
3D JPS Path Optimization Algorithm and Dynamic-Obstacle Avoidance Design Based on Near-Ground Search Drone

Abstract
:Featured Application
Abstract
1. Introduction
2. Related Work
3. Path-Planning Design and Dynamic-Obstacle Avoidance Strategy
3.1. Global Path-Planning Design Based on 3D JPS Algorithm
3.1.1. Traditional JPS Algorithm
3.1.2. 3D Extension of JPS Algorithm
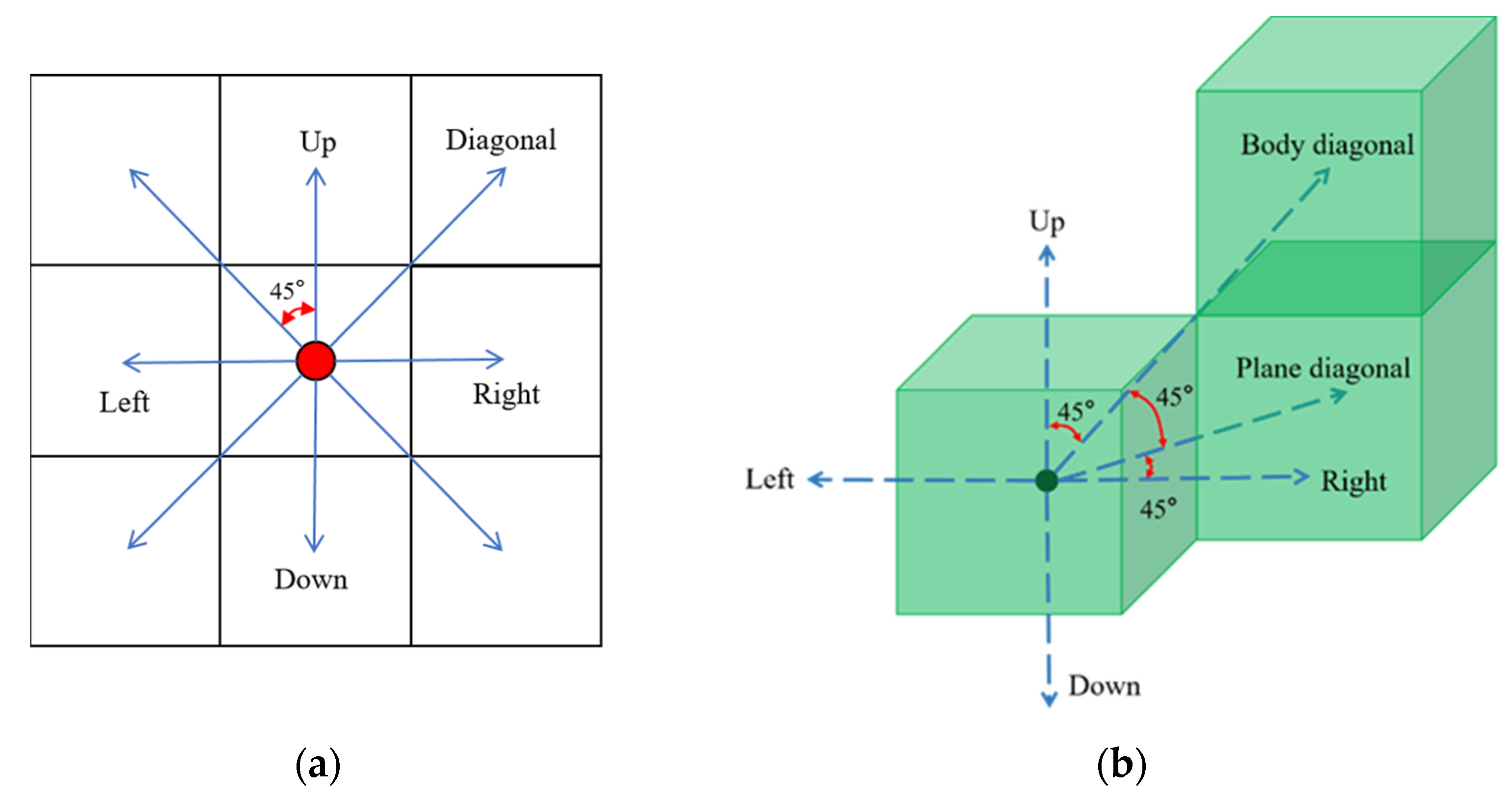
- The parent node of the current node satisfies the two-dimensional pruning rule when it is in the same plane as the current node with linear extension and does not involve other planes, as shown in Figure 7a. The current node needs to prune off any neighbor node in the same plane that satisfies the following constraint :where the function represents the distance between nodes, and represents the set of all nodes that reach from the node without the current node .
- The parent node of the current node and the current node in the same plane diagonal expansion also satisfies the two-dimensional pruning rule, and does not involve other planes, as shown in Figure 7b. That is, it is necessary to prune off any neighbor node in the same plane that satisfies the following constraint:
- If the parent node of the current node and the current node for the body diagonal expansion, the need to expand along the diagonal direction to the upper level while satisfying the formula (b), as shown in Figure 7c.
