
Numerical Simulation of the Kelvin Wake Patterns

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
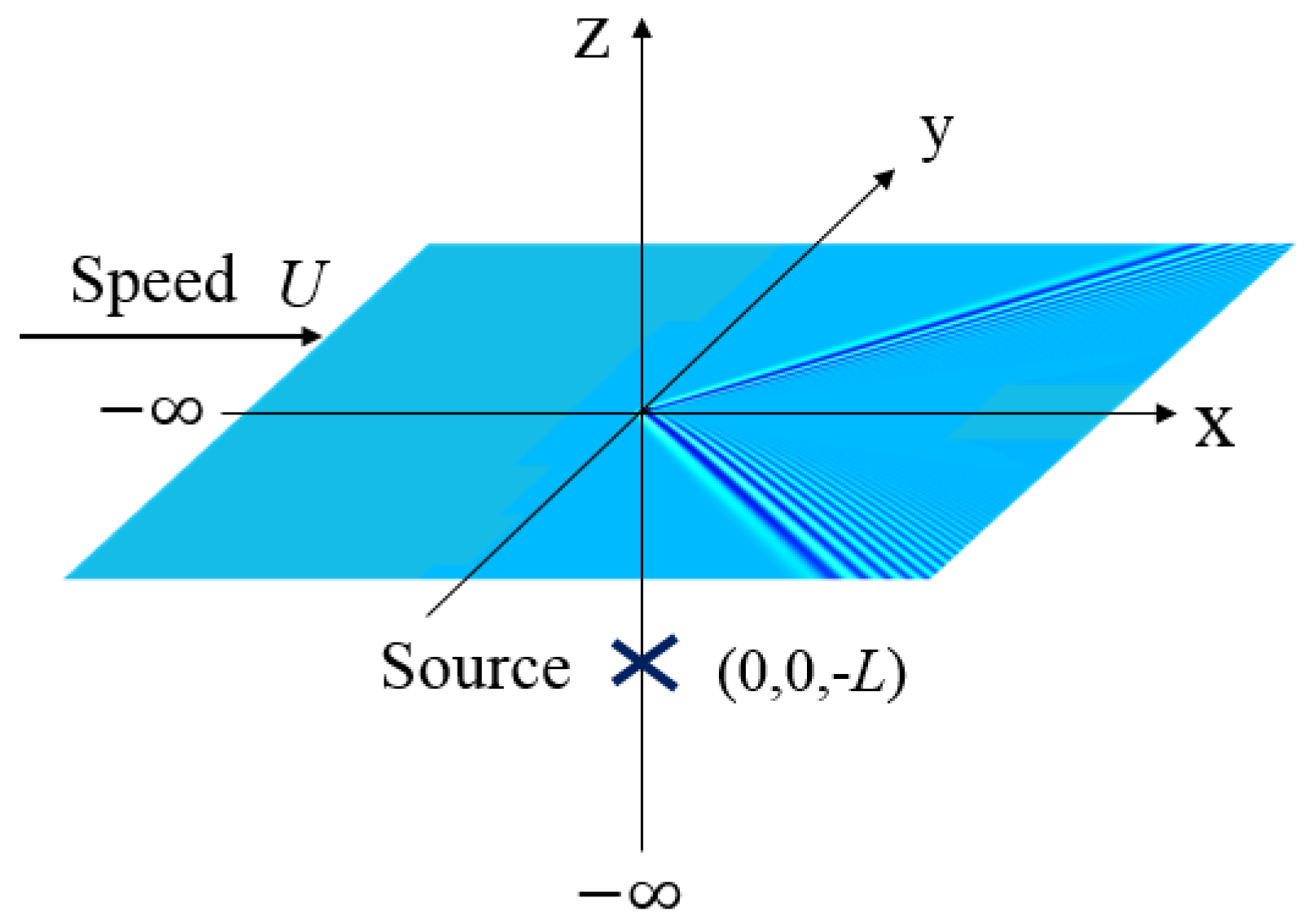
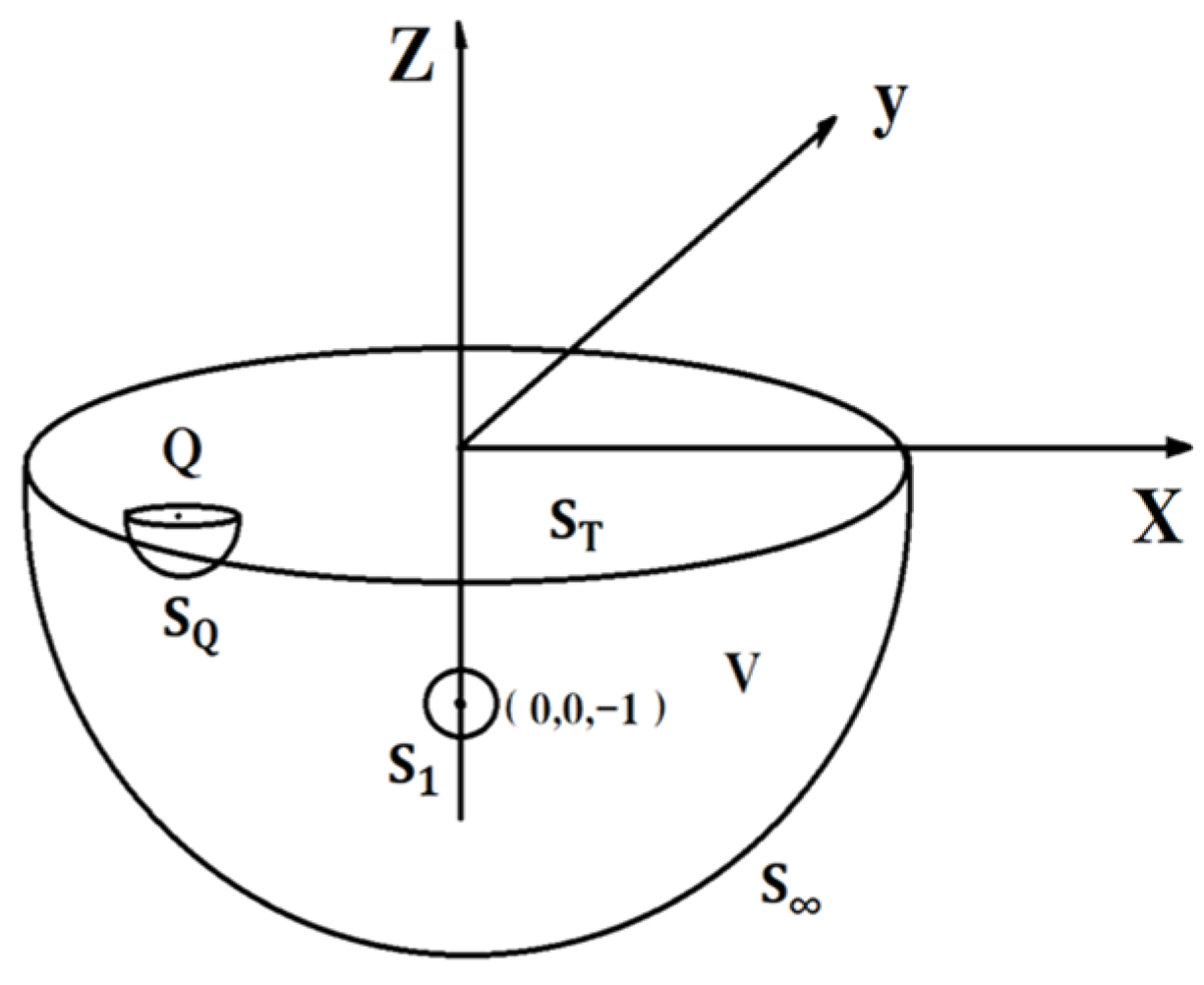
2. Problem Formulation
3. Numerical Methods
3.1. Numerical Discretization
- The free surface elevation is zero;
- The vertical component of velocity is zero;
- The free surface elevation decays exponentially;
- The vertical component of velocity decays exponentially.
