
Analysis of Torque and Force Induced by Rotary Nickel-Titanium Instruments during Root Canal Preparation: A Systematic Review


Abstract
:1. Introduction
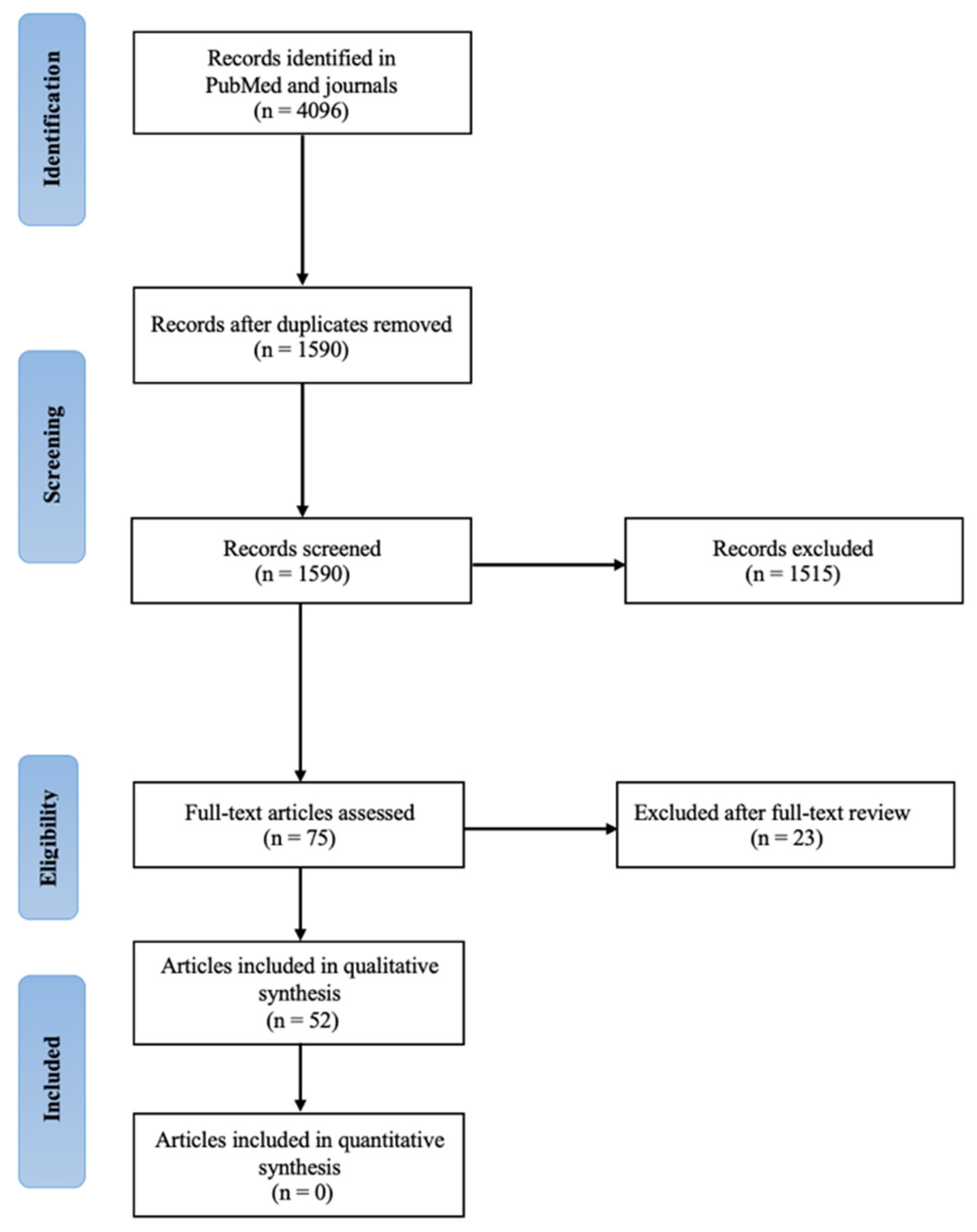
2. Materials and Methods
- The article reported torque and/or force in an in vivo study.
- The article investigated torque and/or force in an in vitro study using either extracted teeth, cadaveric teeth, plastic/resin blocks, or dentin discs.
- The article examined torque and/or force in a three-dimension finite element study.