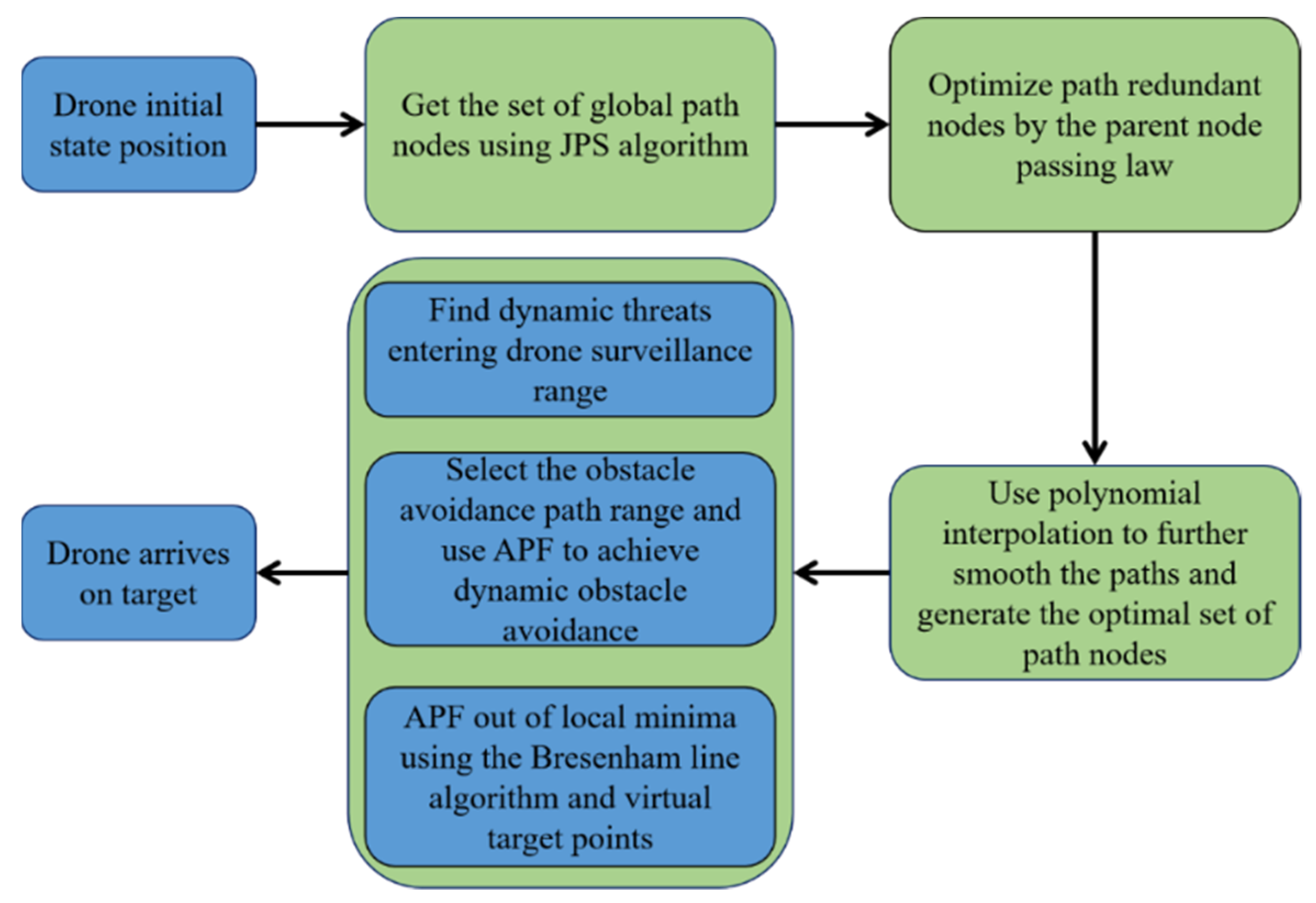
- Initialize the static spatial environment and discretize the drone flight area into a grid model.
- Set the initial position of the drone to and the target point and add to the openlist.
- The neighbor-pruning rule is selected according to the position information of the current node and its parent node, and the expansion direction of the current node is calculated.
- Find jump points by forcing the location of neighbors and add them to the openlist.
- Each node in the openlist is computed by a heuristic function. The node with the smallest computed value is selected as the jump point and the parent node for the next search process.
- Add the nodes that play the role of parent nodes in this search process to the closelist. If there is , the search will be terminated, and the search path will be formed by the list of closelist. If is not present, repeat steps 3 through 6.
3.2. Trajectory Optimization Based on the Resultant Path of 3D JPS Algorithm
3.2.1. An Any-Angle Path-Planning Strategy Based on the Parent Node Transfer Law
- First of all, the path nodes of the 3D JPS algorithm are complemented so that each raster through which the path of the 3D JPS algorithm passes is included in the set of nodes. Let the set of nodes be .
- Set the parent node of all nodes in the node collection to be the initial node. That is, all nodes have direct visibility with the initial node by default.
- Since the parent–child relationship between node and is not modified, it is only necessary to perform LOS reachability detection with from node to node in order to verify whether the visibility between nodes holds.
- If visibility holds, the node between the current node and will be deleted and added to the deletelist without changing the parent node relationship.
- If visibility does not hold, the parent node for the current node needs to be found again in the deletelist, and the parent node of the remaining nodes without LOS detection is replaced with the parent node of the current node to continue the detection.
