
Mechanical Model and Seismic Response Analysis of a Track Type Combined Isolation Device


Abstract
:1. Introduction
2. Negative-Stiffness Device and Its Mechanical Model
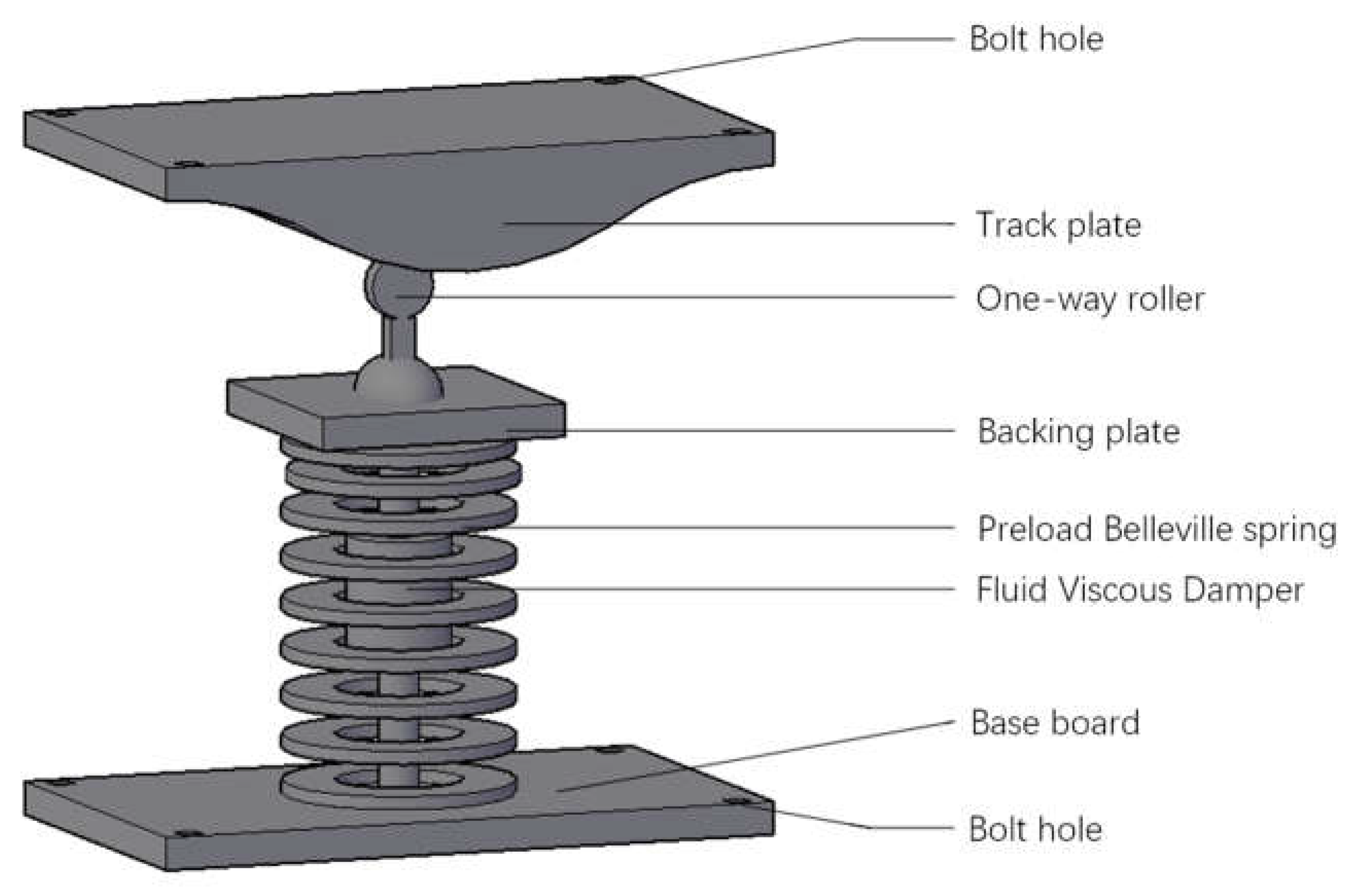
2.1. Negative-Stiffness Device
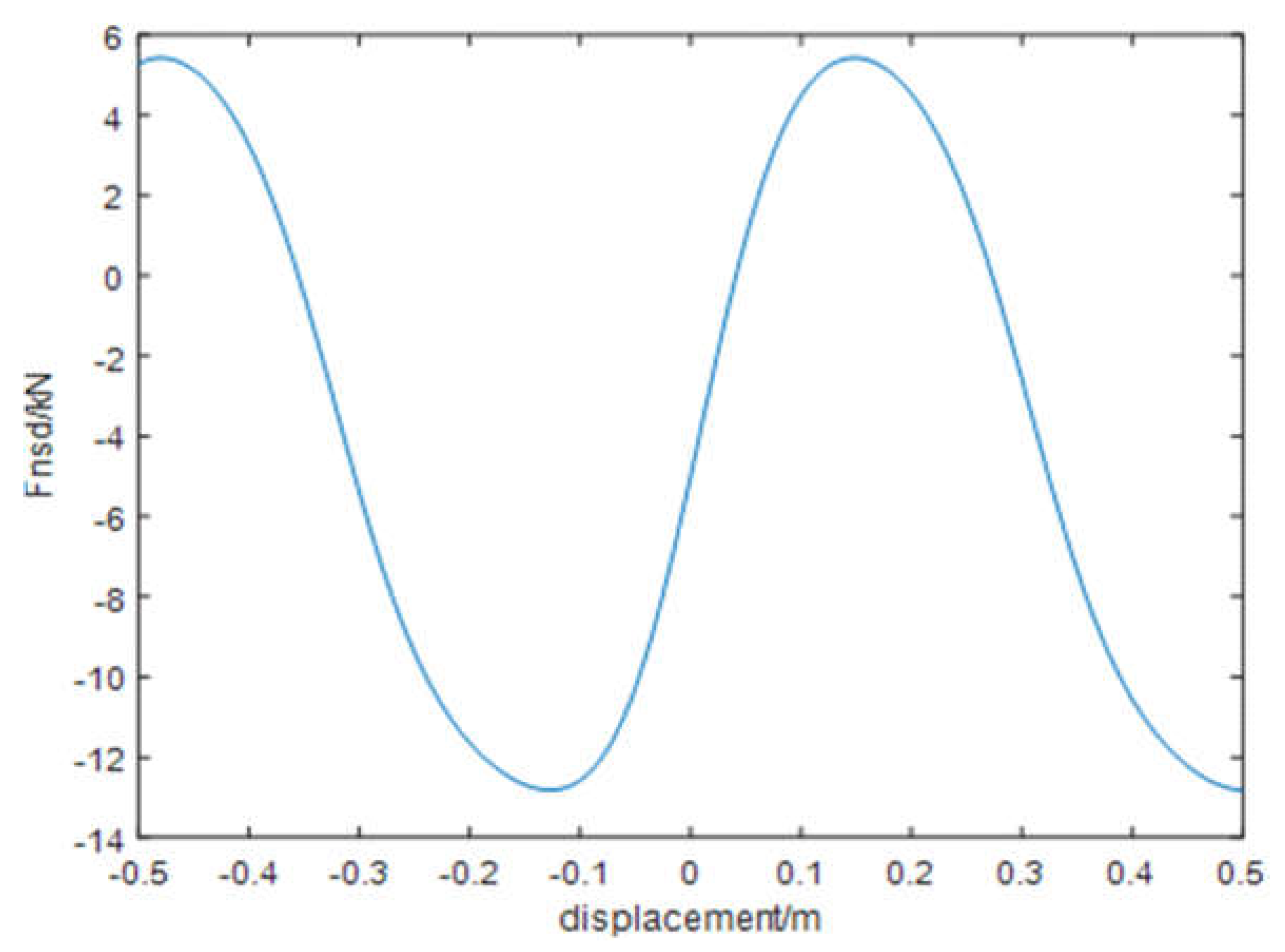
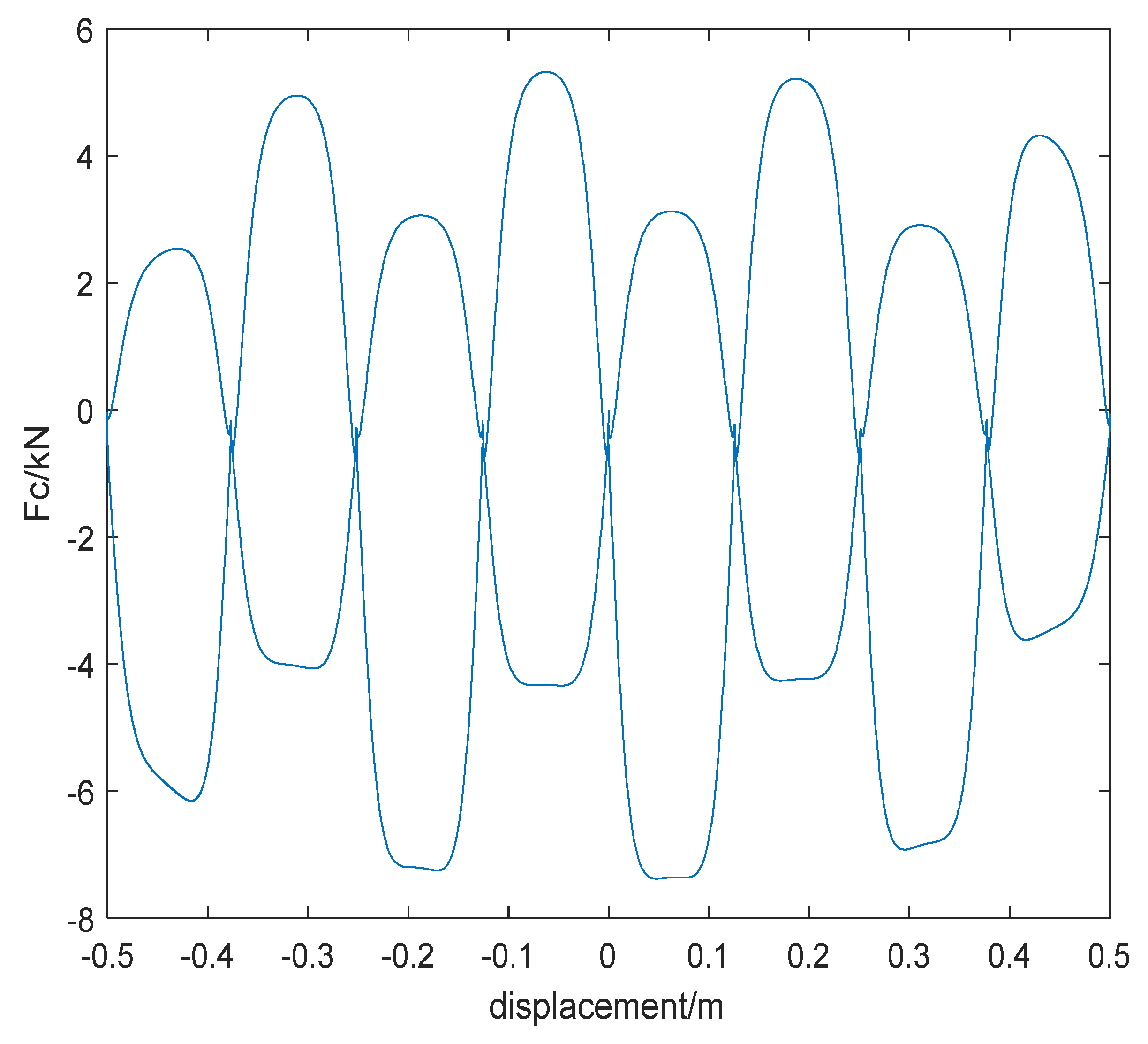
2.2. Mechanical Model
