
Sensorless Posture Detection of Reluctance Spherical Motor Based on Mutual Inductance Voltage

 , ,
, ,
Abstract
:1. Introduction
2. Basic Principle of Detecting Rotation Angle from Mutual Inductance Voltage
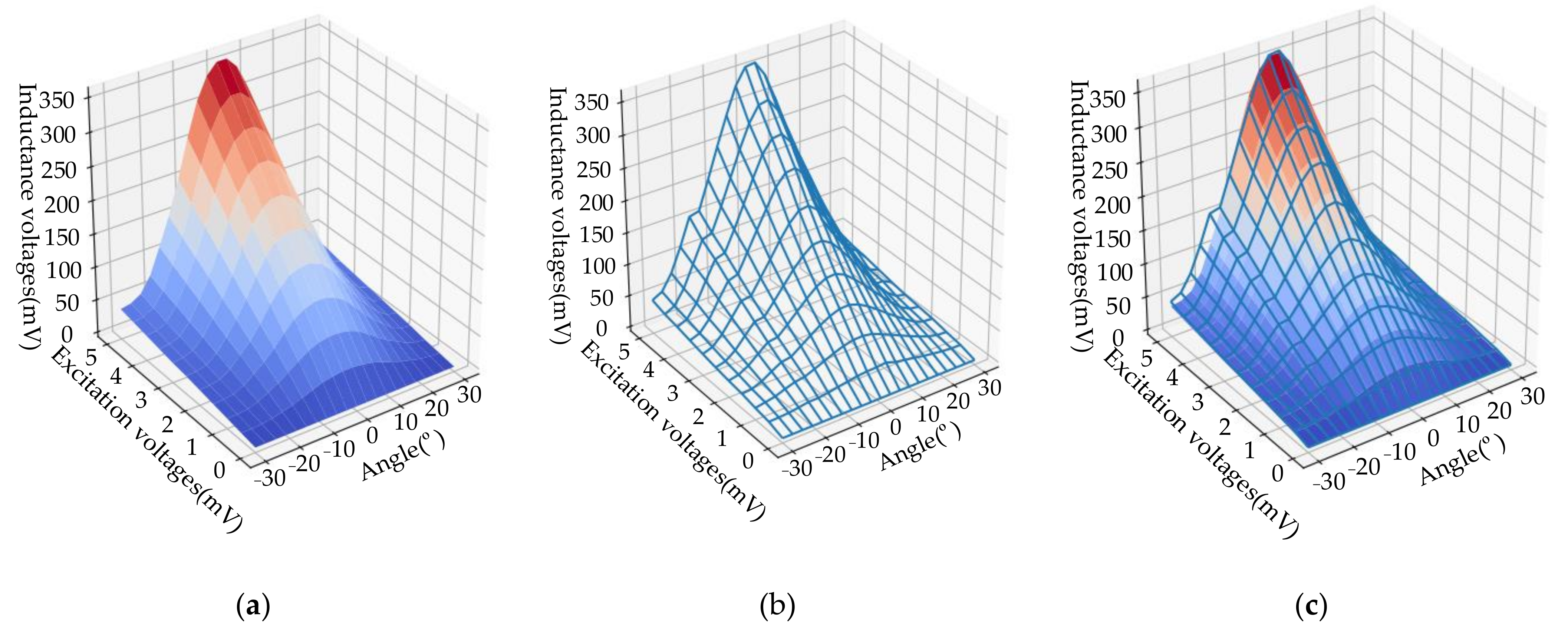
2.1. Mutual Inductance Voltage Characteristics of Switched Reluctance Motor
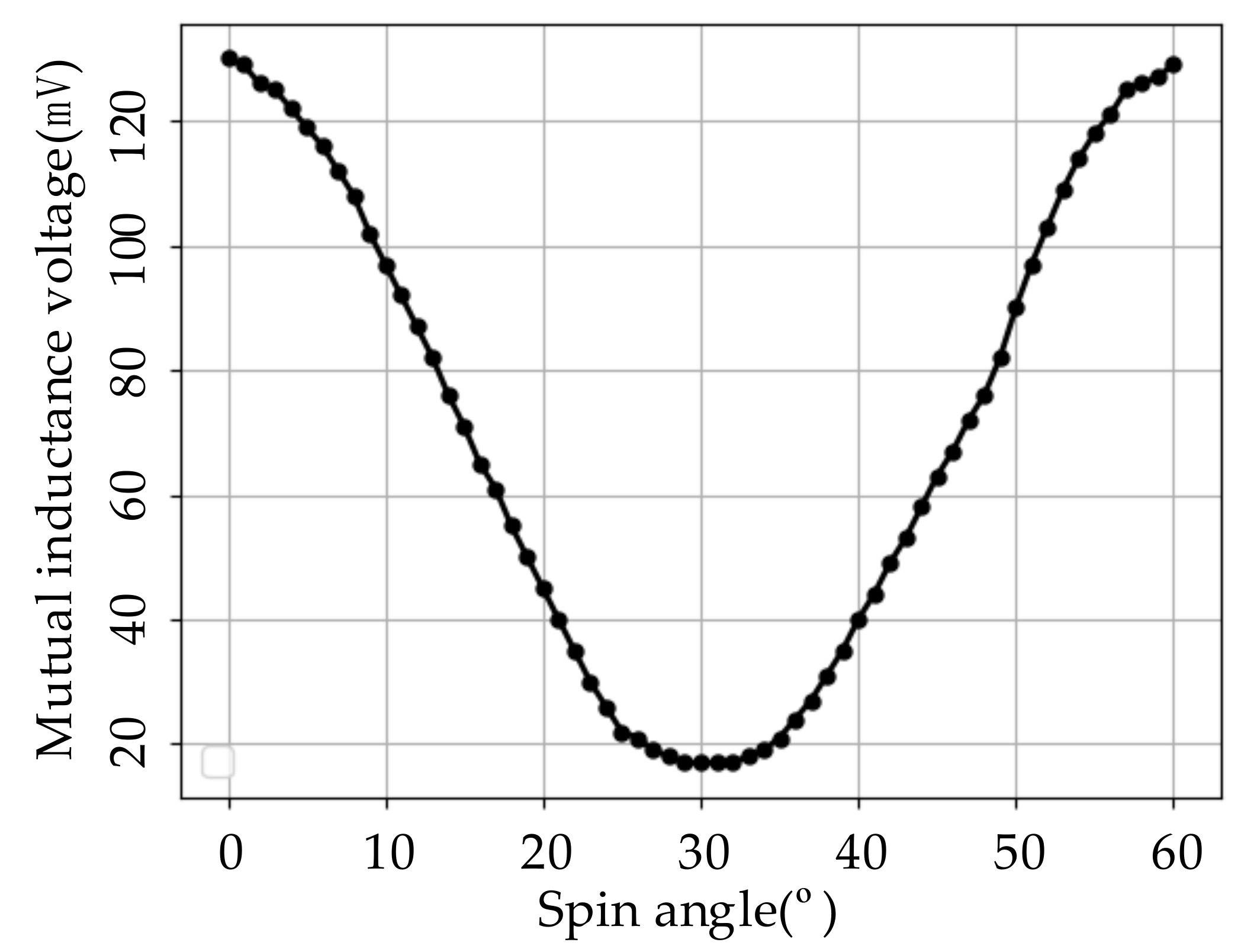
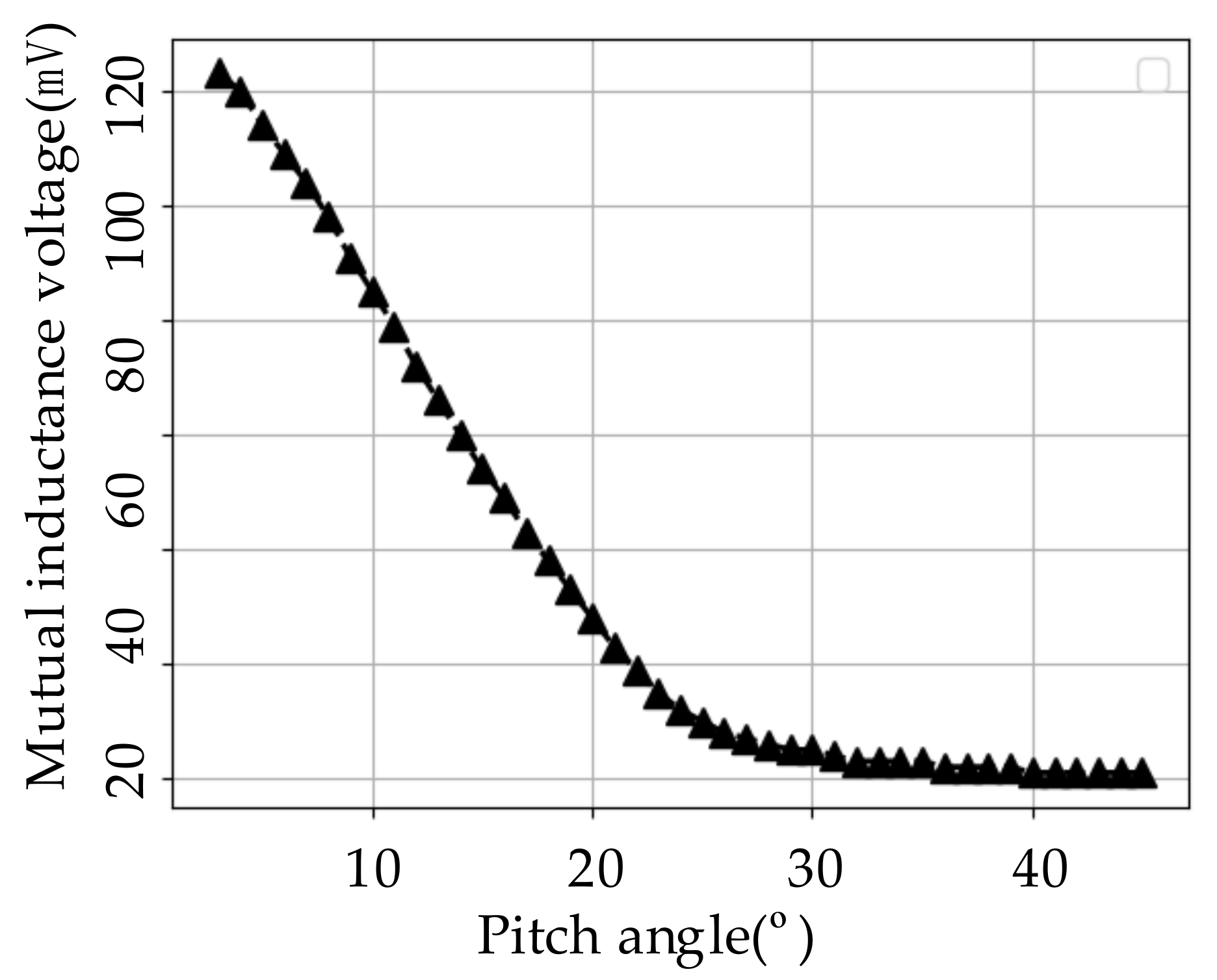
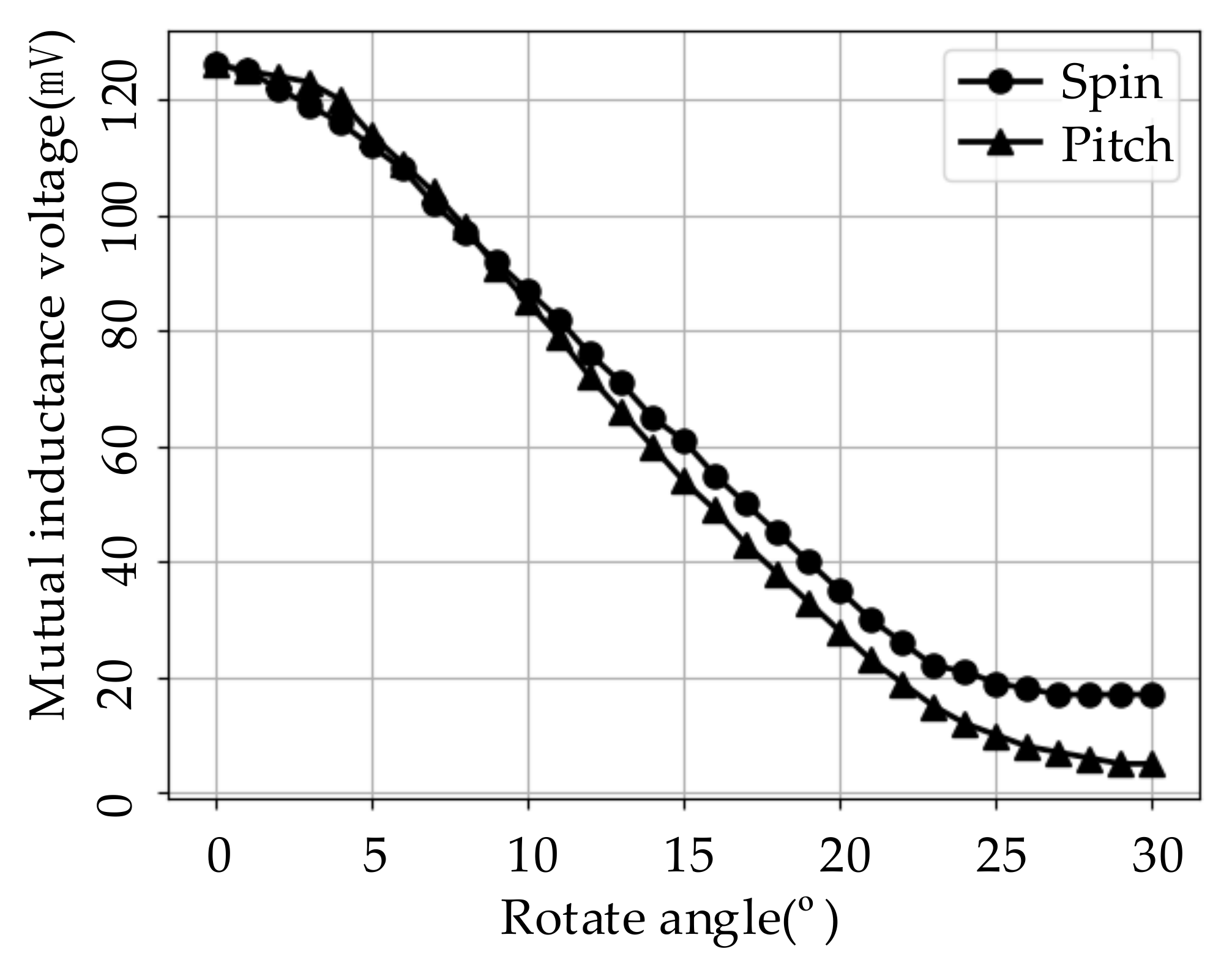
