
A Study on Deep Learning Application of Vibration Data and Visualization of Defects for Predictive Maintenance of Gravity Acceleration Equipment

 ,
,  ,
,  , ,
, ,
Abstract
:1. Introduction
Related Work
2. Proposed Method and Environment
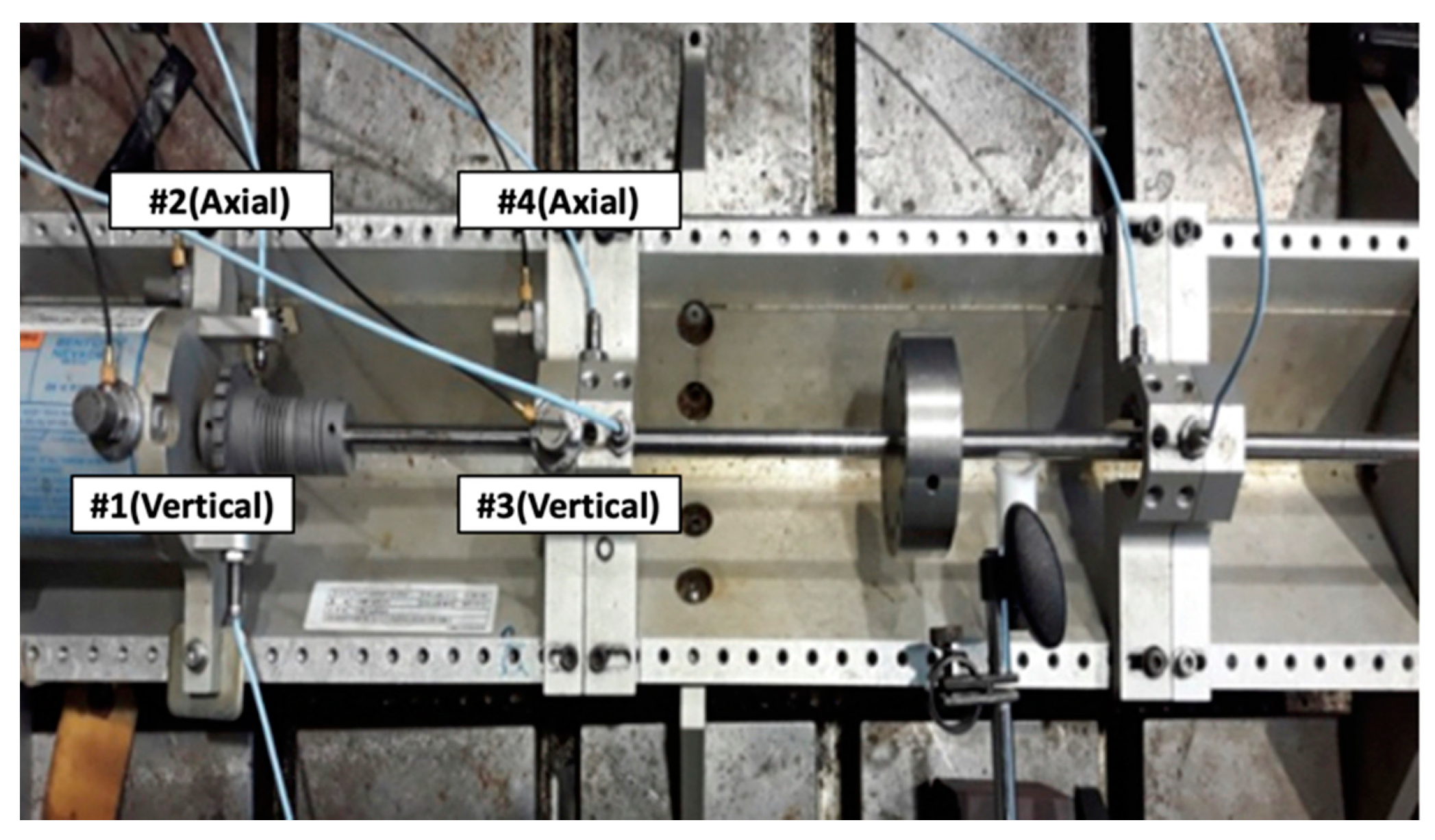
2.1. Design and Fabrication of Experimental Rotating Equipment
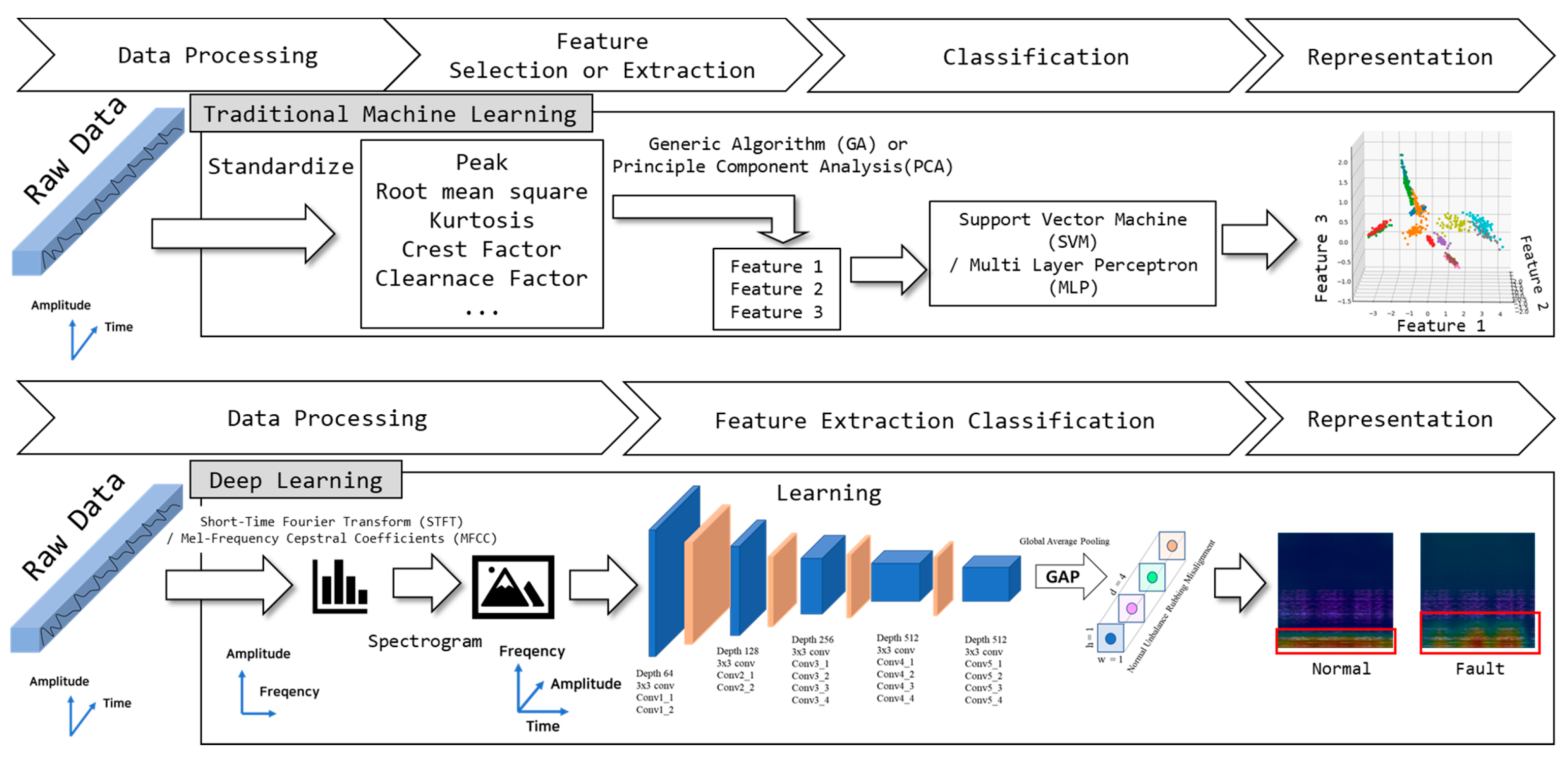
2.2. Proposed Method
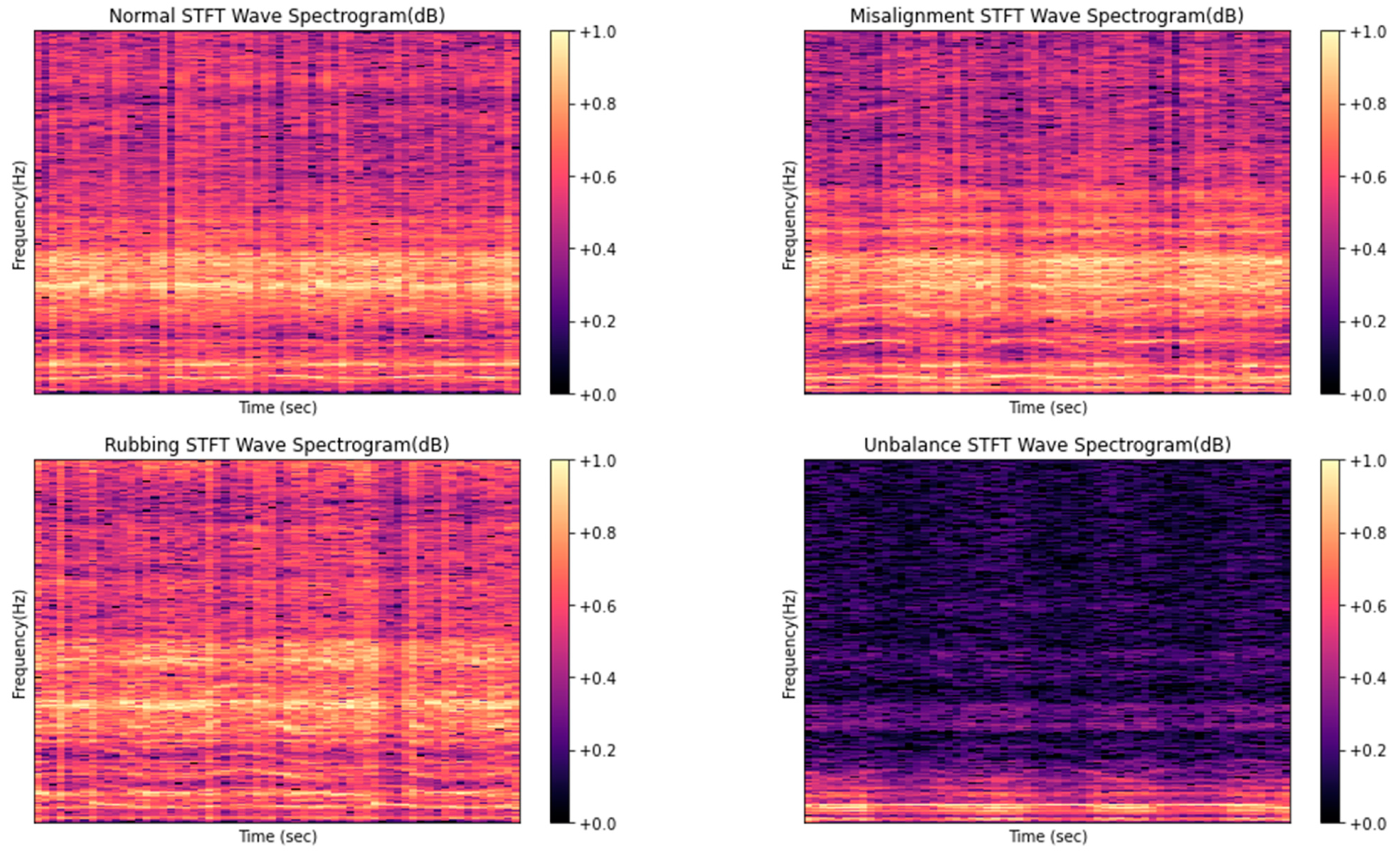
2.2.1. STFT (Short-Time Fourier Transform)
