
Online Intelligent Perception of Pantograph and Catenary System Status Based on Parameter Adaptation


Abstract
:1. Introduction
- Based on the parameter adaptive perception, a reliable analysis framework of the PCS contact state that satisfies the safety supervision of train outdoor operation is proposed.
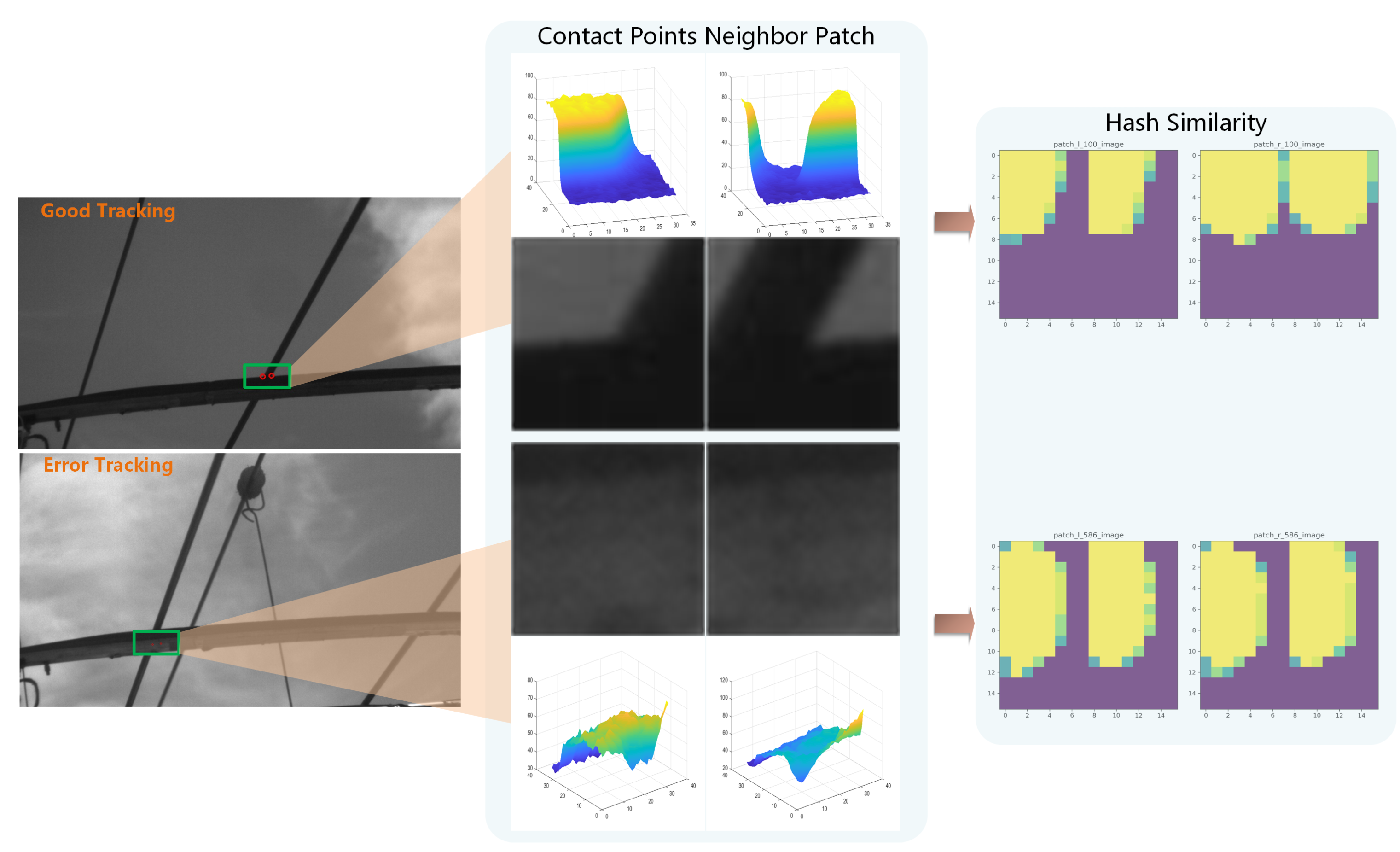
- By constructing closed-loop tracking, ensuring that the tracking parameters can be updated according to the feedback of collected image, long-term stable, high-speed, and high-precision contact point positioning is achieved.
