
Optimization Workflows for Linking Model-Based Systems Engineering (MBSE) and Multidisciplinary Analysis and Optimization (MDAO)


Abstract
:1. Introduction
1.1. Motivation
1.2. Problem Statement
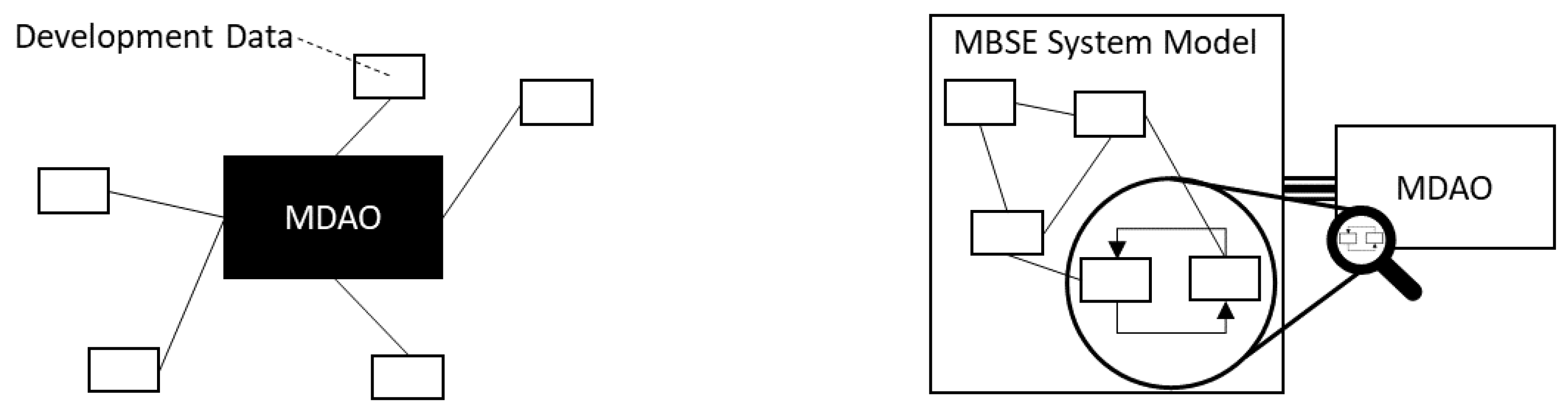
- high initial efforts due to distributed data
- high reconfiguration efforts
- black box behavior due to lack of formalization

1.3. Contribution
- A novel approach (Section 2) is developed to link MDAO in MBSE system models. The novelty lies in reusing existing development data. For this, data from the system specification and models from design (Section 2.2.1) and test activities (Section 2.2.2) are reused. Utilizing an analogy (Section 2.2.3), design and test activities are mapped to system optimization (Section 2.3). Reusing development data from design and test activities reduces the initial effort of MDAO.
- For the first time, the MDAO problem is formalized in the MBSE system model as an optimization workflow. The purpose is to resolve the MDAO black box behavior and reduce the reconfiguration effort (Section 3.1, Section 3.2 and Section 3.3).
