applicable [
14]. Reference [
15], based on the double-terminal traveling wave principle, proposed the fault branch judgment principle of three-terminal and multi-terminal transmission lines to accurately determine branch line faults, T-node faults, and line faults between T-nodes. Reference [
16] analyzed the particularity of the fault traveling wave signal in the distribution network on the basis of Reference [
14], who established a fault branch search matrix based on the arrival time of the multi-terminal initial traveling wave, and compares the changes of the matrix elements before and after the fault to locate the fault section. Reference [
17] simulated the injection of DC pulse signals for positioning after the line is disconnected from the grid. These methods are not subject to factors such as operation mode, fault type, and current sensor saturation, but conditions such as high-speed sampling systems need to be taken into account. In most cases, the effect of fault type and distributed generation (DG) does not need to be considered. The artificial intelligence algorithm, such as that suggested in Reference [
18], needs a lot of training data to finish learning the eigenvalues. Nevertheless, there are not enough training data or training samples, so the algorithm will end up in an optimal local situation [
19]. Reference [
20] introduces a method of using CNN to analyze the bus voltage measurement for fault location in a targeted manner, and it can ensure a certain fault section location ability when some bus voltage data are missing.
In the distribution network, intelligent terminals should be logically configured to minimize the negative effects of faults [
21], as they can provide high-precision node voltage, current amplitude, and phase angle measurement information in real-time and synchronously for the convenience of distribution network fault location [
22,
23]. Reference [
24] proposed a fault location algorithm utilizing intelligent terminals without using line parameters, but it does not apply to small current ground faults. Reference [
25] modeled the fault node using the equivalent injection current method, but its accuracy is constrained by the equivalent model of distributed power. Reference [
26] calculated the voltage index
and performed the measurement