3.2. Jacobian−Free Newton–Krylov Method
4. Simulation Results
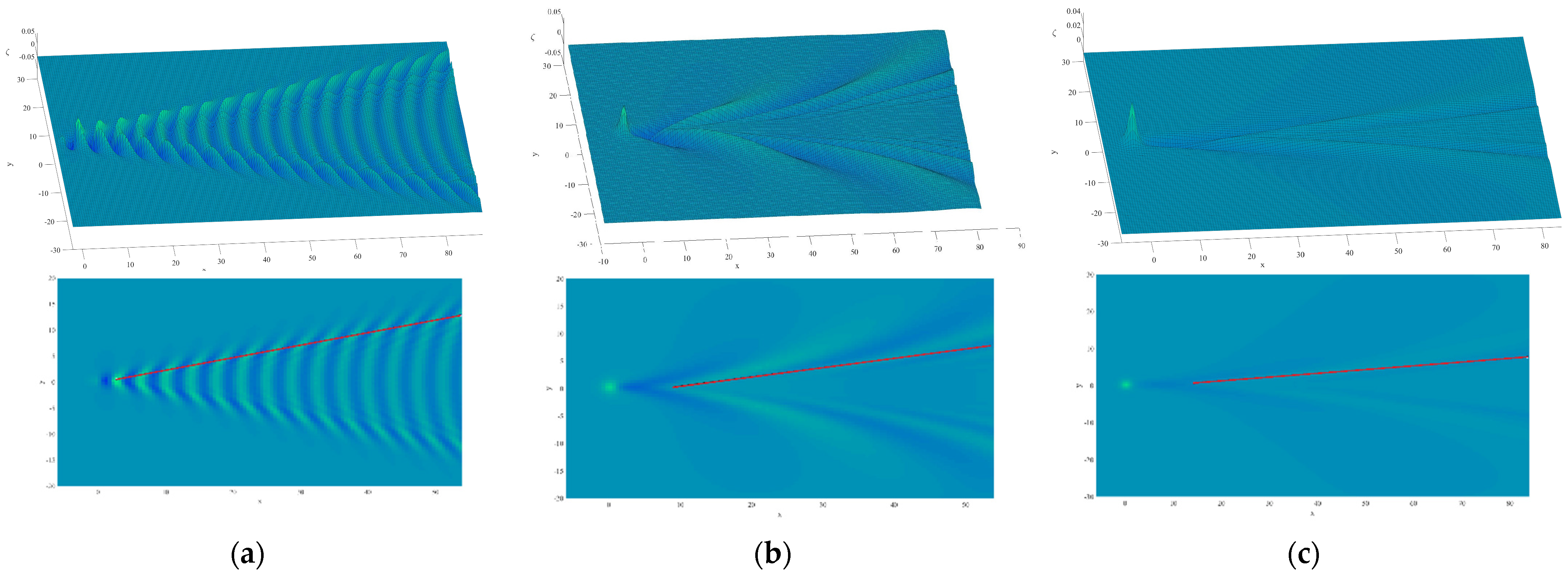
- The ship waves have small wake angle, prominent divergent waves and long wavelength. In this case, the vessel’s overall length is short but its speed is high. In Figure 5a, there is a wake wave from the speedboat. Therefore, the Rankine source is utilized to make divergent waves conspicuous, then continuously increasing the Froude number until the wake angle is suitable. The simulation result is consistent with the real ship wave pattern.