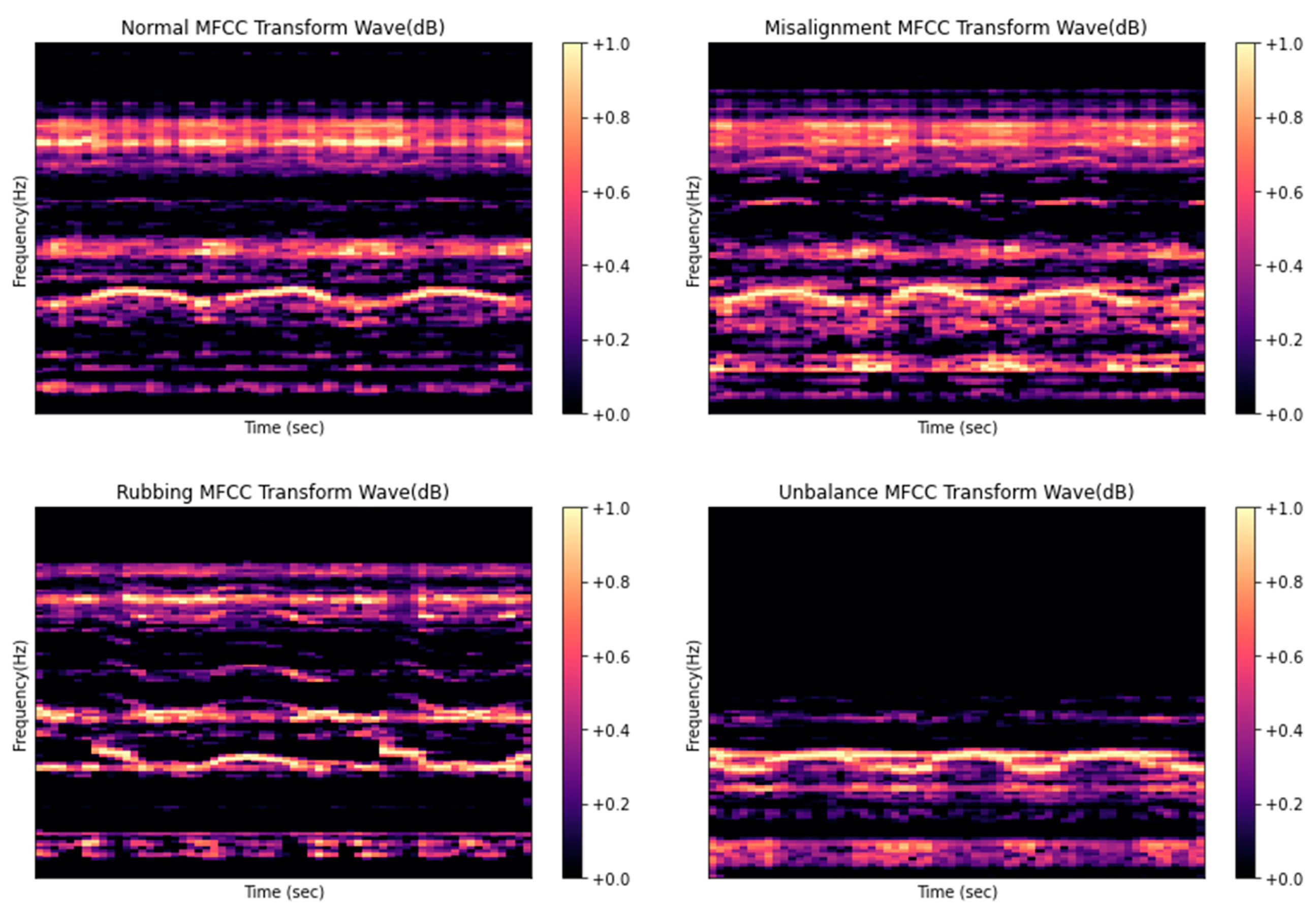
2.2.2. MFCCs (Mel Frequency Cepstral Coefficients)
- Frame the signal into short frames.
- For each frame, calculate the periodogram estimate of the power spectrum.
- Apply the mel filterbank to the power spectra, and sum the energy in each filter.
- Take the logarithm of all filterbank energies.
- Take the Discrete Cosine Transform (DCT) of the log filterbank energies.
- Keep DCT coefficients 2–13, and discard the rest.