3. Results
4. Discussion
4.1. Type of Sample and Canal Curvature
4.2. Instrument Design and Cutting Efficiency
4.3. Instrument Size and Canal Size
4.4. Contact Area
4.5. Preparation Technique
4.6. Preparation Time
4.7. Insertion Depth and Number of Insertions
4.8. Correlation with Displacement
4.9. Motor
4.10. Kinematic
4.11. Operative Motion
4.12. Rotational Speed and Pecking Speed
4.13. Lubricant
4.14. Experience
4.15. Metallurgy
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yum, J.; Cheung, G.S.-P.; Park, J.-K.; Hur, B.; Kim, H.-C. Torsional strength and toughness of nickel-titanium rotary files. J. Endod. 2011, 37, 382–386. [Google Scholar] [CrossRef] [PubMed]
- Park, S.-Y.; Cheung, G.S.P.; Yum, J.; Hur, B.; Park, J.-K.; Kim, H.-C. Dynamic torsional resistance of nickel-titanium rotary instruments. J. Endod. 2010, 36, 1200–1204. [Google Scholar] [CrossRef]
- Lee, J.Y.; Kwak, S.W.; Ha, J.-H.; Kim, H.-C. Ex-vivo comparison of torsional stress on nickel–titanium instruments activated by continuous rotation or adaptive motion. Materials 2020, 13, 1900. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ha, J.-H.; Kwak, S.W.; Kim, S.-K.; Kim, H.-C. Screw-in forces during instrumentation by various file systems. Restor. Dent. Endod. 2016, 41, 304–309. [Google Scholar] [CrossRef] [Green Version]
- Park, H. A comparison of Greater Taper files, ProFiles, and stainless steel files to shape curved root canals. Oral Surg. Oral Med. Oral Pathol. Oral Radiol. Endod. 2001, 91, 715–718. [Google Scholar] [CrossRef]
- Yared, G.M.; Dagher, F.E.B.; Machtou, P. Influence of rotational speed, torque and operator’s proficiency on ProFile failures. Int. Endod. J. 2001, 34, 47–53. [Google Scholar] [CrossRef] [PubMed]
- Palma, P.J.; Messias, A.; Cerqueira, A.R.; Tavares, L.D.; Caramelo, F.; Roseiro, L.; Santos, J.M. Cyclic fatigue resistance of three rotary file systems in a dynamic model after immersion in sodium hypochlorite. Odontology 2019, 107, 324–332. [Google Scholar] [CrossRef]
- Ha, J.-H.; Park, S.-S. Influence of glide path on the screw-in effect and torque of nickel-titanium rotary files in simulated resin root canals. Restor. Dent. Endod. 2012, 37, 215–219. [Google Scholar] [CrossRef] [PubMed]
- Ha, J.-H.; Lee, C.-J.; Kwak, S.-W.; Abed, R.E.; Ha, D.; Kim, H.-C. Geometric optimization for development of glide path preparation nickel-titanium rotary instrument. J. Endod. 2015, 41, 916–919. [Google Scholar] [CrossRef]
- Adorno, C.G.; Yoshioka, T.; Suda, H. Crack initiation on the apical root surface caused by three different nickel-titanium rotary files at different working lengths. J. Endod. 2011, 37, 522–525. [Google Scholar] [CrossRef]
- da Cunha Peixoto, I.F.; Pereira, É.S.J.; Aun, D.P.; Buono, V.T.L.; de Azevedo Bahia, M.G. Constant insertion rate methodology for measuring torque and apical force in 3 nickel-titanium instruments with different cross-sectional designs. J. Endod. 2015, 41, 1540–1544. [Google Scholar] [CrossRef]
- Almeida, G.; Aun, D.P.; Resende, P.D.; da Cunha Peixoto, I.F.; Viana, A.C.D.; Buono, V.T.L.; Bahia, M.G. Comparative analysis of torque and apical force to assess the cutting behaviour of protaper next and protaper universal endodontic instruments. Aust. Endod. J. 2020, 46, 52–59. [Google Scholar] [CrossRef]
- Diemer, F.; Calas, P. Effect of pitch length on the behavior of rotary triple helix root canal instruments. J. Endod. 2004, 30, 716–718. [Google Scholar] [CrossRef] [PubMed]
- Kwak, S.W.; Ha, J.-H.; Lee, C.-J.; Abed, R.E.; Abu-Tahun, I.H.; Kim, H.-C. Effects of pitch length and heat treatment on the mechanical properties of the glide path preparation instruments. J. Endod. 2016, 42, 788–792. [Google Scholar] [CrossRef]