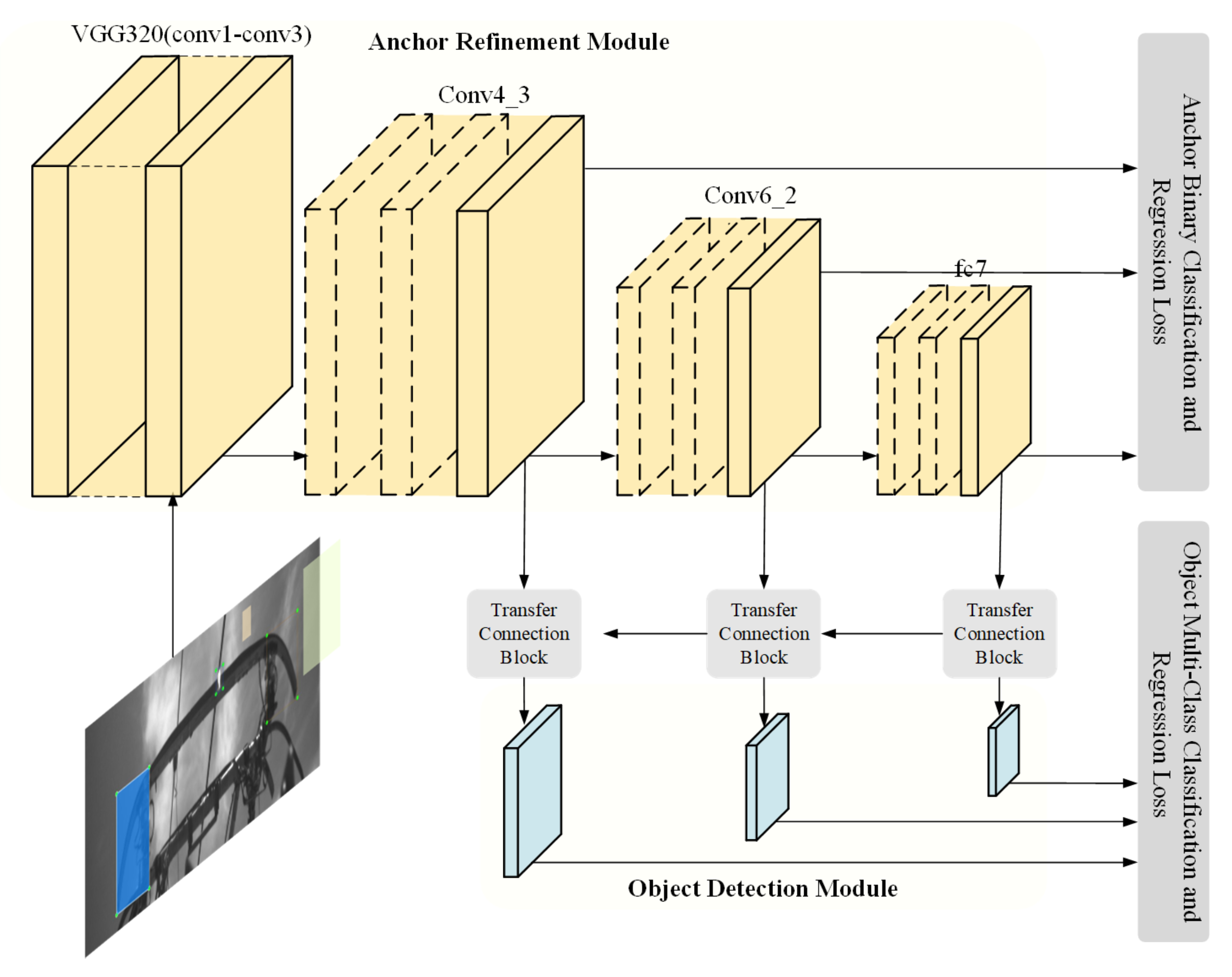
- Through the use of a pruned RefineDet [20]—an optimized deep learning object detection method, we achieved robust real-time positioning of pantograph horns and sparks.
- The method we proposed can effectively obtain the PCS contact parameters and contact state analysis during the long-term outdoor operation of trains, supporting the safe and stable operation of railways.
