
Kinematic Modelling and Motion Analysis of a Humanoid Torso Mechanism




Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
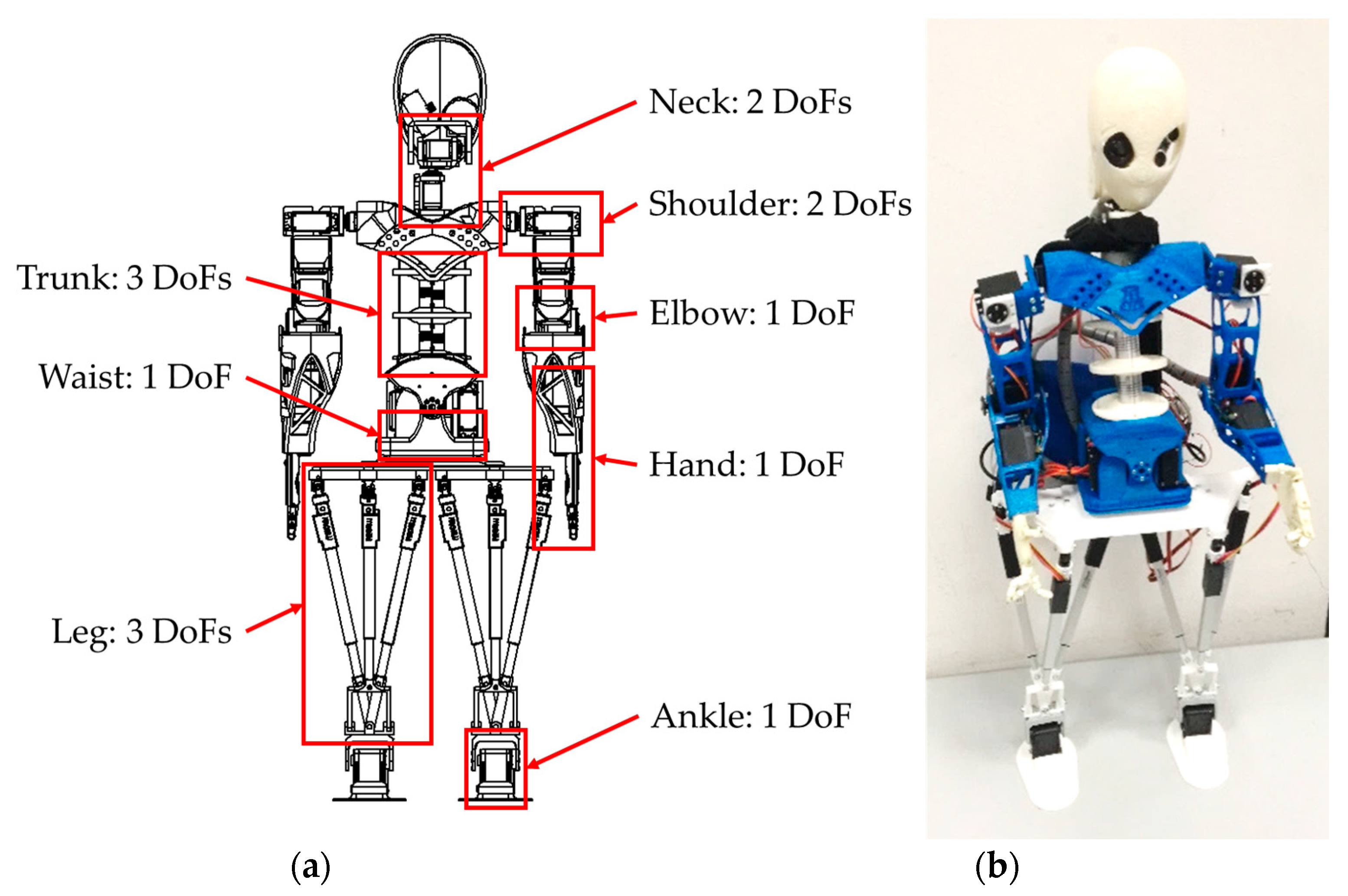
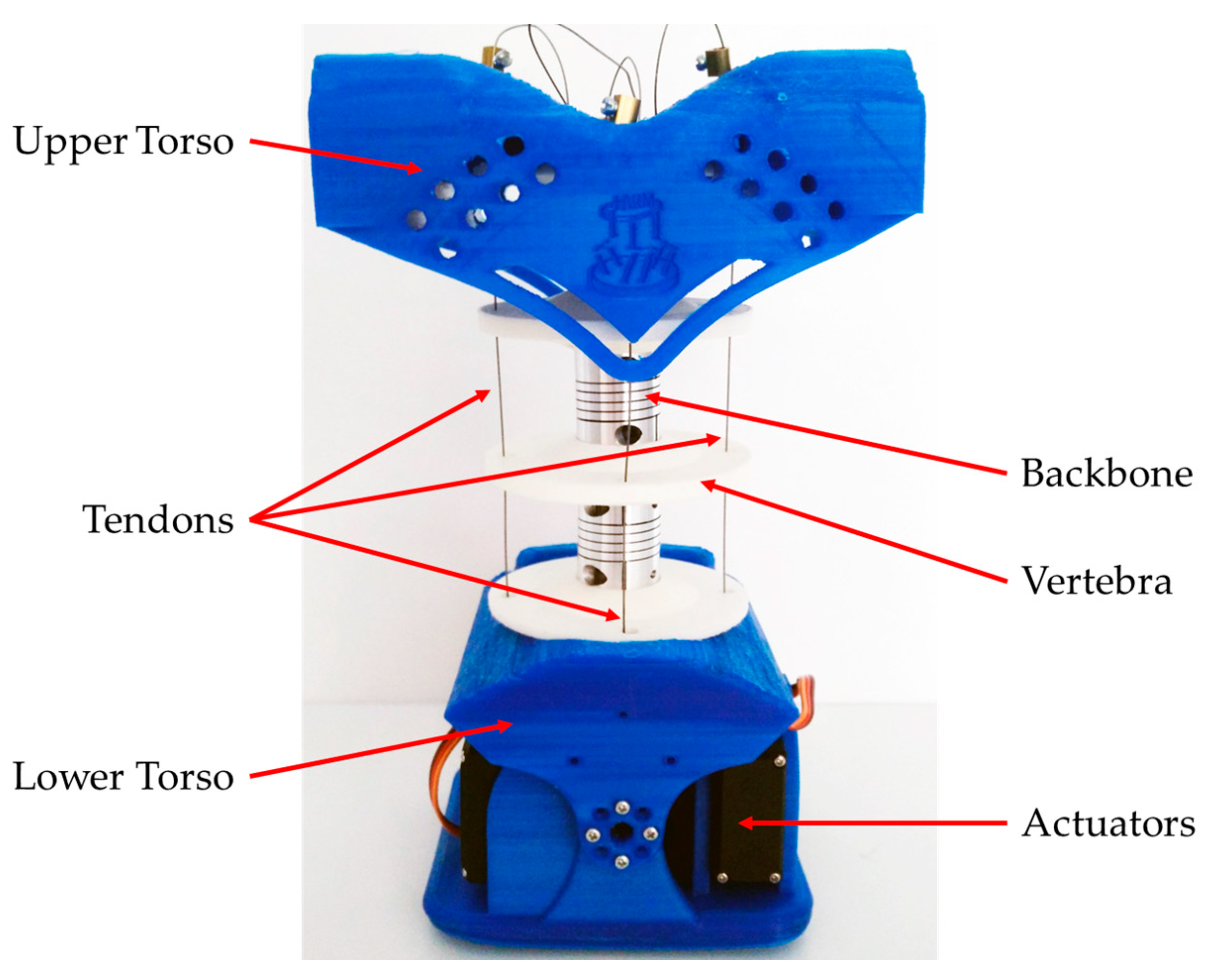
2.1. Mechanical Design of LARMbot’s Torso Mechanism
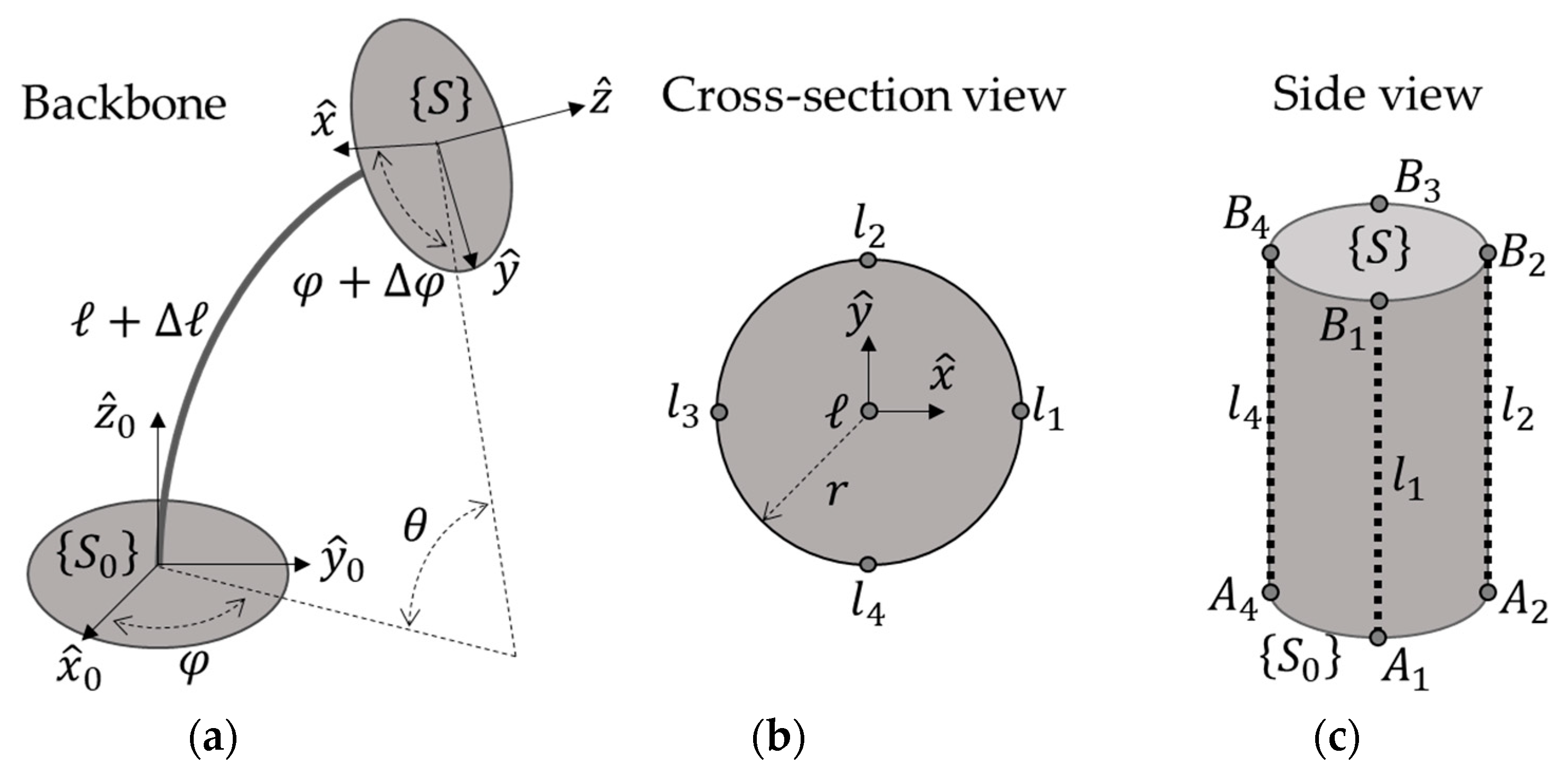