- Ha, J.-H.; Jin, M.-U.; Kim, Y.-K.; Kim, S.-K. Comparison of screw-in effect for several nickel-titanium rotary instruments in simulated resin root canal. J. Korean Acad. Conserv. Dent. 2010, 35, 267–272. [Google Scholar] [CrossRef] [Green Version]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. J. Clin. Epidemiol. 2009, 62, e1–e34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peters, O.A.; Barbakow, F. Dynamic torque and apical forces of profile .04 rotary instruments during preparation of curved canals. Int. Endod. J. 2002, 35, 379–389. [Google Scholar] [CrossRef] [PubMed]
- Son, J.-Y.; Ha, J.-H.; Kim, Y.-K. Influence of root canal curvature on the screw-in effect of nickel-titanium rotary files in simulated resin root canal. J. Korean Acad. Conserv. Dent. 2010, 35, 374–379. [Google Scholar] [CrossRef]
- Diemer, F.; Michetti, J.; Mallet, J.-P.; Piquet, R. Effect of asymmetry on the behavior of prototype rotary triple helix root canal instruments. J. Endod. 2013, 39, 829–832. [Google Scholar] [CrossRef] [PubMed]
- Kwak, S.W.; Lee, C.-J.; Kim, S.K.; Kim, H.-C.; Ha, J.-H. Comparison of screw-in forces during movement of endodontic files with different geometries, alloys, and kinetics. Materials 2019, 12, 1506. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gambarini, G.; Galli, M.; Seracchiani, M.; Nardo, D.D.; Versiani, M.; Piasecki, L.; Testarelli, L. In vivo evaluation of operative torque generated by two nickel-titanium rotary instruments during root canal preparation. Eur. J. Dent. 2019, 13, 556–562. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fukumori, Y.; Nishijyo, M.; Tokita, D.; Miyara, K.; Ebihara, A.; Okiji, T. Comparative analysis of mechanical properties of differently tapered nickeltitanium endodontic rotary instruments. Dent. Mater. J. 2018, 37, 667–674. [Google Scholar] [CrossRef] [Green Version]
- Blum, J.Y.; Cohen, A.; Machtou, P.; Micallef, J.P. Analysis of forces developed during mechanical preparation of extracted teeth using Profile NiTi rotary instruments. Int. Endod. J. 1999, 32, 24–31. [Google Scholar]
- Sung, H.-J.; Ha, J.-H.; Kim, S.-K. Influence of taper on the screw-in effect of nickel-titanium rotary files in simulated resin root canal. J. Korean Acad. Conserv. Dent. 2010, 35, 380–386. [Google Scholar] [CrossRef]
- Kwak, S.W.; Ha, J.-H.; Cheung, G.S.-P.; Kim, H.-C.; Kim, S.K. Effect of the glide path establishment on the torque generation to the files during instrumentation: An in vitro measurement. J. Endod. 2018, 44, 496–500. [Google Scholar] [CrossRef]
- Arias, A.; de Vasconcelos, R.A.; Hernández, A.; Peters, O.A. Torsional performance of ProTaper Gold rotary instruments during shaping of small root canals after 2 different glide path preparations. J. Endod. 2017, 43, 447–451. [Google Scholar] [CrossRef] [PubMed]
- Arias, A.; Singh, R.; Peters, O.A. Torque and force induced by ProTaper Universal and ProTaper Next during shaping of large and small root canals in extracted teeth. J. Endod. 2014, 40, 973–976. [Google Scholar] [CrossRef]
- Sattapan, B.; Palamara, J.E.; Messer, H.H. Torque during canal instrumentation using rotary nickel-titanium files. J. Endod. 2000, 26, 156–160. [Google Scholar] [CrossRef] [Green Version]
- Peters, O.A.; Peters, C.I.; Schönenberger, K.; Barbakow, F. ProTaper rotary root canal preparation: Assessment of torque and force in relation to canal anatomy. Int. Endod. J. 2003, 36, 93–99. [Google Scholar] [CrossRef] [Green Version]
- Blum, J.-Y.; Machtou, P.; Ruddle, C.; Micallef, J.P. Analysis of mechanical preparations in extracted teeth using protaper rotary instruments: Value of the safety quotient. J. Endod. 2003, 29, 567–575. [Google Scholar] [CrossRef]
- Hübscher, W.; Barbakow, F.; Peters, O.A. Root canal preparation with FlexMaster: Asessment of torque and force in relation to canal anatomy. Int. Endod. J. 2003, 36, 883–890. [Google Scholar] [CrossRef] [Green Version]
- Blum, J.-Y.; Machtou, P.; Micallef, J.-P. Location of contact areas on rotary Profile® instruments in relationship to the forces developed during mechanical preparation on extracted teeth. Int. Endod. J. 1999, 32, 108–114. [Google Scholar] [CrossRef] [PubMed]