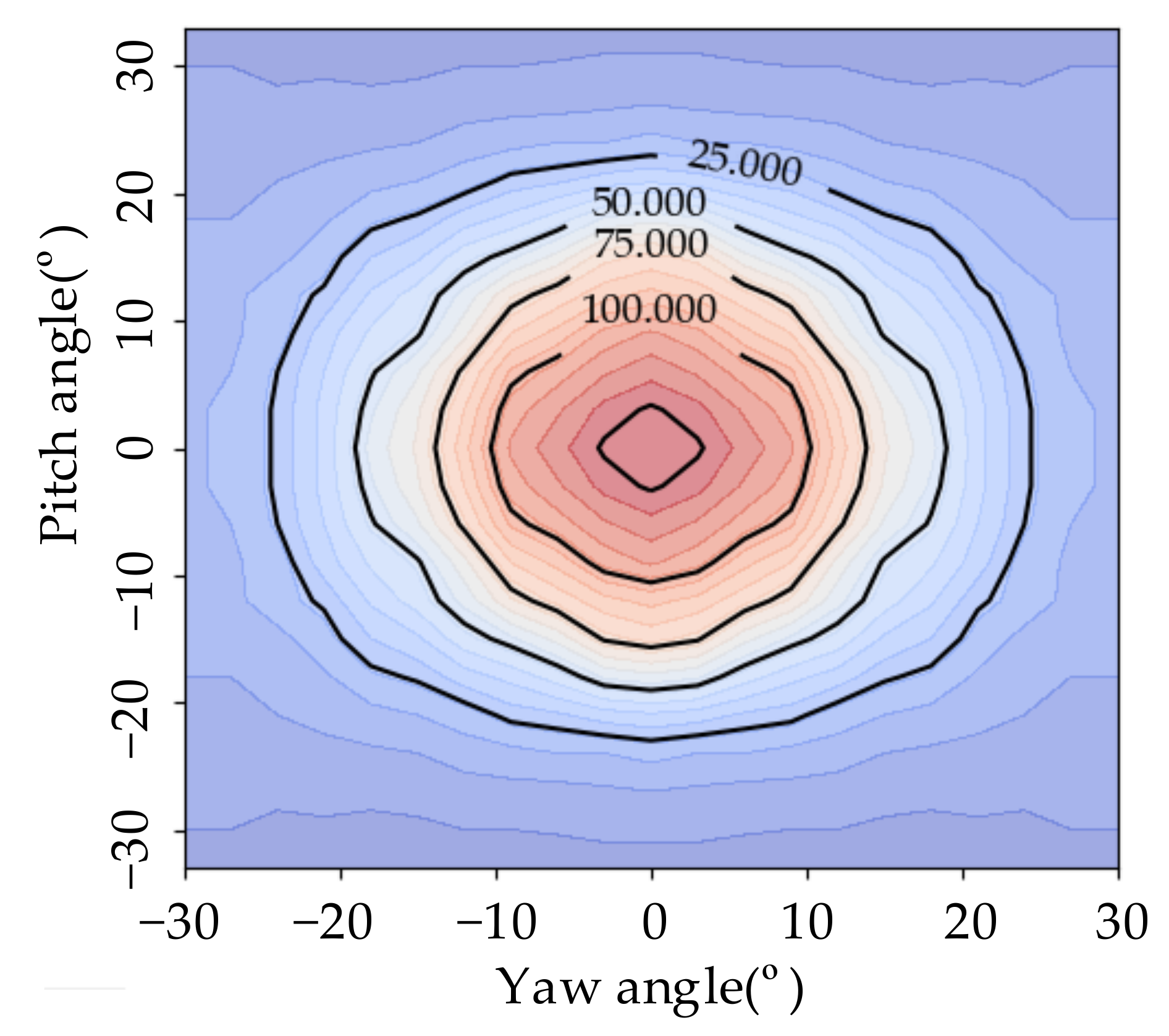
2.2. Numerical Relationship between Mutual Inductance Voltage and Single-DoF Position Angle
3. Particle Swarm Optimization Algorithm for 3-DoF Attitude Recognition
3.1. Identification Principle
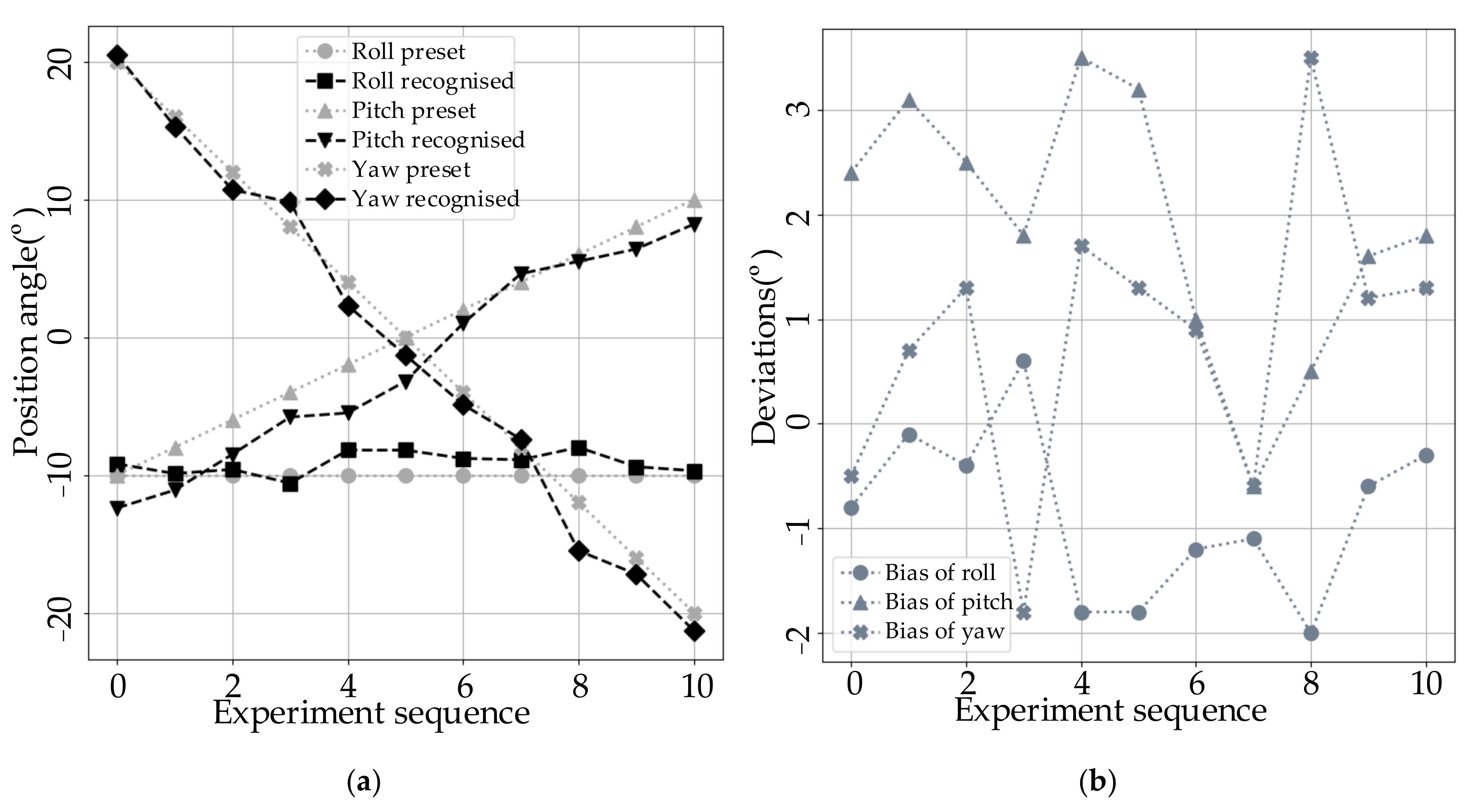
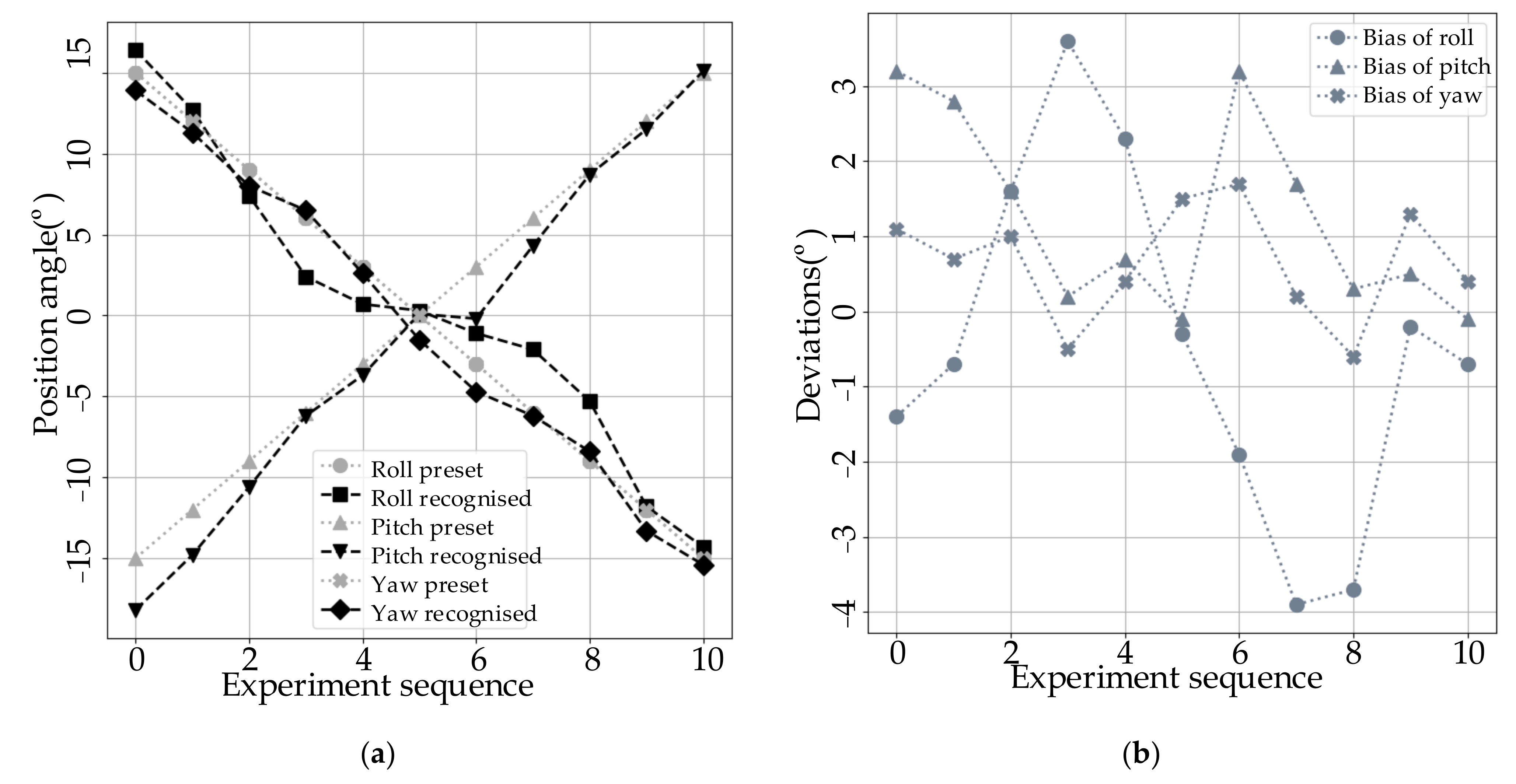
3.2. Experimental Verification
- The bias brought from inconsistent magnetic circuits caused by the manufacturing process and assembly accuracy of the spherical motor. In the process of testing and drawing the contour lines of the mutual inductance voltage, it is found that the contour lines obtained by selecting different rotor pole as regulating object have certain differences. In this regard, this paper takes the median processing of the mutual inductance voltage contour lines obtained from the different rotor pole tests. The difference between this median and the actual measurement value would be reflected in the bias of the final result. This part of bias can be reduced by improving the manufacturing process of the motor and improving the consistency of the magnetic circuit.
- The bias brought by the algorithm termination condition. In order to ensure the output speed of the algorithm, a coercive termination condition according to evolutionary algebra is set. This may lead to some cases in which the fitness of the output results is not high enough. Therefore, it is necessary to further improve the efficiency of the algorithm, reduce the amount of computation, and improve the convergence speed.
- The deviation of the preset position angle during the experiment. During the verification experiment, the rotor is first manually rotated to the preset position according to the reading of the contact sensor. Due to the need to meet the position requirements in three directions at the same time in the manual process, certain deviations would inevitably occur. In addition, in the process of measurement, the rotor would be slightly displaced due to the gravity of the additional mechanism and other factors, which would also lead to the deviation between the measured angle and the preset angle.
