
Linear Proportional-Integral-Differential-Robustified Continuous-Time Optimal Predictive Control for a Class of Nonlinear Systems

Abstract
:1. Introduction
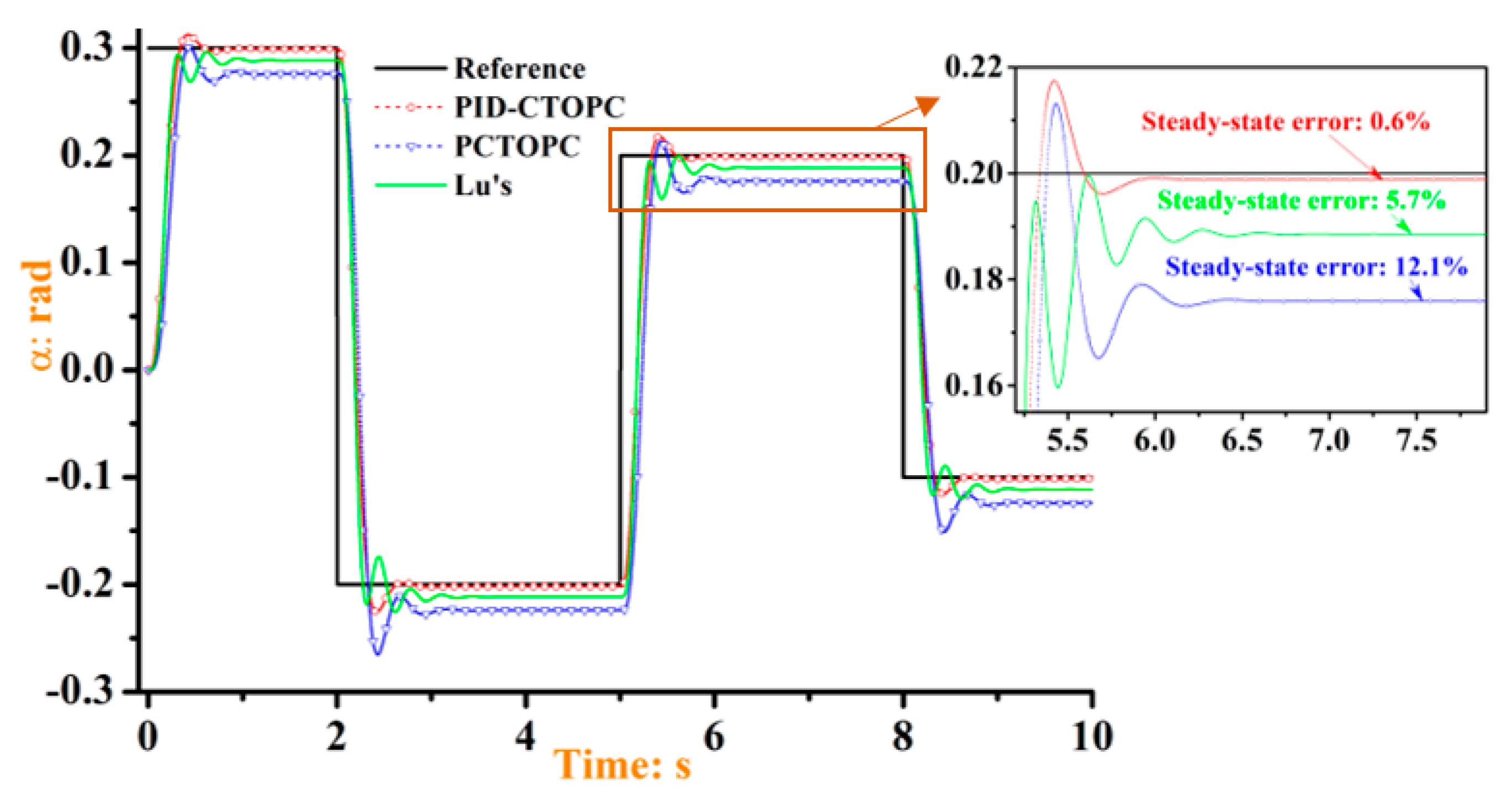
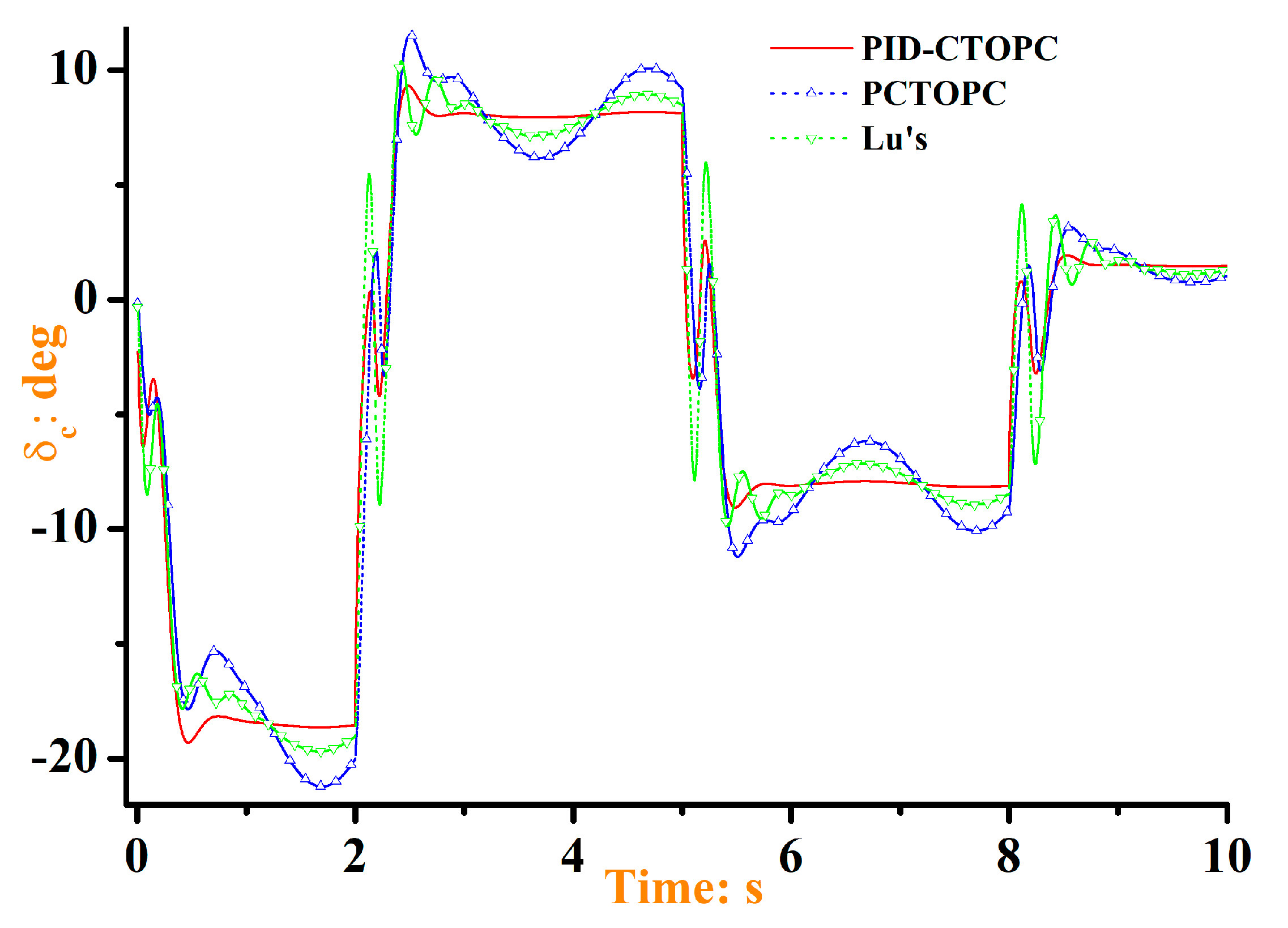
- A closed-loop steady-state tracking error reduction approach is proposed in the field of CTOPC. The accumulative tracking errors, which are integrated into a new error state with