
The Parameter Design of Nonlinear Energy Sink Installed on the Jacket Pipe by Using the Nonlinear Dynamical Theory


Abstract
:1. Introduction
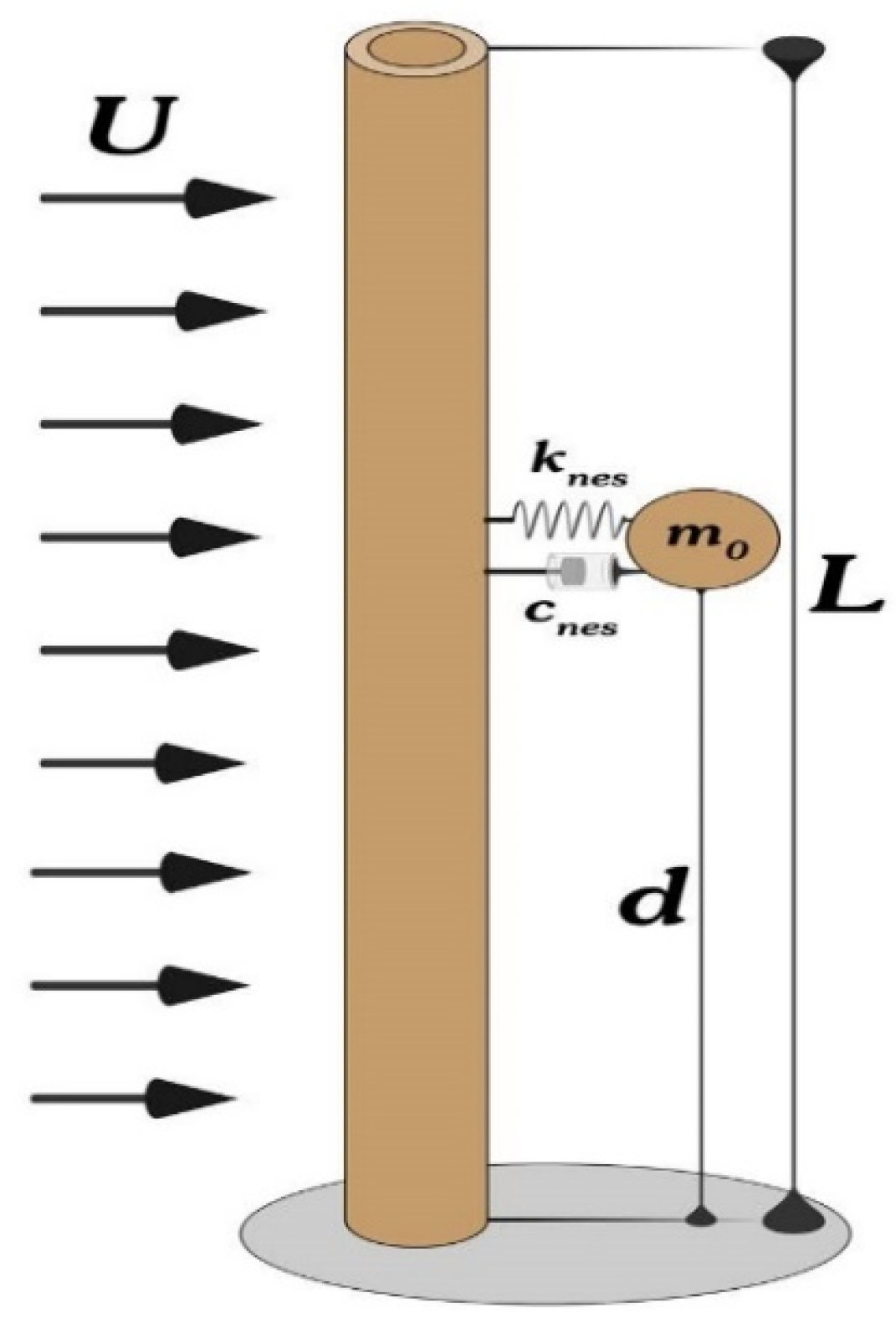
2. Establishment of Pipe-NES Coupling Dynamic Model
3. Approximate Solution Based on the Multi-Scale Mixed Harmonic Balance Method
3.1. Approximate Analytical Solutions of the Nonlinear Equations
3.2. Stability Analysis of the Trivial Solution
4. Results and Analysis
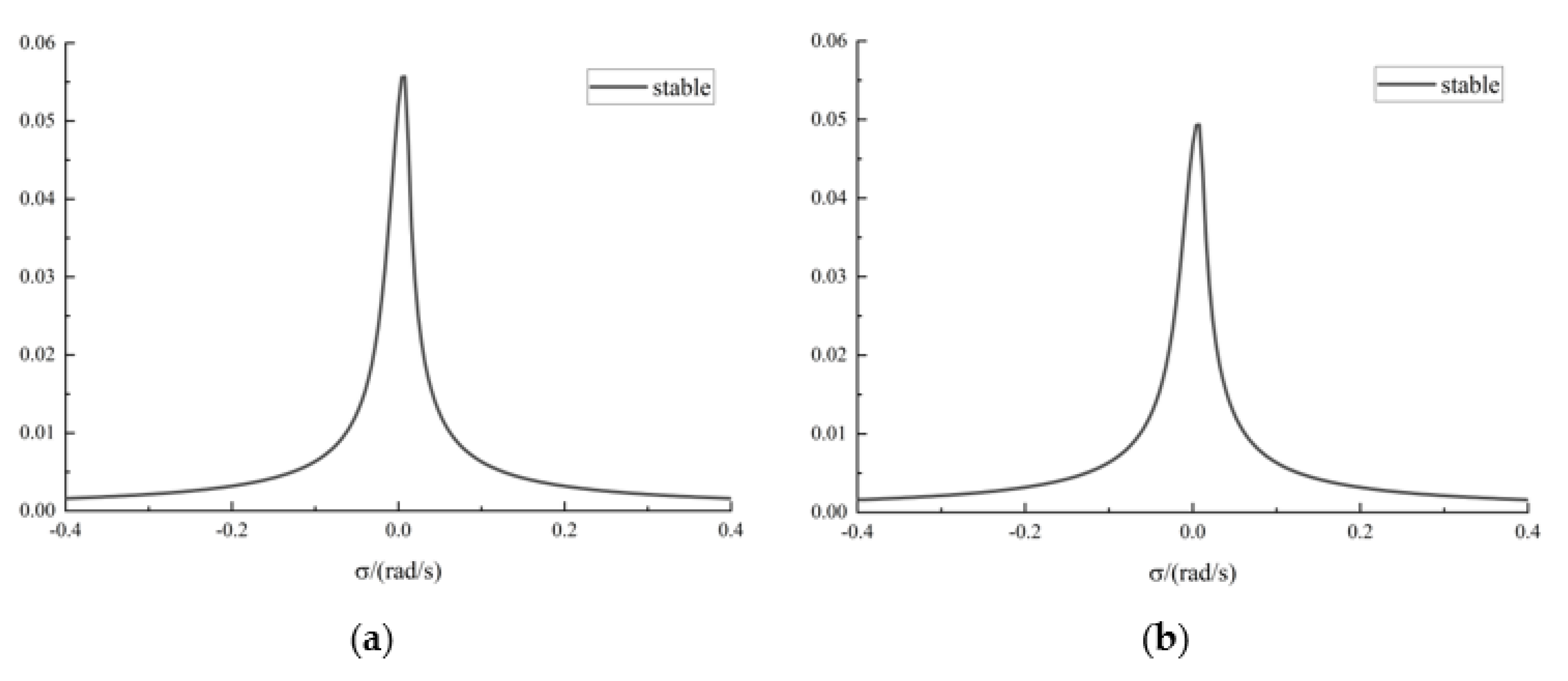
4.1. Verification of Analytical Results and Response Analysis