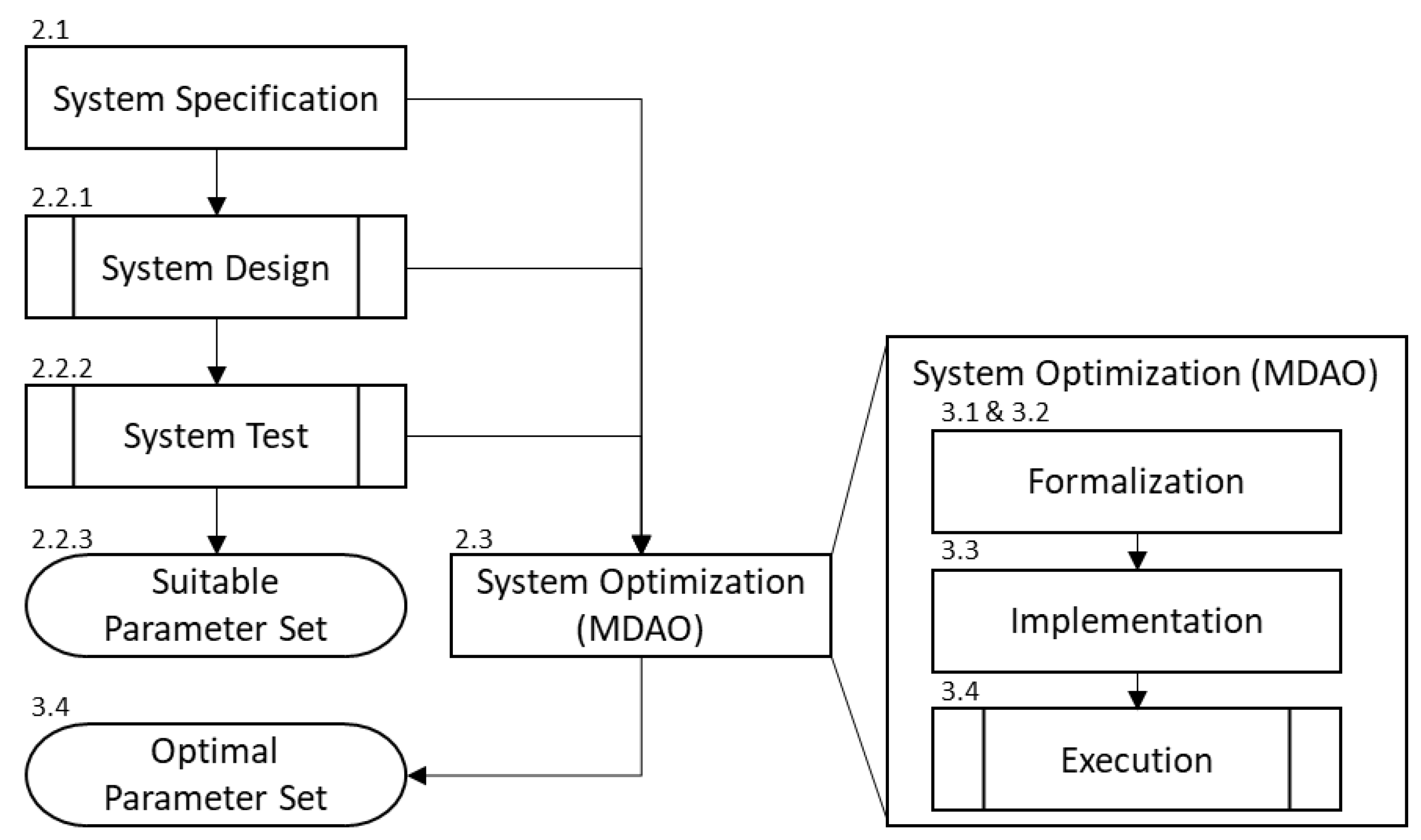
2. Materials and Methods
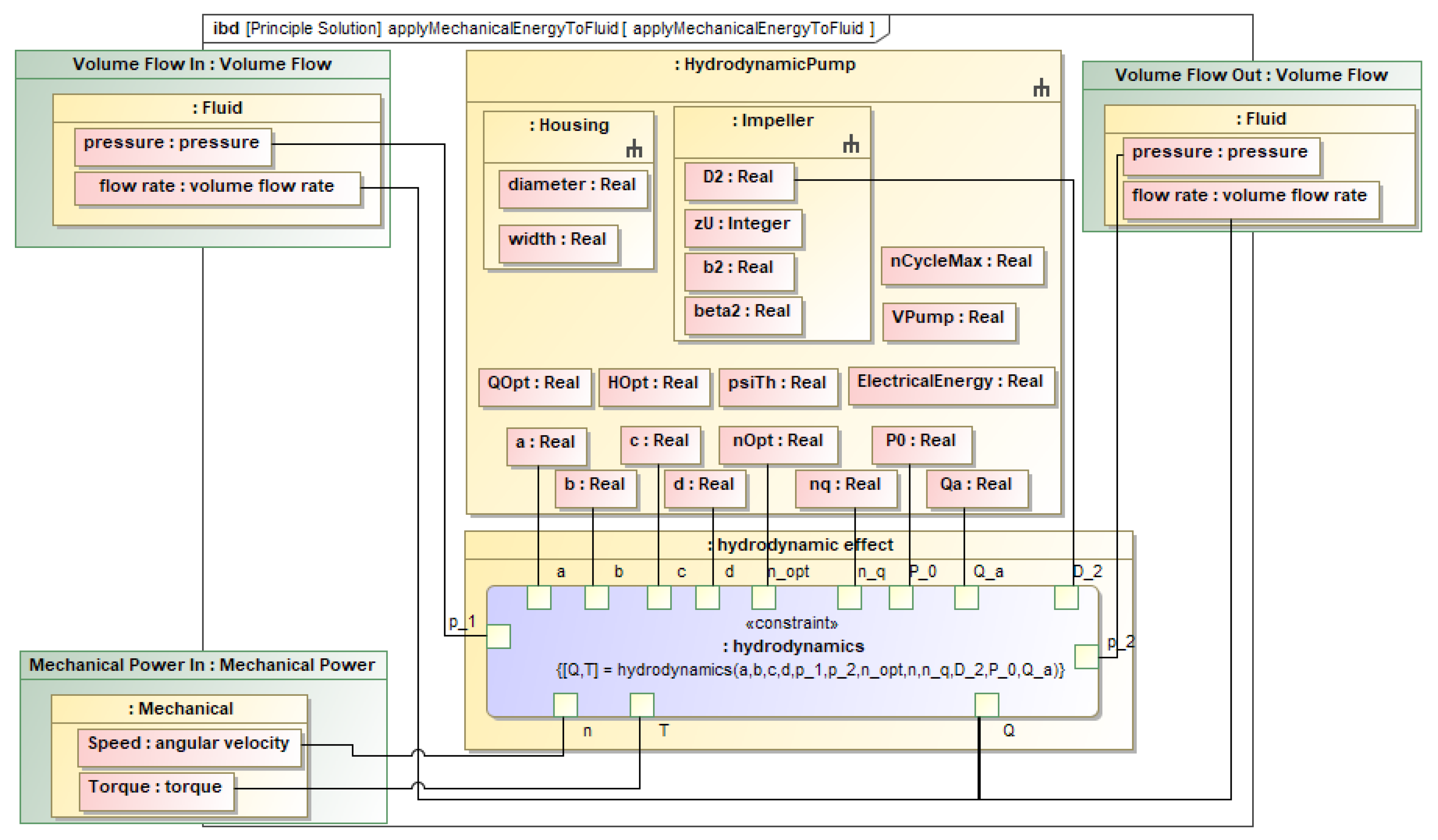
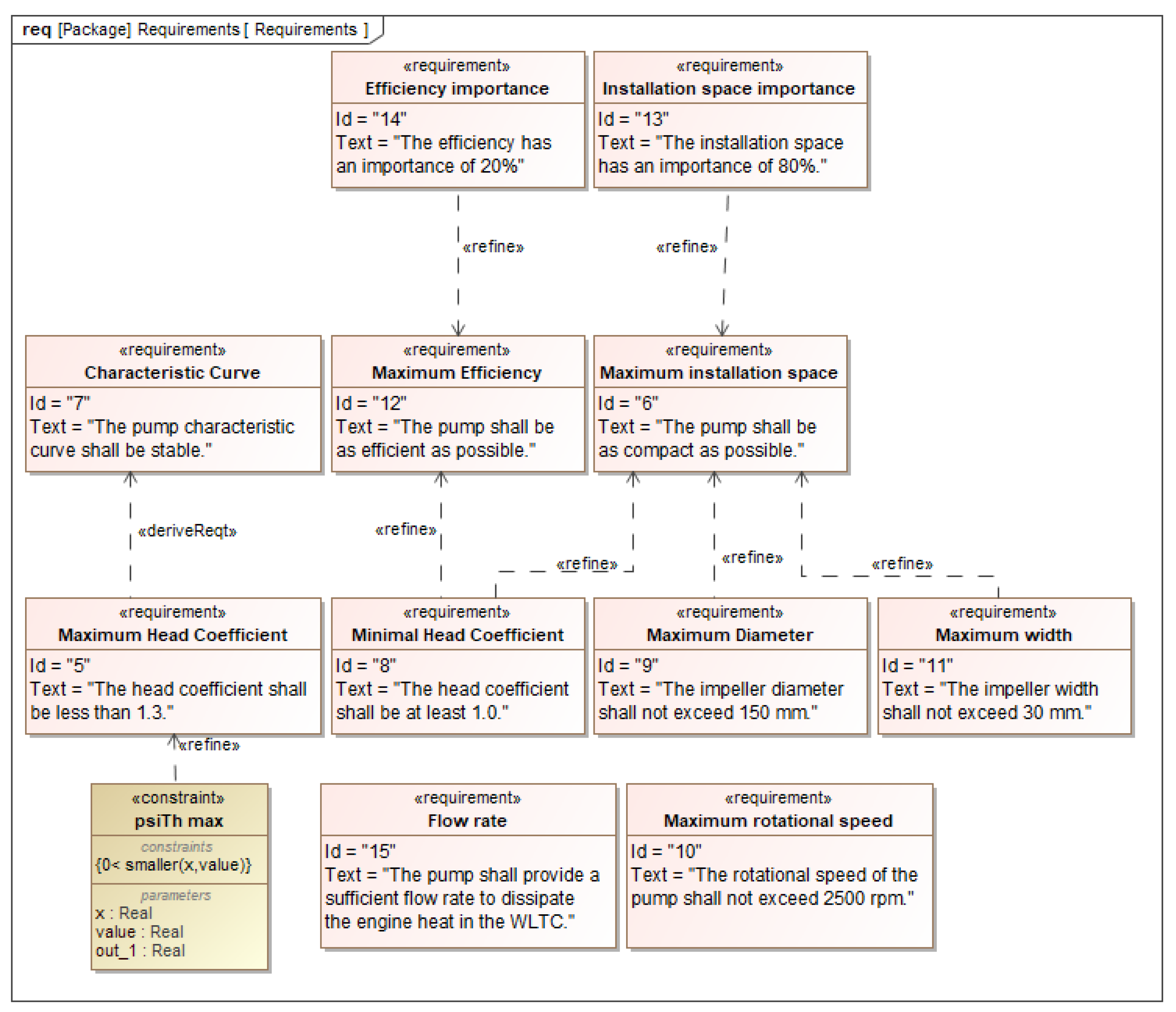
2.1. System Specification
2.2. System Design and Test
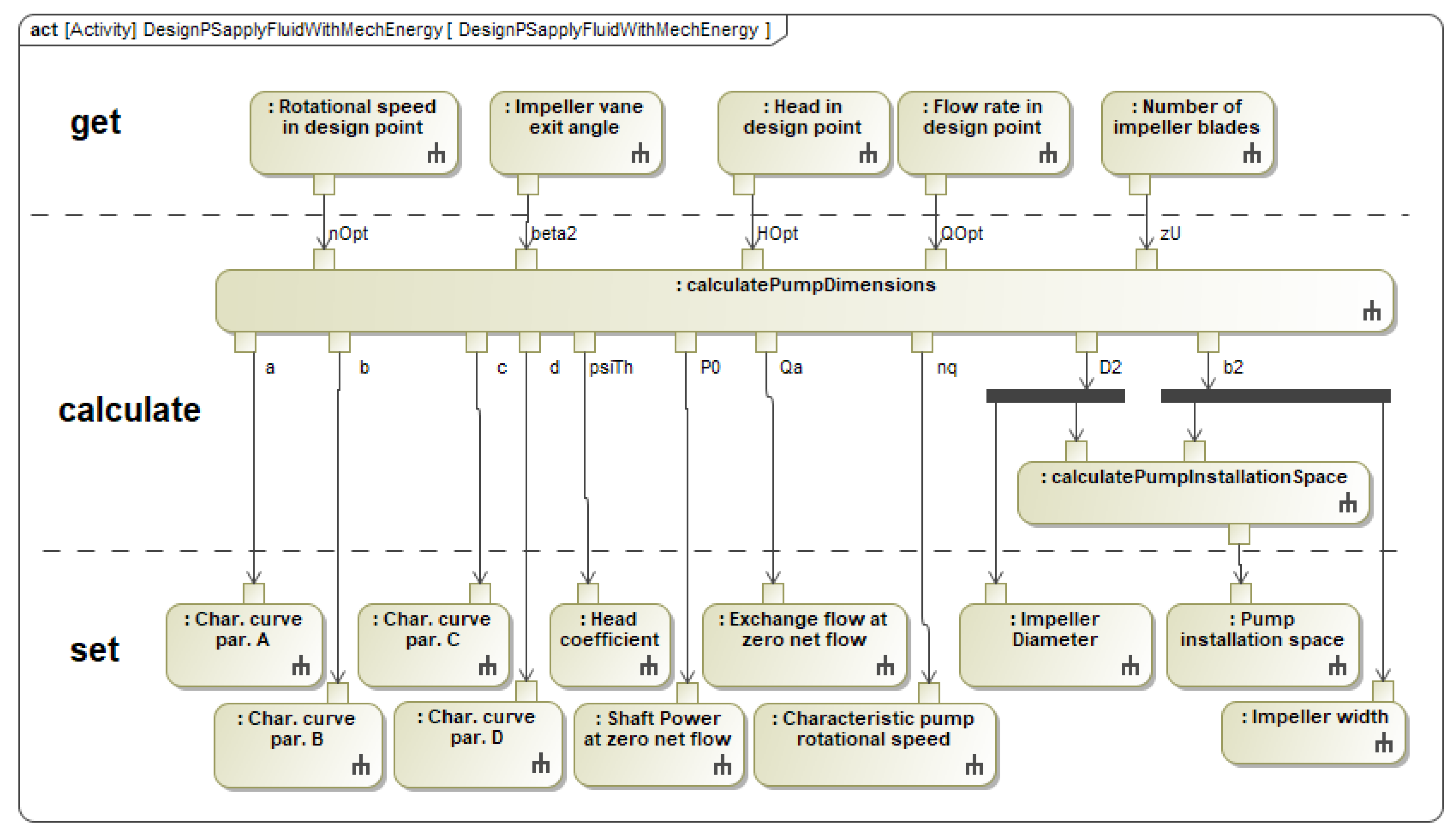
2.2.1. Design Workflow
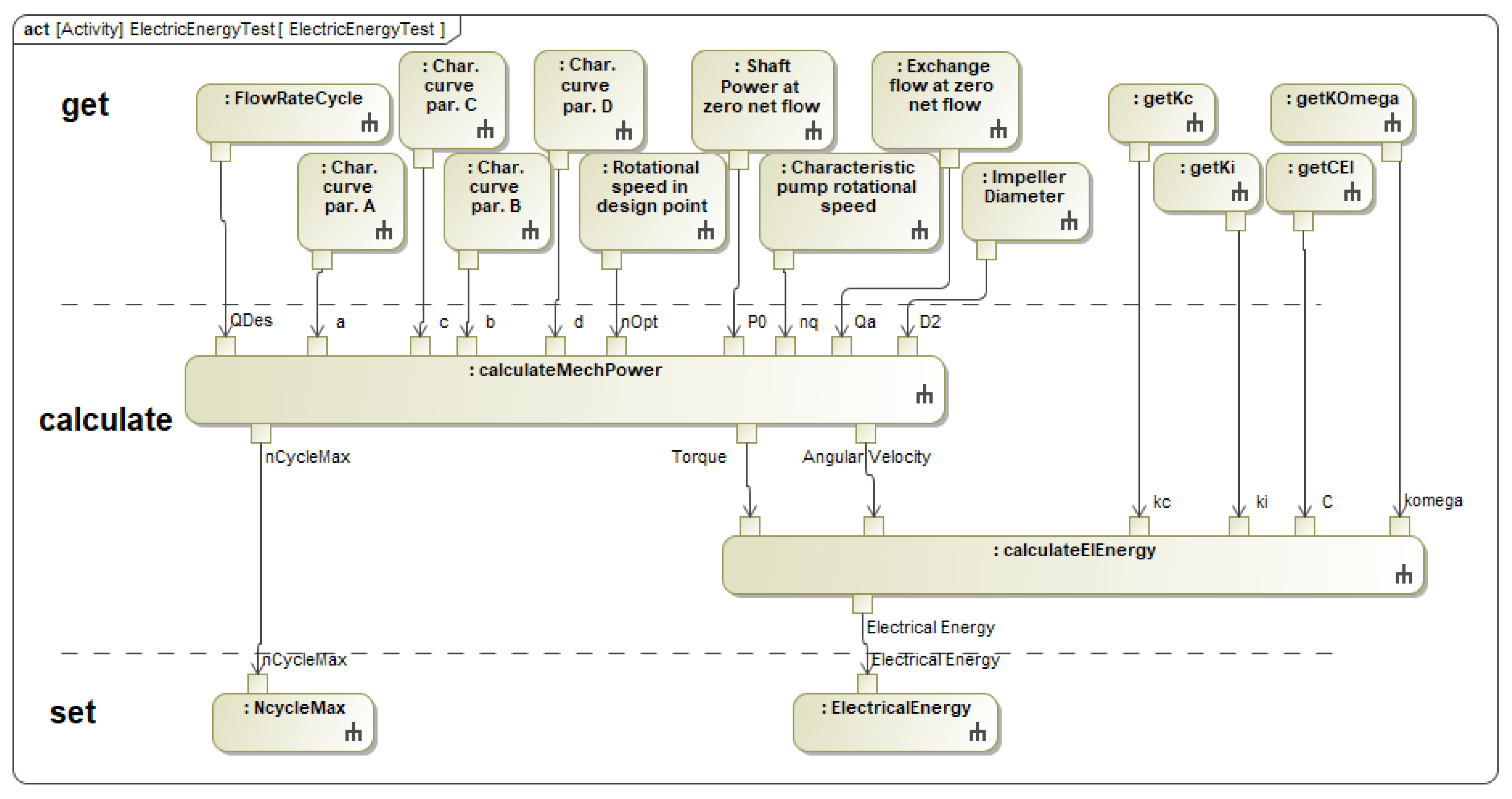
- Rotational speed , flow rate and head in the best efficiency design point indexed as Opt
- Impeller vane exit angle
- Number of impeller blades
- Parameter values of the pump characteristic curve
- Head coefficient
- Impeller diameter and width
- Pump installation space
- Shaft power at zero net flow rate
- Exchange flow rate at zero net flow rate
- Characteristic pump rotational speed
2.2.2. Test Workflow
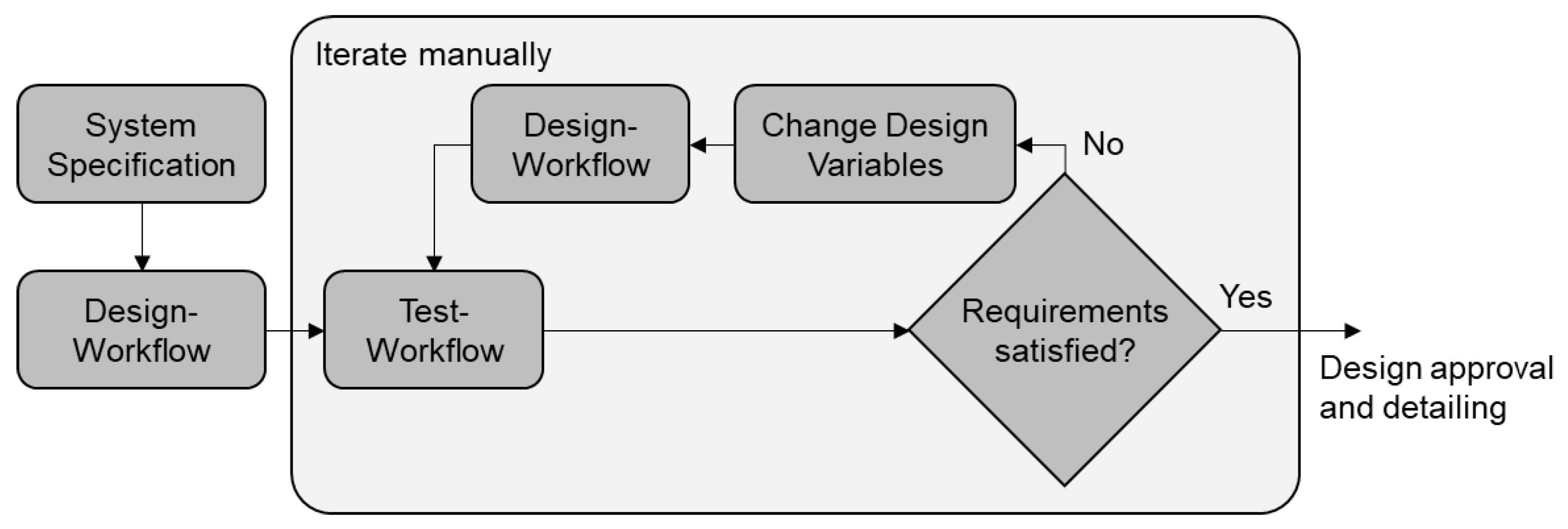
2.2.3. Design and Test Process
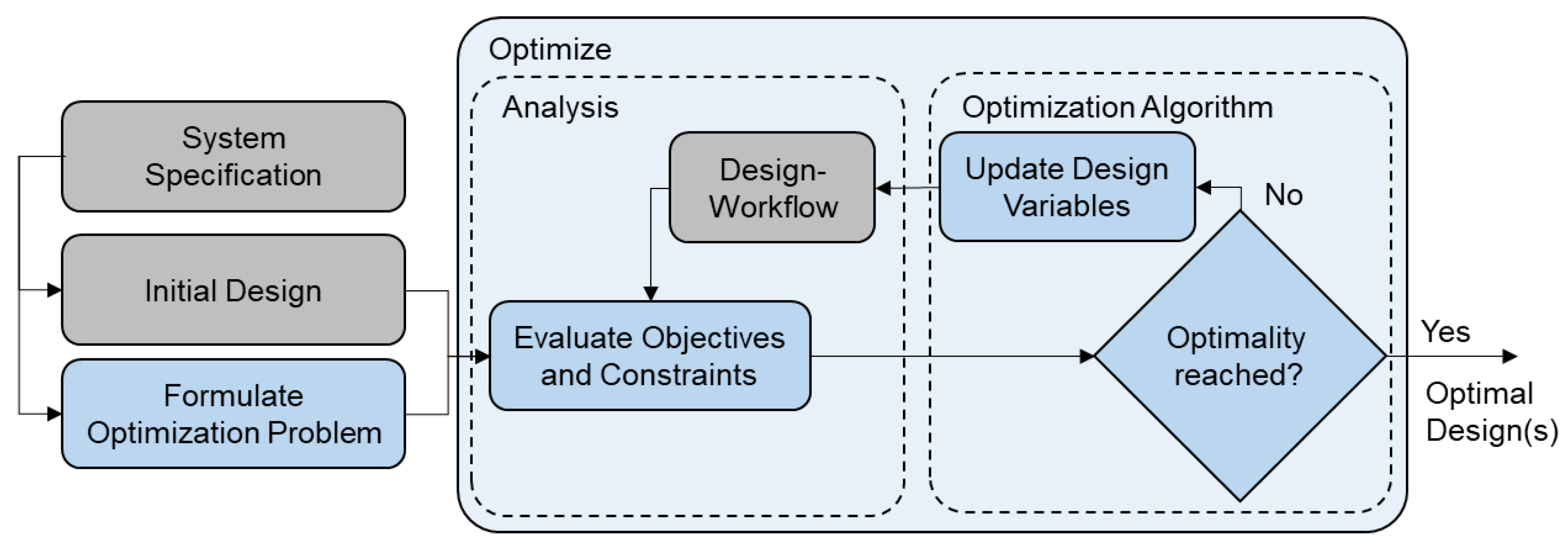
2.3. System Optimization
3. Results: Optimization Workflow
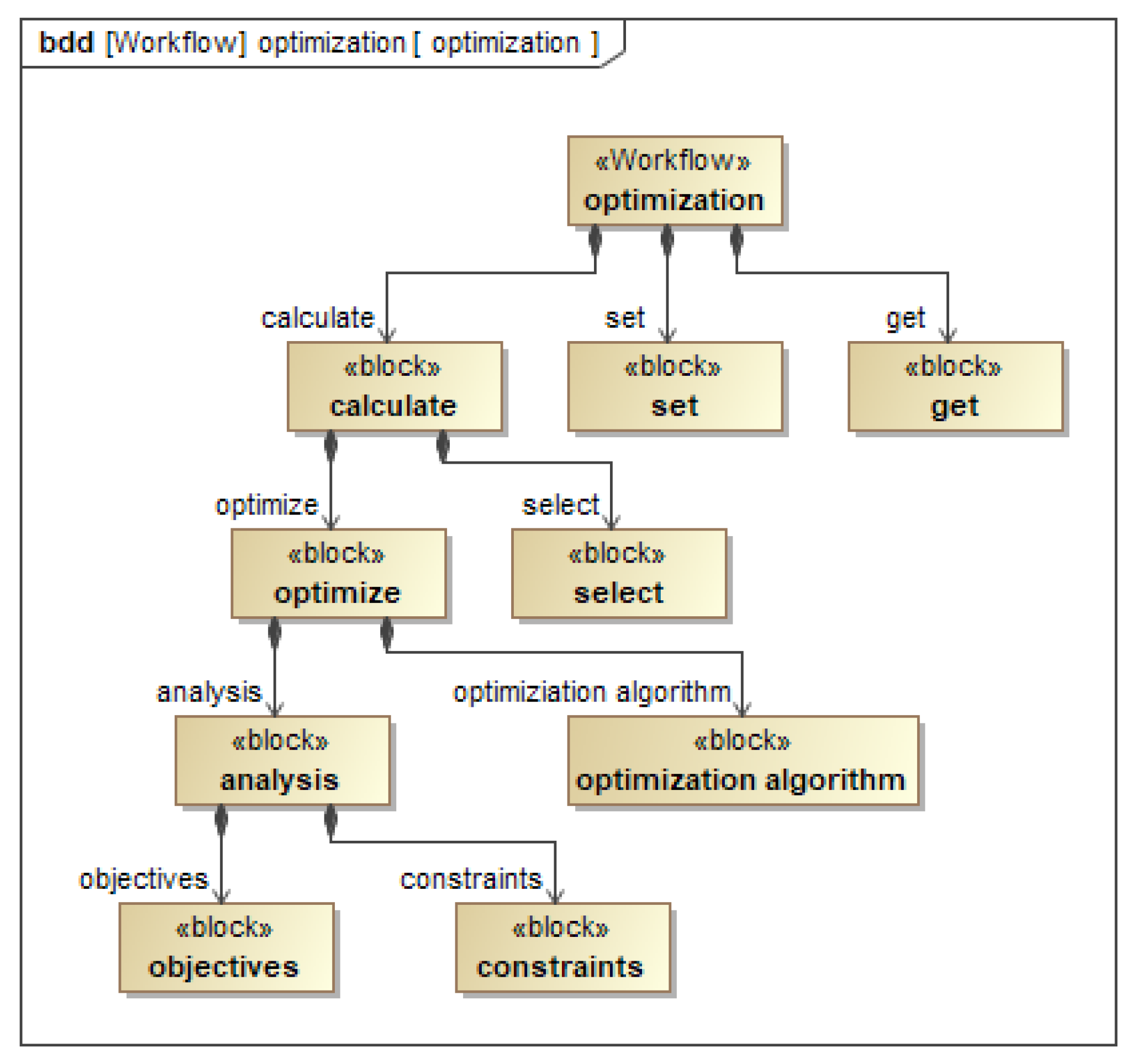
3.1. Workflow Architecture
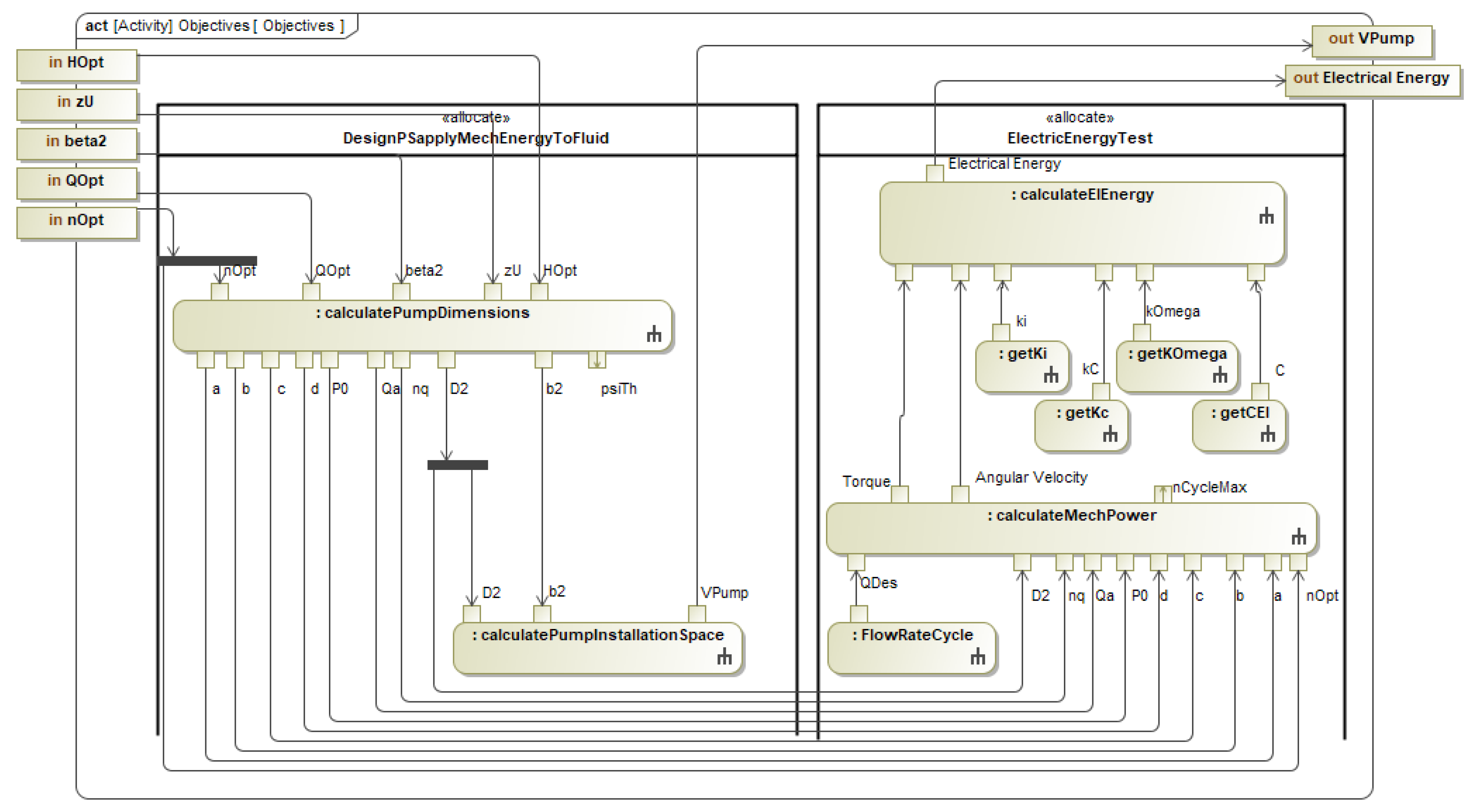
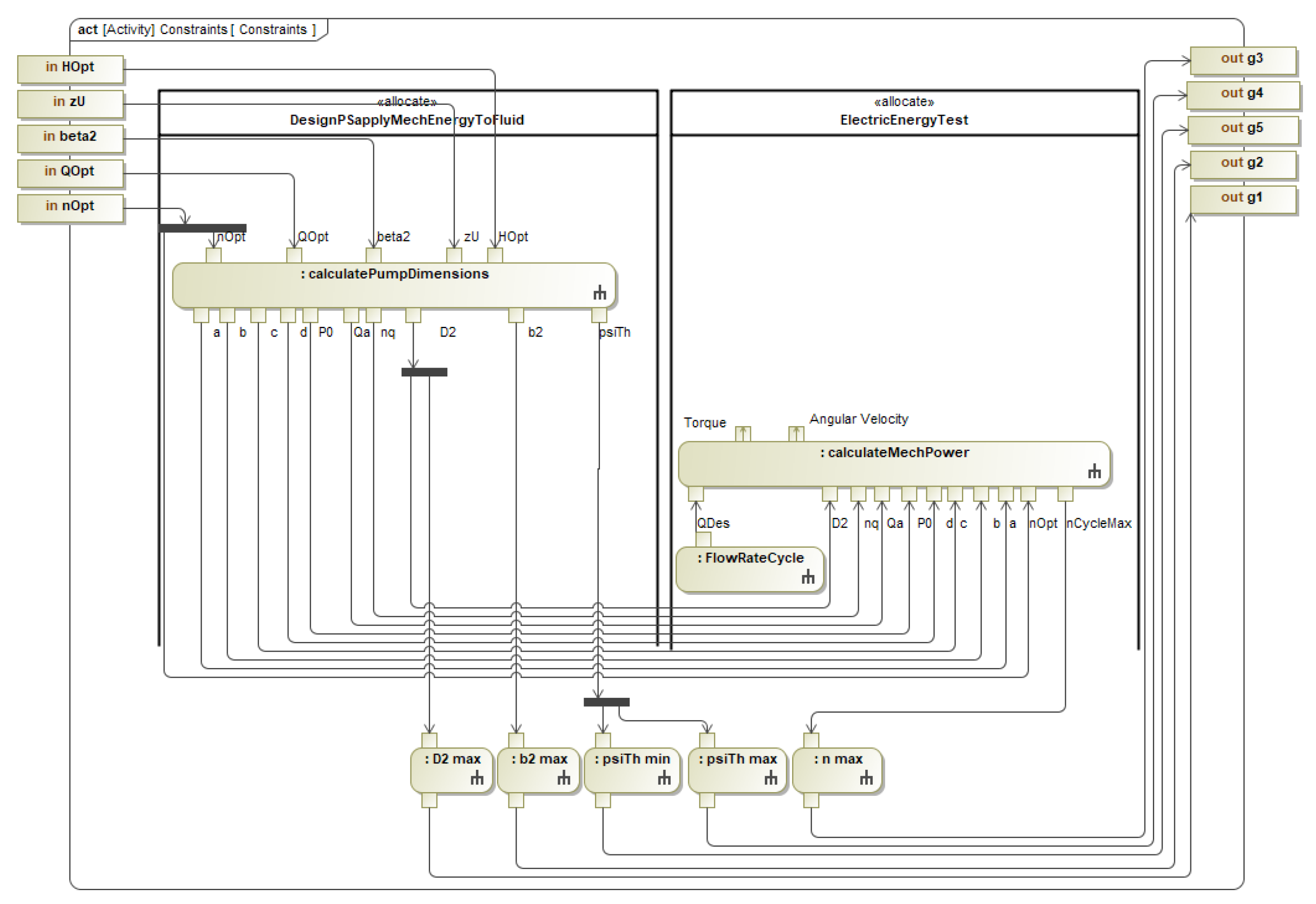