2.3. Parameter Impact Analysis
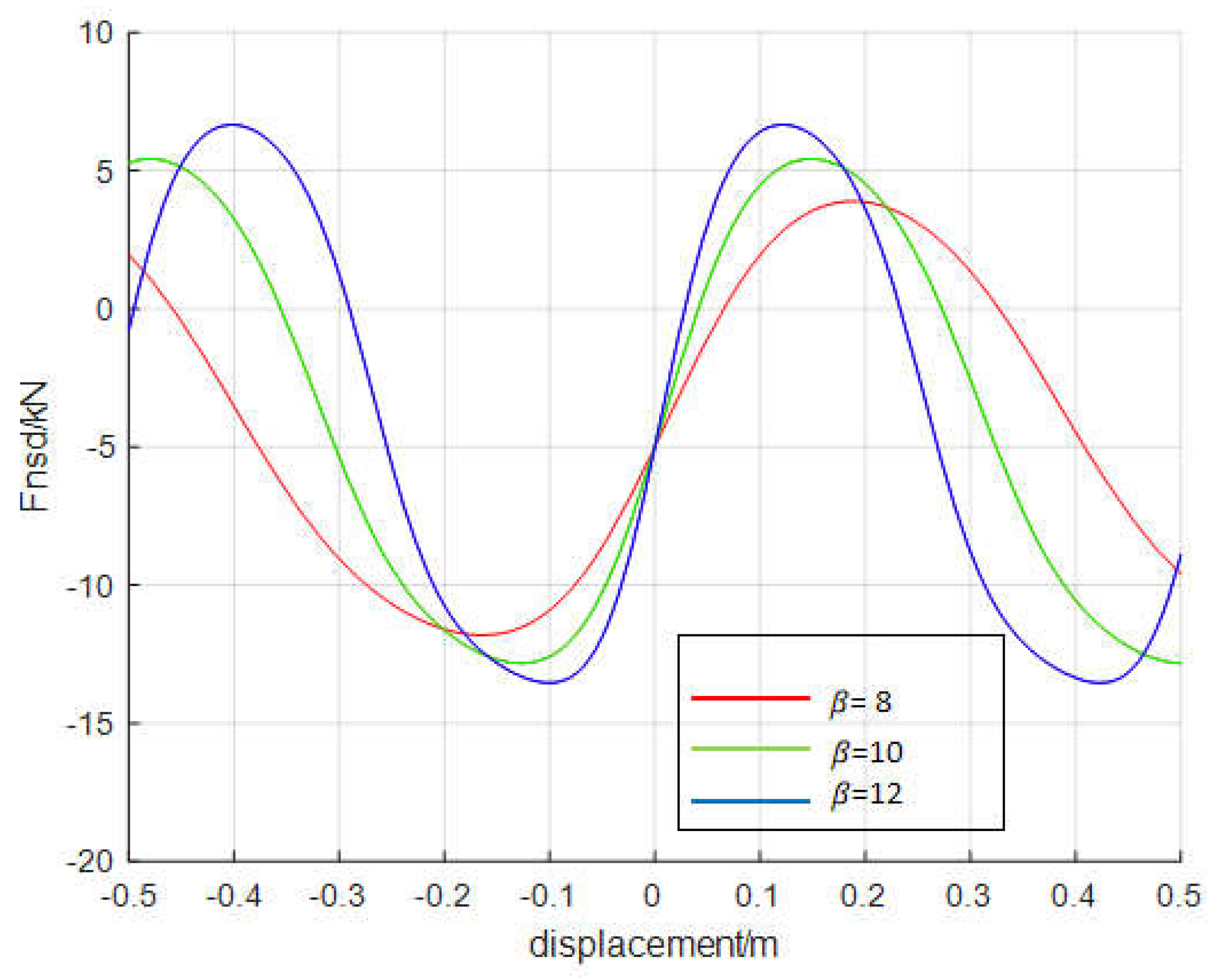
2.3.1. Orbital Surface Function Frequency, , and Peak Value of Orbital Surface Function, , Influence on Curve
2.3.2. Effect of Spring Stiffness on Negative Stiffness
2.3.3. Influence of Preload of Belleville Spring on Negative Stiffness
2.3.4. Influence of Friction Coefficient, , of Track Surface on Negative Stiffness