4. Conclusions
- Sensorless position detection is often carried out by using the salient pole effect or nonlinear saturation characteristics of the motor. In order to avoid excessive reluctance torque, permanent magnet spherical motors usually adopt a coreless design; thus, there are no convex polarity or nonlinear saturation characteristics that can be utilized. Compared with permanent magnet spherical motors, it is easier for the reluctance spherical motor to realize sensorless position detection.
- The design structure of the spherical motor has great influence on the sensorless position detection effect. For example, the periodicity of the rotor structure corresponds to the periodicity of the detection result. From the perspective of the detection range, the number of rotor magnetic poles should be as small as possible. Therefore, whether from the perspective of subsequent drive control or position detection, the influence should be considered at the early stage of motor design.
Author Contributions
Funding
Conflicts of Interest
References
- Wen, Y.; Wang, Q.; Li, G.; Guo, X. Adaptive fuzzy tracking control based on backstepping for permanent magnet spherical motor. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 2176–2181. [Google Scholar]
- Jinjun, G.; Kim, D.H.; Son, H. Effects of Magnetic Pole Design on Orientation Torque for a Spherical Motor. IEEE/ASME Trans. Mechatron. 2013, 18, 1420–1425. [Google Scholar] [CrossRef]
- Sakaidani, Y.; Hirata, K.; Maeda, S.; Niguchi, N. Feedback Control of the 2-DOF Actuator Specialized for 2-Axes Rotation. IEEE Trans. Magn. 2013, 49, 2245–2248. [Google Scholar] [CrossRef]
- Bai, K.; Lee, K.M. Direct Field-Feedback Control of a Ball-Joint-Like Permanent-Magnet Spherical Motor. IEEE/ASME Trans. Mechatron. 2014, 19, 975–986. [Google Scholar] [CrossRef]
- Wang, W.; Wang, J.; Jewell, G.W.; Howe, D. Design and control of a novel spherical permanent magnet actuator with three degrees of freedom. IEEE/ASME Trans. Mechatron. 2003, 8, 457–468. [Google Scholar] [CrossRef]
- Wang, J.; Mitchell, K.; Jewell, G.W.; Howe, D. Multi-degree-of-freedom spherical permanent magnet motors. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 2, pp. 1798–1805. [Google Scholar]
- Rossini, L.; Mingard, S.; Boletis, A.; Forzani, E.; Onillon, E.; Perriard, Y. Rotor Design Optimization for a Reaction Sphere Actuator. In Proceedings of the International Conference on Electrical Machines & Systems, Busan, Korea, 26–29 October 20l3; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Stein, D.; Scheinerman, E.R.; Chirikjian, G.S. Mathematical models of binary spherical-motion encoders. IEEE/ASME Trans. Mechatron. 2003, 8, 234–244. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Q.J.; Qian, Z.; Wen, Y.; Ma, S. Rotor orientation detection method of spherical motor based on single 2-DOF optical sensor. In Proceedings of the 17th International Conference on Electrical Machines and Systems, Hangzhou, China, 22–25 October 2014; pp. 2182–2185. [Google Scholar]
- Bai, K.; Lee, K.M.; Jinjin, L. A magnetic flux model method for detecting multi-dof motion of a permannt magnet spherical motor. Mechatronics 2016, 39, 217–225. [Google Scholar] [CrossRef]
- Bai, K.; Lee, K.M. A Sensor-Less Motion Sensing Method of a 3-DOF Permanent Magnet Spherical Motor. In Proceedings of the IFAC Symposium on Mechatronic System, Milano, Italy, 30 August 2013; pp. 160–164. [Google Scholar]
- Khan, Y.A.; Verma, V. F-MRAS Based Speed Sensorless Vector Controlled Switched Reluctance Motor Drive. In Proceedings of the 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Cai, J.; Yan, Y.; Zhang, W.; Zhao, X. A Reliable Sensorless Starting Scheme for SRM With Lowered Pulse Injection Current Influences. IEEE Trans. Instrum. Meas. 2020, 70, 1–9. [Google Scholar] [CrossRef]