- The wake angles are the same as Kelvin angle, with prominent transverse waves and either the value of overall length or speed is not large, like the pilot boat in Figure 5c (note that: due to the far perspective, the entire wake pattern looks slightly smaller. However, the primary waveform is also consistent with Figure 5d). It is better to choose the Kelvin source, low source strength and the moderately small value of the Froude number. The perspective view of the pattern for is presented in Figure 5d.
- The ship waves have large wage angle, prominent divergent waves and short wavelength. Generally, only the large vessels can profile these wakes (Figure 5e). It is right to enhance the source strength to increase the wake angle, and then utilize the Rankine source to make the divergent waves prominent. The perspective view of the pattern for is presented in Figure 5f.
5. Discussions of Kelvin Wake Angle
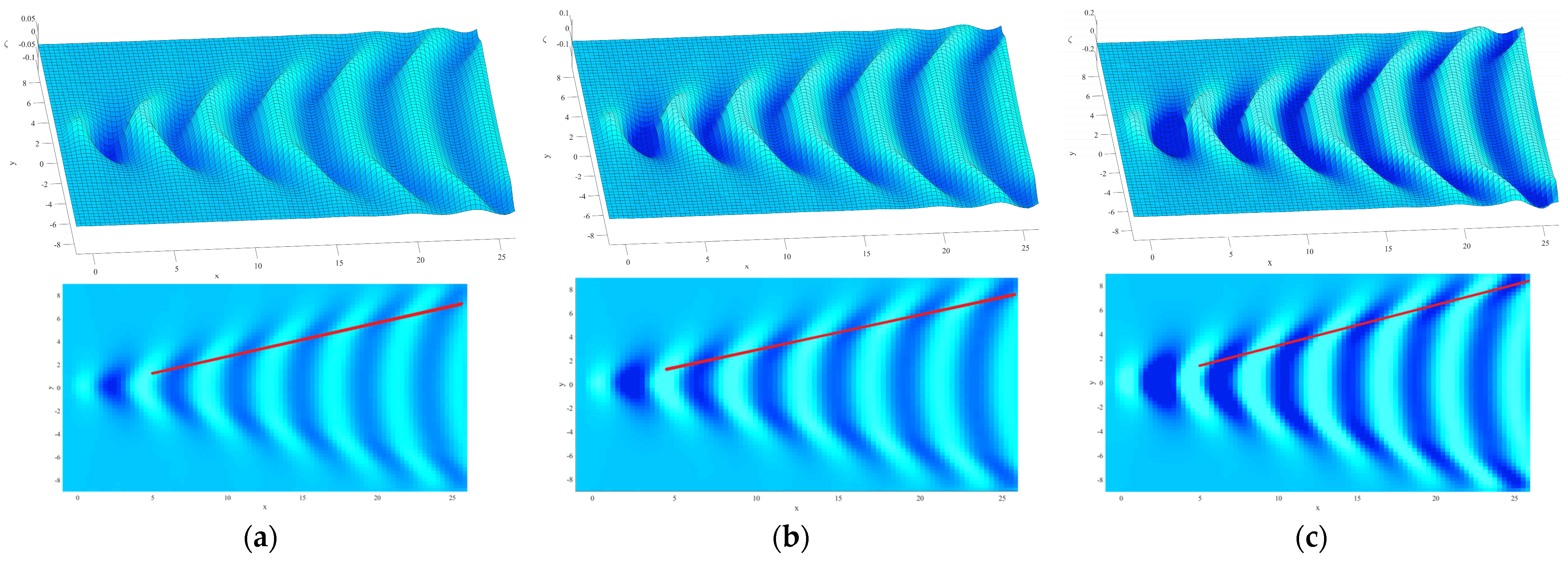
5.1. The Effect of Froude Number on Wake Angle
5.2. The Effect of Source Strength on Wake Angle
5.3. The Effect of Source Type on Wake Angle
6. Conclusions
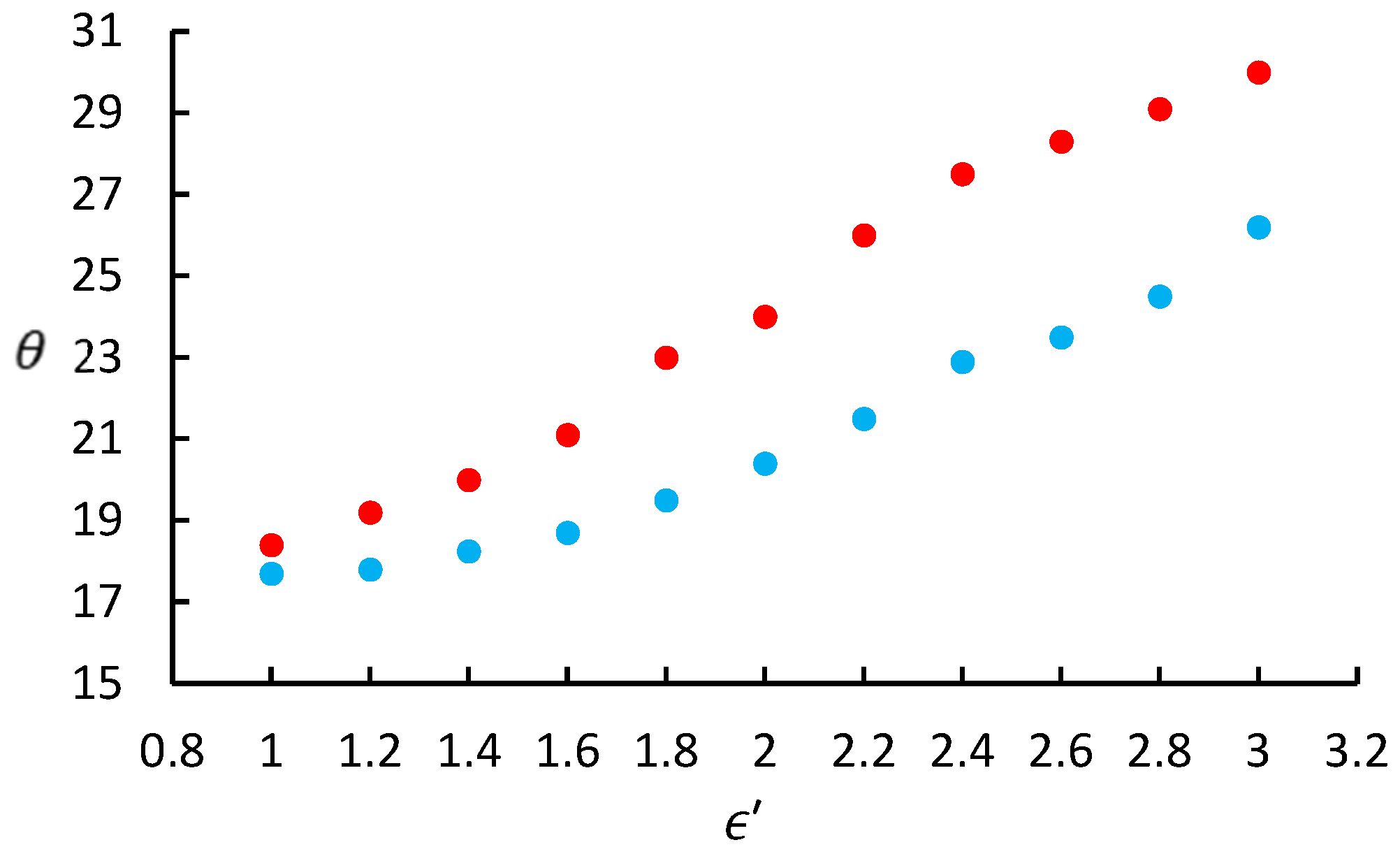
- The wake angle tends to decrease with Froude number and the downtrend has two stages. The wake angle is inversely proportional to Froude number and decreases dramatically after Froude number reaches a threshold, which is around 2.0 for Rankine source and is around 2.8 for Kelvin source.