2.3. Deep Learning Network
2.4. Fault Score
2.5. Deep Learning Environment
3. Experiment Result
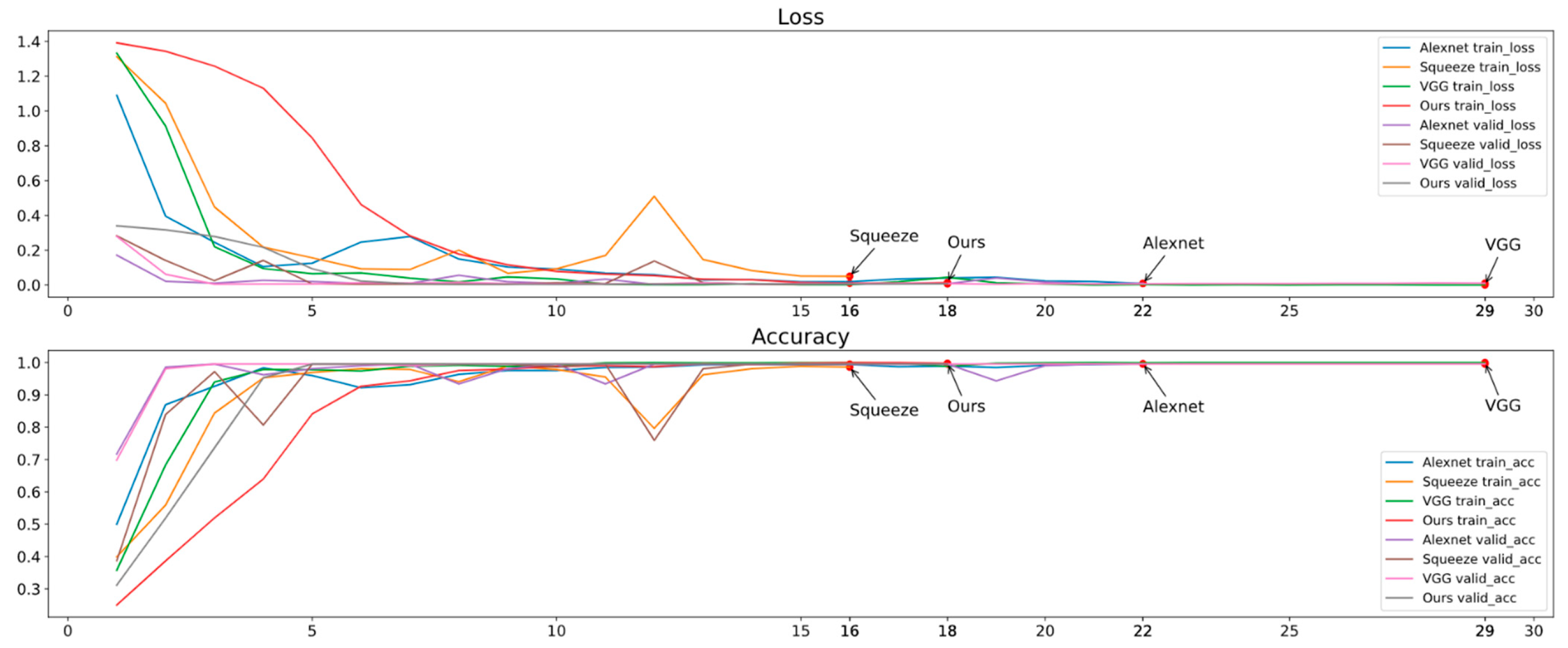
3.1. Performance Evaluation
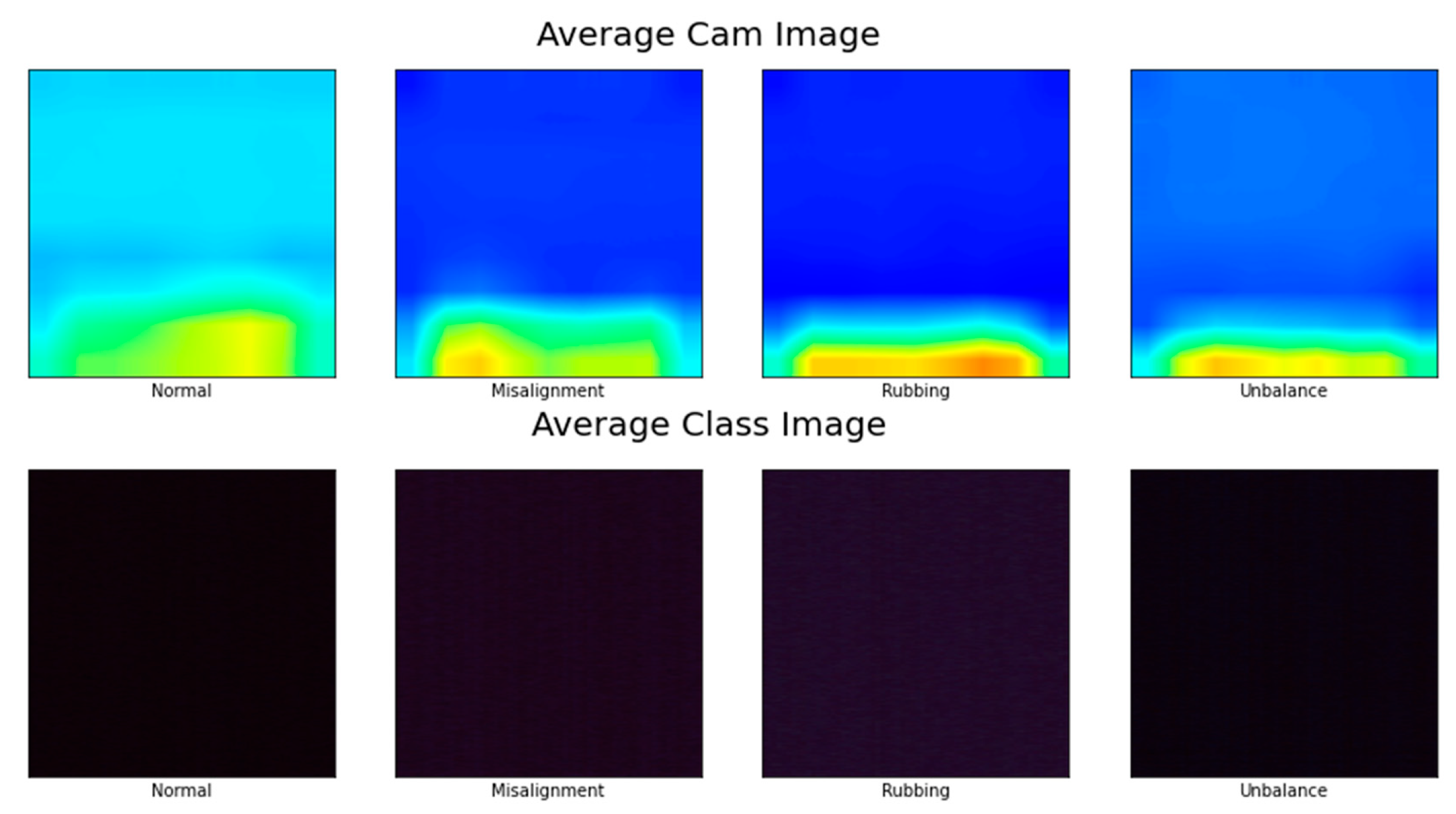
3.2. Visualization of Failure Causes
3.3. Fault Score Variation
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gurovsky, N.N.; Gazenko, O.G.; Adamovich, B.A.; Ilyin, E.A.; Genin, A.M.; Korolkov, V.I.; Shipov, A.A.; Kotovskaya, A.R.; Kondratyeva, V.A.; Serova, L.V.; et al. Study of physiological effects of weightlessness and artificial gravity in the flight of the biosatellite Cosmos-936. Acta Astronaut. 1980, 7, 113–121. [Google Scholar] [CrossRef]
- Jang, T.Y.; Kim, K.-S.; Kim, Y.H. Altered Gravity and Immune Response. Korean J. Aerosp. Environ. Med. 2018, 28, 6–8. [Google Scholar]
- Lee, W.-K.; Cheong, D.-Y.; Park, D.-H.; Choi, B.-K. Performance Improvement of Feature-Based Fault Classification for Rotor System. Int. J. Precis. Eng. Manuf. 2020, 21, 1065–1074. [Google Scholar] [CrossRef]
- Aydmj, T.; Duin, R.P.W. Pump Failure Determination Using Support Vector Data Description; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1999; pp. 415–425. [Google Scholar]
- Zhang, Z.-Y.; Wang, K.-S. Wind turbine fault detection based on SCADA data analysis using ANN. Adv. Manuf. 2014, 2, 70–78. [Google Scholar] [CrossRef] [Green Version]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Iandola, F.N.; Han, S.; Moskewicz, M.W.; Ashraf, K.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5 MB model size. arXiv 2016, arXiv:1602.07360. [Google Scholar]
- Riaz, S.; Elahi, H.; Javaid, K.; Shahzad, T. Vibration feature extraction and analysis for fault diagnosis of rotating machinery-a literature survey. Asia Pac. J. Multidiscip. Res. 2017, 5, 103–110. [Google Scholar]
- Mellit, A.; Tina, G.M.; Kalogirou, S.A. Fault detection and diagnosis methods for photovoltaic systems: A review. Renew. Sustain. Energy Rev. 2018, 91, 1–17. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Song, L.; Wang, H.; Chen, P. Vibration-based intelligent fault diagnosis for roller bearings in low-speed rotating machinery. IEEE Trans. Instrum. Meas. 2018, 67, 1887–1899. [Google Scholar] [CrossRef]
