In actual operation, the protection system may cause equipment defects due to operational faults, environmental factors, and switching operations, etc., which affect the working performance of the equipment.
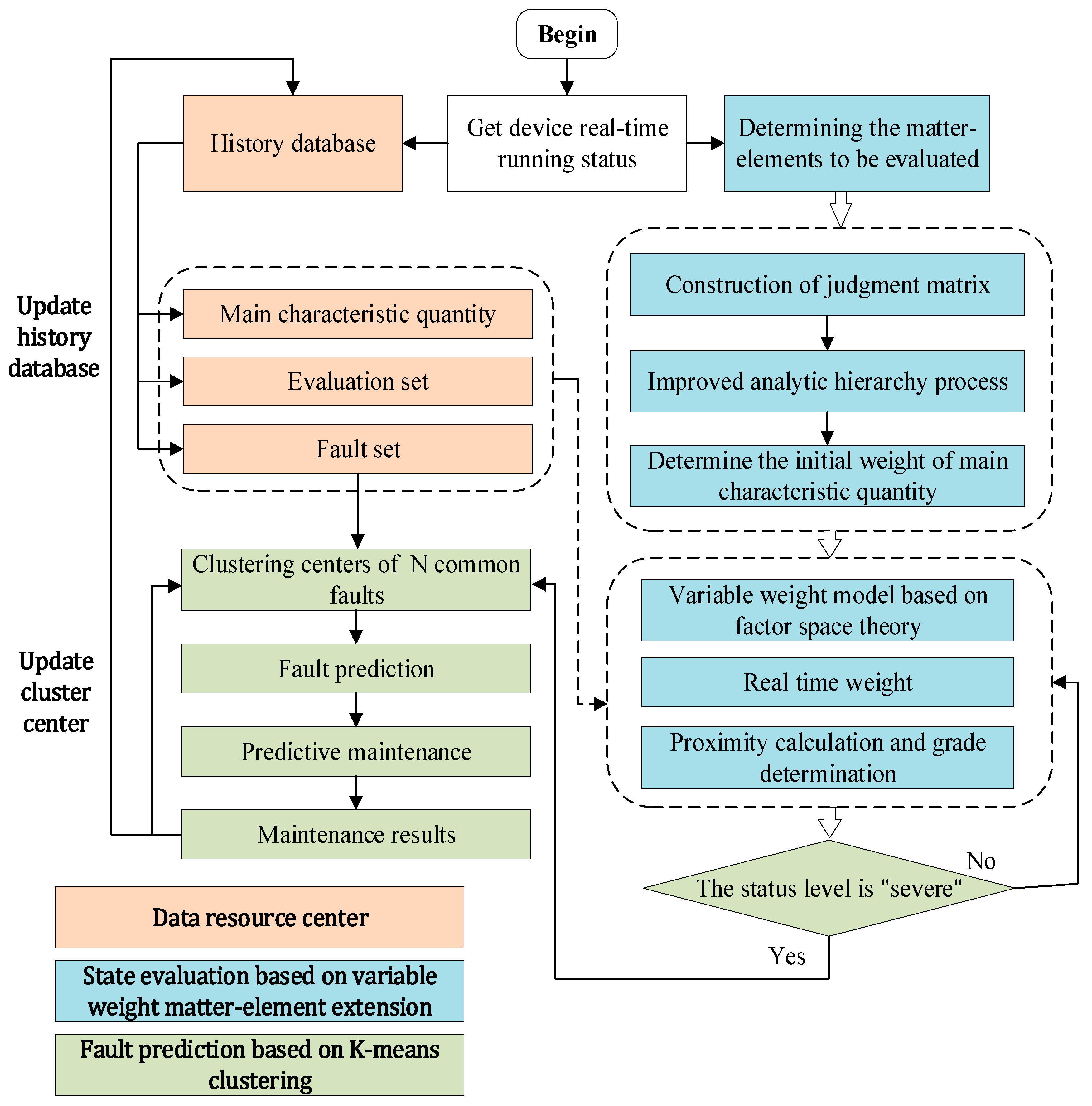
Matter-element extension method is an evaluation method used to describe things, which combines qualitative and quantitative information. Its principle is to select the characteristics of things, and quantitatively evaluate the current state of things according to the actual data of characteristic quantity indicators. The evaluation process is shown in
Figure 4. To achieve real-time evaluation of the protection system state,
Section 3.2.1 collates and selects nine characteristic quantities for protection system status evaluation, and uses their frequency of occurrence to judge the operating state of the system. A classical domain for state evaluation is proposed in
Section 3.2.2, which can classify the state of the system into “normal”, “attention”, and “severe”. Since the occurrence of each characteristic quantity has a different impact on the equipment, the nine characteristic quantities are assigned weights in
Section 3.2.3 and can be adjusted in real time according to their degradation degree. In
Section 3.2.4, the determination of the state level is achieved by calculating the relative closeness.