- The wake angle tends to increase with source strength, meaning that ship size can affect the ship waves; the larger the ship size, the larger the wake angle generated will be.
- Because the gradient of source strength is lower than the gradient of Froude number, the wake angle change caused by ship size is not as visually obvious as the ship speed. Meanwhile, it is hard for source strength to increase the wake angle when the Froude number is large.
- With either the Kelvin source or Rankine source as a disturbance, the variation trends of wake angle are approximately identical with the effects of Froude number and source strength. However, a more accurate solution for nonlinear ship waves can be solved when the free surface flow passes Rankine source.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Fward speed of ship | n | Decay coefficient of radiation condition | |
| L | The vertical distance from source point to free surface | boundary value | |
| m, ĸ | Kelvin source strength and Rankine source strength | F(u) | The nonlinear system of equations |
| Dimensionless Kelvin source strength and Rankine source strength | u | The vector of unknowns in the nonlinear system | |
| Dimensionless Froude number | J(ut) | Jacobian matrix. | |
| Dimensionless velocity potential | Krylov subspace | ||
| Dimensionless free surface elevation | P | Preconditioner matrix | |
| Field points | r0 | Initial linear residual | |
| n | The downward pointing unit normal vector to the free surface | u0 | Initial value of unknowns |
| N,M | The number of columns and rows in the mesh | h | Small perturbation |
| The intervals in x- and y-directions | ABCD | Submatrices of preconditioner matrix | |
| x-derivatives and y-derivatives of velocity potential | I | Unit matrix | |
| x-derivatives and y-derivatives of free surface elevation | osr | Column matrix in the process of solving preconditioner matrix |
References
- Dias, F. Ship Waves and Kelvin. J. Fluid Mech. 2014, 746, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Michell, J.H. The Wave-Resistance of a Ship. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1898, 45, 106–123. [Google Scholar] [CrossRef]
- Sheremet, A.; Gravois, U.; Tian, M. Boat-Wake Statistics at Jensen Beach, Florida. J. Waterw. Port Coast. Ocean Eng. 2013, 139, 286–294. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Min, G.; Xie, Y. Simulation for the Ship Kelvin Wake with Narrow Components in SAR Image. In Proceedings of the 2021 Cross Strait Radio Science and Wireless Technology Conference (CSRSWTC 2021), Shenzhen, China, 13 October 2021; pp. 186–188. [Google Scholar]
- Pethiyagoda, R.; Moroney, T.J.; Macfarlane, G.J.; McCue, S.W. Spectrogram Analysis of Surface Elevation Signals Due to Accelerating Ships. Phys. Rev. Fluids 2021, 6, 104803. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, C.; Liu, J.; Xing, H.; Zhou, F.; Wang, D.; Long, X.; Wang, S.; Wang, W.; Shi, F. Identifying Ship-Wakes in a Shallow Estuary Using Machine Learning. Ocean Eng. 2022, 246, 110456. [Google Scholar] [CrossRef]
- Kelvin, L. On Ship Waves. Proc. Inst. Mech. Eng. 1887, 38, 409–434. [Google Scholar] [CrossRef]