- Khlaief, A.; Nguyen, K.; Medjaher, K.; Picot, A.; Maussion, P.; Tobon, D.; Chauchat, B.; Cheron, R. Feature engineering for ball bearing combined-fault detection and diagnostic. In Proceedings of the 2019 IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Toulouse, France, 27–30 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 384–390. [Google Scholar]
- Le, V.; Yao, X.; Miller, C.; Tsao, B.-H. Series dc arc fault detection based on ensemble machine learning. IEEE Trans. Power Electron. 2020, 35, 7826–7839. [Google Scholar] [CrossRef]
- Yang, C.; Liu, J.; Zeng, Y.; Xie, G. Real-time condition monitoring and fault detection of components based on machine-learning reconstruction model. Renew. Energy 2019, 133, 433–441. [Google Scholar] [CrossRef]
- Abdelgayed, T.S.; Morsi, W.G.; Sidhu, T.S. Fault detection and classification based on co-training of semisupervised machine learning. IEEE Trans. Ind. Electron. 2017, 65, 1595–1605. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; He, S.; Wang, Z. A practical chiller fault diagnosis method based on discrete Bayesian network. Int. J. Refrig. 2019, 102, 159–167. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, H.; Guo, Y.; Wang, J.; Li, G.; Shen, L. Sensor fault detection and diagnosis for a water source heat pump air-conditioning system based on PCA and preprocessed by combined clustering. Appl. Therm. Eng. 2019, 160, 114098. [Google Scholar] [CrossRef]
- Yoo, Y.-J. Fault Detection Method Using Multi-mode Principal Component Analysis Based on Gaussian Mixture Model for Sewage Source Heat Pump System. Int. J. Control Autom. Syst. 2019, 17, 2125–2134. [Google Scholar] [CrossRef]
- Kim, I.-S. On-line fault detection algorithm of a photovoltaic system using wavelet transform. Sol. Energy 2016, 126, 137–145. [Google Scholar] [CrossRef]
- Yi, Z.; Etemadi, A.H. Line-to-line fault detection for photovoltaic arrays based on multiresolution signal decomposition and two-stage support vector machine. IEEE Trans. Ind. Electron. 2017, 64, 8546–8556. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-time motor fault detection by 1-D convolutional neural networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Eren, L. Bearing fault detection by one-dimensional convolutional neural networks. Math. Probl. Eng. 2017, 2017. [Google Scholar] [CrossRef] [Green Version]