3.2. Internal Behavior
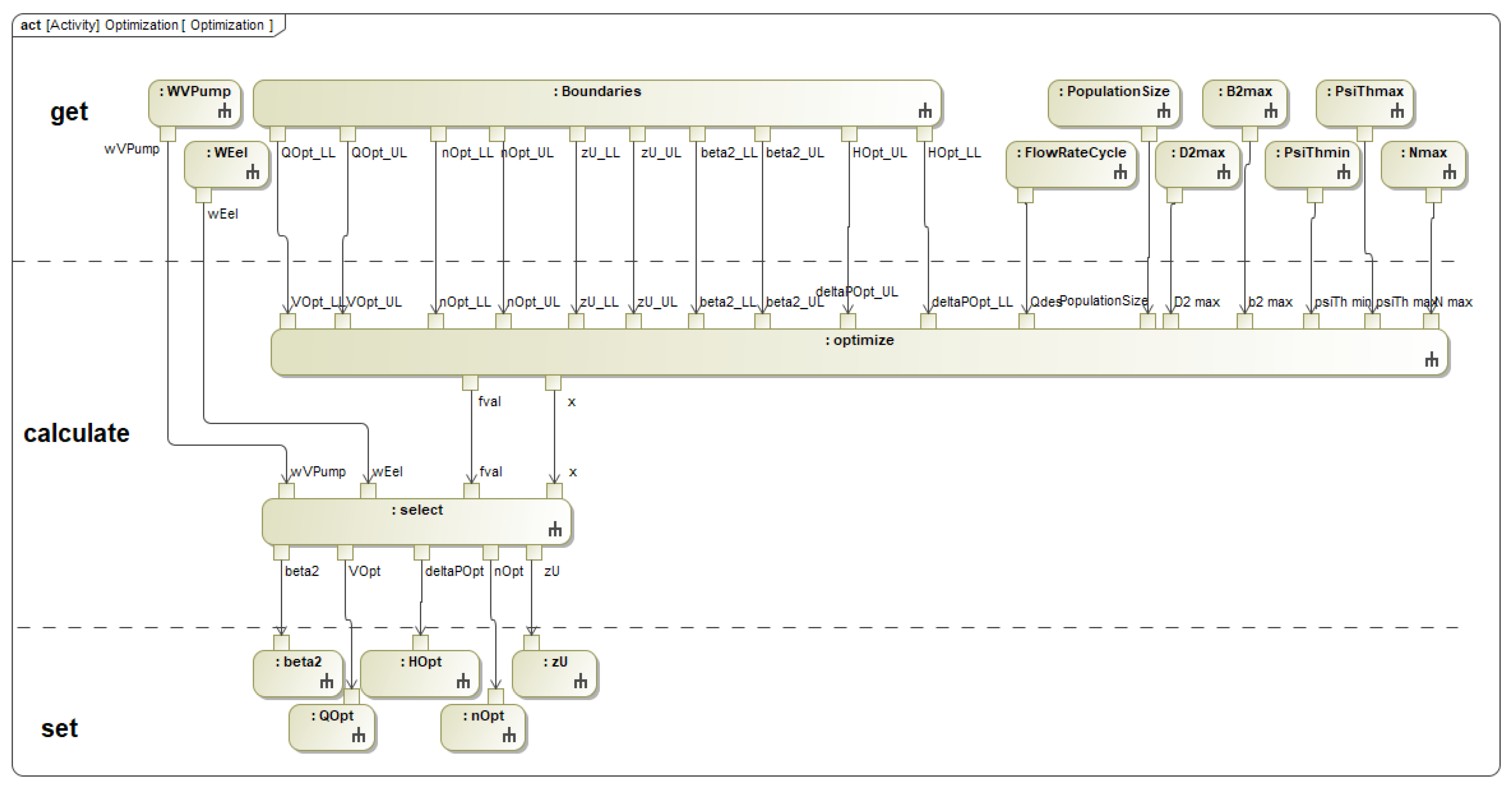
3.3. Executable Behavior
3.4. Numerical Results
4. Discussion
Limitations
5. Related Work
6. Summary and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Impeller vane exit angle | |
| Pump efficiency | |
| Head coefficient | |
| Minimum head coefficient specified by requirements | |
| Maximum head coefficient specified by requirements | |
| Angular velocity of the pump impeller | |
| a | Parameter of the pump characteristic curve |
| b | Parameter of the pump characteristic curve |
| Impeller width | |
| Maximum impeller width specified by requirements | |
| c | Parameter of the pump characteristic curve |
| Electric motor loss coefficient | |
| C&C-A | Contact and channel approach |
| CPS | Cyber-physical system |
| CSMOP | Constraint satisfaction multicriteria optimization problem |
| d | Parameter of the pump characteristic curve |
| Impeller diameter | |
| Maximum impeller diameter specified by requirements | |
| Consumed electrical energy in the flow rate cycle | |