2.4. Parameter Design Method of Negative-Stiffness Device
3. Negative-Stiffness Isolation System and Isolation Principle
4. Seismic Response Analysis of Isolated Structure Considering Negative Stiffness
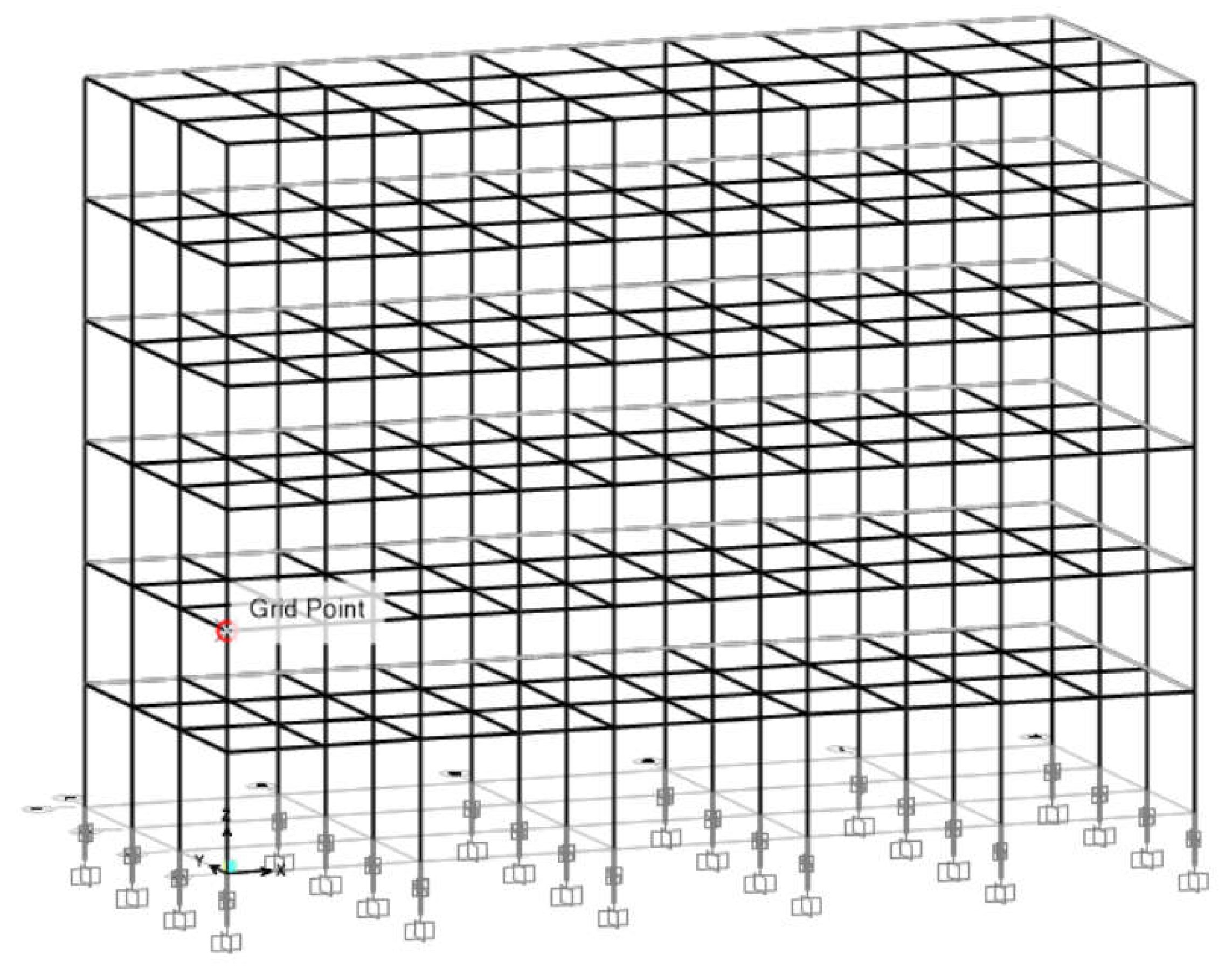
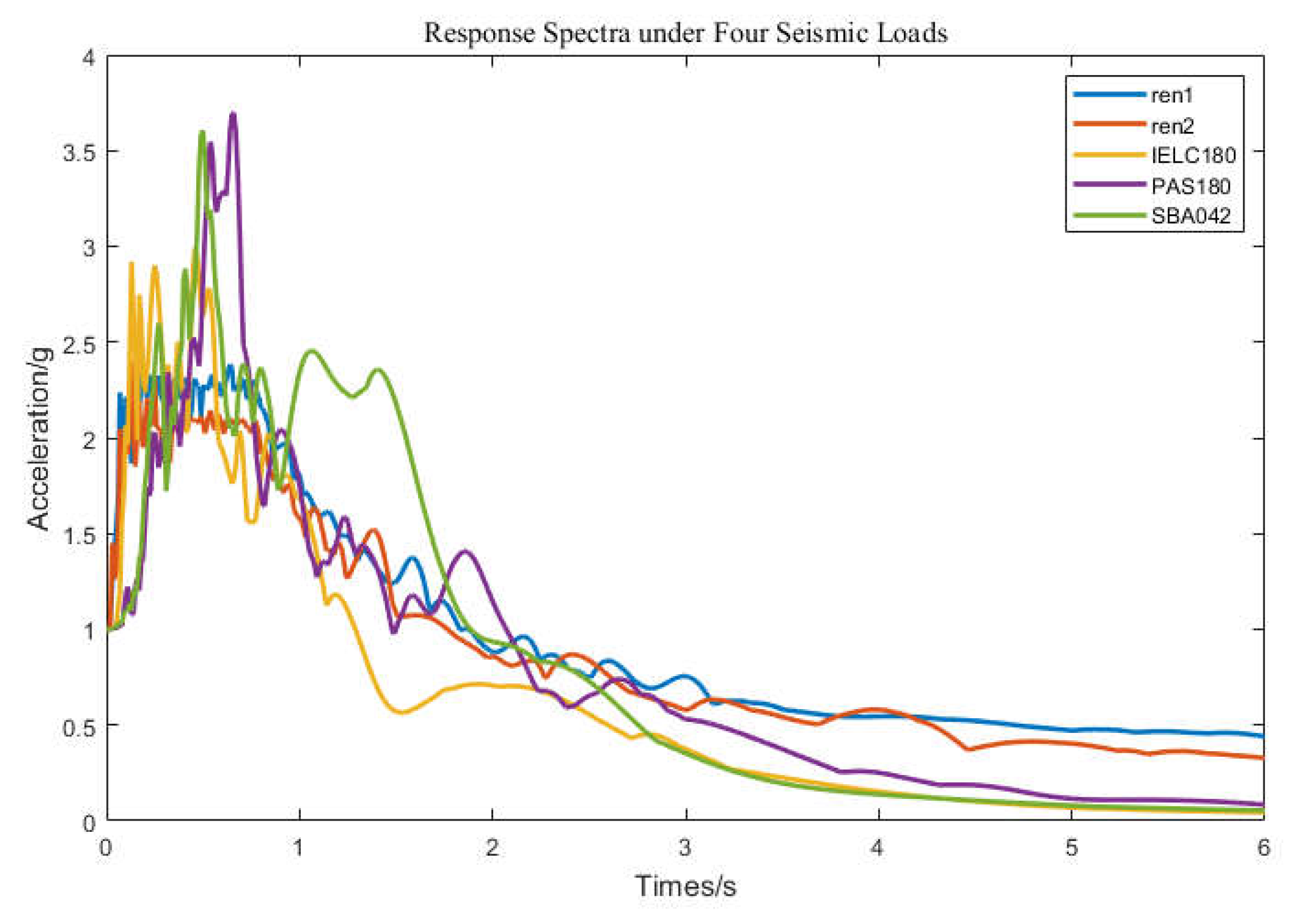
4.1. Building Model