- Lighthill, M.J. Waves in Fluids. J. Fluid Mech. 1978, 90, 605–607. [Google Scholar] [CrossRef]
- Rabaud, M.; Moisy, F. Ship Wakes: Kelvin or Mach Angle? Phys. Rev. Lett. 2013, 110, 214503.1–214503.5. [Google Scholar] [CrossRef]
- Verberck, B. Hydrodynamics: Wake Up. Nat. Phys. 2013, 9, 390. [Google Scholar] [CrossRef]
- Darmon, A.; Benzaquen, M.; Raphaël, E. Kelvin Wake Pattern at Large Froude Numbers. J. Fluid Mech. 2014, 738, R3. [Google Scholar] [CrossRef] [Green Version]
- Benzaquen, M.; Darmon, A.; Raphael, E. Wake Pattern and Wave Resistance for Anisotropic Moving Disturbances. Phys. Fluids 2014, 26, 092106. [Google Scholar] [CrossRef] [Green Version]
- Miao, S.; Liu, Y. Wave Pattern in the Wake of an Arbitrary Moving Surface Pressure Disturbance. Phys. Fluids 2015, 27, 122102. [Google Scholar] [CrossRef]
- Ma, C.; Zhu, Y.; Wu, H.; He, J.; Zhang, C.; Li, W.; Noblesse, F. Wavelengths of the Highest Waves Created by Fast Monohull Ships or Catamarans. Ocean Eng. 2016, 113, 208–214. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, H.; Ma, C.; He, J.; Li, W.; Wan, D.; Noblesse, F. Michell and Hogner Models of Far-Field Ship Waves. Appl. Ocean Res. 2017, 68, 194–203. [Google Scholar] [CrossRef]
- Wu, H.; Wu, J.; He, J.; Zhu, R.; Yang, C.J.; Noblesse, F. Wave Profile Along a Ship Hull, Short Far-Field Waves, and Broad Inner Kelvin Wake Sans Divergent Waves. Phys. Fluids 2019, 31, 47102. [Google Scholar] [CrossRef]
- Ellingsen, S.A. Ship Waves in the Presence of Uniform Vorticity. J. Fluid Mech. 2014, 742, R2. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ellingsen, S.A. Ship Waves on Uniform Shear Current at Finite Depth: Wave Resistance and Critical Velocity. J. Fluid Mech. 2016, 791, 539–567. [Google Scholar] [CrossRef] [Green Version]
- Li, Y. Wave-Interference Effects on Far-Field Ship Waves in the Presence of a Shear Current. J. Ship Res. 2018, 62, 37–47. [Google Scholar] [CrossRef]
- Wu, H.; He, J.; Liang, H.; Noblesse, F. Influence of Froude Number and Submergence Depth on Wave Patterns. Eur. J. Mech. B Fluids 2019, 75, 258–270. [Google Scholar] [CrossRef]
- Liang, H.; Chen, X. Asymptotic Analysis of Capillary–Gravity Waves Generated by a Moving Disturbance. Eur. J. Mech. 2018, 72, 624–630. [Google Scholar] [CrossRef]
- Grue, J. Ship Generated Mini-Tsunamis. J. Fluid Mech. 2017, 816, 142–166. [Google Scholar] [CrossRef] [Green Version]
- Liang, H.; Chen, X. Viscous Effects on the Fundamental Solution to Ship Waves. J. Fluid Mech. 2019, 879, 744–774. [Google Scholar] [CrossRef]
- Pethiyagoda, R.; Moroney, T.J.; Lustri, C.J.; McCue, S.W. Kelvin Wake Pattern at Small Froude Numbers. J. Fluid Mech. 2021, 915. [Google Scholar] [CrossRef]
- Havelock, T.H. Ship Waves: The Calculation of Wave Profiles. Proc. R. Soc. Lond. Ser. A Contain. Pap. A Math. Phys. Character 1932, 135, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Wehausen, J.V.; Laitone, E.V. Surface Waves; Springer: Berlin, Germany, 1960; pp. 446–778. ISBN 978-3-642-45944-3. [Google Scholar]
- Barbosa, E.; Daube, O. A Finite Difference Method for 3D Incompressible Flows in Cylindrical Coordinates. Comput. Fluids 2005, 34, 950–971. [Google Scholar] [CrossRef] [Green Version]