4.2. Response Characteristics and Parameter Influence Analysis
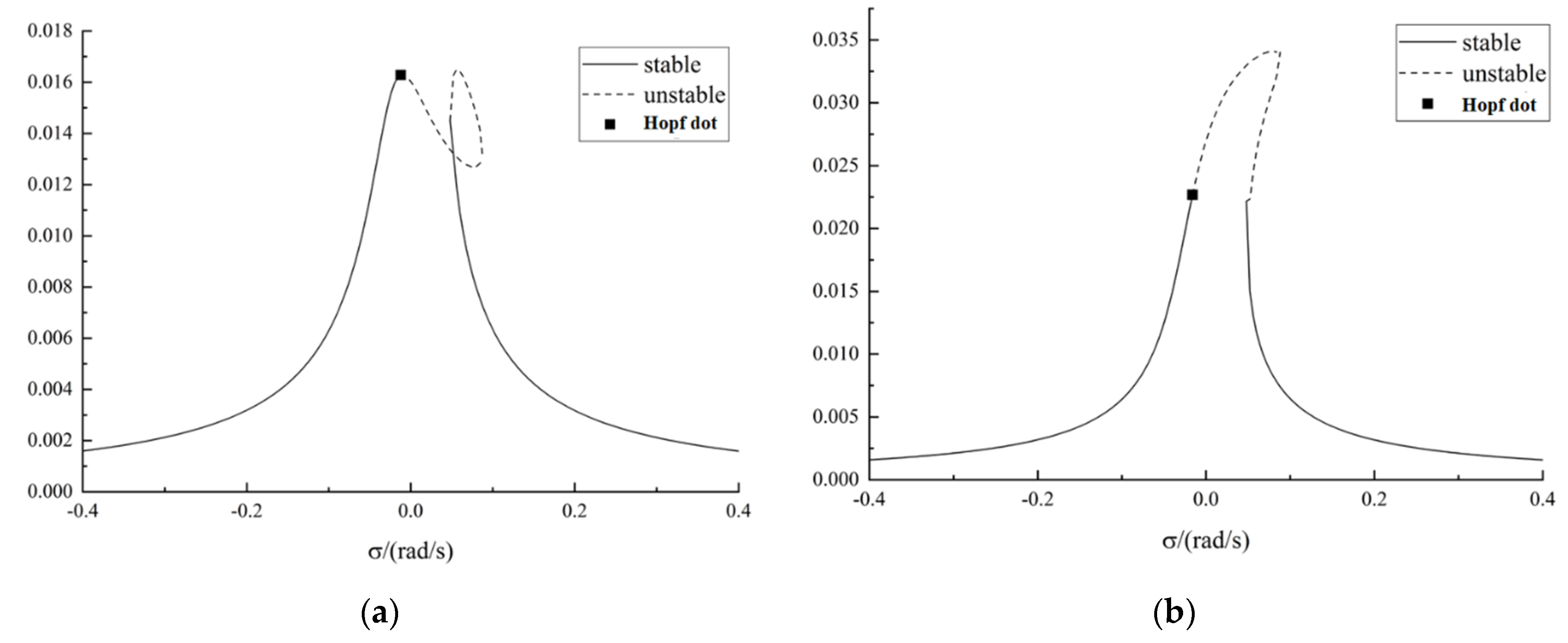
4.2.1. Influence Analysis of NES Nonlinear Stiffness
4.2.2. Influence Analysis of NES Damping
5. Conclusions
- (1)
- The approximate analytical solution of the coupled dynamic equation was solved by using the multi-scale mixed harmonic balance method. The stability of the trivial solution of the system was analyzed according to the Routh–Hurwitz criterion. The correctness of the theoretical derivation process was verified by comparison with numerical solutions.
- (2)
- The nonlinear stiffness has a great influence on the nonlinear motion of the pipe. When the nonlinear stiffness increases to a certain extent, saddle-node bifurcation and Hopf bifurcation appear, and the motion form of the pipe is more complex, while the vibration amplitude of the pipe is greatly suppressed. Therefore, the vortex-induced resonance of the pipe can be effectively suppressed by reasonably selecting the nonlinear stiffness of an NES.