at the relay point. By comparing the magnitudes of
and
, it can know whether the fault is located before or after the intersection point.
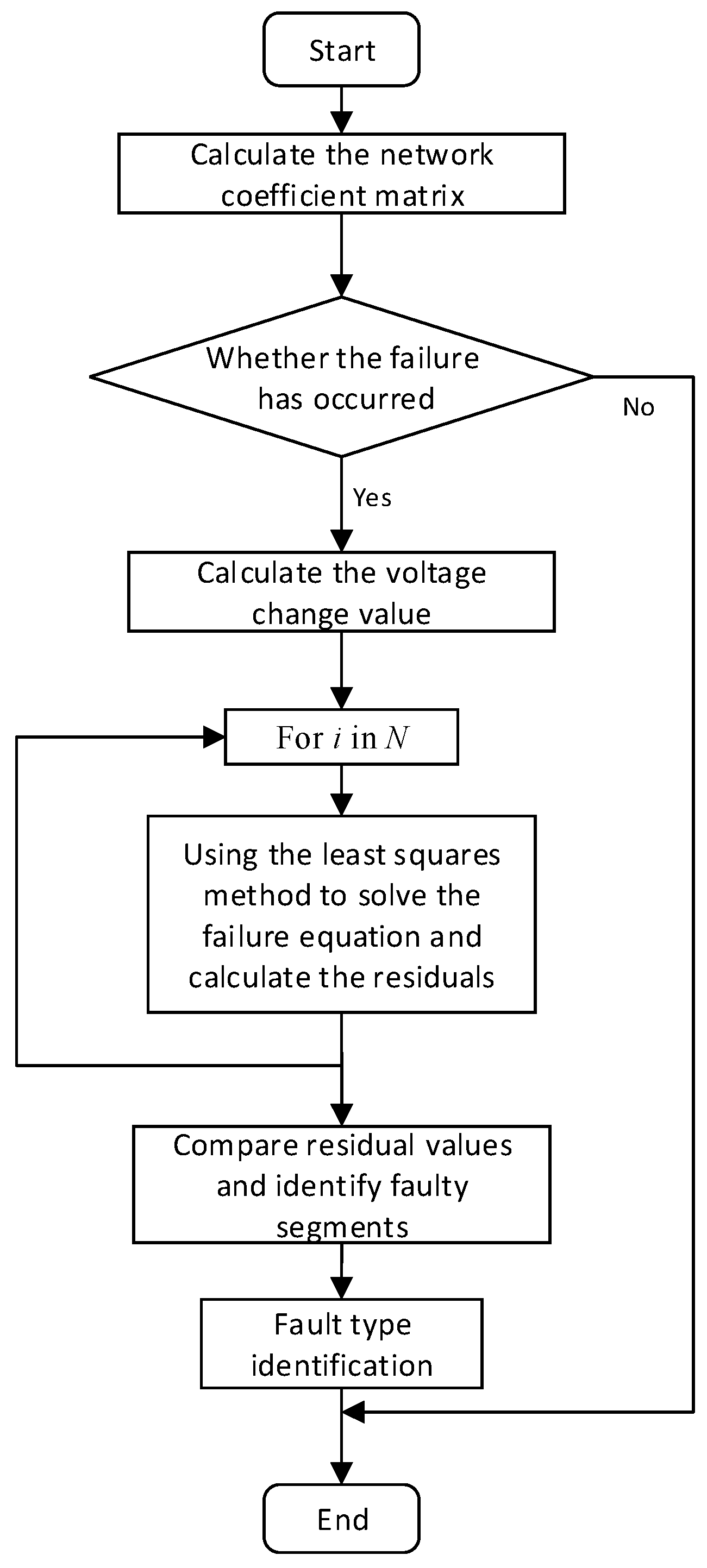
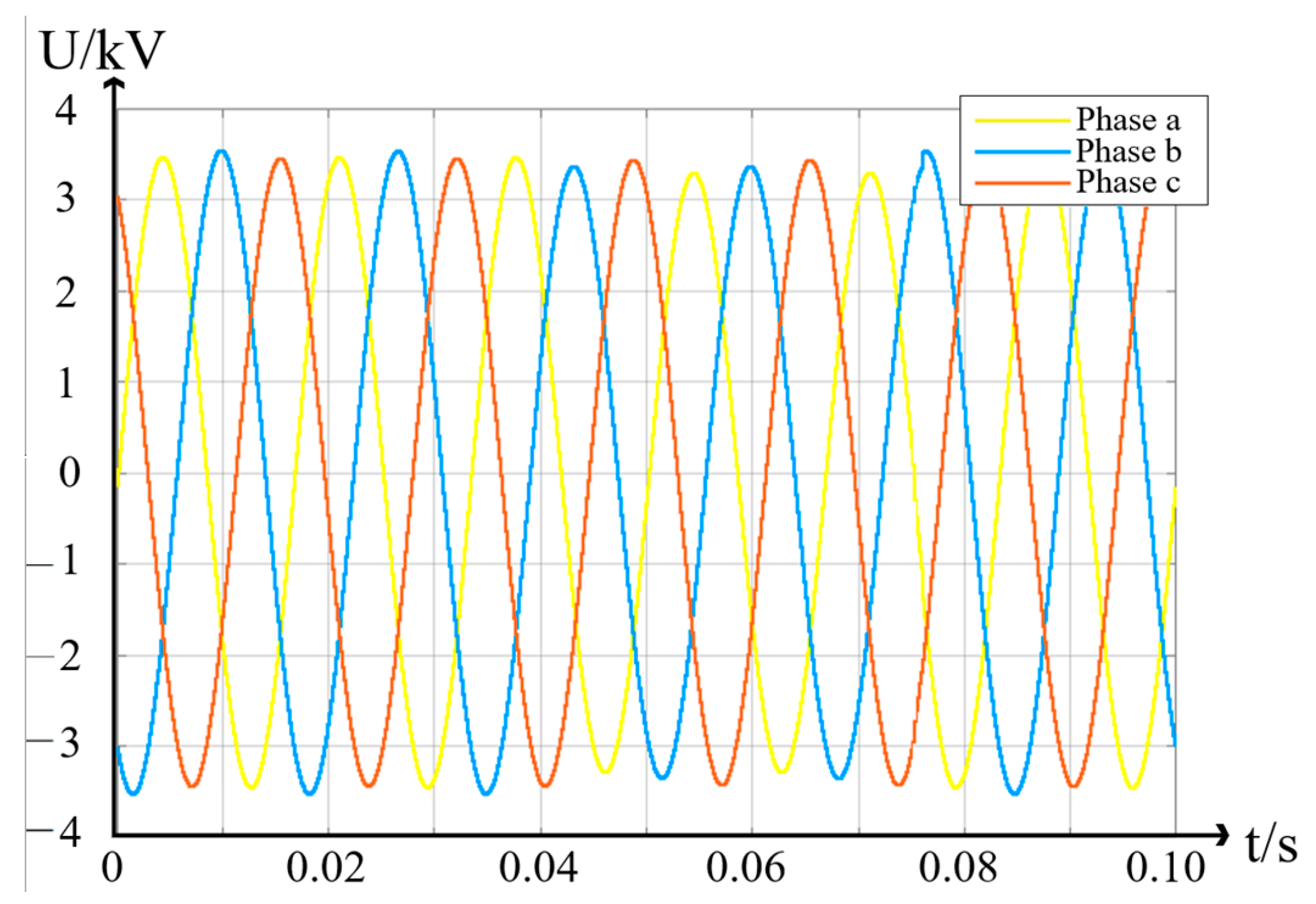
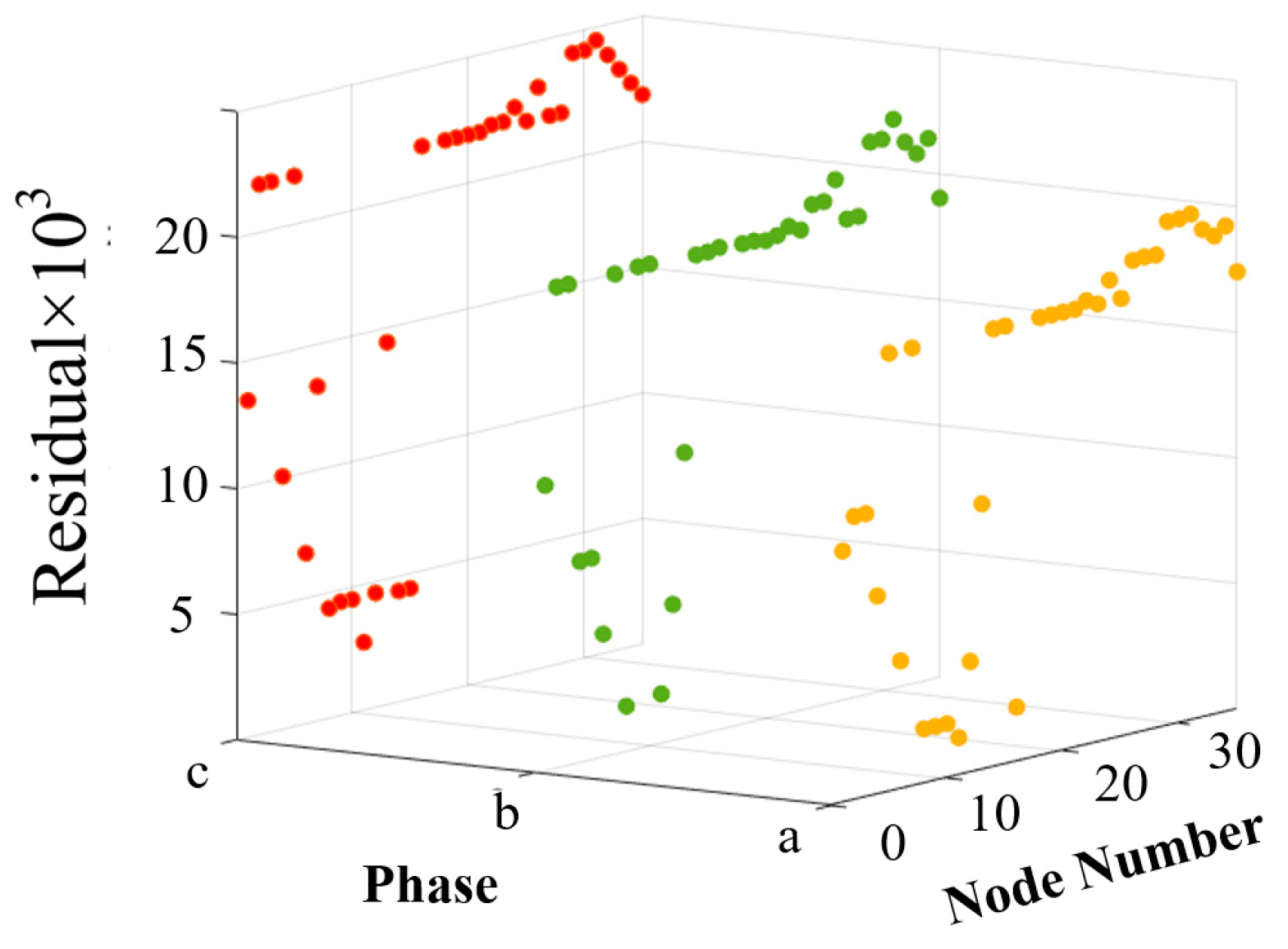
In general, the massive branches and short lines of a distribution network, along with its own fault characteristics, are constraints on its ability to quickly locate the fault section. In light of the aforementioned issues, this paper analyzes the distribution network state observability and optimizes the configuration of intelligent terminals by performing compatibility processing on the time asynchrony of measurement data brought on by the diversity of equipment. On this foundation, a distribution system short-circuit fault equivalent model was developed. The virtual fault state variables are solved based on the sparse measurement data from meters installed in the feeder and distribution power supply area. The linear least squares residuals are then compared to locate the fault section. Finally, the trend of the three-phase line voltage change in the fault section is used to determine the fault phase.