- Schrader, C.; Peters, O. Analysis of torque and force with differently tapered rotary endodontic instruments in vitro. J. Endod. 2005, 31, 120–123. [Google Scholar] [CrossRef]
- Silva, F.M.D.; Kobayashi, C.; Suda, H. Analysis of forces developed during mechanical preparation of extracted teeth using race rotary instruments and profiles. Int. Endod. J. 2005, 38, 17–21. [Google Scholar] [CrossRef] [PubMed]
- Arias, A.; Singh, R.; Peters, O.A. Differences in torsional performance of single- and multiple-instrument rotary systems for glide path preparation. Odontology 2016, 104, 192–198. [Google Scholar] [CrossRef] [PubMed]
- Bardsley, S.; Peters, C.I.; Peters, O.A. The effect of three rotational speed settings on torque and apical force with vortex rotary instruments in vitro. J. Endod. 2011, 37, 860–864. [Google Scholar] [CrossRef] [PubMed]
- Peters, O.A.; Gluskin, A.K.; Weiss, R.A.; Han, J.T. An in vitro assessment of the physical properties of novel Hyflex nickel–titanium rotary instruments. Int. Endod. J. 2012, 45, 1027–1034. [Google Scholar] [CrossRef]
- Kimura, S.; Ebihara, A.; Maki, K.; Nishijo, M.; Tokita, D.; Okiji, T. Effect of optimum torque reverse motion on torque and force generation during root canal instrumentation with crown-down and single-length techniques. J. Endod. 2020, 46, 232–237. [Google Scholar] [CrossRef] [PubMed]
- Bürklein, S.; Stüber, J.P.; Schäfer, E. Real-time dynamic torque values and axial forces during preparation of straight root canals using three different endodontic motors and hand preparation. Int. Endod. J. 2019, 52, 94–104. [Google Scholar] [CrossRef]
- Diop, A.; Maurel, N.; Oiknine, M.; Patoor, E.; Machtou, P. A novel platform for in vitro analysis of torque, forces, and three-dimensional file displacements during root canal preparations: Application to ProTaper rotary files. J. Endod. 2009, 35, 568–572. [Google Scholar] [CrossRef]
- Pereira, E.S.J.; Singh, R.; Arias, A.; Peters, O.A. In vitro assessment of torque and force generated by novel protaper next instruments during simulated canal preparation. J. Endod. 2013, 39, 1615–1619. [Google Scholar] [CrossRef]
- Maki, K.; Ebihara, A.; Kimura, S.; Nishijo, M.; Tokita, D.; Okiji, T. Effect of different speeds of up-and-down motion on canal centering ability and vertical force and torque generation of nickel-titanium rotary instruments. J. Endod. 2019, 45, 68–72.e1. [Google Scholar] [CrossRef] [PubMed]
- Pereira, É.S.J.; Viana, A.C.D.; Buono, V.T.L.; Peters, O.A.; de Azevedo Bahia, M.G. Behavior of nickel-titanium instruments manufactured with different thermal treatments. J. Endod. 2015, 41, 67–71. [Google Scholar] [CrossRef] [PubMed]
- Peters, O.A.; Arias, A.; Choi, A. Mechanical properties of a novel nickel-titanium root canal instrument: Stationary and dynamic tests. J. Endod. 2020, 46, 994–1001. [Google Scholar] [CrossRef]
- Ha, J.-H.; Kwak, S.W.; Sigurdsson, A.; Chang, S.W.; Kim, S.K.; Kim, H.-C. Stress generation during pecking motion of rotary nickel-titanium instruments with different pecking depth. J. Endod. 2017, 43, 1688–1691. [Google Scholar] [CrossRef] [PubMed]
- Tahun, I.H.A.; Kwak, S.W.; Ha, J.-H.; Sigurdsson, A.; Kayahan, M.B.; Kim, H.-C. Effective establishment of glide-path to reduce torsional stress during nickel-titanium rotary instrumentation. Materials 2019, 12, 493. [Google Scholar] [CrossRef] [Green Version]
- Tokita, D.; Ebihara, A.; Nishijo, M.; Miyara, K.; Okiji, T. Dynamic torque and vertical force analysis during nickel-titanium rotary root canal preparation with different modes of reciprocal rotation. J. Endod. 2017, 43, 1706–1710. [Google Scholar] [CrossRef] [PubMed]
- Htun, P.H.; Ebihara, A.; Maki, K.; Kimura, S.; Nishijo, M.; Tokita, D.; Okiji, T. Comparison of torque, force generation and canal shaping ability between manual and nickel-titanium glide path instruments in rotary and optimum glide path motion. Odontology 2020, 108, 188–193. [Google Scholar] [CrossRef]