- (3)
- For a system with nonlinear motion, an NES damping mainly affects the range of the unstable region of the pipe. The larger the damping, the smaller the unstable region of the amplitude-frequency response curve. For a system without nonlinear motion, increasing an NES damping will decrease the response amplitude of the pipe near the resonance region. A reasonable combination of nonlinear stiffness and damping should be considered.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
| is the mass of the pipe. |
| is the mass of an NES. |
| is the damping of the pipe. |
| is the damping of an NES. |
| is the structural stiffness of the pipe. |
| is the cubic stiffness of an NES. |
| , , are the displacement, velocity and acceleration of the pipe. |
| , , are the displacement, velocity and acceleration of an NES. |
| is the vortex shedding frequency. |
| z is the relative displacement of the pipe and NES. |
| is the small value parameter. |
| is the coordination factor. |
| is the differential operator. |
| cc is the conjugate complex. |
| A is the undetermined complex function of the variable . |
| B2 is the undetermined complex function of . |
| , , , is the function related to . |
| is the eigen value of the characteristic equation. |
| is the coefficient of the characteristic equation. |
References
- Jiakun, L. Study on vortex-induced vibration of jacket during construction. Harbin Inst. Technol. 2016. [Google Scholar]
- Xiaoxu, C.; Rui, W.; Shugeng, Y.; Yang, P.; Yi, L. Calculation method of stroke-induced vibration of jacket during towing. J. Oil Field Equip. 2012, 41, 33–37. [Google Scholar]
- Chunyan, J. Research on dynamic response analysis and vibration control technology of offshore platform. Ocean. Univ. China 2003. [Google Scholar] [CrossRef]
- Hermann, F. Device for Damping Vibrations of Bodies. US Patent 0,989,958, 30 October 1909. [Google Scholar]
- Vakakis, A.F. Inducing Passive Nonlinear Energy Sinks in Vibrating Systems. J. Vib. Acoust. 2001, 123, 324–332. [Google Scholar] [CrossRef]
- Georgiades, F.; Vakakis, A.F. Dynamics of a linear beam with an attached local nonlinear energy sink. Commun. Nonlinear Sci. 2007, 12, 643–651. [Google Scholar] [CrossRef] [Green Version]
- Ahmadabadi, Z.N.; Khadem, S.E. Nonlinear vibration control of a cantilever beam by a nonlinear energy sink. Mech. Mach. Theory 2012, 50, 134–149. [Google Scholar] [CrossRef]
- Zhou, K.; Xiong, F.R.; Jiang, N.B.; Dai, H.L.; Yan, H.; Wang, L. Nonlinear vibration control of a cantilevered fluid-conveying pipe using the idea of nonlinear energy sink. Nonlinear Dyn. 2019, 95, 1435–1456. [Google Scholar] [CrossRef]
- Zhang, Y.W.; Hou, S.; Zhang, Z.; Zang, J.; Chen, L.Q. Nonlinear vibration absorption of laminated composite beams in complex environment. Nonlinear Dyn. 2020, 99, 2605–2622. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Wang, L. Vortex-induced vibrations mitigation through a nonlinear energy sink. Commun. Nonlinear Sci. 2017, 42, 22–36. [Google Scholar] [CrossRef]
- Chen, D.; Abbas, L.K.; Wang, G.; Rui, X.; Pier, M. Numerical study of flow-induced vibrations of cylinders under the action of nonlinear energy sinks (NESs). Nonlinear Dyn. 1992, 94, 925–957. [Google Scholar] [CrossRef]
- Blanchard, A.B.; Gendelman, O.V.; Bergman, L.A.; Lawrence, A.; Bergman, A.; Alexander, F.; Vakakis, C. Capture into slow invariant manifold in the fluid-structure dynamics of a sprung cylinder with a nonlinear rotator. J. Fluid. Struct. 2016, 63, 155–173. [Google Scholar] [CrossRef] [Green Version]
- Liqin, L.; Yiqun, C.; Wenjun, S.; Hao, L.; Zhiqiang, W. Study on Wind-induced Vortex- induced Vibration and Vibration Reduction of Tubular Platform under Construction. Ocean Eng. 2021, 39, 1–8. [Google Scholar] [CrossRef]