A matter-element is the basic unit for describing a thing. A thing
N, a characteristic
C, and a quantity
V about the characteristic
C form an ordered triplet, denoted as
. The expression of the protection system as an
n-dimensional matter-element
, which requires a comprehensive evaluation of several indicators, is
where
N is the protection system,
C is the characteristic quantity of the protection system, and
V is the range of values of the characteristic quantity.
3.2.1. State Evaluation Characteristic Quantities
In the smart substation information processing platform, the information can be divided into incident-level information, general-level information, and forecasting-level information [
25]. Among them, incident-level information such as protection activation, circuit breaker operation, etc. will directly enable fault diagnosis algorithms or start smart grid self-healing procedures once they appear, and are generally used as post-fault diagnosis and tracking algorithms. The general and forecasting level information appears more frequently and with lower priority, and is generally used only in the substation as a basis for post-fault maintenance, but the frequent occurrence of such information often indicates the tendency of deterioration of a part of the equipment. In this paper, the frequency of general and forecasting level information is used as an indicator for the state evaluation of the equipment.
In this paper, the historical operation data of a 220 kV substation protection system in the recent five years (2016–2021) are collected, including SV/GOOSE state information, bus/line sampling value information, communication channel information, online operation information, etc., as well as the protection system SOE frequent action signal records, and equipment defect processing records. Combined with the equipment instructions provided by equipment manufacturers, the abnormal operating conditions of the protection system are studied. During the operation of the protection system device, a total of five types of warning signals were recorded, with a total of 77 signals. Some warning signals will cause protection function exit or device locking, such as software setting errors, board configuration error alarms, etc. Some warning signals have a clear direction to the fault, and the fault causes can be obtained by simple reasoning in the existing knowledge base, such as equipment or plug-in power failure alarms. In order to improve the efficiency of the algorithm, the above types of characteristic quantities were not involved in the subsequent study, and only nine alarm signals that occurred relatively frequently, could characterize the equipment defective faults, and whose fault-type was difficult to determine by simple inference, were selected as characteristic quantities, as shown in
Table 2.
3.2.2. State Evaluation Joint Domain and Classical Domain
The joint domain is the total range of values of each characteristic quantity of the system to be evaluated, and the expression of the joint domain elements is
where
N is the protection system,
is the range of values of the
i-th characteristic quantity
, and
and
represent the upper and lower limits specified by the characteristic quantity
.
This paper collects and analyzes the field export data of a 220 KV smart station in China Southern Power Grid in 2019, including SV/GOOSE state information, sampling value information, communication channel information, etc., and sorts the upper and lower limits of the frequency of each characteristic in 24 h as shown in (3).
The classical domain is the numerical range of the characteristics of the system to be evaluated in this state level. The expression of classical domain matter-element is
Among them, is the j-th state level divided, is the protection system under the j-th state level, is the j-th state level, the value range specified in the i-th characteristic quantity Ci, is the upper and lower limits of the value range.
By reviewing the relay protection status evaluation guidelines issued by the State Grid Corporation and related literature, the protection system equipment status levels are generally classified as normal, attention, abnormal, and serious abnormal. However, in the actual operation of the protection system equipment, the time required for the equipment to deteriorate to failure due to abnormal operating conditions is generally short, so this paper combines “abnormal” and “serious abnormal” into a “severe” state. The classical domain is set as = {, }, where correspond to “normal”, “attention” and “severe” levels, respectively. “Normal” means the equipment is in good operation. “Attention” indicates that the equipment is operating normally but some indicators have deteriorated and may fail if no intervention is made. “Severe” means that the equipment may fail soon or is already in a state of failure, and the equipment will be subject to fault prediction and diagnosis, and targeted, preventive maintenance.
Based on the relay protection state evaluation guidelines, and combined with expert experience, manufacturer’s instructions and actual research, the classical domain of the matter-element was set. The network channel operation is used as an example to illustrate the classical domain determination method for the characteristic quantity
. The scoring criteria for channel operation in the state evaluation guidelines are shown in
Figure 5. According to the guidelines, when the channel abnormal frequency is less than one, the score is more than six points, which is a normal state. When the alarm frequency is one, the score is four to six points, and it is in the state of attention. When the alarm frequency is greater than one, the score is less than four, and the equipment is in a severe state. The GOOSE alarm frequency is expressed as follows: the classical domain of the normal state of the characteristic quantity
is [0, 0.5], the attention state is [0.5, 1.5], and the severe state is [1.5, 3].