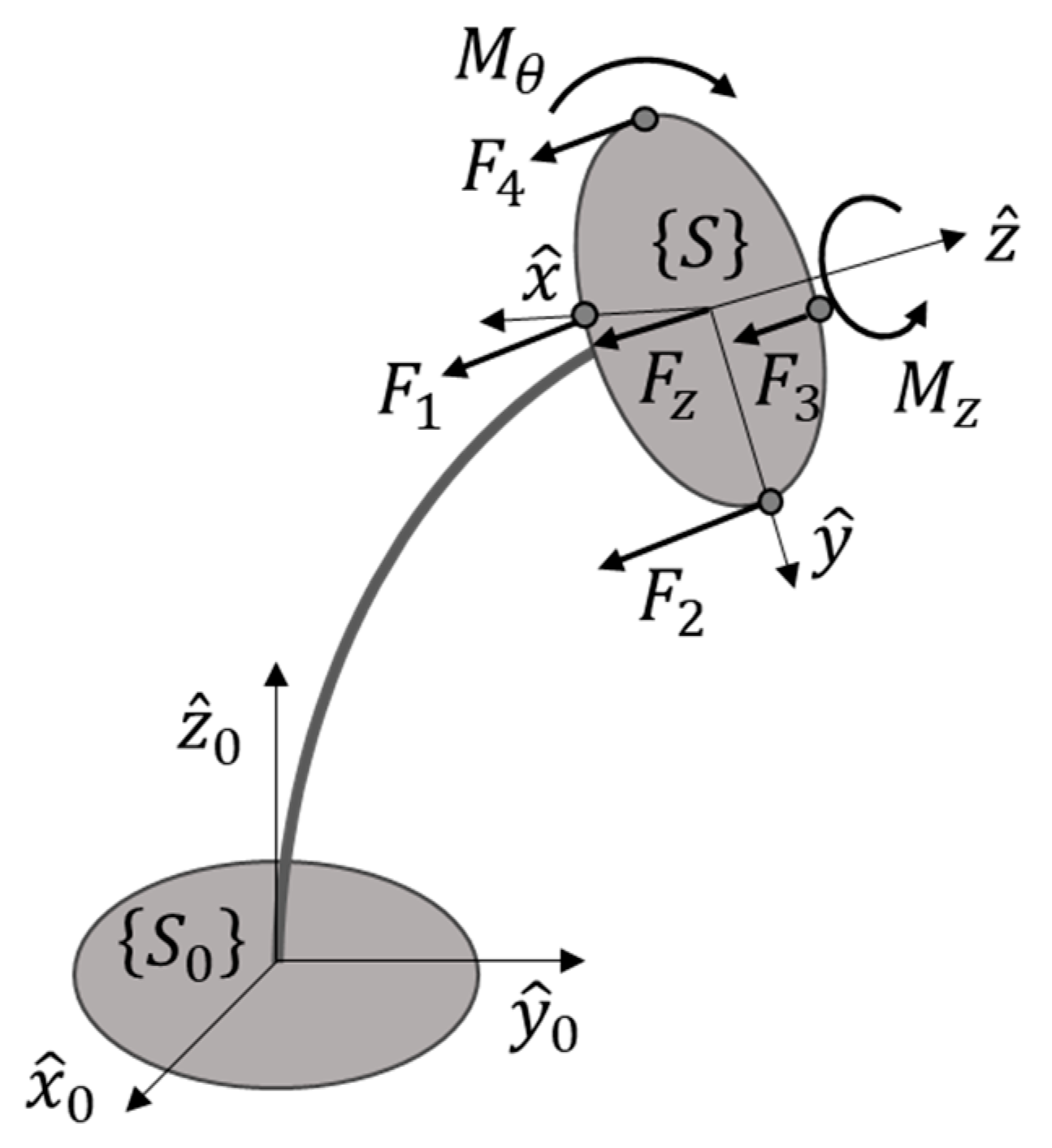
2.2. Kinematic Modelling of a Compliant Tendon-Driven Torso Mechanism
- Backbone bending angle , which is defined as the angle between the x0y0 plane of the lower torso frame {S0} and the xy plane of the upper torso frame {S}.