- Meng, Z.; Zhan, X.; Li, J.; Pan, Z. An enhancement denoising autoencoder for rolling bearing fault diagnosis. Measurement 2018, 130, 448–454. [Google Scholar] [CrossRef] [Green Version]
- Shao, H.; Jiang, H.; Zhao, H.; Wang, F. A novel deep autoencoder feature learning method for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2017, 95, 187–204. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Wang, F.; Zhao, H. An enhancement deep feature fusion method for rotating machinery fault diagnosis. Knowl. Based Syst. 2017, 119, 200–220. [Google Scholar] [CrossRef]
- Li, C.; Sánchez, R.-V.; Zurita, G.; Cerrada, M.; Cabrera, D. Fault diagnosis for rotating machinery using vibration measurement deep statistical feature learning. Sensors 2016, 16, 895. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sohaib, M.; Kim, J.-M. Reliable fault diagnosis of rotary machine bearings using a stacked sparse autoencoder-based deep neural network. Shock Vib. 2018, 2018, 2919637. [Google Scholar] [CrossRef] [Green Version]
- He, X.; Wang, D.; Li, Y.; Zhou, C. A novel bearing fault diagnosis method based on gaussian restricted boltzmann machine. Math. Probl. Eng. 2016, 2016, 2957083. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, H.; Duan, W.; Liang, T.; Wu, S. Rolling bearing fault feature learning using improved convolutional deep belief network with compressed sensing. Mech. Syst. Signal Process. 2018, 100, 743–765. [Google Scholar] [CrossRef]
- Jiao, J.; Zhao, M.; Lin, J.; Ding, C. Deep coupled dense convolutional network with complementary data for intelligent fault diagnosis. IEEE Trans. Ind. Electron. 2019, 66, 9858–9867. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Hasan, M.J.; Islam, M.M.; Kim, J.-M. Acoustic spectral imaging and transfer learning for reliable bearing fault diagnosis under variable speed conditions. Measurement 2019, 138, 620–631. [Google Scholar] [CrossRef]
- Verstraete, D.; Ferrada, A.; Droguett, E.L.; Meruane, V.; Modarres, M. Deep learning enabled fault diagnosis using time-frequency image analysis of rolling element bearings. Shock Vib. 2017, 2017, 5067651. [Google Scholar] [CrossRef]