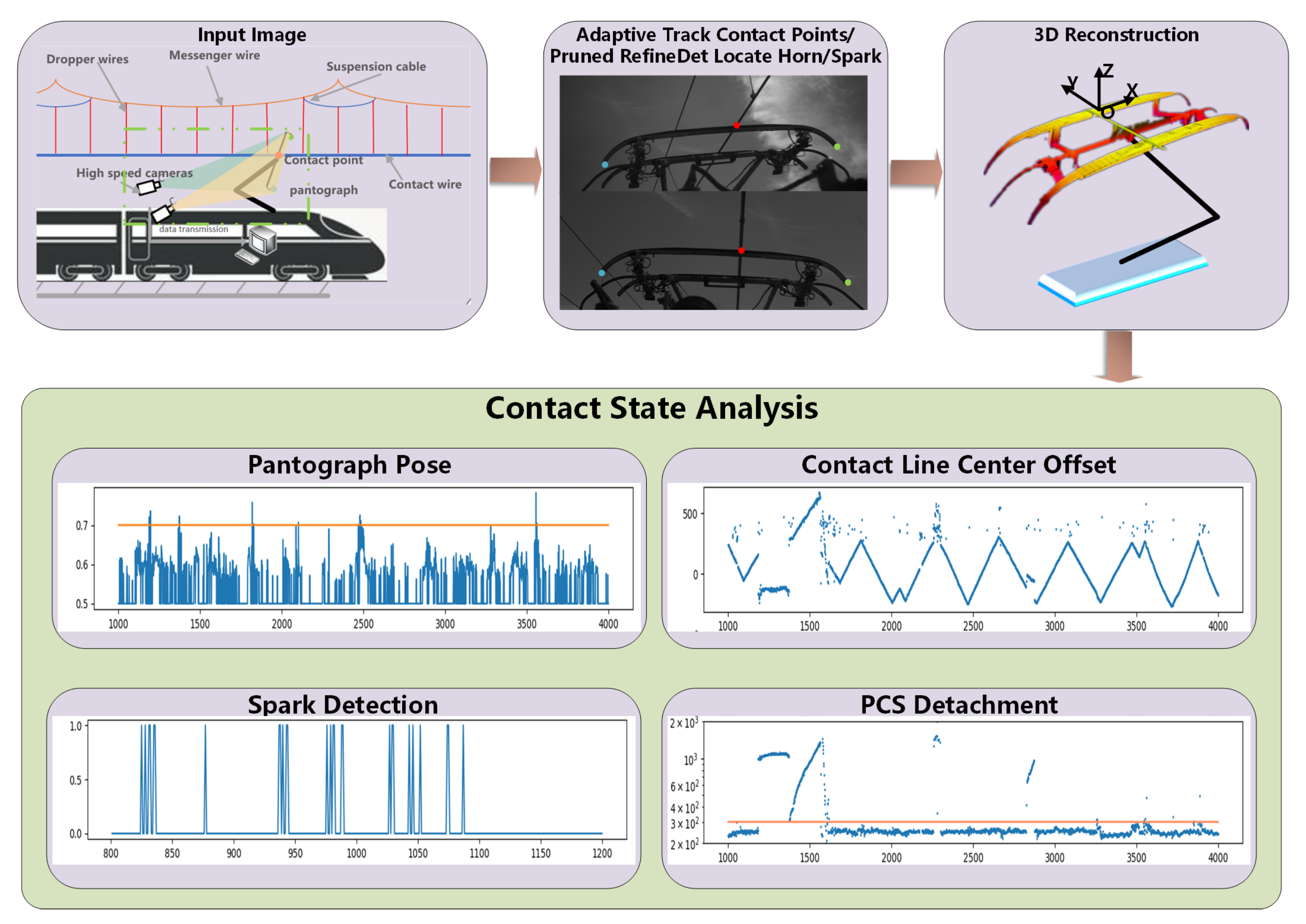
2. Overview
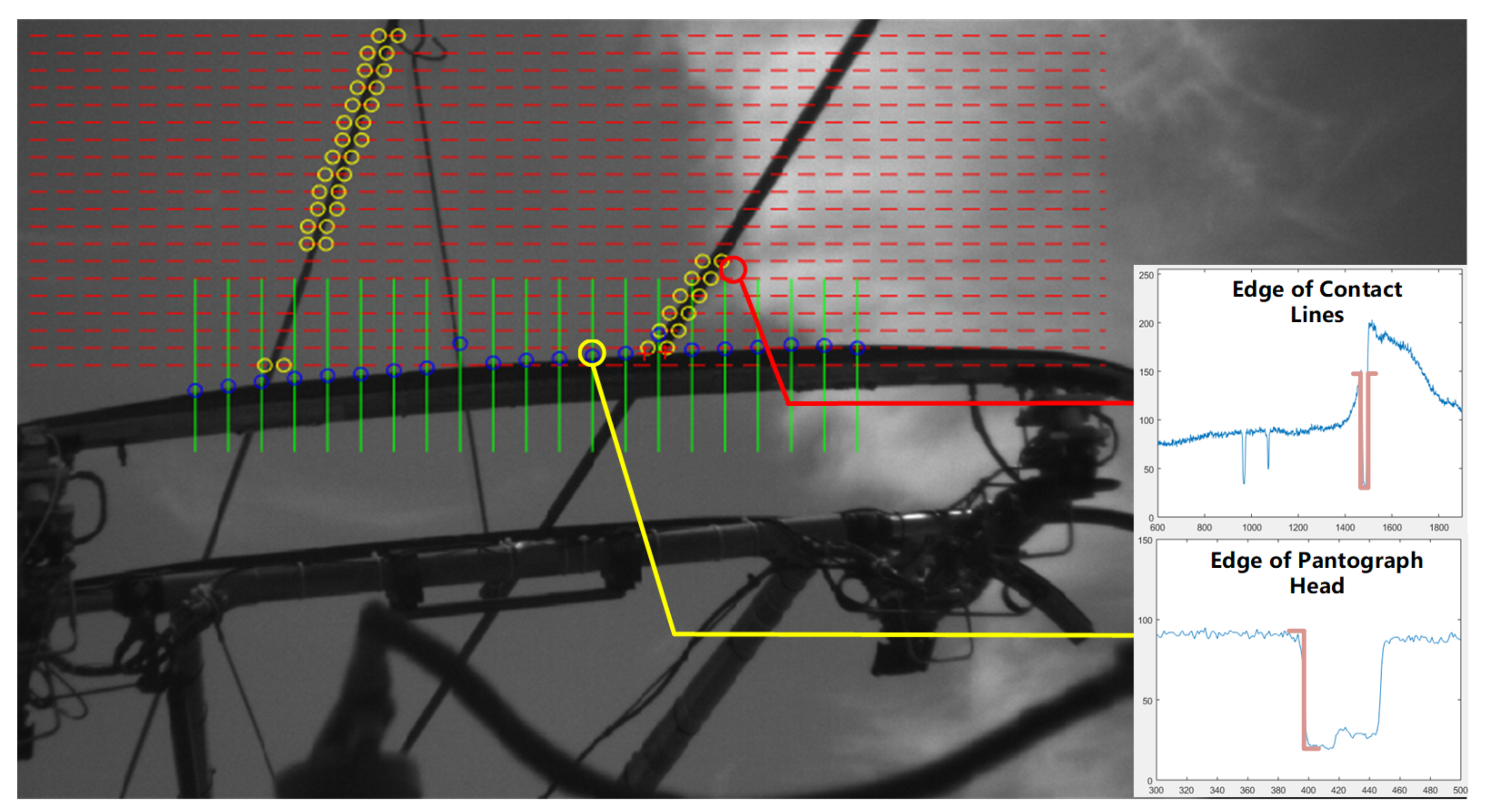
3. Long-Term Feature Points Localization
3.1. Adaptive Contact Points Tracking
3.2. Pantograph Horn and Spark Localization
4. PCS State Analysis Module
| Algorithm 1 PCS State Analysis Algorithm Pseudopod. |
|
5. Experiment
5.1. Results of the Tracking of Contact Points
5.1.1. Ablation Study
5.1.2. Tracking Result Compared with State-of-the-Art Tracking Method
5.2. Results of the Pantograph Horn and Spark Localization
5.3. PCS Contact State Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PCS | Pantograph and Catenary System |
| RIOM | Intelligent Operation and Maintenance of Railways |
References
- Yaman, O.; Karakose, M.; Aydin, I.; Akin, E. Image processing and model based arc detection in pantograph catenary systems. In Proceedings of the Signal Processing and Communications Applications Conference, Trabzon, Turkey, 23–25 April 2014; pp. 1934–1937. [Google Scholar]
- Gao, S.; Wang, Y.; Liu, Z.; Mu, X.; Huang, K.; Song, X. Thermal Distribution Modeling and Experimental Verification of Contact Wire Considering the Lifting or Dropping Pantograph in Electrified Railway. IEEE Trans. Transp. Electrif. 2016, 2, 256–265. [Google Scholar] [CrossRef]
- Fukai, H.; Watabe, Y.; Niwakawa, M.; Tabayashi, S. Automatic correction of measurement position using robust matching in contact wire inspection system. In Proceedings of the 2016 11th France-Japan & 9th Europe-Asia Congress on Mechatronics (MECATRONICS)/17th International Conference on Research and Education in Mechatronics (REM), Compiegne, France, 15–17 June 2016; pp. 193–196. [Google Scholar]
- Yuan, F.Q.; Lu, J.M. Data-driven model development using Support Vector Machine for railway Overhead Contact Wire maintenance. In Proceedings of the IEEE International Conference on Industrial Engineering and Engineering Management, Singapore, 6–9 December 2016; pp. 78–82. [Google Scholar]