| Objective function | |
| Constraint function | |
| Head | |
| Head in the best efficiency design point | |
| Electric motor loss coefficient | |
| Electric motor loss coefficient | |
| Electric motor loss coefficient | |
| MBSE | Model-Based Systems Engineering |
| MDAO | Multidisciplinary Analysis and Optimization |
| Maximum required pump speed in the flow rate cycle | |
| Maximum pump speed specified by requirements | |
| Rotational speed in the best efficiency design point | |
| Characteristic pump rotational speed | |
| OEM | Original equipment manufacturer |
| Shaft power at zero net flow rate | |
| Exchange power losses of the pump | |
| Losses of the electric motor | |
| Hydrodynamic power of the pump | |
| Mechanical power losses of the pump | |
| Disk friction power losses of the pump | |
| Pump total shaft power | |
| PIDO | Process integration and design optimization |
| Flow rate | |
| Exchange flow rate at zero net flow rate | |
| Flow rate in the best efficiency design point | |
| Score of electric energy consumption | |
| Total score | |
| Score of pump installation space | |
| SoI | System of interest |
| SSO | Single source of truth |
| SysML | Systems modeling language |
| Pump shaft torque | |
| Pump installation space | |
| Weight of electric energy consumption | |
| Weight of pump installation space | |
| Design variable | |
| Number of impeller blades |
References
- Fahl, J.; Hirschter, T.; Wöhrle, G.; Albers, A. Proposing a Specification Structure for Complex Products in Model-based Systems Engineering (MBSE). Proc. Des. Soc. 2021, 1, 2481–2490. [Google Scholar] [CrossRef]
- Grebe, U.D.; Hick, H.; Rothbart, M.; von Helmolt, R.; Armengaud, E.; Bajzek, M.; Kranabitl, P. Challenges for Future Automotive Mobility. In Systems Engineering for Automotive Powertrain Development, 1st ed.; Hick, H., Küpper, K., Sorger, H., Eds.; Springer International Publishing, Imprint Springer: Cham, Switzerland, 2021; pp. 3–30. ISBN 978-3-31999-629-5. [Google Scholar]