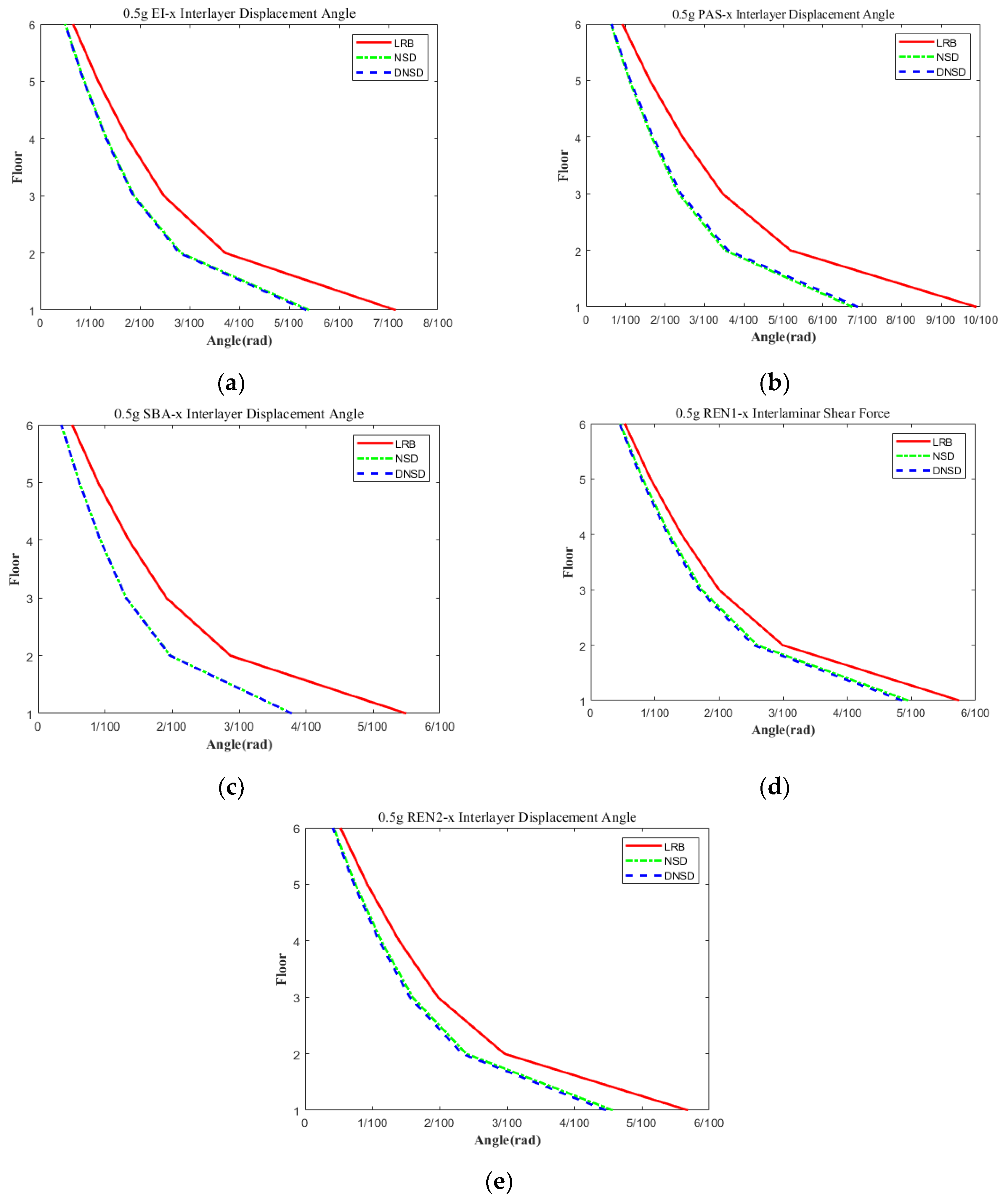
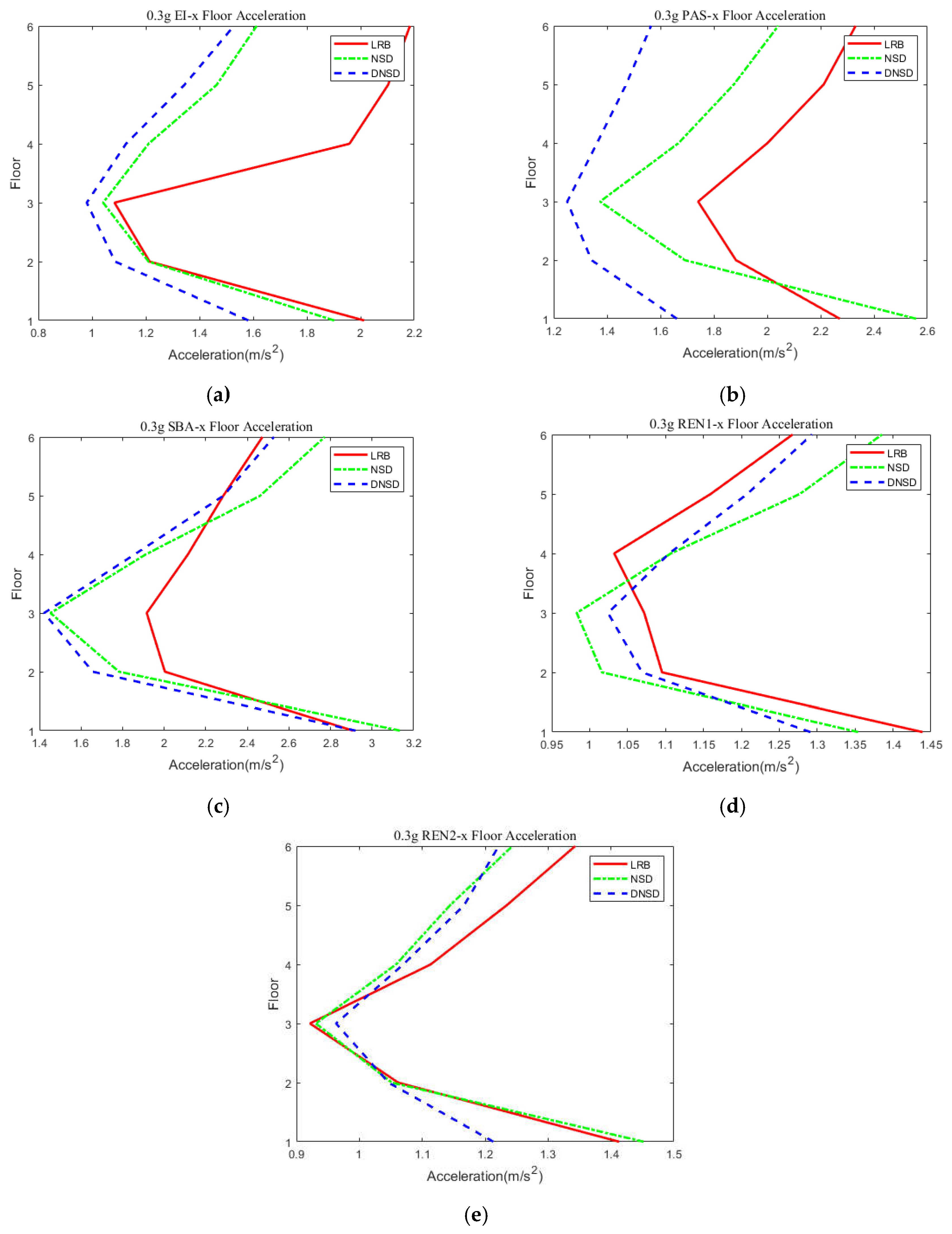
4.2. Seismic Response
5. Conclusions
- (1)
- A negative-stiffness device composed of preloaded Belleville spring, guide sleeve, one-way roller, track surface, and viscous damper was proposed. The device uses a preloaded Belleville spring and track surface to provide a restoring force consistent with the direction of displacement, so as to realize the negative-stiffness effect. Additional damping enhances the energy dissipation capacity of the device and controls the displacement of the isolation layer, so as to reduce the displacement response of the isolation layer and the ground motion response of the superstructure at the same time.