- Direction of bending , which is defined as the angle between the plane of bending and the x0y0 plane of the lower torso frame {S0}.
- Axial torsion , which is defined as the angle between the x0z0 plane of the lower torso frame {S0} and the xz plane of the upper torso frame {S}.
- Axial elongation/compression , which is defined as the variation of the neutral backbone length caused by the wrench acting on the component.
3. Results
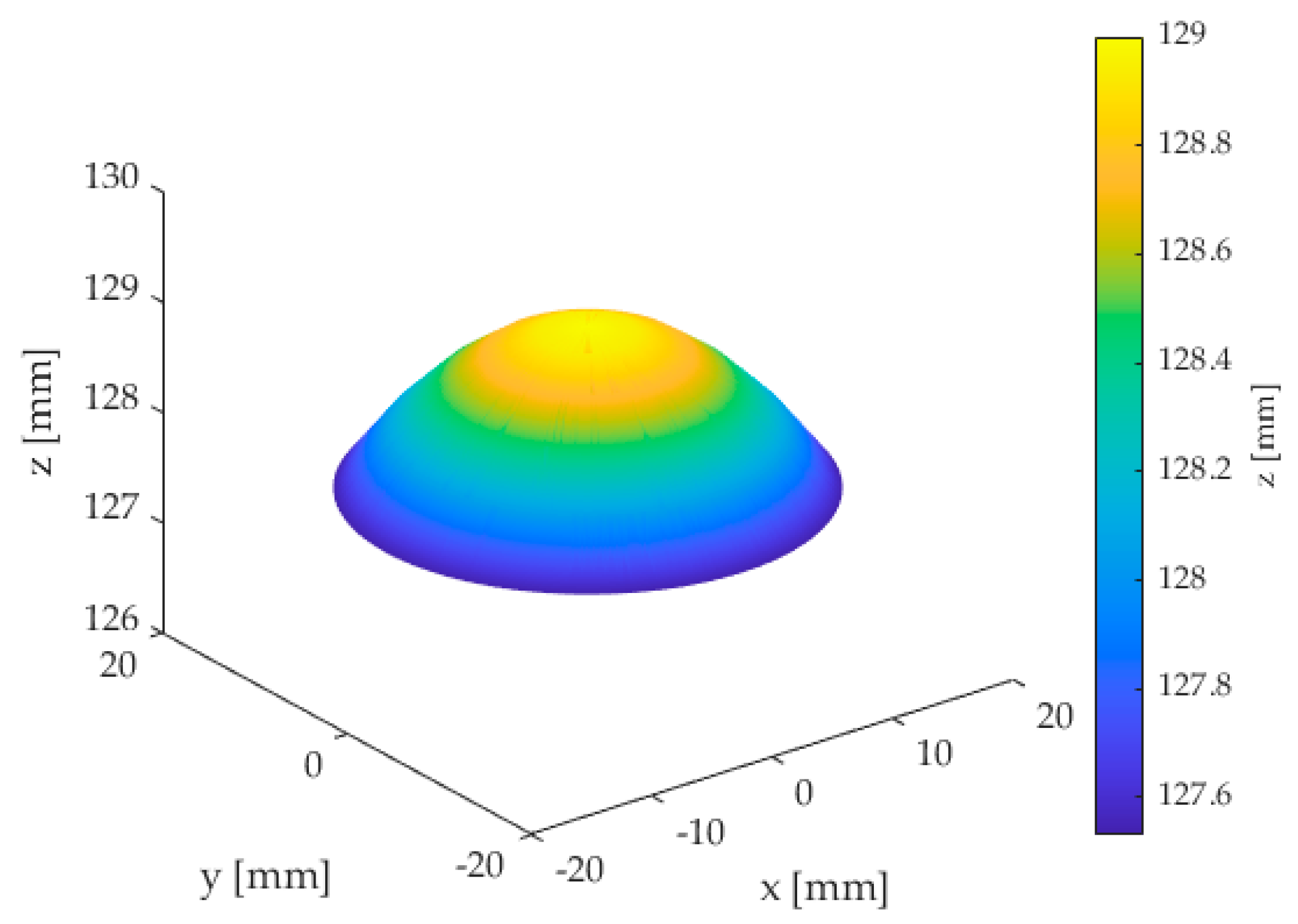