PID structure, are considered in the proposed PID-CTOPC approach such that tracking errors within the operation envelop of the closed-loop system can be minimized compared with the PCTOPC and the Lu’s approach, which only consider the current tracking errors.
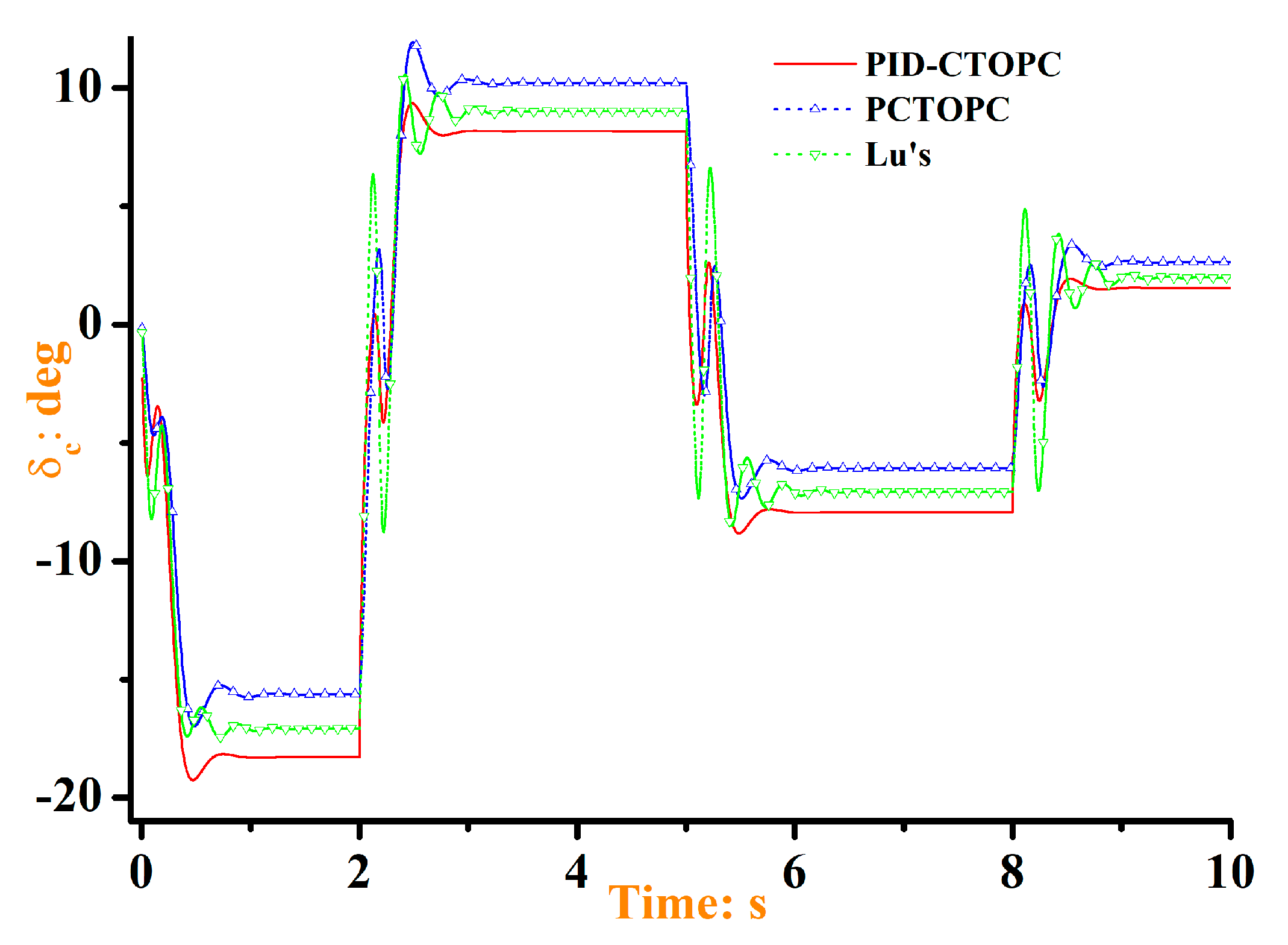
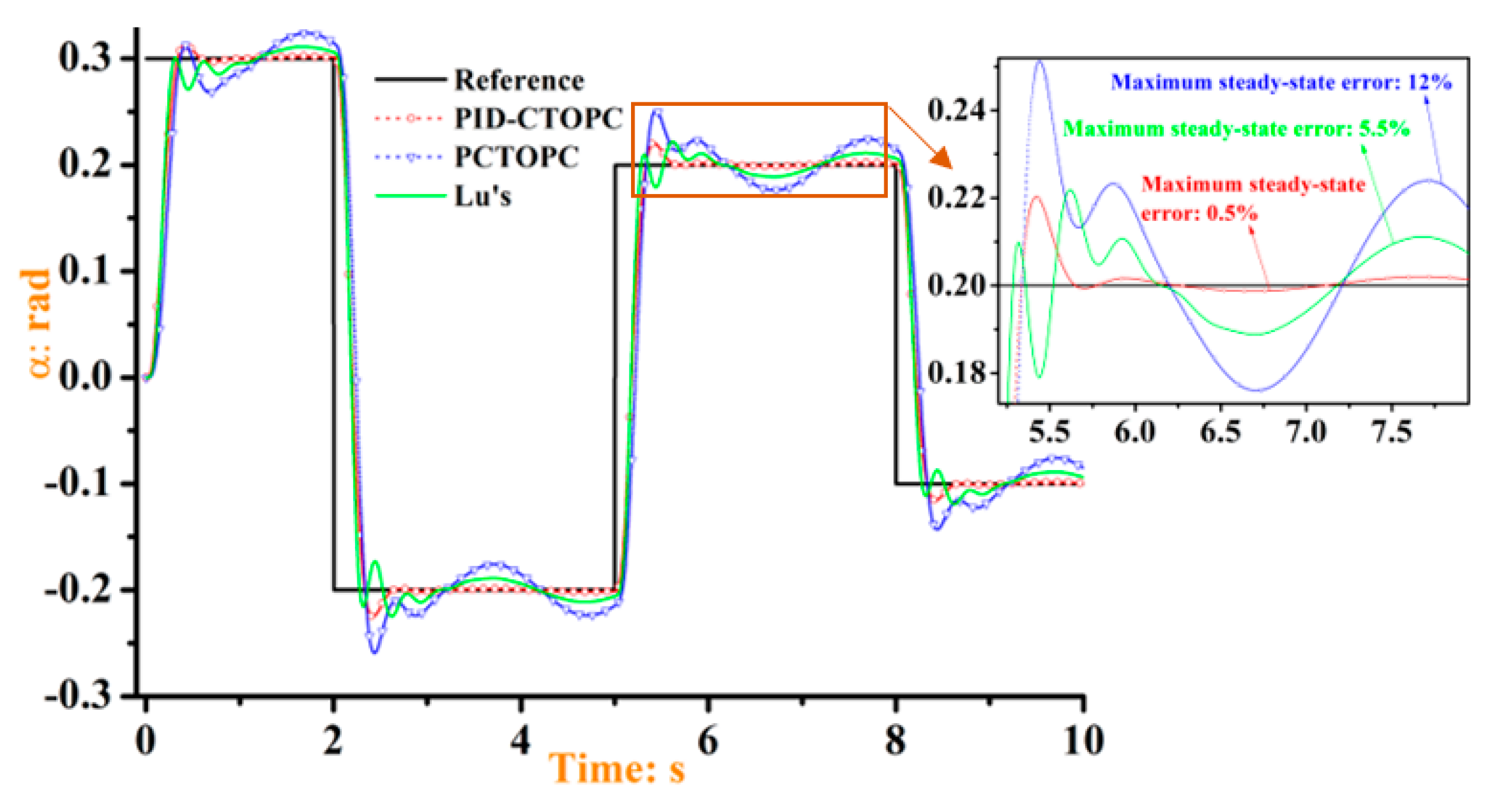
- Robustness of the closed-loop system is significantly enhanced. In the