- When the parent node of is passed, the algorithm ends and the shortest path is output.
| Algorithm 1: Parent Node Passing |
 |
3.2.2. Optimization of Trajectory Smoothing Based on Minimum-Snap Seventh-Order Polynomial Interpolation
| Algorithm 2: Path node interpolation |
 |
3.3. Dynamic-Obstacle-Avoidance Strategy Based on Artificial-Potential-Field Method
3.3.1. Artificial-Potential-Field Method
3.3.2. Escape Method for Local Optimal Solutions of Artificial-Potential-Field Method
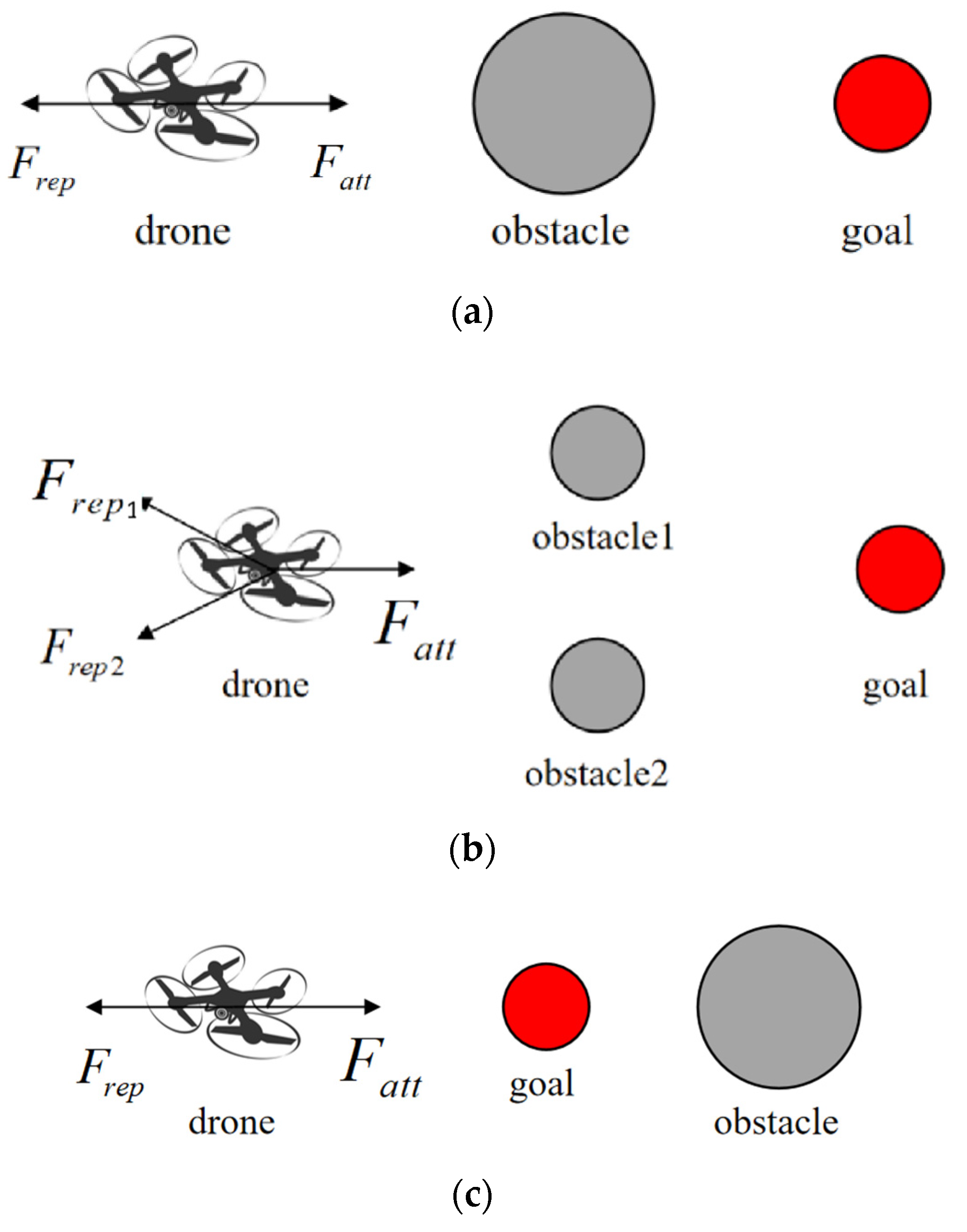
- When the obstacle is directly in front of the target point and the drone is in the same course, and the current drone is subject to gravitational force and repulsive force of the same magnitude and opposite direction, as shown in Figure 12a.
- When the obstacle is on both sides of the drone and the combined direction of the repulsive force is opposite to the direction of the gravitational force and has the same magnitude, as shown in Figure 12b.