- Na, K.M.; Lee, K.; Shin, S.K.; Kim, H. Detecting Deformation on Pantograph Contact Strip of Railway Vehicle on Image Processing and Deep Learning. Appl. Sci. 2020, 10, 8509. [Google Scholar] [CrossRef]
- Luo, Y.; Yang, Q.; Liu, S. Novel Vision-Based Abnormal Behavior Localization of Pantograph-Catenary for High-Speed Trains. IEEE Access 2019, 7, 180935–180946. [Google Scholar] [CrossRef]
- Yao, Y.; Zou, D.; Zhou, N.; Mei, G.; Wang, J.; Zhang, W. A study on the mechanism of vehicle body vibration affecting the dynamic interaction in the pantograph–catenary system. Veh. Syst. Dyn. 2020, 1–20. [Google Scholar] [CrossRef]
- Huang, C.; Wang, A.; Gu, X.; Gao, X.; He, Y.; Liu, L.; Gao, F. High-Frequency Vibration Analysis and Optimization of Irregular Wear of Pantograph Carbon Strips. Shock Vib. 2020, 2020, 8850079. [Google Scholar] [CrossRef]
- Zhou, N.; Yang, W.; Liu, J.; Zhang, W.; Wang, D. Investigation on monitoring system for pantograph and catenary based on condition-based recognition of pantograph. Shock Vib. 2019, 2019, 3839191. [Google Scholar] [CrossRef]
- Yu, X.; Su, H. Pantograph Arc Detection of Urban Rail Based on Photoelectric Conversion Mechanism. IEEE Access 2020, 8, 14489–14499. [Google Scholar] [CrossRef]
- Huang, S.; Zhai, Y.; Zhang, M.; Hou, X. Arc Detection and Recognition in Pantograph-Catenary System based on Convolutional Neural Network. Inf. Sci. 2019, 501, 363–376. [Google Scholar] [CrossRef]
- Lu, P.; Huo, C.; Duan, W.; Ai, J.; Jin, H.; Jin, L. Information fusion and image processing based arc detection and localization in pantograph-catenary systems. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–8. [Google Scholar]
- Facchinetti, A.; Mauri, M. Hardware-in-the-Loop Overhead Line Emulator for Active Pantograph Testing. IEEE Trans. Ind. Electron. 2009, 56, 4071–4078. [Google Scholar] [CrossRef]