proposed PID-CTOPC approach, current, accumulative, and derivative tracking errors are minimized simultaneously such that reduction of input fluctuation, output overshoot, and steady-state tracking error can also be derived in contrast with the PCTOPC and the Lu’s approach in the presence of unknown disturbances.
2. Preliminaries
- (A1)
- The zero dynamics are stable.
- (A2)
- All the states , are available.
- (A3)
- The system output and the prescribed reference are sufficiently many times continuously differentiable relative to time .
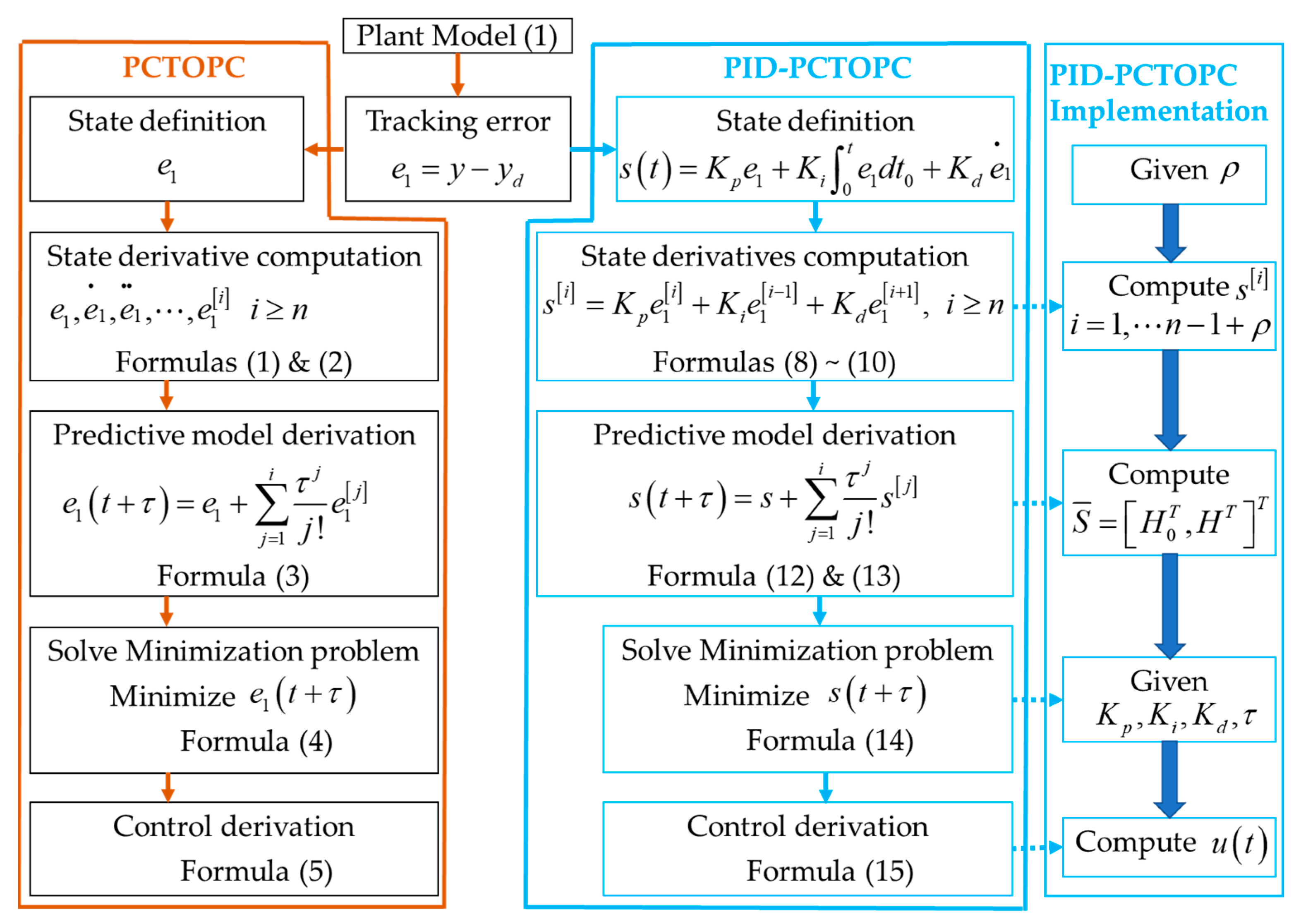
3. The PID-CTOPC Approach
3.1. Stabilization Model
3.2. Controller Design
3.3. Stability Analysis
3.4. Connections and Comparisons between the PCTOPC and the PID-CTOPC
4. Model Simulation Results
4.1. Case Study 1: Superioities Validation