- Zheng, L.; Zixin, W.; Xilin, W. Summary of Research on Nonlinear Energy Trapping Technology. J. Vib. Shock 2020, 39, 1–16+26. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Yang, C.; Wu, D. A novel interval dynamic reliability computation approach for the risk evaluation of vibration active control systems based on PID controllers. Appl. Math. Model. 2021, 92, 422–446. [Google Scholar] [CrossRef]
- Yiqun, C. Study on Characteristics and Mechanism of Wind-Vortex-Induced Vibration of Jacket Platform; School of Civil Engineering of Tianjin University: Tianjin, China, 2021. [Google Scholar]
- Jiawei, Z.; Yougang, T.; Yan, L.; Xiaoqi, Q.; Ruoyu, Z. Effect of vortex-induced resonance on motion response of Spar floating fan in wind and wave flow. Ocean Eng. 2018, 36, 39–49. [Google Scholar] [CrossRef]
- Starosvetsky, Y.; Gendelman, O.V. Attractors of harmonically forced linear oscillator with attached nonlinear energy sink. II: Optimization of a nonlinear vibration absorber. Nonlinear Dyn. 2008, 51, 47. [Google Scholar] [CrossRef]
- Gendelman, O.V.; Starosvetsky, Y.; Feldman, M. Attractors of harmonically forced linear oscillator with attached nonlinear energy sink I: Description of response regimes. Nonlinear Dyn. 2008, 51, 31–46. [Google Scholar] [CrossRef]
- Jian, Z. Complex Dynamics Study and Vibration Suppression Evaluation Method of Nonlinear Energy Well; Shanghai University: Shanghai, China, 2021. [Google Scholar]
- Luongo, A.; Zulli, D. Dynamic analysis of externally excited NES-controlled systems via a mixed Multiple Scale/Harmonic Balance algorithm. Nonlinear Dyn. 2012, 70, 2049–2061. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Wang, L.; Gu, K.; Li, M. Artificial Neural Network (ANN)-Bayesian Probability Framework (BPF) based method of dynamic force reconstruction under multi-source uncertainties. Knowl.-Based Syst. 2022, 237, 107796. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.; Liu, D.; Wu, Z. A novel dynamic reliability-based topology optimization (DRBTO) framework for continuum structures via interval-process collocation and the first-passage theories. Comput. Methods Appl. Mech. Eng. 2021, 386, 114107. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.; Li, M. Time-dependent reliability-based optimization for structural-topological configuration design under convex-bounded uncertain modeling. Reliab. Eng. Syst. Saf. 2022, 221, 108361. [Google Scholar] [CrossRef]
- Jinyan, Z.; Jian, X. Vibration reduction mechanism of nonlinear dynamic absorber with time delay. Theor. Appl. Mech. 2008, 1, 98–106. [Google Scholar]
- Rui, W. Research on Prevention and Control Measures of Wind-Induced Vibration of Jacket during Towing Process; Tianjin University: Tianjin, China, 2012. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Parameters |
|---|---|
| Mass | 247 kg |
| Natural frequency | 0.78 Hz |
| Damping ratio | 0.0015 |
| Velocity of wind flow | 2.5–3.1 m/s |
| Diameter | 0.762 m |
| Density of air | 1.225 kg/m3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Liu, L.; Luo, C.; Yu, Y.; Chen, Y. The Parameter Design of Nonlinear Energy Sink Installed on the Jacket Pipe by Using the Nonlinear Dynamical Theory. Appl. Sci. 2022, 12, 7272. https://doi.org/10.3390/app12147272
Yang L, Liu L, Luo C, Yu Y, Chen Y. The Parameter Design of Nonlinear Energy Sink Installed on the Jacket Pipe by Using the Nonlinear Dynamical Theory. Applied Sciences. 2022; 12(14):7272. https://doi.org/10.3390/app12147272
Chicago/Turabian StyleYang, Lianfeng, Liqin Liu, Chao Luo, Yongjun Yu, and Yiqun Chen. 2022. "The Parameter Design of Nonlinear Energy Sink Installed on the Jacket Pipe by Using the Nonlinear Dynamical Theory" Applied Sciences 12, no. 14: 7272. https://doi.org/10.3390/app12147272