- When the obstacle is behind the target point and the repulsive force is much larger than the gravitational force, as shown in Figure 12c.
| Algorithm 3: 3D Bresenham Line |
 |
4. Experiment
4.1. Randomized-Map Experiment
4.2. 3D JPS Algorithm Trajectory Optimization Experiment Based on Open Dataset
4.3. Dynamic-Threat-Based Drone Obstacle Avoidance Experiments
5. Simulation
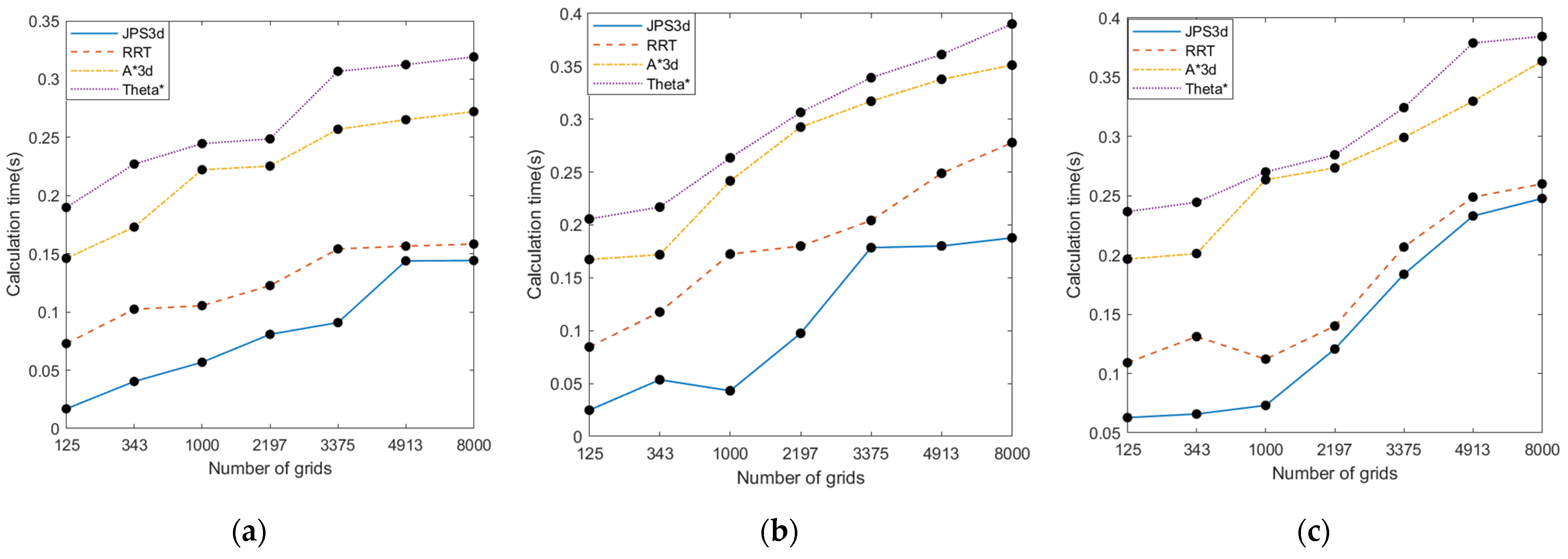
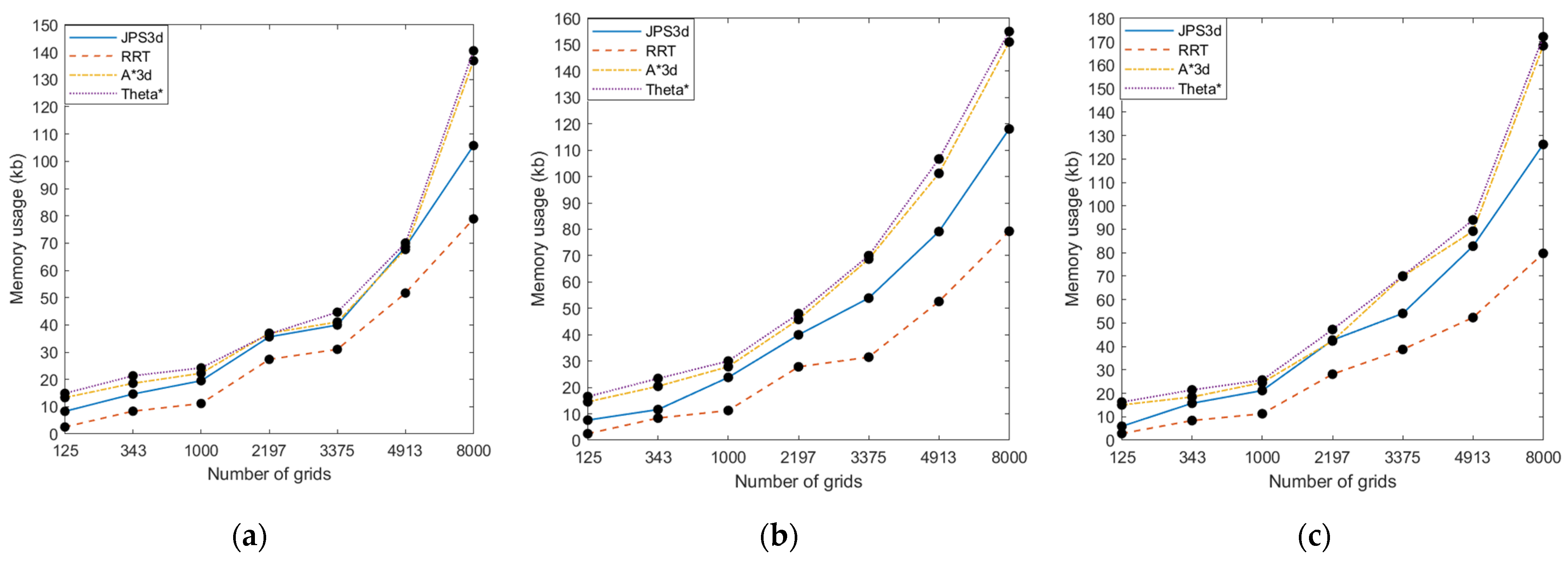
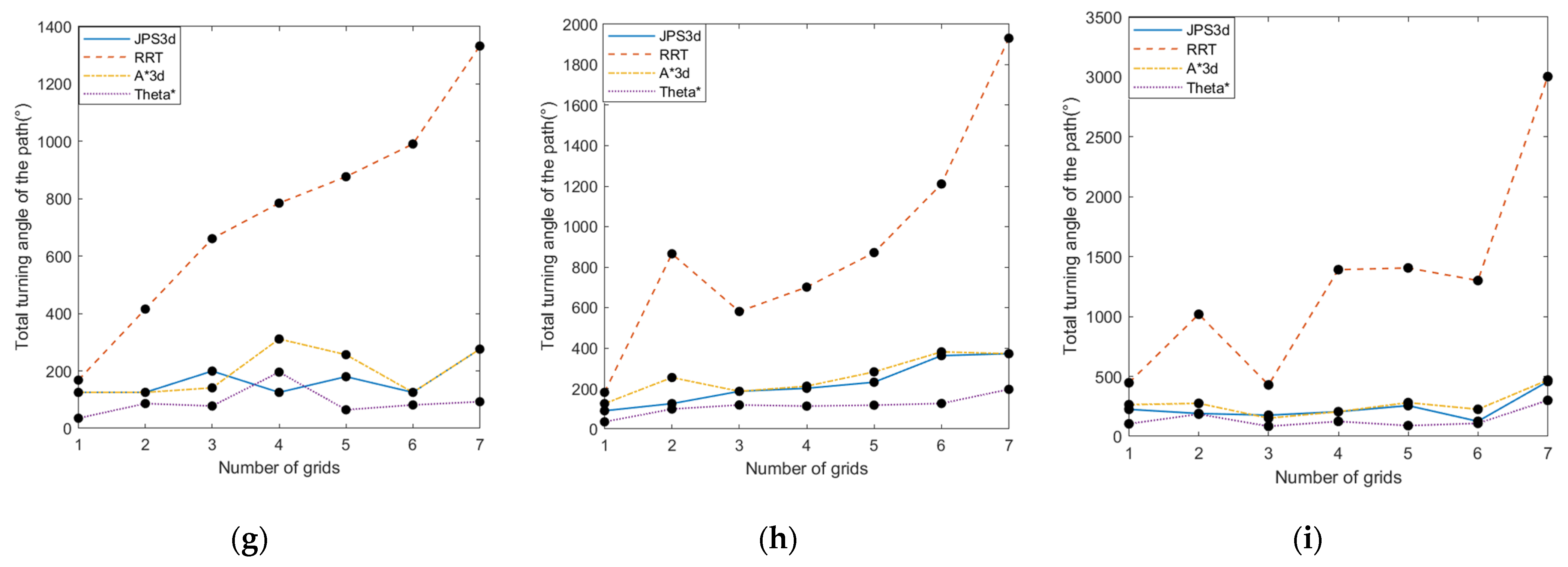
- For the static obstacles in the drone’s working environment, this paper extended the JPS algorithm in three dimensions to guide the drone to perform the mission in the 3D space. The algorithm comparison experiments showed that the 3D JPS algorithm had good expressiveness in terms of time complexity and space complexity. The 3D JPS algorithm reduced the computation time by 88.45% to 30.18% compared to the 3D A* algorithm and by 34.83% to 4.75% compared to the RRT algorithm. The 3D JPS algorithm met the demand for high efficiency in drone search-and-rescue missions. However, it was also found in the comparison experiments that the quality of the final generated paths of the 3D JPS algorithm did not reach the optimum. The 3D JPS algorithm increased the path length by 0.583% to 5.9% and the total path-turning angle by 27% to 98.2% compared to the Theta* algorithm.
- In this paper, the parent node transfer law was used to optimize the generation path for the 3D JPS algorithm. The any-angle path planning of the 3D JPS algorithm was achieved by changing the parent–child node relationship chain among the path nodes to eliminate redundant turning points. Second, this paper introduced seventh-order polynomial-interpolation optimization based on minimum snap to further improve the smoothness and continuity of the path generated by the 3D JPS algorithm. As can be seen from experiment 2, the paths optimized based on the parent node transfer law were 4.8% to 8.1% shorter than the paths obtained by the 3D JPS algorithm, and the total turning angle of the paths was reduced by 51.6% to 93.2%, and the overall optimization effect of the paths is obvious. At the same time, the time complexity as well as the space complexity of the algorithm increased due to the parent node transfer law and polynomial-interpolation optimization, and the computing time increased by 2.5% to 5.4% and the memory usage increased by 0.0014% to 0.0018% compared to the 3D JPS algorithm.