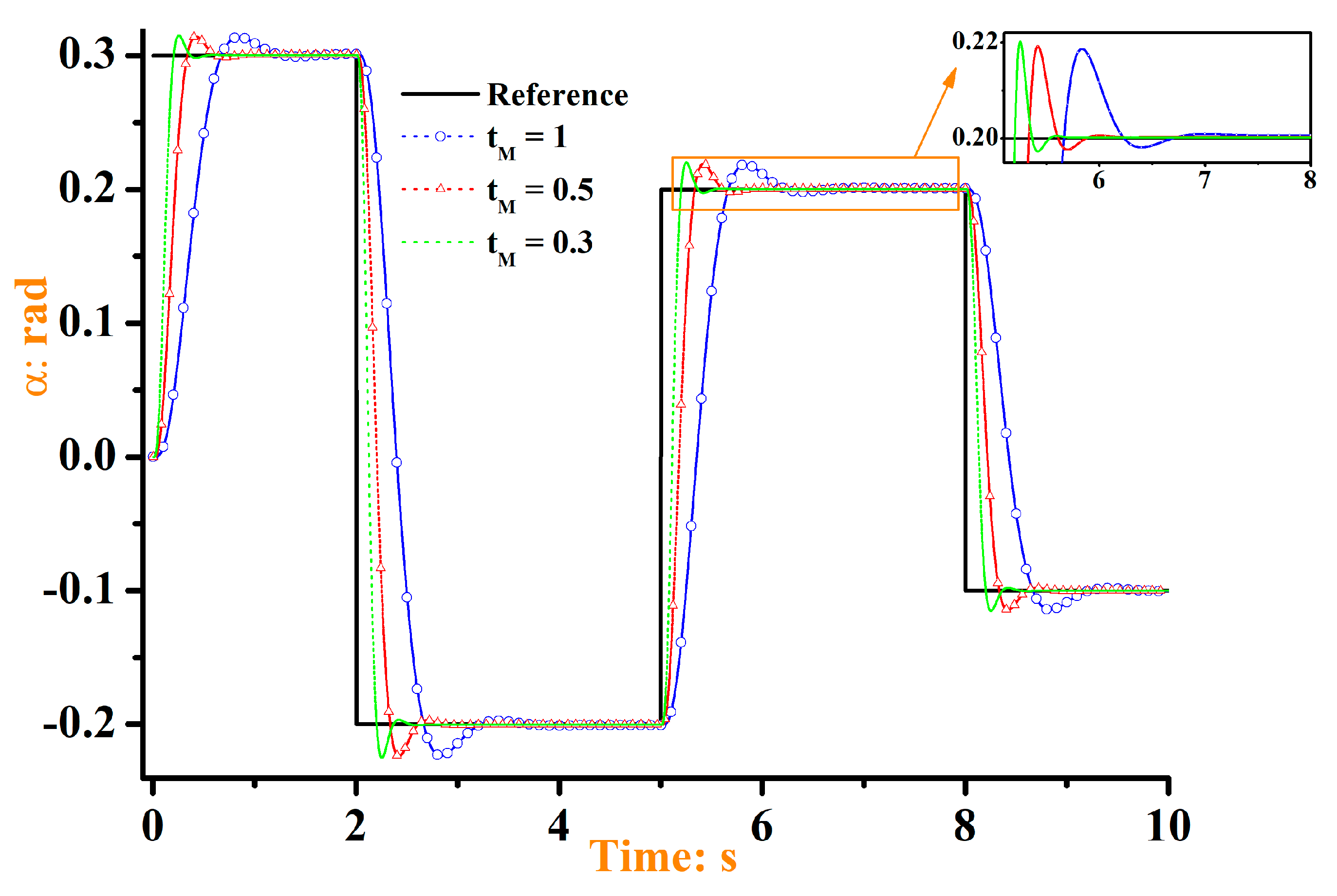
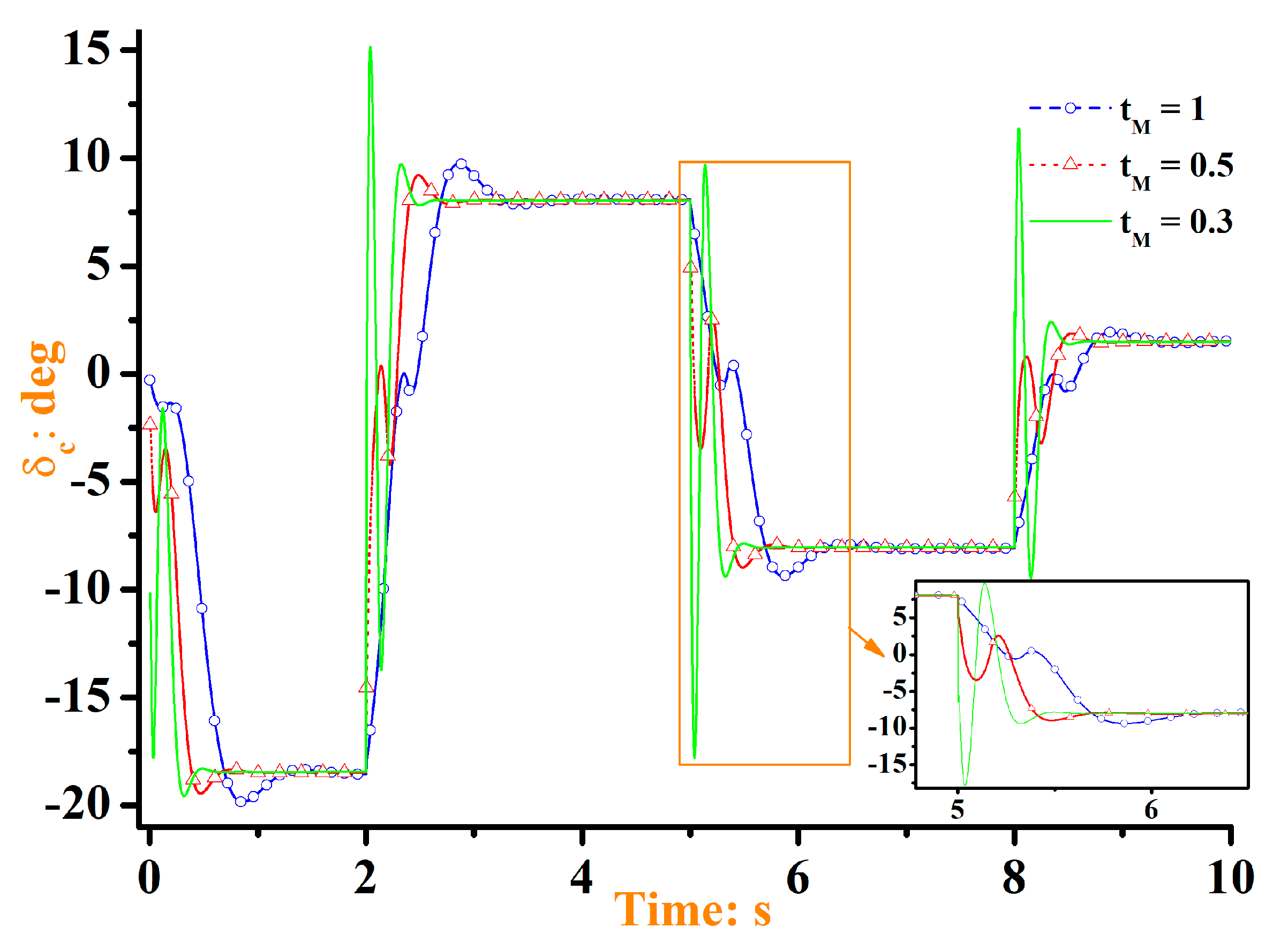
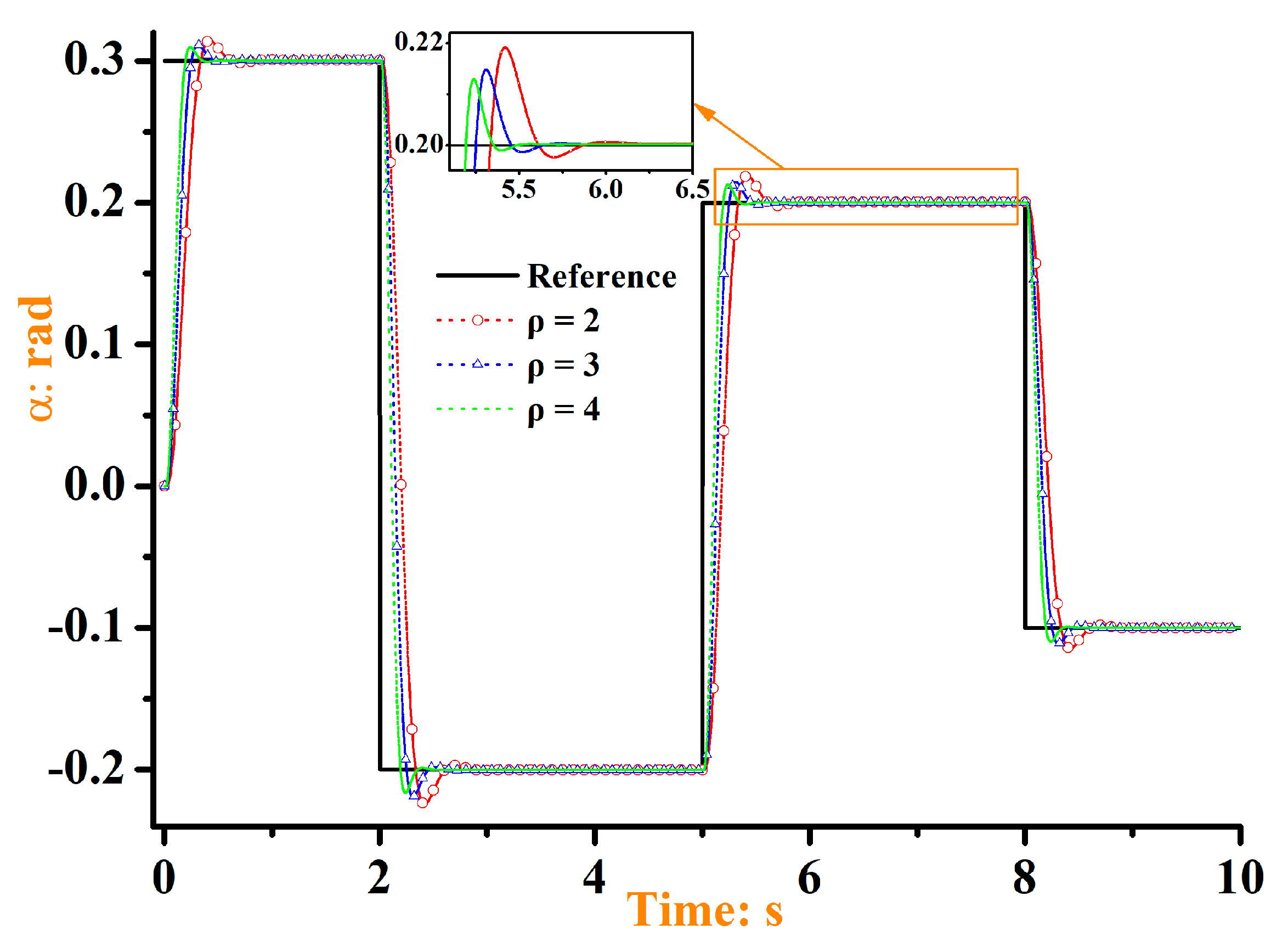
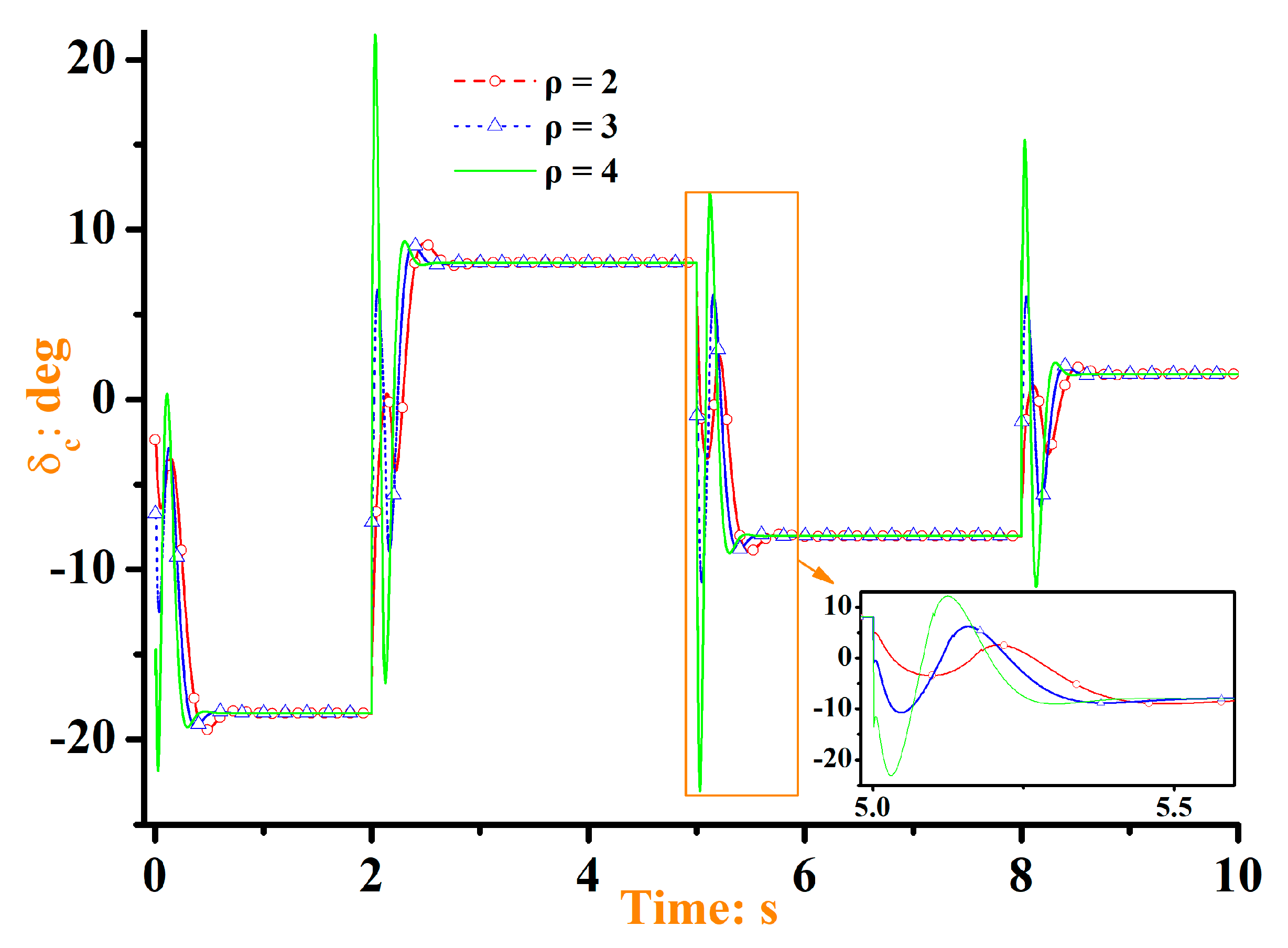
4.2. Case Study 2: Control Parameter Selection Validation
5. Discussion
6. Conclusions
- A new system error state with PID structure is presented such that the current, the accumulative, and the derivative tracking errors are all considered and then minimized in the optimization problem simultaneously.
- Due to the minimization of the accumulative and derivative tracking errors in the proposed optimal predictive controller, robustness of the closed-loop system against the constant and the time-varying disturbances is significantly enhanced and the system input fluctuations are also degraded compared with the system using the controllers based upon the PCTOPC and the Lu’s approaches.