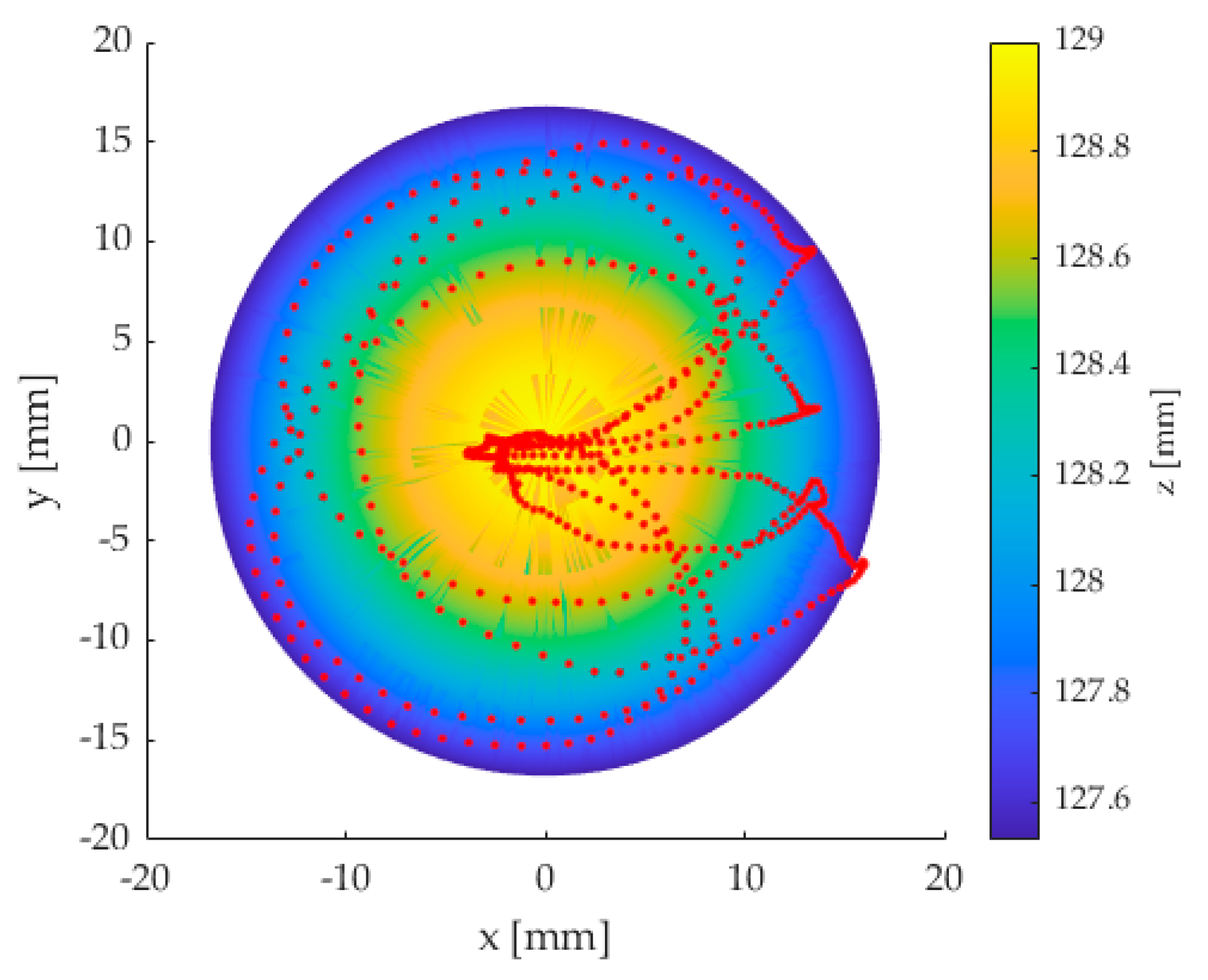
3.1. Workspace of the Proposed Torso Mechanism
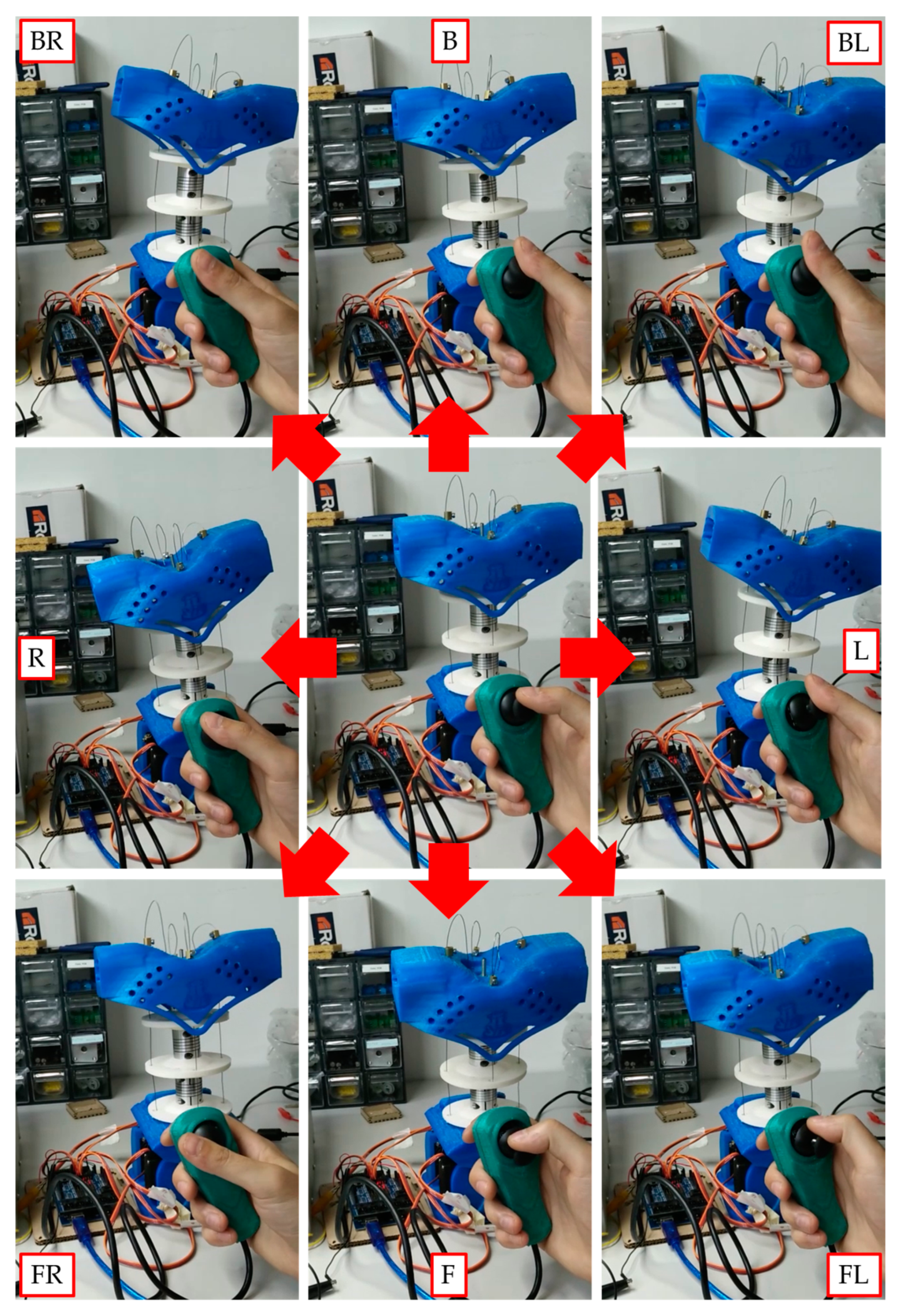
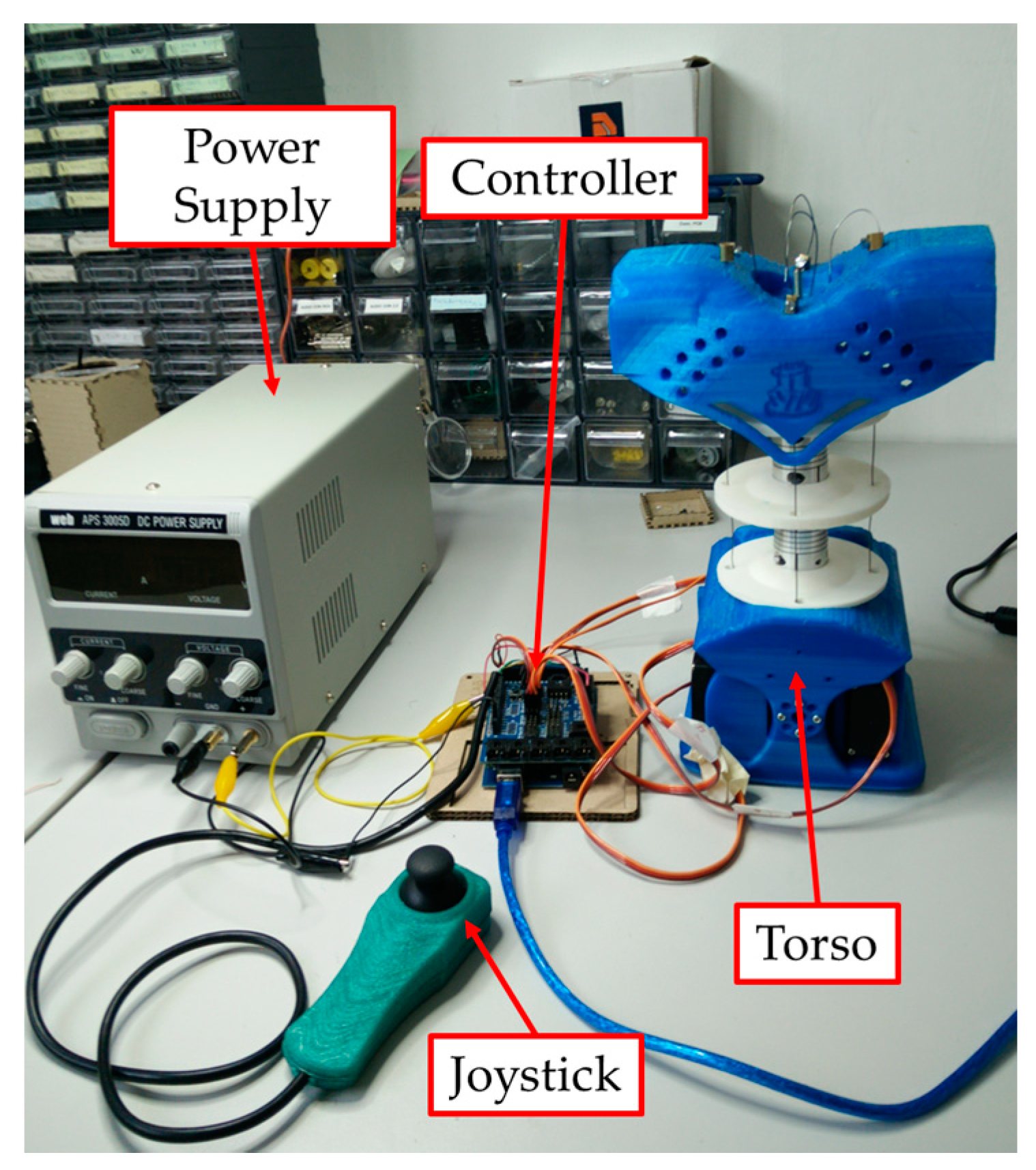
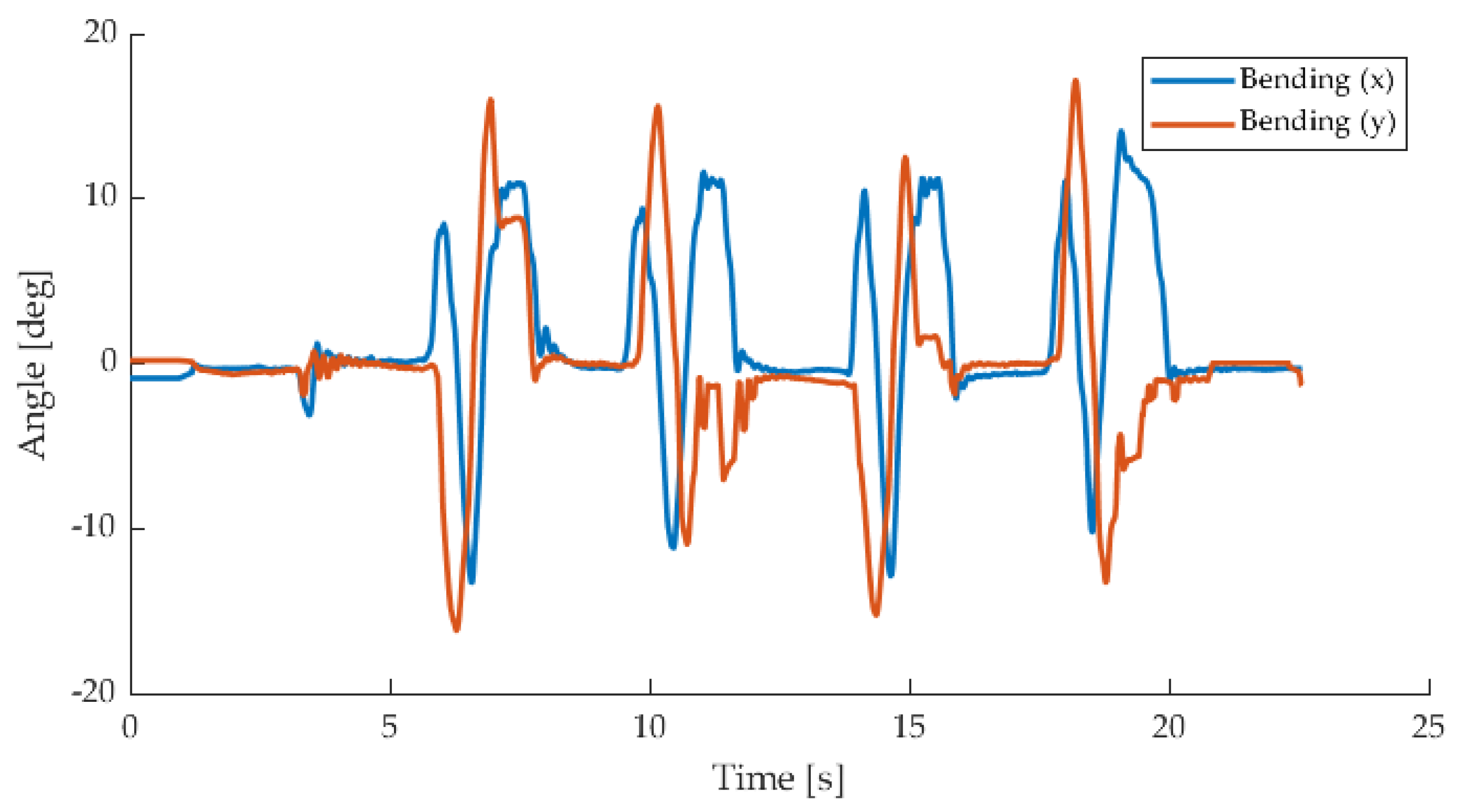
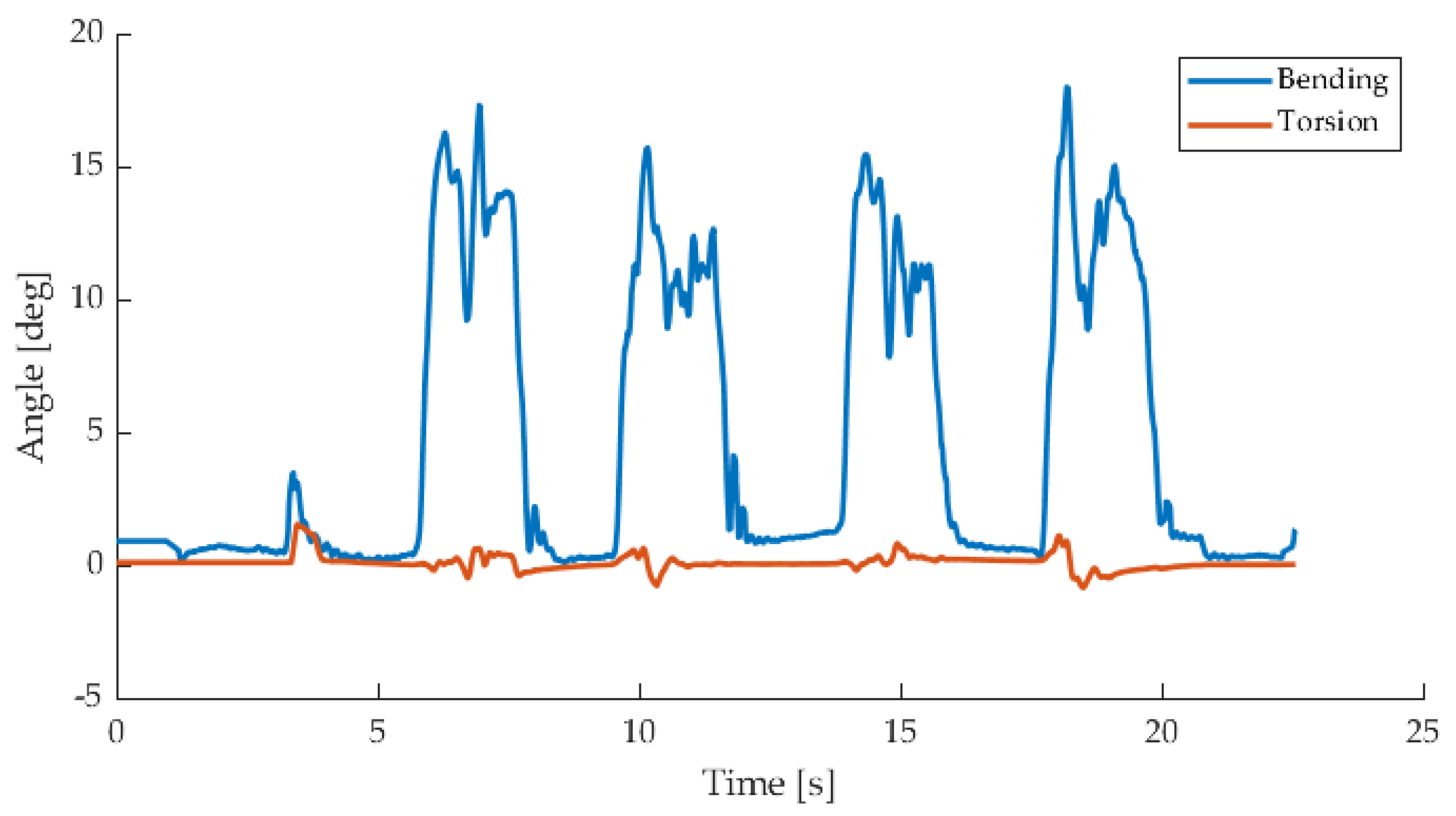
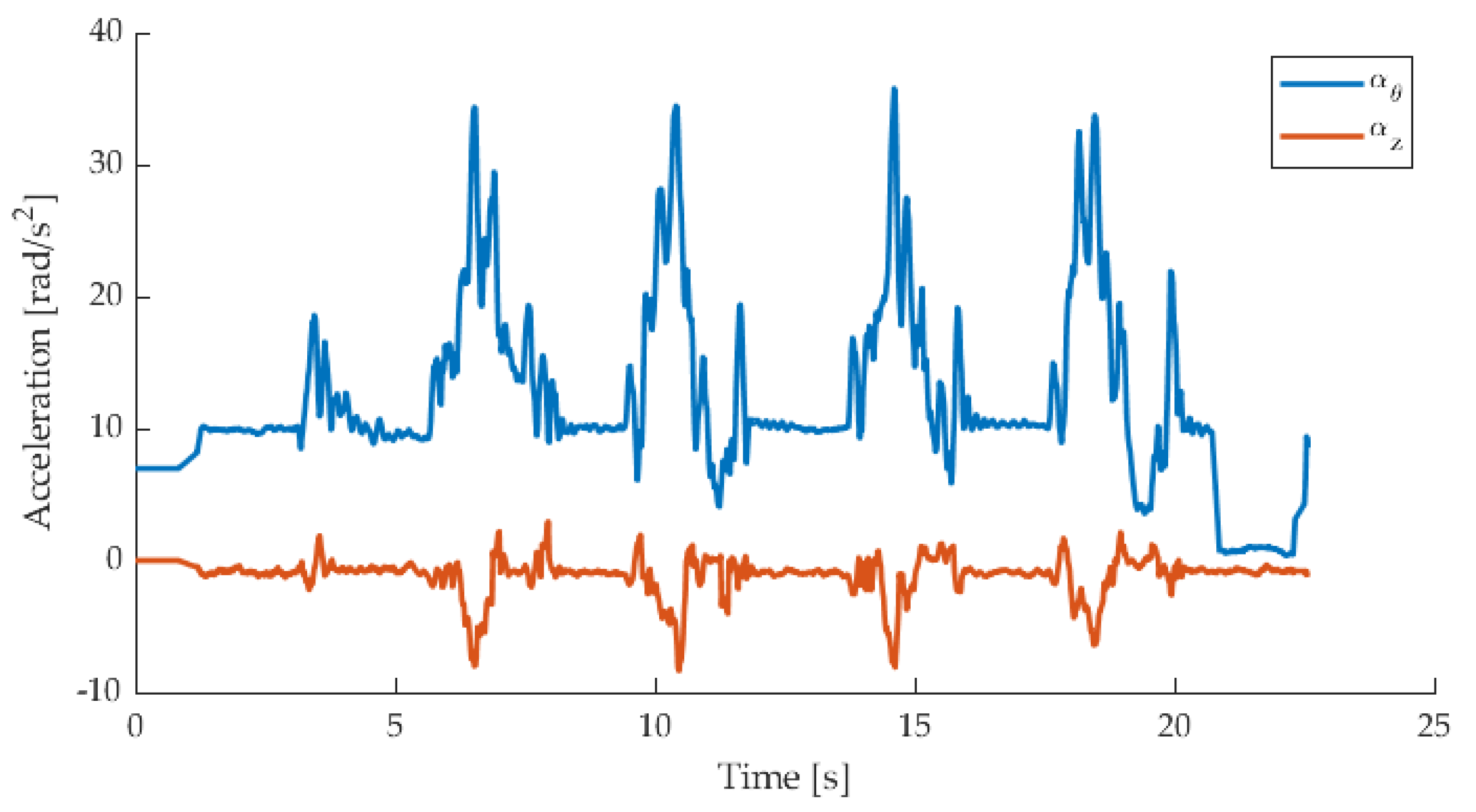
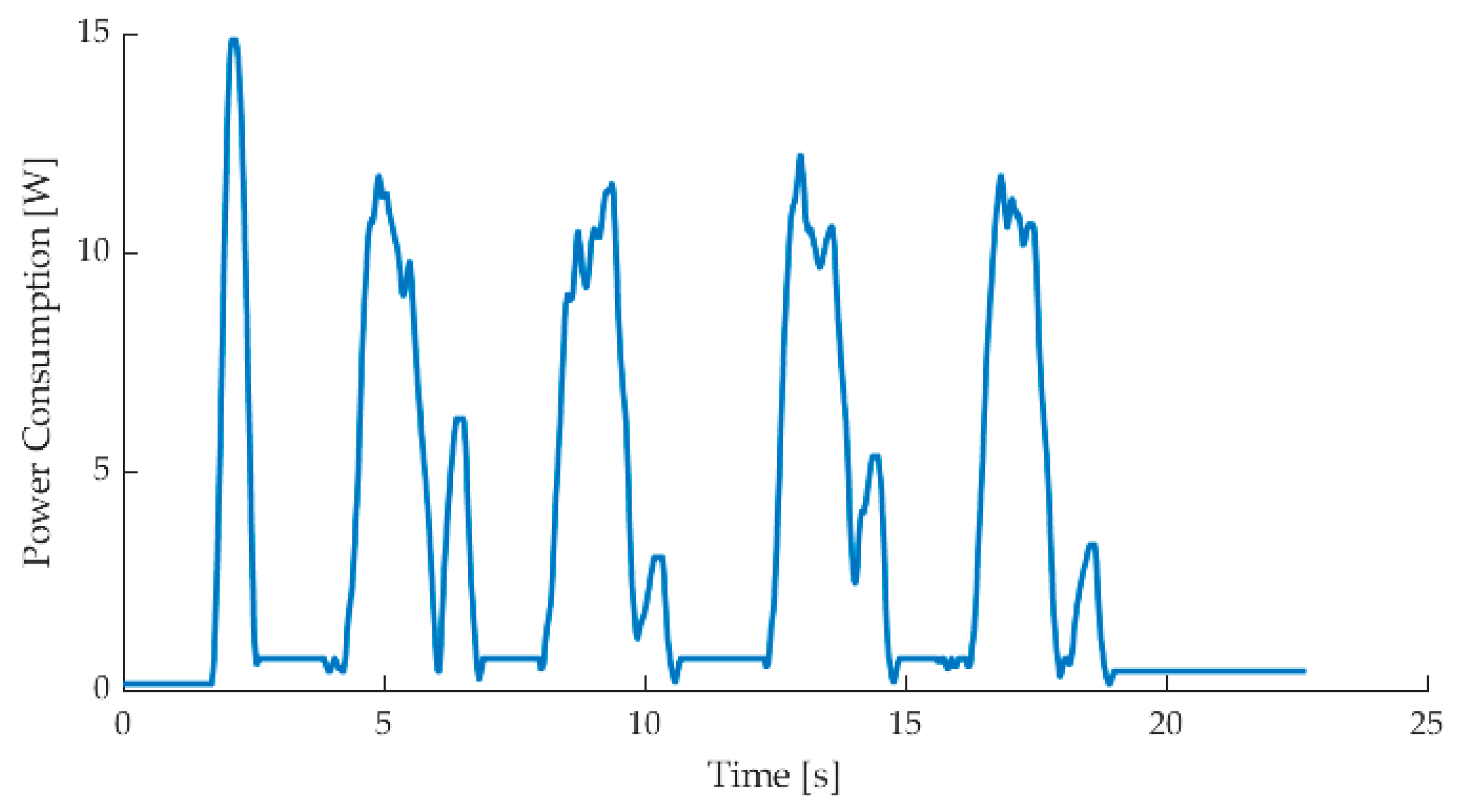
3.2. Experimental Validation
4. Discussion
- Mobility analysis: The mobility of a four-DoF tendon-driven compliant torso mechanism for humanoid robots is analysed to identify its main modes of motion. The degrees of mobility of the robot are further classified as active degrees of freedom, which can be controlled by the action of one or more actuators, and passive degrees of freedom, which depend on the intrinsic stiffness of the system only.
- Kinematic modelling: The proposed constant curvature kinematic model, which is usually used for continuum robots, is used to describe the main bending mode of motion of the spine of the torso. The conventional constant curvature kinematic model is characterised for the analysed system, and an expanded model is here proposed to include backbone elongation and torsion .
- Stiffness modelling: A linearised stiffness model is introduced to create an efficient framework with lumped parameters to relate the deformation of the backbone to the wrench acting on the upper torso of the mechanism. This model also outlines how the axial torsion of the backbone cannot be controlled by the actuation tendons, as it can only be caused by external wrenches.
- Workspace analysis: The behaviour of the torso mechanism is characterised by evaluating its motion limit as a reachable workspace, bending and direction angles, and tendon displacement.
- Joystick mapping: A joystick mapping of the main motion parameters of the proposed kinematic model is proposed, with direction and angle of bending linearly mapped to joystick orientation and magnitude respectively.