- Kwak, S.W.; Ha, J.-H.; Cheung, G.S.-P.; Kim, S.K.; Kim, H.-C. Comparison of in vitro torque generation during instrumentation with adaptive versus continuous movement. J. Endod. 2019, 45, 803–807. [Google Scholar] [CrossRef]
- Nishijo, M.; Ebihara, A.; Tokita, D.; Doi, H.; Hanawa, T.; Okiji, T. Evaluation of selected mechanical properties of niti rotary glide path files manufactured from controlled memory wires. Dent. Mater. J. 2018, 37, 549–554. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jamleh, A.; Alfouzan, K. Vertical load induced with twisted file adaptive system during canal shaping. J. Endod. 2016, 42, 1811–1814. [Google Scholar] [CrossRef]
- Nayak, A.; Kankar, P.; Jain, P.K.; Jain, N. Force and vibration generated in apical direction by three endodontic files of different kinematics during simulated canal preparation: An in vitro analytical study. Proc. Inst. Mech. Eng. H 2019, 233, 839–848. [Google Scholar] [CrossRef] [PubMed]
- Gambarini, G.; Seracchiani, M.; Piasecki, L.; Obino, F.V.; Galli, M.; Nardo, D.D.; Testarelli, L. Measurement of torque generated during intracanal instrumentation in vivo. Int. Endod. J. 2019, 52, 737–745. [Google Scholar] [CrossRef]
- Peters, O.A.; Boessler, C.; Zehnder, M. Effect of liquid and past-type lubricants on torque values during simulated rotary root canal instrumentation. Int. Endod. J. 2005, 38, 223–229. [Google Scholar] [CrossRef]
- Boessler, C.; Peters, O.A.; Zehnder, M. Impact of lubricant parameters on rotary instrument torque and force. J. Endod. 2007, 33, 280–283. [Google Scholar] [CrossRef] [PubMed]
- Boessler, C.; Paque, F.; Peters, O.A. The effect of electropolishing on torque and force during simulated root canal preparation with ProTaper shaping files. J. Endod. 2009, 35, 102–106. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maki, K.; Ebihara, A.; Kimura, S.; Nishijo, M.; Tokita, D.; Miyara, K.; Okiji, T. Enhanced root canal-centering ability and reduced screw-in force generation of reciprocating nickel-titanium instruments with a post-machining thermal treatment. Dent. Mater. J. 2020, 39, 251–255. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jamleh, A.; Alfadley, A.; Alfouzan, K. Vertical force induced with WaveOne and WaveOne Gold systems during canal shaping. J. Endod. 2018, 44, 1412–1415. [Google Scholar] [CrossRef] [PubMed]
- Moreinos, D.; Dakar, A.; Stone, N.J.; Moshonov, J. Evaluation of time to fracture and vertical forces applied by a novel Gentlefile system for root canal preparation in simulated root canals. J. Endod. 2016, 42, 505–508. [Google Scholar] [CrossRef]
- Lim, K.C.; Webber, J. The validity of simulated root canals for the investigation of the prepared root canal shape. Int. Endod. J. 1985, 18, 240–246. [Google Scholar] [CrossRef]
- Blum, J.Y.; Machtou, P.; Esber, S.; Micallef, J.P. Analysis of forces developed during root canal preparation with the balanced force technique. Int. Endod. J. 1997, 30, 386–396. [Google Scholar]
- Kaval, M.E.; Capar, I.D.; Ertas, H. Evaluation of the cyclic fatigue and torsional resistance of novel nickel-titanium rotary files with various alloy properties. J. Endod. 2016, 42, 1840–1843. [Google Scholar] [CrossRef] [PubMed]
- Kaval, M.E.; Capar, I.D.; Ertas, H.; Sen, B.H. Comparative evaluation of cyclic fatigue resistance of four different nickel-titanium rotary files with different cross-sectional designs and alloy properties. Clin. Oral Investig. 2017, 21, 1527–1530. [Google Scholar] [CrossRef] [PubMed]
- Ataya, M.; Ha, J.-H.; Kwak, S.W.; Abu-Tahun, I.H.; Abed, R.E.; Kim, H.-C. Mechanical properties of orifice preflaring nickel-titanium rotary instrument heat treated using T-Wire technology. J. Endod. 2018, 44, 1867–1871. [Google Scholar] [CrossRef]
- Braga, L.C.; Magalhães, R.R.S.; Nakagawa, R.K.L.; Puente, C.G.; Buono, V.T.L.; Bahia, M.G.A. Physical and mechanical properties of twisted or ground nickel–titanium instruments. Int. Endod. J. 2013, 46, 458–465. [Google Scholar] [CrossRef] [PubMed]