- Wei, X.; Jiang, S.; Li, Y.; Li, C.; Jia, L.; Li, Y. Defect Detection of Pantograph Slide Based on Deep Learning and Image Processing Technology. IEEE Trans. Intell. Transp. Syst. 2019, 21, 947–958. [Google Scholar] [CrossRef]
- Aydin, I.; Karakose, M.; Akin, E. A Robust Anomaly Detection in Pantograph-Catenary System Based on Mean-Shift Tracking and Foreground Detection. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2014; pp. 4444–4449. [Google Scholar]
- Aydin, I.; Karakose, M.; Akin, E. A New Contactless Fault Diagnosis Approach for Pantograph-Catenary System Using Pattern Recognition and Image Processing Methods. Adv. Electr. Comput. Eng. 2014, 14, 79–88. [Google Scholar] [CrossRef]
- Karakose, E.; Gencoglu, M.T.; Karakose, M.; Aydin, I.; Akin, E. A New Experimental Approach Using Image Processing Based Tracking for an Efficient Fault Diagnosis in Pantograph-Catenary Systems. IEEE Trans. Ind. Inform. 2016, 13, 635–643. [Google Scholar] [CrossRef]
- Cho, C.J.; Ko, H. Video-Based Dynamic Stagger Measurement of Railway Overhead Power Lines Using Rotation-Invariant Feature Matching. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1294–1304. [Google Scholar] [CrossRef]
- Shen, Y.; Liu, Z.; Zhang, G. PAC Interaction Inspection Using Real-Time Contact Point Tracking. IEEE Trans. Instrum. Meas. 2019, 68, 4051–4064. [Google Scholar] [CrossRef]
- Zhang, S.; Wen, L.; Bian, X.; Lei, Z.; Li, S.Z. Single-Shot Refinement Neural Network for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4203–4212. [Google Scholar]
- Henriques, J.F.; Rui, C.; Martins, P.; Batista, J. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lv, X.; Wang, Z.J. Perceptual Image Hashing Based on Shape Contexts and Local Feature Points. IEEE Trans. Inf. Forensics Secur. 2012, 7, 1081–1093. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Kalal, Z.; Matas, J.; Mikolajczyk, K. P-N learning: Bootstrapping binary classifiers by structural constraints. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 49–56. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 2544–2550. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Speed (FPS) | Success Rate | Missing Rate | Error Rate | Accuracy (pixel) | Success_50 Rate |