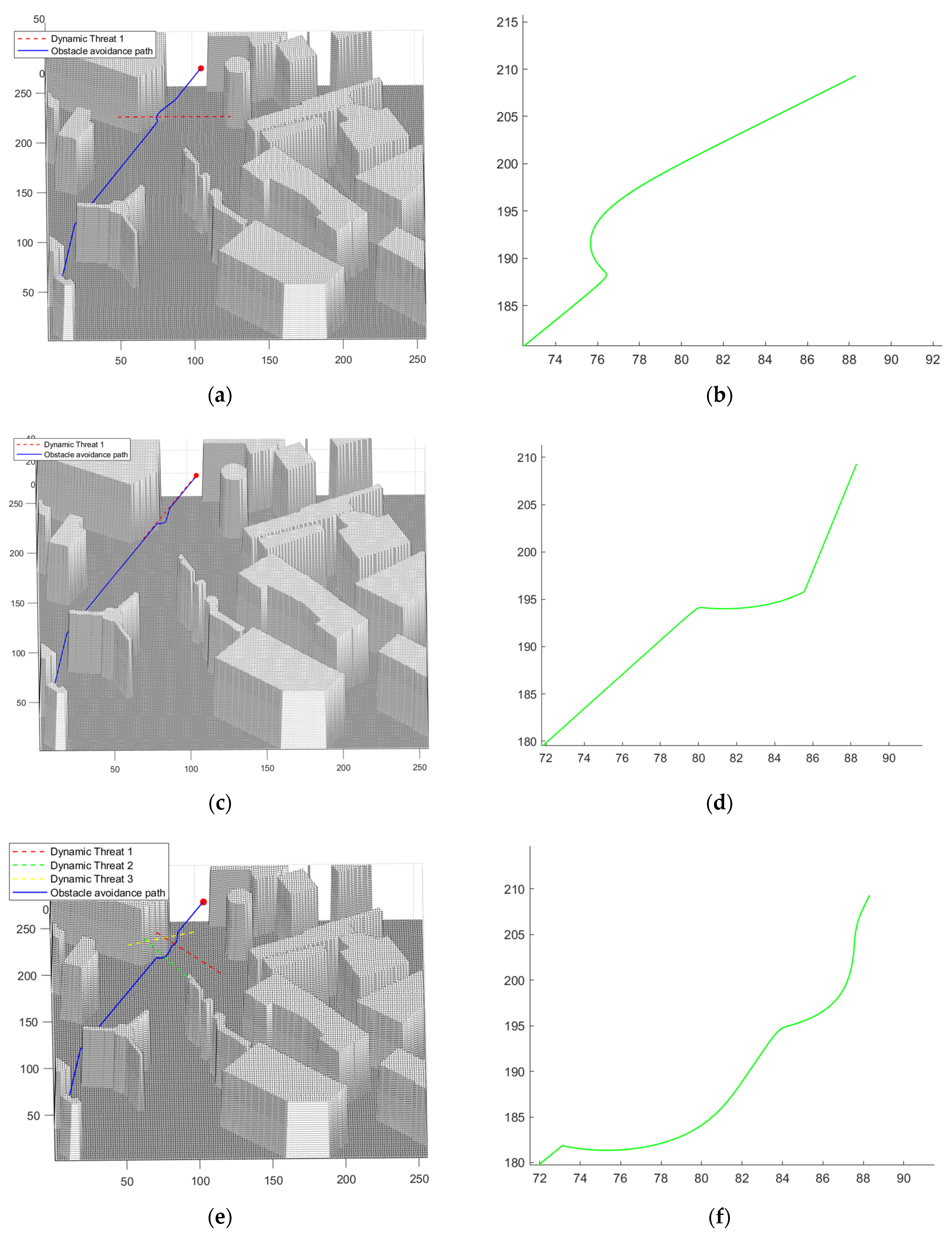
- Finally, this paper used an improved artificial-potential-field-based obstacle avoidance strategy to avoid the dynamic threats that may occur in drone low-level flight operations. Firstly, this paper improved the artificial-potential-field method to address the problem of falling into local optimum, by adding a virtual-target gravitational field and the three-dimensional Bresenham’s line algorithm to induce the drone to achieve local-optimum escape. Secondly, the 3D JPS algorithm combined with an improved artificial-potential-field method was used to avoid obstacles for dynamic threats that come within the alert range. Experiment 3 showed that the dynamic-obstacle-avoidance strategy based on the improved artificial-potential-field method successfully accomplished the obstacle avoidance task in the cases of a single intruder, a reverse intruder with the same trajectory, and multiple intruders. However, the conversion of the 3D JPS algorithm to the artificial-potential-field method and the characteristics of the 3D Bresenham’s line algorithm still led to the problem of unsmooth and excessive cornering in the final result path.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Patle, B.; Pandey, A.; Parhi, D.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Kontitsis, M.; Valavanis, K.P.; Tsourveloudis, N. A UAV vision system for airborne surveillance. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’04), New Orleans, LA, USA, 26 April–1 May 2004; pp. 77–83. [Google Scholar]
- Dileep, M.; Navaneeth, A.; Ullagaddi, S.; Danti, A. A study and analysis on various types of agricultural drones and its applications. In Proceedings of the 2020 Fifth International Conference on Research in Computational Intelligence and Communication Networks (ICRCICN), Bangalore, India, 26–27 November 2020; pp. 181–185. [Google Scholar]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef] [Green Version]
- Vashisth, A.; Batth, R.S.; Ward, R. Existing Path Planning Techniques in Unmanned Aerial Vehicles (UAVs): A Systematic Review. In Proceedings of the 2021 International Conference on Computational Intelligence and Knowledge Economy (ICCIKE), Dubai, United Arab Emirates, 17–18 March 2021; pp. 366–372. [Google Scholar]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceedings of the Proceeding of the 11th World Congress on Intelligent Control and Automation, Shenyang, Chain, 29 June–4 July 2014; pp. 2376–2381. [Google Scholar]
- Rivera, A.; Villalobos, A.; Monje, J.C.N.; Mariñas, J.A.G.; Oppus, C.M. Post-disaster rescue facility: Human detection and geolocation using aerial drones. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 384–386. [Google Scholar]
- Cangan, B.G.; Heintzman, L.; Hashimoto, A.; Abaid, N.; Williams, R.K. Anticipatory human-robot path planning for search and rescue. arxiv 2020, 2009, 03976. [Google Scholar] [CrossRef]
- Mishra, B.; Garg, D.; Narang, P.; Mishra, V. Drone-surveillance for search and rescue in natural disaster. Comput. Commun. 2020, 156, 1–10. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, M.; Low, K.H. 3D path planning and real-time collision resolution of multirotor drone operations in complex urban low-altitude airspace. Transp. Res. Part C Emerg. Technol. 2021, 129, 103123. [Google Scholar] [CrossRef]
- McRae, J.N.; Gay, C.J.; Nielsen, B.M.; Hunt, A.P. Using an unmanned aircraft system (drone) to conduct a complex high altitude search and rescue operation: A case study. Wilderness Environ. Med. 2019, 30, 287–290. [Google Scholar] [CrossRef] [Green Version]
- Shahid, N.; Abrar, M.; Ajmal, U.; Masroor, R.; Amjad, S.; Jeelani, M. Path planning in unmanned aerial vehicles: An optimistic overview. Int. J. Commun. Syst. 2022, 35, e5090. [Google Scholar] [CrossRef]