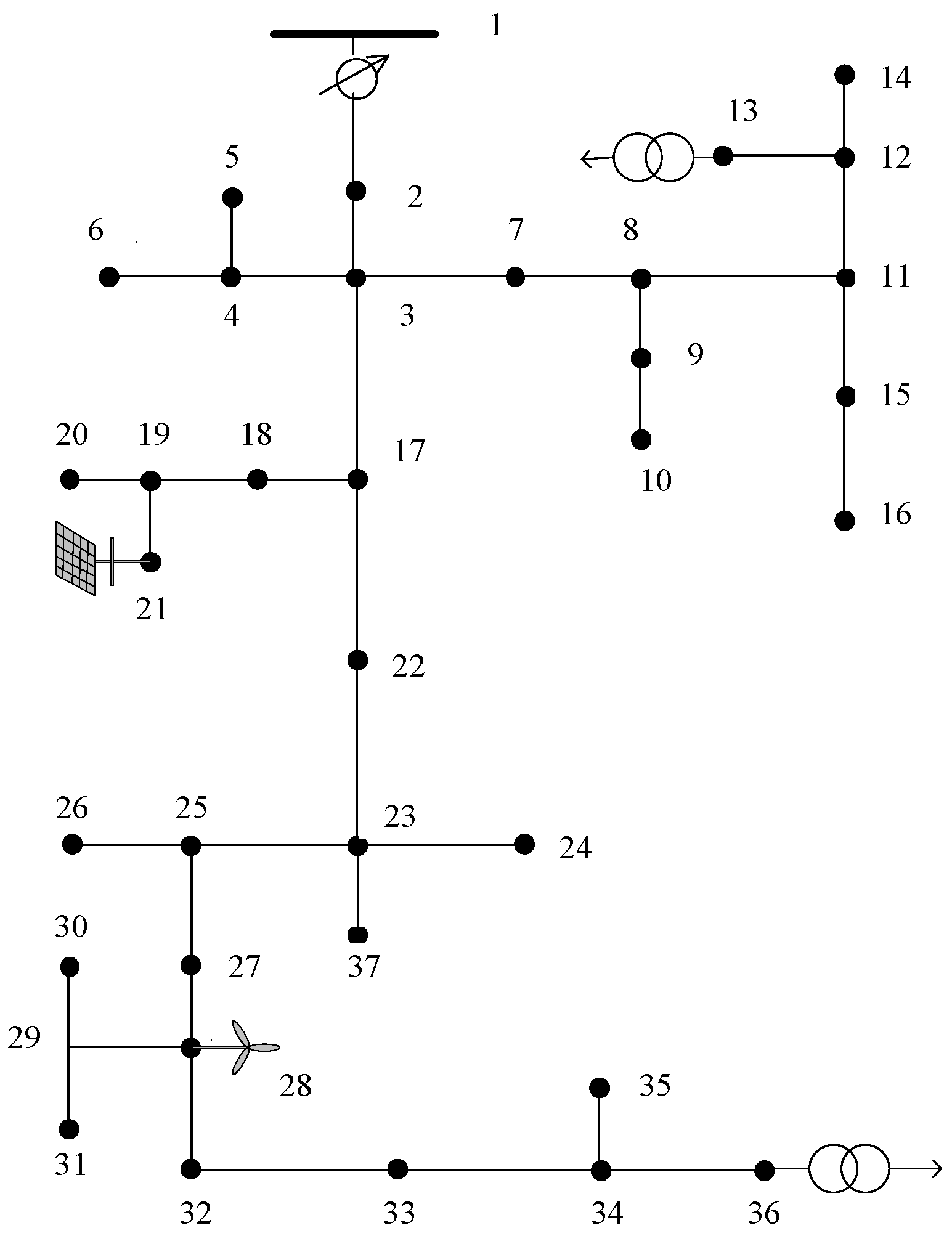
In order to verify the effect of the algorithm in the actual scene, we tested it on the improved IEEE-37 node system and IEEE-123 node system. According to the test results, we draw the following conclusions:
The algorithm used in this paper is relatively simple to use. Additionally, the algorithm has a higher fault location accuracy in high-permeability distribution networks;
The algorithm has a high utilization rate of measurement data, reduces the number of intelligent terminals, and has higher economic efficiency;
The algorithm can discriminate different types of fault categories with high accuracy.
The content of this paper is organized as follows:
Section 2 introduces the use of multiple types of intelligent terminals for the observation analysis of distribution network fault states.
Section 3 introduces the fault location algorithm for a three-phase unbalanced distribution network.
Section 4 verifies the feasibility of the algorithm by using an improved example of IEEE-37 node distribution network.
Section 5 concludes this paper.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}