- (2)
- The mechanical model of the negative-stiffness device was established, and the influence of various parameters on the mechanical model of the negative-stiffness device was analyzed.
- (3)
- The time history analysis results show that, under all working conditions, the acceleration response of NSD relative to LRB decreases by 3.17% on average, and the displacement response of the isolation layer increases by 5.50%. Under all working conditions, the acceleration response of DNSD relative to LRB decreases by 13.73% on average, and the displacement response of the isolation layer decreases by 10.89% on average. Under all working conditions, the isolation effect of NSD and DNSD is superior to that of LRB model, and the greater the peak value of input seismic wave, the more obvious the isolation effect is. It does not only realize the effective isolation of long-period structures but also improves the disadvantages of the previous negative-stiffness devices, such as their complex structure and residual deformation. Under the action of load, the device has good deformation capacity and can maintain stable small stiffness change, thus further ensuring the stability and reliability of the combined use of isolation bearings.
- (4)
- In this paper, the track surface function was studied only as the cosine function, but in fact, there are countless kinds of track surface functions that meet the boundary conditions in theory. How to adjust the track surface function to make the isolation performance better is still a problem that needs to be solved by a lot of research. At the same time, the track surface can be made into a functional surface in both and directions, so that the building has good seismic isolation performance in different directions.
- (5)
- In the future, the negative-stiffness model device will be designed and manufactured, and the mechanical model of the device will be obtained through the static mechanical performance test, which is compared with the theoretical analysis results; and the dynamic test research of the negative-stiffness isolation device and isolation system will be further carried out.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Attary, N.; Symans, M.; Nagarajaiah, S.; Reinhorn, A.M.; Constantinou, M.C.; Taylor, D.; Sarlis, A.A.; Pasala, D.T.R. Negative Stiffness Device for Seismic Protection of Structures. J. Struct. Eng. 2013, 139, 1112–1123. [Google Scholar]
- Iemura, H.; Pradono, M.H. Passive and Semi-active Seismic Response Control of a Cable-stayed Bridge. J. Struct. Control 2002, 9, 189–204. [Google Scholar] [CrossRef]
- Iemura, H.; Igarashi, A.; Pradono, M.H.; Kalantari, A. Negative stiffness friction damping for seismically isolated structures. Struct. Control Health Monit. 2006, 13, 775–791. [Google Scholar] [CrossRef]
- Iemura, H.; Pradono, M.H. Application of Pseudo-negative Stiffness Control to the Benchmark Cable-stayed Bridge. J. Struct. Control 2003, 10, 187–203. [Google Scholar] [CrossRef]
- Attary, N.; Symans, M.; Nagarajaiah, S.; Reinhorn, A.M.; Constantinou, M.C.; Sarlis, A.A.; Pasala, D.T.R.; Taylor, D. Numerical simulations of a highway bridge structure employing passive negative stiffness device for seismic protection. Earthq. Eng. Struct. Dyn. 2015, 44, 973–995. [Google Scholar] [CrossRef]
- Yang, Q.; Ran, M.; He, W.; Yu, W.; Liu, W. Study on seismic response of isolated structure based on damping negative stiffness device. J. Vib. Eng. 2018, 31, 920–929. (In Chinese) [Google Scholar]
- Ji, H.; Xiong, S.; Yuan, Y.; Fu, J. Theoretical analysis of structural damping effect based on the principle of negative stiffness. J. Vib. Shock. 2010, 29, 91–94+206–207. (In Chinese) [Google Scholar]
- Li, X.; He, Y.; Lu, W.; Zhang, R. Mechanical Properties and Application of a Combined Sliding lsolation System. Struct. Eng. 2018, 34, 63–69. [Google Scholar] [CrossRef]
- Sun, T.; Li, H.N.; Lai, Z.L.; Nagarajaiah, S. Study on structural vibration control using curve-based negative stiffness device. J. Vib. Eng. 2017, 30, 449–456. (In Chinese) [Google Scholar]
- Vaiana, N.; Rosati, L. Classification and unified phenomenological modeling of complex uniaxial rate-independent hysteretic responses. Mech. Syst. Signal Process. 2023, 182, 109539. [Google Scholar] [CrossRef]
- CSI Analysis Reference Manual; Computers and Structures, Inc.: Berkeley, CA, USA, 2004.