- Schäfer, E.; Dzepina, A.; Danesh, G. Bending properties of rotary nickel-titanium instruments. Oral Surg. Oral Med. Oral Pathol. Oral Radiol. Endod. 2003, 96, 757–763. [Google Scholar] [CrossRef]
- Versluis, A.; Kim, H.-C.; Lee, W.; Kim, B.-M.; Lee, C.-J. Flexural stiffness and stresses in nickel-titanium rotary files for various pitch and cross-sectional geometries. J. Endod. 2012, 38, 1399–1403. [Google Scholar] [CrossRef]
- Kim, H.-C.; Lee, M.-H.; Yum, J.; Versluis, A.; Lee, C.-J.; Kim, B.-M. Potential relationship between design of nickel-titanium rotary instruments and vertical root fracture. J. Endod. 2010, 36, 1195–1199. [Google Scholar] [CrossRef]
- Gambarini, G.; Miccoli, G.; D’Angelo, M.; Seracchiani, M.; Obino, F.V.; Reda, R.; Testarelli, L. The relevance of operative torque and torsional resistance of nickel-titanium rotary instruments: A preliminary clinical investigation. Saudi Endod. J. 2020, 10, 260–264. [Google Scholar]
- Mazzoni, A.; Pacifici, A.; Zanza, A.; Giudice, A.D.; Reda, R.; Testarelli, L.; Gambarini, G.; Pacifici, L. Assessment of real-time operative torque during nickel–titanium instrumentation with different lubricants. Appl. Sci. 2020, 10, 6201. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author/Year | Type of Study | Type of Sample | Instrument | Preparation Technique | Result |
|---|---|---|---|---|---|
| Blum et al., 1999 [23] | In vitro | Mandibular incisors | ProFile | Step-back & crown-down | Students > Endodontist (T) Students < Endodontist (F) Step-back > crown-down |
| Blum et al., 1999 [32] | In vitro | Mandibular incisors | ProFile | Step-back & crown-down | Contact area- 10 mm (Step-back) and 5 mm (crown-down) from the tip Step-back > crown-down (T & F) |
| Sattapan et al., 2000 [28] | In vitro | Maxillary/mandibular central and lateral incisors | Quantec Series 2000 | Single file | Small canal > medium canal |
| Peters et al., 2002 [17] | In vitro | Extracted human teeth/plastic blocks | Profile | Crown-down | Straight canal blocks > curved canal blocks > natural teeth (T) Curved canal blocks > natural teeth > straight canal blocks (F) |
| Peters et al., 2003 [29] | In vitro | Maxillary molars | ProTaper | Single-length | F3 > F2 > F1 > S1 > S2 (T) F3 > S1 > F2 > F1 > S2 (F) |
| Blum et al., 2003 [30] | In vitro | Maxillary central incisors/ mandibular central or lateral incisors | ProTaper | Single-Length | Narrow canal > large canal (T) Large canal > narrow canal (F) |
| Hübscher et al., 2003 [31] | In vitro | Maxillary molars | FlexMaster | Crown-down-like modified sequence | Constricted canal > wide canal (T & F) |
| Diemer et al., 2004 [13] | In vitro | Resin blocks | Hero | Single file | Shorter pitch length > longer pitch length (T & F) |
| Da Silva et al., 2005 [34] | In vitro | Maxillary/mandibular central and lateral incisors | Race 720, Race 721, Profile | Single-length | Profile > Race 720 > Race 721 (T & F) |
| Schrader et al., 2005 [33] | In vitro | Plastic blocks | Profile | Crown-down | 35/0.04 had peak T and F in 4% taper sequence 40/0.06 and 35/0.04 had peak T and F in combination of 4% and 6% taper, respectively |
| Peters et al., 2005 [54] | In vitro | Dentin discs | ProFile, ProTaper | Single file | Glyde > Control > EDTA > H2O for ProFile (T) Glyde > H2O > EDTA > Control for ProTaper (T) Glyde > H2O > Control > EDTA for ProFile (F) Control > H2O > Glyde > EDTA for ProTaper (F) ProTaper > ProFile (T) ProFile > ProTaper (F) |
| Boessler et al., 2007 [55] | In vitro | Dentin discs | ProFile | Single file | Dry Control > NaOCL 1% > H2O > HEPB 18% (T) Dry Control > H2O > NaOCL 1% > HEPB 18% (F) |
| Boessler et al., 2009 [56] | In vitro | Dentin discs | ProTaper | Single-length | Electropolished > machined (T) Machined > electropolished (F) |
| Diop et al., 2009 [40] | In vitro | Human cadaveric mandivular central/lateral incisors | ProTaper | Single file | Apical > coronal (T & F) Right > left (F) Posterior > anterior (F) |