- Bettess, P.; Bettess, J.A. Analysis of Free Surface Flows Using Isoparametric Finite Elements. Int. J. Numer. Methods Eng. 1983, 19, 1675–1689. [Google Scholar] [CrossRef]
- Forbes, L.K. On the Effects of Non-Linearity in Free-Surface Flow about a Submerged Point Vortex. J. Eng. Math. 1985, 19, 139–155. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, R.; Gu, M.; Gu, X. Numerical Investigation on Steady Wave of High-Speed Ship with Transom Stern by Potential Flow and CFD Methods. Ocean Eng. 2022, 246, 110456. [Google Scholar] [CrossRef]
- Kan, Z.; Song, N.; Peng, H.; Chen, B. Extension of Complex Step Finite Difference Method to Jacobian-Free Newton–Krylov Method. J. Comput. Appl. Math. 2022, 399, 113732. [Google Scholar] [CrossRef]
- Ma, C.; Scheichl, R.; Dodwell, T. Novel Design and Analysis of Generalized Finite Element Methods Based on Locally Optimal Spectral Approximations. SIAM J. Numer. Anal. 2022, 60, 244–273. [Google Scholar] [CrossRef]
- Bystricky, L.; Pålsson, S.; Tornberg, A.K. An Accurate Integral Equation Method for Stokes Flow with Piecewise Smooth Boundaries. BIT Numer. Math. 2021, 61, 309–335. [Google Scholar] [CrossRef]
- Gu, M.; Zhu, R.; Yang, X.; Wang, H.; Shi, K. Numerical Investigation on Evaluating Nonlinear Waves Due to an Air Cushion Vehicle in Steady Motion by a Higher Order Desingularized Boundary Integral Equation Method. Ocean Eng. 2022, 246, 110598. [Google Scholar] [CrossRef]
- Forbes, L.K. An Algorithm for 3-Dimensional Free-Surface Problems in Hydrodynamics. J. Comput. Phys. 1989, 82, 330–347. [Google Scholar] [CrossRef]
- Pethiyagoda, R. Mathematical and Computational Analysis of Kelvin Ship Wave Patterns. Ph.D. Thesis, Queensland University of Technology, Brisbane, Australia, 2016. [Google Scholar]
- Scullen, D.C. Accurate Computation of Steady Nonlinear Free-Surface Flows. Ph.D. Thesis, The University of Adelaide, Adelaide, Australia, 1998. [Google Scholar]
- Brown, P.N.; Saad, Y. Hybrid Krylov Methods for Nonlinear Systems of Equations. SIAM J. Sci. Stat. Comput. 1990, 11, 450–481. [Google Scholar] [CrossRef]
- Saad, Y.; Schultz, M.H. GMRES: A Generalized Minimal Residual Algorithm for Solving Nonsymmetric Linear Systems. SIAM J. Sci. Stat. Comput. 1986, 7, 856–869. [Google Scholar] [CrossRef] [Green Version]
- Knoll, D.A.; Keyes, D.E. Jacobian-Free Newton-Krylov Methods: A Survey of Approaches and Applications. J. Comput. Phys. 2004, 193, 357–397. [Google Scholar] [CrossRef] [Green Version]
- Dembo, R.S.; Eisenstat, S.C.; Steihaug, T. Inexact Newton Methods. SIAM J. Numer. Anal. 1982, 19, 400–408. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Cai, M.; Wang, J.; Liu, C. Numerical Simulation of the Kelvin Wake Patterns. Appl. Sci. 2022, 12, 6265. https://doi.org/10.3390/app12126265
Sun X, Cai M, Wang J, Liu C. Numerical Simulation of the Kelvin Wake Patterns. Applied Sciences. 2022; 12(12):6265. https://doi.org/10.3390/app12126265
Chicago/Turabian StyleSun, Xiaofeng, Miaoyu Cai, Jingkui Wang, and Chunlei Liu. 2022. "Numerical Simulation of the Kelvin Wake Patterns" Applied Sciences 12, no. 12: 6265. https://doi.org/10.3390/app12126265