- Though the proposed PID-CTOPC have achieved satisfactory control performance, there are some further studies that can be expected in the future. First, the proposed approach is expected to be validated experimentally. Second, the control parameters are required to be adjusted adaptively by using tracking errors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Dobroskok, N.A.; Vtorov, V.B. Robust Pole Assignment in a Problem of State Observer-based Modal Control. In Proceedings of the 2021 IV International Conference on Control in Technical Systems (CTS), Saint Petersburg, Russia, 21–23 September 2021; pp. 30–33. [Google Scholar]
- Hideaki, H.; Kenshiro, K.; Shu, Y. Simple Design Method of Two-Degree-of-Freedom PID Position Controller Based on Pole-Zero-Assignment for Linear Servo Motors. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 1800–1805. [Google Scholar]
- Ahmet, E.; Aziz, K. Feedback linearization control of a quadrotor. In Proceedings of the 2021 5th International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 21–23 October 2021; pp. 287–290. [Google Scholar]
- Adamiak, K. Time-Variant Discrete-Time Sliding Mode Control. In Proceedings of the 2021 22nd International Carpathian Control Conference (ICCC), Velké Karlovice, Czech Republic, 31 May–1 June 2021; pp. 1–5. [Google Scholar]
- Adamu, A.; Sirin, A. Adaptive Cruise Control: A Model Reference Adaptive Control Approach. In Proceedings of the 2020 24th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 8–10 October 2020; pp. 904–908. [Google Scholar]
- Tan, X.; Wang, H.M.; Peng, W.W.; Liang, N.; Zhang, W. Finite-Time Disturbance Attenuation Tracking Control of Flexible-Joint Robots Based on CTSMC. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 604–609. [Google Scholar]
- Chen, Y.Y.; Wang, Y.; Dong, Q.; Zhu, G.M.; Feng, J.J.; Xiao, F.Y. Robust adaptive back-stepping control for nonlinear systems with unknown backlash-like hysteresis. In Proceedings of the 2021 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 8–11 August 2021; pp. 554–559. [Google Scholar]
- Chen, W.H.; Balance, D.J.; Gawthrop, P.J. Optimal control of nonlinear systems: A predictive control approach. Automatica 2003, 39, 633–641. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.L.; Sun, L.; Sun, G.; Li, Y.Y.; Zhu, B. Generalized predictive tracking control of spacecraft attitude based on hyperbolic tangent extended state observer. Adv. Space Res. 2020, 66, 335–344. [Google Scholar] [CrossRef]
- Sun, G.; Chen, J.L.; Zhu, B. Generalized predictive control for spacecraft attitude based on adaptive fuzzy estimator. J. Aerosp. Eng. 2017, 30, 04017024. [Google Scholar] [CrossRef]
- Liu, X.D.; Zhang, C.H.; Zhang, K.L. Nonlinear predictive high order sliding mode control for permanent magnet synchronous motor drive system. J. Math. Comput. Sci. 2016, 16, 402–411. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.A.; Shi, Q.; Wei, Y.J.; Wang, M.W.; He, Z.J.; He, L. A Generalized Predictive Control Approach for Angle Tracking of Steer-by-Wire System. In Proceedings of the 60th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Tokyo, Japan, 8–10 September 2021; pp. 272–275. [Google Scholar]
- Yang, J.; Cui, H.Y.; Li, S.H.; Zolotas, A. Optimized active disturbance rejection control for DC-DC buck converters with uncertainties using a reduced-order GPI observer. IEEE Trans. Circuits Syst. I 2018, 65, 832–841. [Google Scholar] [CrossRef] [Green Version]
- Errouissi, R.; Al-Durra, A.; Muyeen, S.M. A robust continuous-time MPC of a dc-dc boost converter interfaced with a grid-connected photovoltaic system. IEEE J. Photovolt. 2016, 6, 1619–1629. [Google Scholar] [CrossRef] [Green Version]
- Cui, J.L.; Chen, Z.; Shen, J.W.; Shen, S.Q.; Liu, Y.G. Robust Cascaded Nonlinear Generalized Predictive Control with Sliding Mode Disturbance Observer for Permanent Magnet Synchronous Hub Motor. In Proceedings of the 2020 4th CAA International Conference on Vehicular Control and Intelligence (CVCI), Hangzhou, China, 8–2 December 2020; pp. 276–281. [Google Scholar]
- Merabet, A.; Labib, L.; Ghias, A.M.Y.M. Robust model predictive control for photovoltaic inverter system with grid fault ride-through capability. IEEE Trans. Smart Grid 2018, 9, 5699–5709. [Google Scholar] [CrossRef]
- Errouissi, R.; Muyeen, S.M.; Al-Durra, A.; Leng, S.Y. Experimental validation of a robust continuous nonlinear model predictive control based grid-interlinked photovoltaic inverter. IEEE Trans. Ind. Electron. 2016, 63, 4495–4505. [Google Scholar] [CrossRef] [Green Version]
- Aissou, R.; Rekioua, T.; Rekioua, D.; Tounzi, A. Application of nonlinear predictive control for charging the battery using wind energy with permanent magnet synchronous generator. Int. J. Hydrogen Energy 2016, 41, 20964–20973. [Google Scholar] [CrossRef]
- Ouari, K.; Rekioua, T.; Ouhrouche, M. Real time simulation of nonlinear generalized predictive control for wind energy conversion system with nonlinear observer. ISA Trans. 2014, 53, 76–84. [Google Scholar] [CrossRef]
- Gouta, H.; SaÏd, S.H.; Barhoumi, N.; M’Sahli, F. Generalized predictive control for a coupled four tank MIMO system using a continuous-discrete time observer. ISA Trans. 2017, 67, 280–292. [Google Scholar] [CrossRef] [PubMed]
- Gouta, H.; SaÏd, S.H.; Barhoumi, N.; M’Sahli, F. Model-based predictive and backstepping controllers for a state coupled four-tank system with bounded control inputs: A comparative study. J. Franklin Inst. 2015, 352, 4864–4889. [Google Scholar] [CrossRef]