| Ha et al., 2010 [15] | In vitro | Resin blocks | K3, Mtwo, NRT, ProFile, ProTaper | Single file | ProTaper > K3 > NRT-safe tip > NRT-active tip > Mtwo > ProFile (F) |
| Son et al., 2010 [18] | In vitro | Resin blocks | ProTaper, ProFile | Single-length | 0° > 10° > 20° > 30° canal curvature (F) |
| Sung et al., 2010 [24] | In vitro | Resin blocks | ProFile, GT rotary, K3 | Single-length | Greater taper > smaller taper (F) |
| Bardsley et al., 2011 [36] | In vitro | Plastic blocks | Vortex | Crown-down | 200 rpm > 400 rpm > 600 rpm (T & F) |
| Peters et al., 2012 [37] | In vitro | Plastic blocks | Hyflex CM | Single-length & crown-down | Single-length > crown-down (T & F) |
| Ha et al., 2012 [8] | In vitro | Endo-training blocks | PathFile, NiTiFlex, ProTaper | Single file | #13 > #15 > #18 > #20 (T & F) |
| Diemer et al., 2013 [19] | In vitro | Resin blocks | HeroShaper, Prototypes | Single file | H6 > H0 > H4 (T) H0 > H6 > H4 (F) |
| Pereira et al., 2013 [41] | In vitro | Plastic blocks | ProTaper Next | Single-length | 250 rpm > 300 rpm > 350 rpm (T & F) |
| Arias et al., 2014 [27] | In vitro | Maxillary incisors/mandibular molars | ProTaper Next, ProTaper Universal | Single-length | Small canals > large canals (T & F) |
| Pereira et al., 2015 [43] | In vitro | Plastic blocks | ProTaper Universal, Profile Vortex, Vortex Blue, Typhoon Infinite Flex | Single-length | Typhoon > ProTaper Universal > Vortex Blue > ProFile Vortex (T) ProTaper Universal > ProFile Vortex > Vortex Blue > Typhoon (F) |
| Ha et al., 2015 [9] | In vitro | Resin block | G-1, G-2, uG glide path files | Single file | G-2 > uG > G-1 (F) |
| Peixoto et al., 2015 [11] | In vitro | Acrylic blocks | Mtwo, Race, ProTaper Universal | Single file | ProTaper Universal > Race > Mtwo (T) ProTaper Universal > Mtwo > Race (F) |
| Arias et al., 2016 [35] | In vitro | Mandibular molars | PathFile, ProGlider | Single-length & Single file | PathFile 1 > PathFile 2 > ProGlider (T & F) ProGlider (16/.02, single file) > PathFile (16/.02, Sequence) (T & F) |
| Moreinos et al., 2016 [59] | In vitro | Simulated metal block canal | Gentlefile, ProTaper Next, Revo-S | Single-length | ProTaper X1 > Revo-S SC2 > Gentlefile 1 (F) Revo-S SC3 > ProTaper X2 > Gentlefile 2 (F) |
| Kwak et al., 2016 [14] | In vitro | Resin blocks | OneG, pG, OneG heat-treated, pG heat-treated glide path files | Single file | pG > OneG > OneG heat-treated > pG heat-treated (F) |
| Ha et al., 2016 [4] | In vitro | Resin blocks | Mtwo, Reciproc 25, ProTaper Universal, ProTaper Next | Single file | Reciproc 25 > ProTaper Universal > ProTaper Next > Mtwo (F) |
| Jamleh et al., 2016 [51] | In vitro | Premolar teeth | Twisted File, Twisted File Adaptive, ProTaper Universal, ProTaper Next | Single-length | ProTaper Universal > ProTaper Next > Twisted File > Twisted File Adaptive (L) |
| Arias et al., 2017 [26] | In vitro | Mandibular molars | PathFile, ProGlider, ProTaper Gold | Single-length | Glide path reduced the torque of shaping files |
| Tokita et al., 2017 [47] | In vitro | Resin canal models | Twisted File Adaptive | Single-length | CR > torque-sensitive reciprocation > time-dependent reciprocation (T) Time-dependent reciprocation > CR > torque-sensitive reciprocation (F) |
| Ha et al., 2017 [45] | In vitro | Resin Canals | One G | Single-length | 4/6 pecking depath > 2/4 pecking depath (F) |
| Fukumori et al., 2018 [22] | In vitro | Resin canals | EndoWave | Single file | EndoWave (30/0.06) > EndoWave (30/0.04) (T & F) |
| Kwak et al., 2018 [25] | In vitro | Resin blocks | WaveOne, WaveOne Gold | Single file | WaveOne > WaveOne Gold (T) Without Glide Path > with Glide Path (T) |
| Jamleh et al., 2018 [58] | In vitro | Maxillary premolar teeth | WaveOne, WaveOne Gold | Single file | WaveOne > WaveOne Gold (F) |
| Nishijo et al., 2018 [50] | In vitro | Endo training blocks | Hyflex EDM Glide Path File (EDM), Hyflex GPF, Scout Race (Race) | Single file | Hyflex EDM Glide Path File > GPF > Race (CR) (F) Hyflex EDM Glide Path File > Race > Hyflex GPF (Reciprocation) (F) |