- He, W.; Liu, M.; Xu, H.; Liu, W.; Feng, D. Study on mechanical performance and seismic response of high-static-low-dynamic stiffness three-dimensional isolation system. China Civ. Eng. J. 2020, 53, 41–51. (In Chinese) [Google Scholar]
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. An accurate and computationally efficient uniaxial phenomenological model for steel and fiber reinforced elastomeric bearings. Compos. Struct. 2019, 211, 196–212. [Google Scholar] [CrossRef]
- Haringx, J.A. I. Philips Research Report 3. In On Highly Compressive Helical Springs and Rubber Rods and Their Applications for Vibration-Free Mountings; Philips Research Laboratories: Eindhoven, The Netherlands, 1948; pp. 401–449. [Google Scholar]
- Haringx, J.A. II. Philips Research Report 3. In On Highly Compressive Helical Springs and Rubber Rods and Their Applications for Vibration-Free Mountings; Philips Research Laboratories: Eindhoven, The Netherlands, 1949; pp. 49–80. [Google Scholar]
- Liu, T.; Zhang, Q.; Liu, W.; Yue, S. Mechanical model and seismic response analysis of an adaptive variable stiffness seismic isolation device. J. Vib. Eng. 2021, 40, 53–61, 74. (In Chinese) [Google Scholar]
- Liu, W.; Yang, Q.; Zhou, F.; Feng, D. Nonlinear elastic rotation and shear property theoretical and experimental research of rubber isolators. Earthq. Eng. Eng. Dyn. 2004, 24, 172–179. (In Chinese) [Google Scholar]
- Code for Seismic Design of Buildings (GB 50011-2010); National Standard of the People’s Republic of China; China Architecture & Building Press: Beijing, China, 2016. (In Chinese)
- Liu, W.; Yu, X.; Xu, H.; Zhu, H. Seismic response of high-rise isolated building based on negative stiffness device wit damping. J. Build. Struct. 2020, 41, 36–44. (In Chinese) [Google Scholar]
- Song, R.; Song, X.; Tian, J. Mechanical and performance analysis of vertical variable stiffness isolation bearing. Archit. Sci. 2022, 38, 25–33. (In Chinese) [Google Scholar]
- Chen, J. Principle of FNA method for fast nonlinear analysis of isolated structures. Encycl. Forum Electron. J. 2020, 8, 1644–1645. (In Chinese) [Google Scholar]
- Sun, T. Theoretical and Experimental Studies on Vibration Control System with Negative Stiffness Device; Dalian University of Technology: Dalian, China, 2017. (In Chinese) [Google Scholar]
- Gong, S. Shaking Table Test Study on Smart Isolation System of Negative Stiffness; Huazhong University of Science and Technology: Wuhan, China, 2016. (In Chinese) [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Effective Diameter | Total Rubber Thickness | Strength Before Yield | Equivalent Stiffness | Vertical Stiffness | Yield Force | |
|---|---|---|---|---|---|---|---|
| 100% Horizontal Shear Deformation | 250% Horizontal Shear Deformation | ||||||
| (mm) | (mm) | kN/m | kN/m | kN/m | kN/mm | kN | |
| LRB400 | 400 | 73 | 8790 | 1040 | 820 | 2200 | 27.0 |
| LRB500 | 500 | 92 | 10,910 | 1270 | 1010 | 2400 | 40.0 |
| LRB600 | 600 | 110 | 13,110 | 1580 | 1580 | 2800 | 63.0 |
| Earthquake Name | Recording Station | PGA/g |
|---|---|---|
| Imperial Valley-02 | El Centro Array #9 | 0.839 |
| Kern County | Pasadena—CIT Athenaeum | 0.176 |
| Kern County | Santa Barbara Courthouse | 0.322 |
| REN1 | —— | 0.200 |
| REN2 | —— | 0.200 |
| Seismic Wave | Peak Value of Seismic Wave | Maximum Floor Acc (m/s2) | Acc Response Deviation Rate | Maximum Displacement of Isolation Layer (mm) | Displacement Response Deviation Rate | ||||
|---|---|---|---|---|---|---|---|---|---|
| LRB | NSD | DNSD | LRB | NSD | DNSD | ||||
| EL Centro | 0.3 g | 2.01 | 1.90 | 1.58 | −21.39% | 81 | 94 | 65 | −19.75% |
| 0.4 g | 2.70 | 2.63 | 2.27 | −15.93% | 142 | 152 | 120 | −15.49% | |
| 0.5 g | 3.19 | 2.77 | 2.68 | −15.99% | 207 | 204 | 169 | −18.36% | |
| 0.6 g | 4.27 | 3.62 | 3.13 | −26.70% | 274 | 261 | 220 | −19.71% | |
| PAS-180 | 0.3 g | 2.27 | 2.56 | 1.66 | −26.87% | 156 | 160 | 126 | −19.23% |
| 0.4 g | 3.21 | 2.96 | 2.64 | −17.76% | 226 | 226 | 200 | −11.50% | |
| 0.5 g | 4.15 | 3.42 | 2.98 | −28.19% | 297 | 289 | 261 | −12.12% | |
| 0.6 g | 4.85 | 3.61 | 3.52 | −27.42% | 366 | 347 | 318 | −13.11% | |
| SBA−042 | 0.3 g | 2.90 | 3.13 | 2.92 | 0.69% | 175 | 186 | 160 | −8.57% |
| 0.4 g | 3.85 | 3.82 | 3.43 | −10.91% | 258 | 266 | 237 | −8.14% | |
| 0.5 g | 4.71 | 4.48 | 4.07 | −13.59% | 344 | 339 | 308 | −10.47% | |
| 0.6 g | 5.46 | 5.04 | 4.75 | −13.00% | 429 | 409 | 375 | −12.59% | |
| REN1 | 0.3 g | 1.43 | 1.35 | 1.29 | −9.79% | 81 | 86 | 75 | −7.41% |
| 0.4 g | 1.71 | 1.80 | 1.67 | −2.34% | 118 | 132 | 114 | −3.39% | |