Similarly, the classical domains of other state quantities are determined as follows based on the state quantity scoring rules of the state evaluation guidelines and expert opinions.
denotes the classical domains in the normal, attention, and severe states, respectively.
3.2.3. Characteristic Quantities Weight of State Evaluation
The occurrence of different characteristic quantities indicates that the equipment may have different fault types, and the probability of each fault type is different, and the influence on the equipment is also different. In this paper, the improved analytic hierarchy process (AHP) is used to give the initial weight to the characteristic quantity [
26].
The posterior probability in Bayesian theory can characterize the influence of the characteristic quantity on the equipment state. In Bayesian theory, the prior probability is the probability of a fault type; the conditional probability is the probability of obtaining the corresponding fault symptom information, namely the probability of characteristic quantity, under the condition that a certain fault occurs in the equipment. According to the existing characteristic quantities, the probability of the corresponding fault type is the posterior probability. Bayesian formula is
where
m is the number of faults in the fault set
F, and the fault set is detailed in
Section 3.3.1.
is the prior probability of occurrence of fault type
,
is the probability of occurrence of feature
, i.e., conditional probability, when fault type
occurs.
is the probability of fault type
when characteristic
appears, namely the posterior probability.
When
appears, the comprehensive posterior probability (CPP) of equipment failure is
. The higher the probability is, the higher the possibility of equipment failure occurring when the characteristic
occurs, and it can be considered that the influence of the characteristic
on the equipment state is greater. By referring to the relevant literature, the prior probability and conditional probability of the characteristic quantity of common faults of the protection system can be obtained [
27,
28]. Considering the prior probability of all faults and the conditional probability of the occurrence of characteristic quantities when faults occur, the comprehensive posterior probabilities of nine characteristic quantities
of the protection system faults are calculated, as shown in
Table 3.
According to the comprehensive posterior probability of characteristic quantities
of equipment failure, combined with the experience of equipment manufacturers and high voltage station operation and maintenance experts, the fuzzy complementary judgment matrix
M can be obtained by comparing the influence of each feature on the equipment state.
The element
in column
j of row
i of the matrix means the influence of the first characteristic quantities
on the device state compared with the
j-th characteristic quantities
. The meanings of the 0 to 1 scales in the matrix are shown in
Table 4.
The formula for calculating the weight of characteristic quantity by the improved AHP method is:
where
is an adjustment parameter and
n is the number of characteristic quantity. In order to avoid the large gap between the weight of each characteristic quantity, generally take
= (
n − 1)/2.
The initial weight
of each characteristic quantity is obtained as shown in
Table 5.
The AHP method is a multi-objective decision-making method combining qualitative analysis and quantitative analysis, which inevitably has subjective factors of expert experience. The improved AHP method proposed in this paper introduces complete and detailed mathematical statistics, and uses the posterior probability in Bayesian theory to characterize the comprehensive influence degree to balance the influence of subjective factors, which has more application value and rationality.
In the actual operation process, when certain piece of equipment of the protection system issues a certain type of forewarning alarm signal, it often indicates a trend of deterioration of the relevant equipment condition. If the alarm signal continues to appear afterwards, it is necessary to increase the weight of these characteristics indicators at this time, so that the status rating of the protection system continues to decline and the operation and maintenance personnel can carry out preventive maintenance as early as possible. In this paper, a variable weight synthesis model based on Factor Space Theory [
29] is used to modify the characteristic quantity weight on the basis of the initial weight, combined with the information of the equipment operation data monitored in real time.
Assuming that the factor state vector is
, the factor constant weight vector is
, and the state variable weight vector is
, then the normalized Hadamard product of
W and
S(X) can obtain the variable weight vector
W(X):
In the formula , α is a variable weight factor, and the degree of heavy change of control rights.
In this paper, the state vector is
,
is the value of the
i-th characteristic quantity
at the current time. Factor constant weight vector is the initial weight of nine characteristic quantities. Formula (9) can be changed into
In the above formula, the general variable weight factor = −1. is the initial weight of the i-th characteristic quantity. and are the distance between the characteristic quantity and the left and right boundary of the node domain, , .
3.2.4. Closeness Calculation and State Determination
This paper uses the concept of closeness degree to calculate the closeness degree of each characteristic index to the state level [
30]. The calculation formula of closeness is shown in Equation (11).