| Gambarini et al., 2019 [53] | In vitro | Maxillary anterior teeth | Twisted File | Single file | Inward pecking motion > outward brushing motion (T) |
| Abu-Tahun et al., 2019 [46] | In vitro | Resin canals | One G, Hyflex EDM | Single file | No glide path > 5 insertions > 10 insertions > 15 insertions > 20 insertions (T) |
| Kwak et al., 2019 [20] | In vitro | Resin blocks | ProTaper Universal, ProTaper Gold, WaveOne, WaveOne Gold | Single-length & Single file | ProTaper Universal > WaveOne > ProTaper Gold > WaveOne Gold (F) |
| Nayak et al., 2019 [52] | In vitro | Resin blocks | WaveOne Gold, Self-adjusting file, 2Shape | Single-length &single file | WaveOne Gold > 2Shape 2 > 2Shape 1 > self-adjusting file (F) |
| Kwak et al., 2019 [49] | In vitro | Resin blocks | K3XF, Twisted File Adaptive | Single-length | K3XF (CR) > K3XF (adaptive motion) > TFA (adaptive motion) (T) |
| Maki et al., 2019 [42] | In vitro | Resin canal blocks | ProTaper Next | Single-length | High and/or medium-speed > low-speed (clockwise T) High-speed > medium-speed > low-speed (F) |
| Gambarini et al., 2019 [21] | In vivo | Double-rooted maxillary premolars | ProTaper Next, EdgeFile | Single-length | ProTaper Next > EdgeFile (T & preparation time) |
| Bürklein et al., 2019 [39] | In vitro | Maxillary incisors | K-flexofile stainless steel, F6 SkyTaper & EndoPilot, DentaPort ZX OTR, VDW.silver | Balanced-force, single-length | Balanced-force > rotary (F) Rotary > balanced-force (T) No significant differences among 3 motors (T) |
| Almeida et al., 2020 [12] | In vitro | Acrylic blocks | ProTaper Next, ProTaper Universal | Single-length | ProTaper Next X2 > ProTaper Next X1 > ProTaper Universal S1 > ProTaper Universal F1 (T) ProTaper Next X1 > ProTaper Universal S2 > ProTaper Next X2 > ProTaper Universal F1 (F) |
| Maki et al., 2020 [57] | In vitro | Resin blocks | Reciproc, Reciproc Blue | Single file | Reciproc > Reciproc Blue (T & F) |
| Lee et al., 2020 [3] | In vitro | Molars | ProTaper Next, One Curve, Hyflex EDM, Twisted File Adaptive | Single-length | CR > adaptive motion (T) Hyflex EDM > One Curve > ProTaper Next > Twisted File Adaptive (T) |
| Htun et al., 2020 [48] | In vitro | Mandibular incisors | Hyflex EDM glide path file, stainless steel K-file | Single file | CR > OGP > stainless steel manual (T in positive domain) CR > stainless steel manual > OGP (T in negative domain) OGP > stainless steel manual > CR (F in positive domain) OGP > CR > stainless steel manual (F in negative domain) |
| Kimura et al., 2020 [38] | In vitro | Resin blocks | Endowave | Single file, crown-down | Single file (CR) > single file (OTR) (clockwise & counterclockwise T) crown-down (CR) > crown-down (OTR) (clockwise T) crown-down (OTR) > crown-down (CR) (counterclockwise T) |
| Peters et al., 2020 [44] | In vitro | Plastic blocks | TruNatomy, ProTaper Next | Single-length | ProTaper Next X2 > ProTaper Next X3 > ProTaper Next X1 > TruNatomy 36 > TruNatomy 26 > TruNatomy 20 (T) ProTaper Next X1 > ProTaper Next X2 > ProTaper Next X3 > TruNatomy 36 > TruNatomy 26 > TruNatomy 20 (F) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thu, M.; Ebihara, A.; Adel, S.; Okiji, T. Analysis of Torque and Force Induced by Rotary Nickel-Titanium Instruments during Root Canal Preparation: A Systematic Review. Appl. Sci. 2021, 11, 3079. https://doi.org/10.3390/app11073079
Thu M, Ebihara A, Adel S, Okiji T. Analysis of Torque and Force Induced by Rotary Nickel-Titanium Instruments during Root Canal Preparation: A Systematic Review. Applied Sciences. 2021; 11(7):3079. https://doi.org/10.3390/app11073079
Chicago/Turabian StyleThu, Myint, Arata Ebihara, Sherif Adel, and Takashi Okiji. 2021. "Analysis of Torque and Force Induced by Rotary Nickel-Titanium Instruments during Root Canal Preparation: A Systematic Review" Applied Sciences 11, no. 7: 3079. https://doi.org/10.3390/app11073079