| 0.5 g | 2.11 | 2.53 | 2.07 | −1.90% | 156 | 176 | 157 | 0.64% | |
| 0.6 g | 2.74 | 2.90 | 2.87 | 4.74% | 198 | 243 | 189 | −4.55% | |
| REN2 | 0.3 g | 1.41 | 1.45 | 1.21 | −14.18% | 69 | 72 | 64 | −7.25% |
| 0.4 g | 1.80 | 1.90 | 1.73 | −3.89% | 99 | 107 | 94 | −5.05% | |
| 0.5 g | 2.61 | 2.44 | 2.31 | −11.49% | 142 | 160 | 127 | −10.56% | |
| 0.6 g | 3.28 | 2.93 | 2.67 | −18.60% | 189 | 220 | 168 | −11.11% | |
| Average response | −13.73% | −10.89% | |||||||
| Seismic Wave | Peak Value of Seismic Wave | Maximum Floor Acc (m/s2) | Acc Response Deviation Rate | Maximum Displacement of Isolation Layer (mm) | Displacement Response Deviation Rate | ||||
|---|---|---|---|---|---|---|---|---|---|
| LRB | NSD | DNSD | LRB | NSD | DNSD | ||||
| EL Centro | 0.3 g | 2.01 | 1.90 | 1.58 | −5.47% | 81 | 94 | 65 | 16.05% |
| 0.4 g | 2.70 | 2.63 | 2.27 | −2.59% | 142 | 152 | 120 | 7.04% | |
| 0.5 g | 3.19 | 2.77 | 2.68 | −13.17% | 207 | 204 | 169 | −1.45% | |
| 0.6 g | 4.27 | 3.62 | 3.13 | −15.22% | 274 | 261 | 220 | −4.74% | |
| PAS-180 | 0.3 g | 2.27 | 2.56 | 1.66 | 12.78% | 156 | 160 | 126 | 2.56% |
| 0.4 g | 3.21 | 2.96 | 2.64 | −7.79% | 226 | 226 | 200 | 0.00% | |
| 0.5 g | 4.15 | 3.42 | 2.98 | −17.59% | 297 | 289 | 261 | −2.69% | |
| 0.6 g | 4.85 | 3.61 | 3.52 | −25.57% | 366 | 347 | 318 | −5.19% | |
| SBA-042 | 0.3 g | 2.90 | 3.13 | 2.92 | 7.93% | 175 | 186 | 160 | 6.29% |
| 0.4 g | 3.85 | 3.82 | 3.43 | −0.78% | 258 | 266 | 237 | 3.10% | |
| 0.5 g | 4.71 | 4.48 | 4.07 | −4.88% | 344 | 339 | 308 | −1.45% | |
| 0.6 g | 5.46 | 5.04 | 4.75 | −7.69% | 429 | 409 | 375 | −4.66% | |
| REN1 | 0.3 g | 1.43 | 1.35 | 1.29 | −5.59% | 81 | 86 | 75 | 6.17% |
| 0.4 g | 1.71 | 1.80 | 1.67 | 5.26% | 118 | 132 | 114 | 11.86% | |
| 0.5 g | 2.11 | 2.53 | 2.07 | 19.91% | 156 | 176 | 157 | 12.82% | |
| 0.6 g | 2.74 | 2.90 | 2.87 | 5.84% | 198 | 243 | 189 | 22.73% | |
| REN2 | 0.3 g | 1.41 | 1.45 | 1.21 | 2.84% | 69 | 72 | 64 | 4.35% |
| 0.4 g | 1.80 | 1.90 | 1.73 | 5.56% | 99 | 107 | 94 | 8.08% | |
| 0.5 g | 2.61 | 2.44 | 2.31 | −6.51% | 142 | 160 | 127 | 12.68% | |
| 0.6 g | 3.28 | 2.93 | 2.67 | −10.67% | 189 | 220 | 168 | 16.40% | |
| Average response | −3.17% | 5.50% | |||||||
| Seismic Wave | Peak Value of Seismic Wave | Maximum Floor Acc(m/s2) | Acc Response Deviation Rate | Maximum Displacement of Isolation Layer (mm) | Displacement Response Deviation Rate | ||||
|---|---|---|---|---|---|---|---|---|---|
| LRB | NSD | DNSD | LRB | NSD | DNSD | ||||
| EL Centro | 0.3 g | 2.01 | 1.90 | 1.58 | −16.84% | 81 | 94 | 65 | −30.85% |
| 0.4 g | 2.70 | 2.63 | 2.27 | −13.69% | 142 | 152 | 120 | −21.05% | |
| 0.5 g | 3.19 | 2.77 | 2.68 | −3.25% | 207 | 204 | 169 | −17.16% | |
| 0.6 g | 4.27 | 3.62 | 3.13 | −13.54% | 274 | 261 | 220 | −15.71% | |
| PAS-180 | 0.3 g | 2.27 | 2.56 | 1.66 | −35.16% | 156 | 160 | 126 | −21.25% |
| 0.4 g | 3.21 | 2.96 | 2.64 | −10.81% | 226 | 226 | 200 | −11.50% | |
| 0.5 g | 4.15 | 3.42 | 2.98 | −12.87% | 297 | 289 | 261 | −9.69% | |
| 0.6 g | 4.85 | 3.61 | 3.52 | −2.49% | 366 | 347 | 318 | −8.36% | |
| SBA-042 | 0.3 g | 2.90 | 3.13 | 2.92 | −6.71% | 175 | 186 | 160 | −13.98% |
| 0.4 g | 3.85 | 3.82 | 3.43 | −10.21% | 258 | 266 | 237 | −10.90% | |
| 0.5 g | 4.71 | 4.48 | 4.07 | −9.15% | 344 | 339 | 308 | −9.14% | |
| 0.6 g | 5.46 | 5.04 | 4.75 | −5.75% | 429 | 409 | 375 | −8.31% | |
| REN1 | 0.3 g | 1.43 | 1.35 | 1.29 | −4.44% | 81 | 86 | 75 | −12.79% |
| 0.4 g | 1.71 | 1.80 | 1.67 | −7.22% | 118 | 132 | 114 | −13.64% | |
| 0.5 g | 2.11 | 2.53 | 2.07 | −18.18% | 156 | 176 | 157 | −10.80% | |
| 0.6 g | 2.74 | 2.90 | 2.87 | −1.03% | 198 | 243 | 189 | −22.22% | |
| REN2 | 0.3 g | 1.41 | 1.45 | 1.21 | −16.55% | 69 | 72 | 64 | −11.11% |
| 0.4 g | 1.80 | 1.90 | 1.73 | −8.95% | 99 | 107 | 94 | −12.15% | |
| 0.5 g | 2.61 | 2.44 | 2.31 | −5.33% | 142 | 160 | 127 | −20.63% | |
| 0.6 g | 3.28 | 2.93 | 2.67 | −8.87% | 189 | 220 | 168 | −23.64% | |
| Average response | −10.55% | −15.24% | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, G.; Wang, Z.; Yang, Y. Mechanical Model and Seismic Response Analysis of a Track Type Combined Isolation Device. Appl. Sci. 2022, 12, 8794. https://doi.org/10.3390/app12178794
Kong G, Wang Z, Yang Y. Mechanical Model and Seismic Response Analysis of a Track Type Combined Isolation Device. Applied Sciences. 2022; 12(17):8794. https://doi.org/10.3390/app12178794
Chicago/Turabian StyleKong, Guanjie, Ziyu Wang, and Youfa Yang. 2022. "Mechanical Model and Seismic Response Analysis of a Track Type Combined Isolation Device" Applied Sciences 12, no. 17: 8794. https://doi.org/10.3390/app12178794