- Xiaomeng, Z.; Yongjiang, H.; Wenguang, L. Multi-UAV fire fighting mission planning based on improved artificial bee colony algorithm. J. Chin. Inert. Technol. 2020, 28, 528–536. [Google Scholar]
- Dong, S. Application research of quadrotor UAV motion planning system based on heuristic search and minimum-snap trajectory optimization. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; pp. 2270–2274. [Google Scholar]
- Chen, H.; Lu, P.; Xiao, C. Dynamic obstacle avoidance for UAVs using a fast trajectory planning approach. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 1459–1464. [Google Scholar]
- Budiyanto, A.; Cahyadi, A.; Adji, T.B.; Wahyunggoro, O. UAV obstacle avoidance using potential field under dynamic environment. In Proceedings of the 2015 International Conference on Control, Electronics, Renewable Energy and Communications (ICCEREC), Bandung, Indonesia, 27–29 August 2015; pp. 187–192. [Google Scholar]
- Jianmeng, H.; Yuxiong, W.; Xiezhao, L. Smooth JPS path planning and trajectory optimization method of mobile robot. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2021, 52, 21–29+121. [Google Scholar]
- Zha, T.; Li, Y.; Sun, L. A Local Planning Method Based on Minimum Snap Trajectory Generation and Traversable Region for Inspection of Airport Roads. In Proceedings of the 2021 5th International Conference on Automation, Control and Robots (ICACR), Nanning, China, 25–27 September 2021; pp. 38–42. [Google Scholar]
- Dongcheng, L.; Jiyang, D. Research on Multi-UAV Path Planning and Obstacle Avoidance Based on Improved Artificial Potential Field Method. In Proceedings of the 2020 3rd International Conference on Mechatronics, Robotics and Automation (ICMRA), Shanghai, China, 16–18 October 2020; pp. 84–88. [Google Scholar]
- Chunfang, X.; Haibin, D.; Fang, L. Chaotic artificial bee colony approach to Uninhabited Combat Air Vehicle (UCAV) path planning. Int. J. Intell. Comp. Cybern. 2010, 14, 535–541. [Google Scholar]
- Chen, X.; Zhao, M.; Yin, L. Dynamic path planning of the UAV avoiding static and moving obstacles. J. Intell. Robot. Syst. 2020, 99, 909–931. [Google Scholar] [CrossRef]
- Hrabar, S. 3D path planning and stereo-based obstacle avoidance for rotorcraft UAVs. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 807–814. [Google Scholar]
- Traish, J.; Tulip, J.; Moore, W. Optimization using boundary lookup jump point search. IEEE Trans. Comput. Intell. AI Games 2015, 8, 268–277. [Google Scholar] [CrossRef]
- Wei, Y.; Zhu, D.; Chu, Z. Underwater dynamic target tracking of autonomous underwater vehicle based on MPC algorithm. In Proceedings of the 2018 IEEE 8th International Conference on Underwater System Technology: Theory and Applications (USYS), Wuhan, China, 1–3 December 2018; pp. 1–5. [Google Scholar]
- Kuriki, Y.; Namerikawa, T. Formation control with collision avoidance for a multi-UAV system using decentralized MPC and consensus-based control. SICE J. Control. Meas. Syst. Integr. 2015, 8, 285–294. [Google Scholar] [CrossRef]
- Yu-Geng, X.; De-Wei, L.; Shu, L. Model predictive control—Status and challenges. Acta Autom. Sin. 2013, 39, 222–236. [Google Scholar]
- dos Santos, R.R.; Steffen, V.; Saramago, S.d.F. Robot path planning in a constrained workspace by using optimal control techniques. Multibody Syst. Dyn. 2008, 19, 159–177. [Google Scholar] [CrossRef]
- Lindqvist, B.; Mansouri, S.S.; Agha-mohammadi, A.-A.; Nikolakopoulos, G. Nonlinear MPC for collision avoidance and control of UAVs with dynamic obstacles. IEEE Robot. Autom. Lett. 2020, 5, 6001–6008. [Google Scholar] [CrossRef]
- Kim, J.-C.; Pae, D.-S.; Lim, M.-T. Obstacle avoidance path planning based on output constrained model predictive control. Int. J. Control. Autom. Syst. 2019, 17, 2850–2861. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: Berlin/Heidelberg, Germany, 1986; pp. 396–404. [Google Scholar]