In this paper, the formula of close degree between protection system and “normal”, “attention”, and “severe” three classical domains
R1−3 is
is the closeness between the current protection system and the j-th classical domain . n is the number of characteristic quantities. The distance between the protection system to be evaluated and the classical domain , and are the left and right boundaries of the classical domain , respectively.
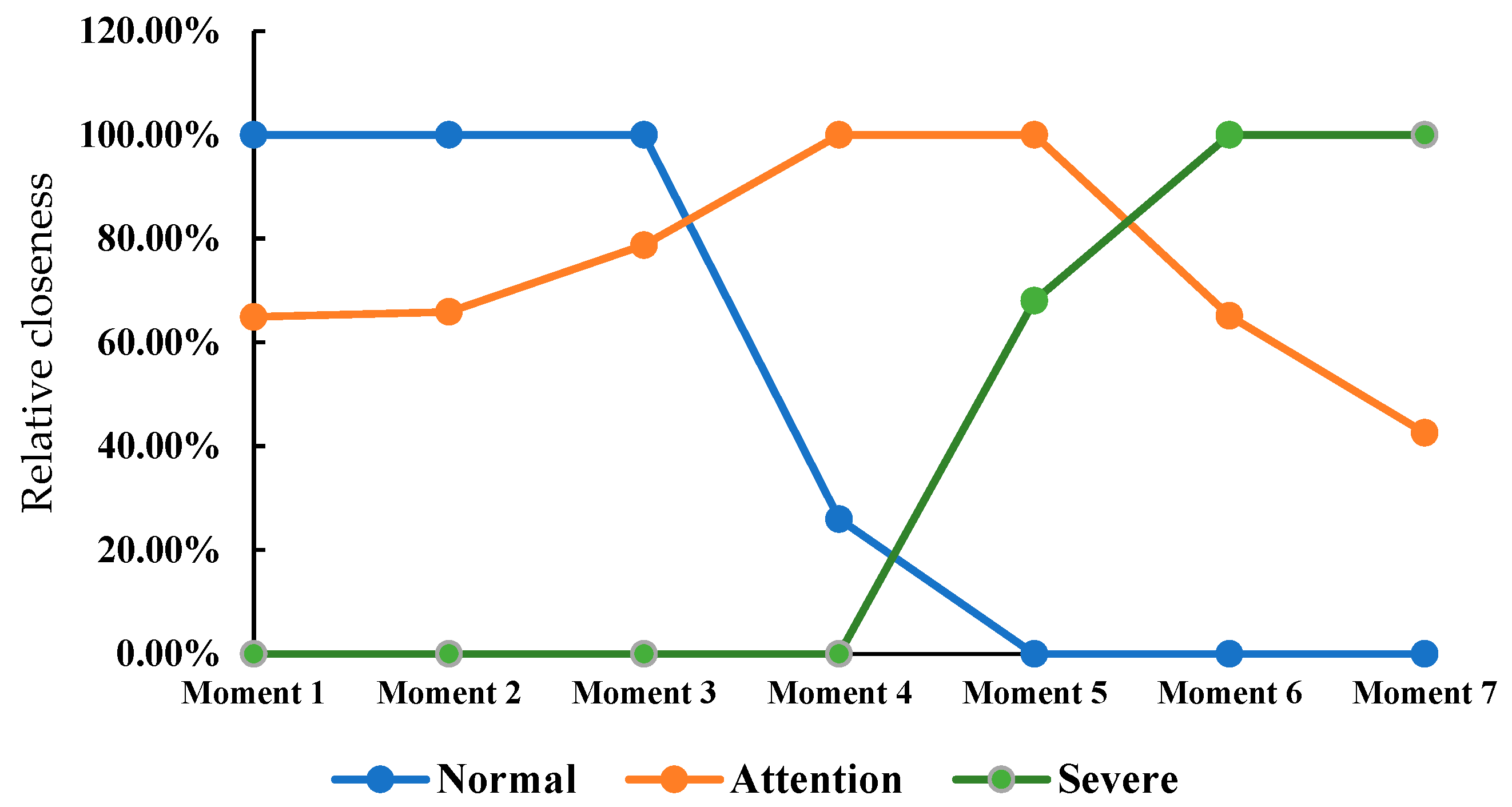
In order to better display the closeness degree and change trend with each classical domain, and to judge the state level, according to the calculated closeness degree, the relative closeness degree of the matter-element to be evaluated can be calculated by the following formula.
In the formula, is the maximum value of the closeness of the matter-element to each state level, and is the minimum value of the closeness of the matter-element to each state level.
The state level with relative closeness degree one is the state evaluation level.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}