- Wang, S.; Hu, Z.; Cui, X.P. High-precision Sensorless Control Based on Magnetic Flux/Current Method for SRM Starting/Generating System. In Proceedings of the IECON 2020-46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Gan, C.; Sun, Q.; Chen, Y.; Si, J.; Wu, J.; Hu, Y. A Position Sensorless Torque Control Strategy for Switched Reluctance Machines with Fewer Current Sensors. IEEE/ASME Trans. Mechatron. 2020. Early Acces. [Google Scholar] [CrossRef]
- Qiu, C.; Guan, Y.; Liu, Y.; Fu, X. Position Sensorless Control of Switched Reluctance Motor Based on Full-bridge Power Converter. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Yang, B.; Guo, L.; Guo, R.; Zhao, M.; Zhao, T. A Novel Trilateration Algorithm for RSSI-Based Indoor Localization. IEEE Sens. J. 2020, 20, 8164–8172. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, Y. Quality of Trilateration: Confidence-Based Iterative Localization. IEEE Trans. Parallel Distrib. Syst. 2010, 21, 631–640. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Series | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| roll preset | −10 | −10 | −10 | −10 | −10 | −10 | −10 | −10 | −10 | −10 | −10 |
| roll recognized | −9.2 | −9.9 | −9.6 | −10.6 | −8.2 | −8.2 | −8.8 | −8.9 | −8 | −9.4 | −9.7 |
| pitch preset | −10 | −8 | −6 | −4 | −2 | 0 | 2 | 4 | 6 | 8 | 10 |
| pitch recognized | −12.4 | −11.1 | −8.5 | −5.8 | −5.5 | −3.2 | 1 | 4.6 | 5.5 | 6.4 | 8.2 |
| yaw preset | 20 | 16 | 12 | 8 | 4 | 0 | −4 | −8 | −12 | −16 | −20 |
| yaw recognized | 20.5 | 15.3 | 10.7 | 9.8 | 2.3 | −1.3 | −4.9 | −7.4 | −15.5 | −17.2 | −21.3 |
| bias of roll | −0.8 | −0.1 | −0.4 | 0.6 | −1.8 | −1.8 | −1.2 | −1.1 | −2 | −0.6 | −0.3 |
| bias of pitch | 2.4 | 3.1 | 2.5 | 1.8 | 3.5 | 3.2 | 1 | −0.6 | 0.5 | 1.6 | 1.8 |
| bias of yaw | −0.5 | 0.7 | 1.3 | −1.8 | 1.7 | 1.3 | 0.9 | −0.6 | 3.5 | 1.2 | 1.3 |
| population standard deviation | 1.7 | ||||||||||
| Test Series | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| roll preset | 15 | 12 | 9 | 6 | 3 | 0 | −3 | −6 | −9 | −12 | −15 |
| roll recognized | 16.4 | 12.7 | 7.4 | 2.4 | 0.7 | 0.3 | −1.1 | −2.1 | −5.3 | −11.8 | −14.3 |
| pitch preset | −15 | −12 | −9 | −6 | −3 | 0 | 3 | 6 | 9 | 12 | 15 |
| pitch recognized | −18.2 | −14.8 | −10.6 | −6.2 | −3.7 | 0.1 | −0.2 | 4.3 | 8.7 | 11.5 | 15.1 |
| yaw preset | 15 | 12 | 9 | 6 | 3 | 0 | −3 | −6 | −9 | −12 | −15 |
| yaw recognized | 13.9 | 11.3 | 8 | 6.5 | 2.6 | −1.5 | −4.7 | −6.2 | −8.4 | −13.3 | −15.4 |
| bias of roll | −1.4 | −0.7 | 1.6 | 3.6 | 2.3 | −0.3 | −1.9 | −3.9 | −3.7 | −0.2 | −0.7 |
| bias of pitch | 3.2 | 2.8 | 1.6 | 0.2 | 0.7 | −0.1 | 3.2 | 1.7 | 0.3 | 0.5 | −0.1 |
| bias of yaw | 1.1 | 0.7 | 1 | −0.5 | 0.4 | 1.5 | 1.7 | 0.2 | −0.6 | 1.3 | 0.4 |
| population standard deviation | 1.75 | ||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wang, Q.; Li, G.; Zhou, R.; Wen, Y.; Ju, L.; Zhou, S. Sensorless Posture Detection of Reluctance Spherical Motor Based on Mutual Inductance Voltage. Appl. Sci. 2021, 11, 3515. https://doi.org/10.3390/app11083515
Xu J, Wang Q, Li G, Zhou R, Wen Y, Ju L, Zhou S. Sensorless Posture Detection of Reluctance Spherical Motor Based on Mutual Inductance Voltage. Applied Sciences. 2021; 11(8):3515. https://doi.org/10.3390/app11083515
Chicago/Turabian StyleXu, Jiazi, Qunjing Wang, Guoli Li, Rui Zhou, Yan Wen, Lufeng Ju, and Sili Zhou. 2021. "Sensorless Posture Detection of Reluctance Spherical Motor Based on Mutual Inductance Voltage" Applied Sciences 11, no. 8: 3515. https://doi.org/10.3390/app11083515