- Drave, I.; Rumpe, B.; Wortmann, A.; Berroth, J.; Hoepfner, G.; Jacobs, G.; Spuetz, K.; Zerwas, T.; Guist, C.; Kohl, J. Modeling mechanical functional architectures in SysML. In Proceedings of the 23rd ACM/IEEE International Conference on Model Driven Engineering Languages and Systems, Virtual Event, Canada, 16–23 October 2020; pp. 79–89. [Google Scholar] [CrossRef]
- Gunes, V.; Peter, S.; Givargis, T.; Vahid, F. A Survey on Concepts, Applications, and Challenges in Cyber-Physical Systems. KSII TIIS 2014, 8, 4242–4268. [Google Scholar] [CrossRef] [Green Version]
- Chen, H. Applications of Cyber-Physical System: A Literature Review. J. Ind. Intg. Mgmt. 2017, 2, 1750012. [Google Scholar] [CrossRef]
- Hammer, M.; Maschotta, R.; Zimmermann, A. Model-Driven Application Development for Evaluation and optimization of Automotive E/E-Architectures. In Proceedings of the 2021 IEEE International Conference on Recent Advances in Systems Science and Engineering, Shanghai, China, 12–14 December 2021; pp. 1–8, ISBN 978-1-66543-441-6. [Google Scholar]
- Charette, R.N. How Software is Eating the Car. Available online: https://spectrum.ieee.org/software-eating-car (accessed on 4 May 2022).