|---|---|---|---|---|---|---|
| global method | 67.62 | 31.96% | 3.26% | 64.77% | 3.083 | 87.30% |
| global+l1 | 88.48 | 89.63% | 0.40% | 9.97% | 0.212 | 94.58% |
| local+global+l1 | 247.50 | 69.55% | 0.81% | 29.64% | 1.616 | 94.08% |
| our method | 175.80 | 87.91% | 3.31% | 11.75% | 0.399 | 95.89% |
| Detect Mode | Detect | Pruning-Detect | Detect-Aug | Detect-Prun-Aug |
|---|---|---|---|---|
| left | 0.62 | 0.62 | 0.78 | 0.74 |
| right | 0.61 | 0.56 | 0.80 | 0.80 |
| both | 0.70 | 0.65 | 0.87 | 0.90 |
| Internal Parameters | External Parameters | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Parameters | ||||||||||
| 4226.17 | 4270.22 | 0.955 | −0.111 | 0.273 | −973.25 | 0.939 | 0.052 | 0.340 | −770.96 | |
| 4226.39 | 4278.11 | |||||||||
| 1177.99 | 1156.43 | 0.111 | 0.994 | 0.016 | −34.92 | −0.047 | 0.999 | −0.022 | 4328.53 | |
| 932.03 | 943.39 | |||||||||
| 0.384 | 0.323 | −0.274 | 0.014 | 0.962 | 95.22 | −0.341 | 0.004 | 0.940 | 0.01 | |
| 0 | 0 | |||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Pan, X.; Chang, L. Online Intelligent Perception of Pantograph and Catenary System Status Based on Parameter Adaptation. Appl. Sci. 2021, 11, 1948. https://doi.org/10.3390/app11041948
Shen Y, Pan X, Chang L. Online Intelligent Perception of Pantograph and Catenary System Status Based on Parameter Adaptation. Applied Sciences. 2021; 11(4):1948. https://doi.org/10.3390/app11041948
Chicago/Turabian StyleShen, Yuan, Xiao Pan, and Luonan Chang. 2021. "Online Intelligent Perception of Pantograph and Catenary System Status Based on Parameter Adaptation" Applied Sciences 11, no. 4: 1948. https://doi.org/10.3390/app11041948