- Wang, D.Z.; Zhao, D.X.; Gong, M.D.; Yang, B. Nonlinear Predictive Sliding Mode Control for Active Suspension System. Shock Vib. 2018, 2018, 8194305. [Google Scholar] [CrossRef] [Green Version]
- Jing, S.; Errouissi, R.; Al-Durra, A.; Boiko, I. Stabilization of artificial gas-lift process using nonlinear predictive generalized minimum variance control. In Proceedings of the 2016 American control conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 4169–4174. [Google Scholar]
- Krid, M.; Benamar, F.; Lenain, R. A new explicit dynamic path tracking controller using generalized predictive control. Int. J. Control Autom. Syst. 2016, 15, 303–314. [Google Scholar] [CrossRef]
- Filho, J.M.M.; Lucet, E.; Filliat, D. Real-Time Distributed Receding Horizon Motion Planning and Control for Mobile Multi-Robot Dynamic Systems. In Proceedings of the International Conference on Robotics and Automation (ICRA), Singapore, 29 May–1 June 2017; pp. 657–663. [Google Scholar]
- Khoukhi, B.; Tadjine, M.; Boucherit, M.S. Nonlinear continuous-time generalized predictive control of solar power plant. Int. J. Simul. Multidiscip. Des. Optim. 2015, 6, A3. [Google Scholar] [CrossRef] [Green Version]
- Invernizzi, D.; Panza, S.; Lovera, M. Robust Tuning of Geometric Attitude Controllers for Multirotor Unmanned Aerial Vehicles. J. Guid. Control Dyn. 2020, 43, 1332–1343. [Google Scholar] [CrossRef]
- Ghiglino, P.; Forshaw, J.L.; Lappas, V.J. Online evolutionary swarm algorithm for self-tuning unmanned flight control laws. J. Guid. Control Dyn. 2015, 38, 772–782. [Google Scholar] [CrossRef]
- Yoo, C.H. Active control of aeroelastic vibrations for electromechanical missile fin actuation systems. J. Guid. Control Dyn. 2017, 40, 3296–3303. [Google Scholar] [CrossRef]
- Zhang, R.D.; Wu, S.; Gao, F.R. Improved pi controller based on predictive functional control for liquid level regulation in a coke fractionation tower. J. Process Control 2014, 24, 125–132. [Google Scholar] [CrossRef]
- Yu, H.; Guan, Z.; Chen, T.W.; Yamamoto, T. Design of data-driven PID controllers with adaptive updating rules. Automatica 2020, 121, 109185. [Google Scholar] [CrossRef]
- Lu, P. Nonlinear Predictive Controllers for Continuous Systems. J. Guid. Control Dyn. 1994, 17, 553–560. [Google Scholar] [CrossRef]
- Lu, P. Optimal Predictive Control of Continuous Nonlinear Systems. Int. J. Control 1995, 62, 633–649. [Google Scholar] [CrossRef]
- Lu, P. Constrained Tracking Control of Nonlinear Systems. Syst. Control Lett. 1996, 27, 305–314. [Google Scholar] [CrossRef]
- Singh, S.N.; Steinberg, M.; DiGirolamo, R.D. Nonlinear Predictive Control of Feedback Linearizable Systems and Flight Control System Design. J. Guid. Control Dyn. 1995, 18, 1023–1028. [Google Scholar] [CrossRef]
- Lu, P.; Pierson, B.L. Aircraft Terrain Following Based on a Nonlinear Continuous Predictive Control Approach. J. Guid. Control Dyn. 1995, 18, 817–823. [Google Scholar] [CrossRef]
- Lee, I.H.; Bang, H. A Cooperative Line-of-Sight Guidance Law for a Three-Dimensional Phantom Track Generation using Unmanned Aerial Vehicles. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 227, 897–915. [Google Scholar] [CrossRef]
- Lu, P. Entry Guidance and Trajectory Control for Reusable Launch Vehicle. J. Guid. Control Dyn. 1997, 20, 143–149. [Google Scholar] [CrossRef]
- Lu, P.; Hanson, J.M. Entry Guidance for the X-33 Vehicle. J. Spacecr. Rocket. 1998, 35, 342–349. [Google Scholar] [CrossRef]
- Brinda, V.; Dasgupta, S. Guidance Law for an Air-Breathing Launch Vehicle Using Predictive Control Concept. J. Guid. Control Dyn. 2006, 29, 1460–1463. [Google Scholar] [CrossRef]
- Khan, M.A.; Lu, P. New Techniques for Nonlinear Control of Aircraft. J. Guid. Control Dyn. 1994, 17, 1055–1060. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L.; Anthony, T.C.; Andrews, S.F. Nonlinear Predictive Control of Spacecraft. J. Guid. Control Dyn. 1997, 20, 1096–1103. [Google Scholar] [CrossRef]
- Bang, H.; Oh, C.S. Predictive Control for the Attitude Maneuver of a Flexible Spacecraft. Aerosp. Sci. Technol. 2004, 8, 443–452. [Google Scholar] [CrossRef]
- Panchal, B.; Kolhe, J.P.; Talole, S.E. Robust predictive control of a class of nonlinear systems. J. Guid. Control Dyn. 2014, 37, 1437–1445. [Google Scholar] [CrossRef]
- Panchal, B.; Mate, N.; Talole, S.E. Continuous-time predictive control-based integrated guidance and control. J. Guid. Control Dyn. 2017, 40, 1579–1595. [Google Scholar] [CrossRef]
- Fromion, V.; Scorletti, G.; Ferreres, G. Nonlinear performance of a PI controlled missile: An explanation. Int. J. Robust Nonlinear Control 2015, 9, 485–518. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach Name | Parameter Value |
|---|---|
| PID-CTOPC | , , , , |
| PCTOPC | , |
| Lu’s | , , , |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Ang, H.; Li, Q. Linear Proportional-Integral-Differential-Robustified Continuous-Time Optimal Predictive Control for a Class of Nonlinear Systems. Appl. Sci. 2022, 12, 5446. https://doi.org/10.3390/app12115446
Wu G, Ang H, Li Q. Linear Proportional-Integral-Differential-Robustified Continuous-Time Optimal Predictive Control for a Class of Nonlinear Systems. Applied Sciences. 2022; 12(11):5446. https://doi.org/10.3390/app12115446
Chicago/Turabian StyleWu, Guilin, Haisong Ang, and Qingxi Li. 2022. "Linear Proportional-Integral-Differential-Robustified Continuous-Time Optimal Predictive Control for a Class of Nonlinear Systems" Applied Sciences 12, no. 11: 5446. https://doi.org/10.3390/app12115446