- Fakih, M.; Klemp, O.; Puch, S.; Grüttner, K. A modeling methodology for collaborative evaluation of future automotive innovations. Softw. Syst. Model. 2021, 20, 1587–1608. [Google Scholar] [CrossRef]
- Hennig, A.; Topcu, T.G.; Szajnfarber, Z. So You Think Your System Is Complex?: Why and How Existing Complexity Measures Rarely Agree. J. Mech. Des. 2022, 144, 041401. [Google Scholar] [CrossRef]
- D’Ambrosio, J.; Soremekun, G. Systems engineering challenges and MBSE opportunities for automotive system design. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 2075–2080. [Google Scholar]
- Schmidt, M.M.; Zimmermann, T.C.; Stark, R. Systematic Literature Review of System Models for Technical System Development. Appl. Sci. 2021, 11, 3014. [Google Scholar] [CrossRef]
- Henderson, K.; Salado, A. Value and benefits of model-based systems engineering (MBSE): Evidence from the literature. Syst. Eng. 2021, 24, 51–66. [Google Scholar] [CrossRef]
- Obstbaum, M.; Wurstbauer, U.; König, C.; Wagner, T.; Kübler, C.; Fäßler, V. From a Graph to a Development Cycle: MBSE as an Approach to reduce Development Efforts. In 66. Deutscher Luft- Und Raumfahrtkongress; Deutsche Gesellschaft für Luft-und Raumfahrt-Lilienthal-Oberth eV: München, Germany, 2017. [Google Scholar]
- Eigner, M.; Huwig, C.; Dickopf, T. Cost-Benefit Analysis in Model-Based Systems Engineering: State of the Art and Future Potentials. In Product Modularisation, Product Architecture, Systems Engineering, Product Service Systems; Weber, C., Husung, S., Cascini, G., Cantamessa, M., Marjanovic, D., Rotini, F., Eds.; Design Society: Glasgow, UK, 2015; ISBN 978-1-90467-070-4. [Google Scholar]
- Madni, A.; Purohit, S. Economic Analysis of Model-Based Systems Engineering. Systems 2019, 7, 12. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Fried, D.; Menegay, P. Connecting SysML Models with Engineering Analyses to Support Multidisciplinary System Development. In Aviation Technology, Integration, and Operations (ATIO) Conferences, Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, Indiana, 17–19 September 2012; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 2012; ISBN 978-1-60086-930-3. [Google Scholar]
- Ma, J.; Wang, G.; Lu, J.; Vangheluwe, H.; Kiritsis, D.; Yan, Y. Systematic Literature Review of MBSE Tool-Chains. Appl. Sci. 2022, 12, 3431. [Google Scholar] [CrossRef]
- Rojas, J.A.M.; Fernández, J.L.; Montero, R.S.; Espí, P.L.L.; Diez-Jimenez, E. Model-Based Systems Engineering Applied to Trade-Off Analysis of Wireless Power Transfer Technologies for Implanted Biomedical Microdevices. Sensors 2021, 21, 3201. [Google Scholar] [CrossRef]
- Spyropoulos, D.; Baras, J.S. Extending Design Capabilities of SysML with Trade-off Analysis: Electrical Microgrid Case Study. Procedia Comput. Sci. 2013, 16, 108–117. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Hoepfner, G.; Berroth, J.; Pasch, G.; Jacobs, G. Towards Holistic System Models Including Domain-Specific Simulation Models Based on SysML. Systems 2021, 9, 76. [Google Scholar] [CrossRef]
- Simpson, T.W.; Martins, J.R.R.A. Multidisciplinary Design Optimization for Complex Engineered Systems: Report From a National Science Foundation Workshop. J. Mech. Des. 2011, 133, 101002. [Google Scholar] [CrossRef] [Green Version]
- Martins, J.R.R.A.; Lambe, A.B. Multidisciplinary Design Optimization: A Survey of Architectures. AIAA J. 2013, 51, 2049–2075. [Google Scholar] [CrossRef] [Green Version]
- Papageorgiou, A.; Ölvander, J. The role of multidisciplinary design optimization (MDO) in the development process of complex engineering products. In DS 87-4 Proceedings of the 21st International Conference on Engineering Design (ICED 17) Vol 4: Design Methods and Tools, Vancouver, Canada, 21–25 August 2017; The Design Society: Copenhagen, Denmark, 2017; pp. 109–118. ISBN 978-1-90467-092-6. [Google Scholar]
- Ciampa, P.D.; La Rocca, G.; Nagel, B. A MBSE Approach to MDAO Systems for the Development of Complex Products. In Model Based Systems Engineering (MBSE) Integration with MDO I, Proceedings of the AIAA Aviation Forum, Virtual Event, 15–19 June 2020; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020; ISBN 978-1-62410-598-2. [Google Scholar]
- Ciampa, P.D.; Nagel, B. Towards the 3rd generation MDO collaborative environment. In Proceedings of the 30th International Council of the Aeronautical Sciences Congress 2016 (30th ICAS 2016), Daejeon, Korea, 25–30 September 2016; Deutsche Gesellschaft Für Luft-Und Raumfahrt e.V: Bonn, Germany, 2016; pp. 1–12. ISBN 978-3-93218-285-3. [Google Scholar]
- Chaudemar, J.-C.; de Saqui-Sannes, P. MBSE and MDAO for Early Validation of Design Decisions: A Bibliography Survey. In Proceedings of the IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 15 April–15 May 2021; IEEE: New York, NY, USA, 2021; pp. 1–8. ISBN 978-1-66544-439-2. [Google Scholar]
- Höpfner, G.; Jacobs, G.; Zerwas, T.; Drave, I.; Berroth, J.; Guist, C.; Rumpe, B.; Kohl, J. Model-Based Design Workflows for Cyber-Physical Systems Applied to an Electric-Mechanical Coolant Pump. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1097, 12004. [Google Scholar] [CrossRef]
- Haghighat, A.K.; Roumi, S.; Madani, N.; Bahmanpour, D.; Olsen, M.G. An intelligent cooling system and control model for improved engine thermal management. Appl. Therm. Eng. 2018, 128, 253–263. [Google Scholar] [CrossRef]
- Sen-Chun, M.; Hong-Biao, Z.; Ting-Ting, W.; Xiao-Hui, W.; Feng-Xia, S. Optimal design of blade in pump as turbine based on multidisciplinary feasible method. Sci. Prog. 2020, 103, 36850420982105. [Google Scholar] [CrossRef]
- Mariani, L.; Di Bartolomeo, M.; Di Battista, D.; Cipollone, R.; Fremondi, F.; Roveglia, R. Experimental and numerical analyses to improve the design of engine coolant pumps. In Proceedings of the 75th National ATI Congress, Rome, Italy, 15–16 September 2020; EDP Sciences: Les Ulis, France, 2020; p. 6017. ISBN 978-1-71381-916-5. [Google Scholar]
- Fernández, S.; Jiménez, M.; Porras, J.; Romero, L.; Espinosa, M.M.; Domínguez, M. Additive Manufacturing and Performance of Functional Hydraulic Pump Impellers in Fused Deposition Modeling Technology. J. Mech. Des. 2016, 138, 024501. [Google Scholar] [CrossRef]
- Si, Q.; Lu, R.; Shen, C.; Xia, S.; Sheng, G.; Yuan, J. An Intelligent CFD-Based Optimization System for Fluid Machinery: Automotive Electronic Pump Case Application. Appl. Sci. 2020, 10, 366. [Google Scholar] [CrossRef] [Green Version]
- Koller, R.; Kastrup, N. Prinziplösungen Zur Konstruktion Technischer Produkte; Springer: Berlin/Heidelberg, Germany, 1998; ISBN 978-3-642-63712-4. [Google Scholar]
- Schmidt, S.; Schlager, B.; Muckenhuber, S.; Stark, R. Configurable Sensor Model Architecture for the Development of Automated Driving Systems. Sensors 2021, 21, 4687. [Google Scholar] [CrossRef]
- Albers, A.; Braun, A.; Sadowski, E.; Wynn, D.C.; Wyatt, D.F.; Clarkson, P.J. System Architecture Modeling in a Software Tool Based on the Contact and Channel Approach (C&C-A). J. Mech. Des. 2011, 133, 101006. [Google Scholar] [CrossRef]
- Holzenberger, K.; Jung, K. Centrifugal Pump Lexicon. Available online: https://www.ksb.com/en-global/centrifugal-pump-lexicon/article/head-coefficient-1116552 (accessed on 5 May 2022).