- Experimental validation: The workspace computed with the proposed model is confirmed by experiments with the prototype, whose motion is acquired by an onboard inertial measurement unit.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fitzpatrick, P.; Harada, K.; Kemp, C.C.; Matsumoto, Y.; Yokoi, K.; Yoshida, E. Humanoids. In Springer Handbook of Robotics; Springer: Cham, Switzerland, 2016; pp. 1789–1818. [Google Scholar]
- Gulletta, G.; Erlhagen, W.; Bicho, E. Human-like arm motion generation: A Review. Robotics 2020, 9, 102. [Google Scholar] [CrossRef]
- Sakagami, Y.; Watanabe, R.; Aoyama, C.; Matsunaga, S.; Higaki, N.; Fujimura, K. The intelligent ASIMO: System overview and integration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 3, pp. 2478–2483. [Google Scholar]
- Ogura, Y.; Aikawa, H.; Shimomura, K.; Kondo, H.; Morishima, A.; Lim, H.O.; Takanishi, A. Development of a new humanoid robot WABIAN-2. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15–19 May 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 76–81. [Google Scholar]
- Gouaillier, D.; Hugel, V.; Blazevic, P.; Kilner, C.; Monceaux, J.; Lafourcade, P.; Maisonnier, B. Mechatronic design of NAO humanoid. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 769–774. [Google Scholar]
- Pandey, A.K.; Gelin, R. A mass-produced sociable humanoid robot: Pepper: The first machine of its kind. IEEE Robot. Autom. Mag. 2018, 25, 40–48. [Google Scholar] [CrossRef]
- Simonidis, C.; Stelzner, G.N.; Seemann, W. A kinematic study of human torso motion. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Las Vegas, NV, USA, 4–7 September 2007; Volume 48094, pp. 773–780. [Google Scholar]
- Kljuno, E.; Williams, R.L. Humanoid walking robot: Modeling, inverse dynamics, and gain scheduling control. J. Robot. 2010, 2010, 278597. [Google Scholar] [CrossRef] [Green Version]
- Knudson, D. Fundamentals of Biomechanics; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Li, Q.; Yu, Z.; Chen, X.; Meng, F.; Meng, L.; Huang, Q. Dynamic Torso Posture Compliance Control for Standing Balance of Position-Controlled Humanoid Robots. In Proceedings of the 2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM), Shenzhen, China, 18–21 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 529–534. [Google Scholar]
- Kaneko, K.; Kaminaga, H.; Sakaguchi, T.; Kajita, S.; Morisawa, M.; Kumagai, I.; Kanehiro, F. Humanoid robot HRP-5P: An electrically actuated humanoid robot with high-power and wide-range joints. IEEE Robot. Autom. Lett. 2019, 4, 1431–1438. [Google Scholar] [CrossRef]
- Yao, P.; Li, T.; Luo, M.; Zhang, Q.; Tan, Z. Mechanism design of a humanoid robotic torso based on bionic optimization. Int. J. Hum. Robot. 2017, 14, 1750010. [Google Scholar] [CrossRef]
- Cao, B.; Sun, K.; Jin, M.; Huang, C.; Zhang, Y.; Liu, H. Design and development of a two-DOF torso for humanoid robot. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 46–51. [Google Scholar]
- Fiorio, L.; Scalzo, A.; Natale, L.; Metta, G.; Parmiggiani, A. A parallel kinematic mechanism for the torso of a humanoid robot: Design, construction and validation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 681–688. [Google Scholar]
- Cafolla, D.; Ceccarelli, M. Design and simulation of a cable-driven vertebra-based humanoid torso. Int. J. Hum. Robot. 2016, 13, 1650015. [Google Scholar] [CrossRef]
- Cafolla, D.; Ceccarelli, M. An experimental validation of a novel humanoid torso. Robot. Auton. Syst. 2017, 91, 299–313. [Google Scholar] [CrossRef]
- Russo, M.; Cafolla, D.; Ceccarelli, M. Design and experiments of a novel humanoid robot with parallel architectures. Robotics 2018, 7, 79. [Google Scholar] [CrossRef] [Green Version]
- Ceccarelli, M.; Cafolla, D.; Russo, M.; Carbone, G. LARMBot Humanoid Design Towards a Prototype. Moj Int. Jnl Appl. Bionics Biomech. 2017, 1, 00008. [Google Scholar]
- Cafolla, D.; Marco, C. Design and simulation of humanoid Spine. Mech. Mach. Sci. 2015, 24, 585–593. [Google Scholar]
- Cafolla, D.; Ceccarelli, M. Design and FEM analysis of a novel humanoid torso. Mech. Mach. Sci. 2015, 25, 477–488. [Google Scholar]
- Li, C.; Gu, X.; Ren, H. A cable-driven flexible robotic grasper with lego-like modular and reconfigurable joints. IEEE/ASME Trans. Mechatron. 2017, 22, 2757–2767. [Google Scholar] [CrossRef]
- Russo, M.; Ceccarelli, M. Analysis of a Wearable Robotic System for Ankle Rehabilitation. Machines 2020, 8, 48. [Google Scholar] [CrossRef]
- Amanov, E.; Nguyen, T.D.; Burgner-Kahrs, J. Tendon-driven continuum robots with extensible sections—A model-based evaluation of path-following motions. Int. J. Robot. Res. 2019. [Google Scholar] [CrossRef]
- Russo, M.; Raimondi, L.; Dong, X.; Axinte, D.; Kell, J. Task-oriented optimal dimensional synthesis of robotic manipulators with limited mobility. Robot. Comput. Integr. Manuf. 2021, 69, 102096. [Google Scholar] [CrossRef]
- Webster, R.J., III; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Gonthina, P.S.; Kapadia, A.D.; Godage, I.S.; Walker, I.D. Modeling variable curvature parallel continuum robots using euler curves. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1679–1685. [Google Scholar]
- Mahl, T.; Hildebrandt, A.; Sawodny, O. A variable curvature continuum kinematics for kinematic control of the bionic handling assistant. IEEE Trans. Robot. 2014, 30, 935–949. [Google Scholar] [CrossRef]
- Garriga-Casanovas, A.; Rodriguez y Baena, F. Kinematics of continuum robots with constant curvature bending and extension capabilities. J. Mech. Robot. 2019, 11, 011010. [Google Scholar] [CrossRef] [Green Version]
- Russo, M.; Ceccarelli, M.; Takeda, Y. Force transmission and constraint analysis of a 3-SPR parallel manipulator. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 4399–4409. [Google Scholar] [CrossRef]
- Cafolla, D.; Ceccarelli, M. Characteristics and Performance of CAUTO (CAssino hUmanoid TOrso) Prototype. Inventions 2017, 2, 17. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Width [mm] | Depth [mm] | Height [mm] |
| 200 | 150 | 300 |
| Mass [kg] | Backbone Mobility | Actuators |
| 1.200 | 4 Degrees of Freedom 1 | 4 Servomotors 2 |
| Backbone Length | Bending Angle | Bending Direction |
| 129.0 mm | [0; 15] deg | [0; 360] deg |
| Backbone compression | Tendon length | Tendon radius |
| 0.0 mm | [120.0; 138.0] mm | 34.0 mm |
| Maximum Angular Value | Maximum Acceleration | |
|---|---|---|
| Backbone bending | = 17.95 deg | = 35.75 rad/s2 |
| Backbone torsion | = 1.54 deg | = 8.32 rad/s2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Russo, M.; Ceccarelli, M.; Cafolla, D. Kinematic Modelling and Motion Analysis of a Humanoid Torso Mechanism. Appl. Sci. 2021, 11, 2607. https://doi.org/10.3390/app11062607
Russo M, Ceccarelli M, Cafolla D. Kinematic Modelling and Motion Analysis of a Humanoid Torso Mechanism. Applied Sciences. 2021; 11(6):2607. https://doi.org/10.3390/app11062607
Chicago/Turabian StyleRusso, Matteo, Marco Ceccarelli, and Daniele Cafolla. 2021. "Kinematic Modelling and Motion Analysis of a Humanoid Torso Mechanism" Applied Sciences 11, no. 6: 2607. https://doi.org/10.3390/app11062607