- Kumar, P.B.; Rawat, H.; Parhi, D.R. Path planning of humanoids based on artificial potential field method in unknown environments. Expert Syst. 2019, 36, e12360. [Google Scholar] [CrossRef]
- Li, Y.; Tian, B.; Yang, Y.; Li, C. Path planning of robot based on artificial potential field method. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; pp. 91–94. [Google Scholar]
- Wang, H.; Hao, C.; Zhang, P.; Zhang, M.; Yin, P.; Zhang, Y. Path planning of mobile robots based on A* algorithm and artificial potential field algorithm. China Mech. Eng. 2019, 30, 2489. [Google Scholar]
- Harabor, D.; Grastien, A. Online graph pruning for pathfinding on grid maps. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 7–11 August 2011; pp. 1114–1119. [Google Scholar]
- Jia, J.; Pan, J.-S.; Xu, H.-R.; Wang, C.; Meng, Z.-Y. An Improved JPS Algorithm in Symmetric Graph. In Proceedings of the 2015 Third International Conference on Robot, Vision and Signal Processing (RVSP), Kaohsiung, Taiwan, 18–20 November 2015; pp. 208–211. [Google Scholar]
- Luo, Y.; Lu, J.; Qin, Q.; Liu, Y. Improved JPS Path Optimization for Mobile Robots Based on Angle-Propagation Theta* Algorithm. Algorithms 2022, 15, 198. [Google Scholar] [CrossRef]
- Zhou, K.; Yu, L.; Long, Z.; Mo, S. Local path planning of driverless car navigation based on jump point search method under urban environment. Future Internet 2017, 9, 51. [Google Scholar] [CrossRef] [Green Version]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE international conference on robotics and automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Map Name | Algorithm Type | Path Length (m) | Total Turning Angle of the Path (°) | Calculation Time (s) | Memory Usage (kb) | Number of Nodes |
|---|---|---|---|---|---|---|
| mountain region 1 | JPS3d | 156.385 | 1976.610 | 9.848 | 12,678.968 | 108 |
| PNP-JPS3d | 144.965 | 421.465 | 10.029 | 12,679.540 | 14 | |
| OP-PNP-JPS3d | 144.966 | NULL | 10.384 | 12,681.331 | 501 | |
| mountain region 2 | JPS3d | 125.187 | 1011.851 | 12.120 | 14,137.523 | 91 |
| PNP-JPS3d | 115.041 | 183.576 | 12.302 | 14,138.243 | 11 | |
| OP-PNP-JPS3d | 115.148 | NULL | 12.421 | 14,138.492 | 495 | |
| mountain region 3 | JPS3d | 137.329 | 1515.288 | 8.795 | 14,991.102 | 94 |
| PNP-JPS3d | 130.699 | 732.246 | 9.035 | 14,991.821 | 25 | |
| OP-PNP-JPS3d | 130.700 | NULL | 9.506 | 14,992.329 | 507 | |
| London | JPS3d | 82.332 | 546.057 | 5.503 | 9217.221 | 16 |
| PNP-JPS3d | 78.036 | 143.024 | 5.580 | 9218.319 | 10 | |
| OP-PNP-JPS3d | 78.038 | NULL | 5.739 | 9218.970 | 477 | |
| New York | JPS3d | 93.629 | 1195.529 | 6.946 | 9679.211 | 33 |
| PNP-JPS3d | 87.548 | 255.291 | 7.171 | 9680.490 | 11 | |
| OP-PNP-JPS3d | 87.550 | NULL | 7.233 | 9680.992 | 483 | |
| Boston | JPS3d | 113.470 | 520.528 | 9.603 | 10,149.380 | 25 |
| PNP-JPS3d | 107.483 | 35.567 | 9.787 | 10,150.194 | 4 | |
| OP-PNP-JPS3d | 107.284 | NULL | 9.871 | 10,150.870 | 499 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Y.; Lu, J.; Zhang, Y.; Qin, Q.; Liu, Y. 3D JPS Path Optimization Algorithm and Dynamic-Obstacle Avoidance Design Based on Near-Ground Search Drone. Appl. Sci. 2022, 12, 7333. https://doi.org/10.3390/app12147333
Luo Y, Lu J, Zhang Y, Qin Q, Liu Y. 3D JPS Path Optimization Algorithm and Dynamic-Obstacle Avoidance Design Based on Near-Ground Search Drone. Applied Sciences. 2022; 12(14):7333. https://doi.org/10.3390/app12147333
Chicago/Turabian StyleLuo, Yuan, Jiakai Lu, Yi Zhang, Qiong Qin, and Yanyu Liu. 2022. "3D JPS Path Optimization Algorithm and Dynamic-Obstacle Avoidance Design Based on Near-Ground Search Drone" Applied Sciences 12, no. 14: 7333. https://doi.org/10.3390/app12147333