- Yedidiah, S. Centrifugal Pump User’s Guidebook; Springer US: Boston, MA, USA, 1996; ISBN 978-1-46128-516-8. [Google Scholar]
- Pumps, S. Centrifugal Pump Handbook, 3rd ed.; Elsevier Butterworth-Heinemann: Amsterdam, The Netherlands, 2010; ISBN 978-0-75068-612-9. [Google Scholar]
- Wesche, W. Radiale Kreiselpumpen; Springer: Berlin/Heidelberg, Germany, 2016; ISBN 978-3-66248-911-6. [Google Scholar]
- Martins, J.R.R.A.; Ning, A. Engineering Design Optimization; Cambridge University Press: Cambridge, UK, 2022; ISBN 978-1-10898-064-7. [Google Scholar]
- Hazelrigg, G.A.; Saari, D.G. Toward a Theory of Systems Engineering. J. Mech. Des. 2022, 144, 011402. [Google Scholar] [CrossRef]
- Huang, W.; Huang, J.; Yin, C. Optimal Design and Control of a Two-Speed Planetary Gear Automatic Transmission for Electric Vehicle. Appl. Sci. 2020, 10, 6612. [Google Scholar] [CrossRef]
- Deb, K.; Jain, S. Multi-Speed Gearbox Design Using Multi-Objective Evolutionary Algorithms. J. Mech. Des. 2003, 125, 609–619. [Google Scholar] [CrossRef] [Green Version]
- Manikowski, P.L.; Walker, D.J.; Craven, M.J. Multi-Objective Optimisation of the Benchmark Wind Farm Layout Problem. JMSE 2021, 9, 1376. [Google Scholar] [CrossRef]
- Kwong, W.Y.; Zhang, P.Y.; Romero, D.; Moran, J.; Morgenroth, M.; Amon, C. Multi-Objective Wind Farm Layout Optimization Considering Energy Generation and Noise Propagation With NSGA-II. J. Mech. Des. 2014, 136, 091010. [Google Scholar] [CrossRef]
- Larminie, J.; Lowry, J. Electric Vehicle Technology Explained, 2nd ed.; Wiley a John Wiley & Sons Ltd. Publication: Chichester, UK, 2012; ISBN 978-1-11994-273-3. [Google Scholar]
- Docimo, D.J.; Kang, Z.; James, K.A.; Alleyne, A.G. A Novel Framework for Simultaneous Topology and Sizing Optimization of Complex, Multi-Domain Systems-of-Systems. J. Mech. Des. 2020, 142, 091701. [Google Scholar] [CrossRef]
- Maputi, E.S.; Arora, R. Multi-objective optimization of a 2-stage spur gearbox using NSGA-II and decision-making methods. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 477. [Google Scholar] [CrossRef]
- Alizadeh, M.; Esfahani, M.N.; Tian, W.; Ma, J. Data-Driven Energy Efficiency and Part Geometric Accuracy Modeling and Optimization of Green Fused Filament Fabrication Processes. J. Mech. Des. 2020, 142, 041701. [Google Scholar] [CrossRef]
- Aiello, O. Sizing a Drone Battery by coupling MBSE and MDAO. In Proceedings of the 11th European Congress Embedded Real Time Systems, Toulouse, France, 1–2 June 2022. [Google Scholar]
- Aiello, O.; Del Kandel, D.S.R.; Chaudemar, J.-C.; Poitou, O.; de Saqui-Sannes, P. Populating MBSE Models from MDAO Analysis. In Proceedings of the IEEE International Symposium on Systems Engineering (ISSE), Vienna, Austria, 13 September–13 October 2021; IEEE: New York, NY, USA, 2021; pp. 1–8. ISBN 978-1-66543-168-2. [Google Scholar]
- Jeyaraj, A.K.; Tabesh, N.; Liscouet-Hanke, S. Connecting Model-based Systems Engineering and Multidisciplinary Design Analysis and Optimization for Aircraft Systems Architecting. In MBSE Integration with MDO II, AIAA Aviation Forum, Virtual Event, 2–6 August 2021; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021; ISBN 978-1-62410-610-1. [Google Scholar]
- Min, B.I.; Kerzhner, A.A.; Paredis, C.J.J. Process Integration and Design Optimization for Model-Based Systems Engineering With SysML. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Presented at ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Washington, DC, USA, 28–31 August 2011; ASME: New York, NY, USA, 2012; pp. 1361–1369. ISBN 978-0-79185-479-2. [Google Scholar]
- Leserf, P.; de Saqui-Sannes, P.; Hugues, J. Multi domain optimization with SysML modeling. In Proceedings of the 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA), City of Luxembourg, Luxembourg, 8–11 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–8. ISBN 978-1-46737-930-4. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | ||
|---|---|---|
| Lower limit | 30 | 4.9 |
| Upper limit | 363.4 | 30 |
| Design Variable | |||||
|---|---|---|---|---|---|
| Lower limit | 1500 | 60 | 12 | 25° | 7 |
| Upper limit | 3000 | 600 | 30 | 35° | 9 |
| Design Variables | Objectives | |||||
|---|---|---|---|---|---|---|
| 1635 | 150 | 12.11 | 34.95° | 9 | 123.53 | 47203 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habermehl, C.; Höpfner, G.; Berroth, J.; Neumann, S.; Jacobs, G. Optimization Workflows for Linking Model-Based Systems Engineering (MBSE) and Multidisciplinary Analysis and Optimization (MDAO). Appl. Sci. 2022, 12, 5316. https://doi.org/10.3390/app12115316
Habermehl C, Höpfner G, Berroth J, Neumann S, Jacobs G. Optimization Workflows for Linking Model-Based Systems Engineering (MBSE) and Multidisciplinary Analysis and Optimization (MDAO). Applied Sciences. 2022; 12(11):5316. https://doi.org/10.3390/app12115316
Chicago/Turabian StyleHabermehl, Christian, Gregor Höpfner, Jörg Berroth, Stephan Neumann, and Georg Jacobs. 2022. "Optimization Workflows for Linking Model-Based Systems Engineering (MBSE) and Multidisciplinary Analysis and Optimization (MDAO)" Applied Sciences 12, no. 11: 5316. https://doi.org/10.3390/app12115316