- Salamon, J.; Bello, J.P. Deep convolutional neural networks and data augmentation for environmental sound classification. IEEE Signal Process. Lett. 2017, 24, 279–283. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A new convolutional neural network-based data-driven fault diagnosis method. IEEE Trans. Ind. Electron. 2017, 65, 5990–5998. [Google Scholar] [CrossRef]
- Davis, S.; Mermelstein, P. Comparison of parametric representations for monosyllabic word recognition in continuously spoken sentences. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 357–366. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Acero, A.; Hon, H.-W.; Reddy, R. Spoken Language Processing: A Guide to Theory, Algorithm, and System Development; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001; ISBN 0-13-022616-5. [Google Scholar]
- Zhou, B.; Khosla, A.; Lapedriza, A.; Oliva, A.; Torralba, A. Learning deep features for discriminative localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2921–2929. [Google Scholar]
- Xu, M.; Marangoni, R.D. Vibration analysis of a motor-flexible coupling-rotor system subject to misalignment and unbalance, part I: Theoretical model and analysis. J. Sound Vib. 1994, 176, 663–679. [Google Scholar] [CrossRef]
- Muszynska, A.; Goldman, P. Chaotic responses of unbalanced rotor/bearing/stator systems with looseness or rubs. Chaos Solitons Fractals 1995, 5, 1683–1704. [Google Scholar] [CrossRef]
- Wang, S.; Huang, W.; Zhu, Z.K. Transient modeling and parameter identification based on wavelet and correlation filtering for rotating machine fault diagnosis. Mech. Syst. Signal Process. 2011, 25, 1299–1320. [Google Scholar] [CrossRef]
- McClellan, J.H.; Schafer, R.W.; Yoder, M.A. Signal Processing First; Pearson Education: Upper Saddle River, NJ, USA, 2003; ISBN 0-13-120265-0. [Google Scholar]
- Müller, M. Fundamentals of Music Processing: Audio, Analysis, Algorithms, Applications; Springer: Berlin/Heidelberg, Germany, 2015; ISBN 3-319-21945-6. [Google Scholar]
- Loshchilov, I.; Hutter, F. Sgdr: Stochastic gradient descent with warm restarts. arXiv 2016, arXiv:1608.03983. [Google Scholar]
- Prechelt, L. Early stopping-but when? In Neural Networks: Tricks of the Trade; Springer: Berlin/Heidelberg, Germany, 1998; pp. 55–69. [Google Scholar]
- McFee, B.; Raffel, C.; Liang, D.; Ellis, D.P.; McVicar, M.; Battenberg, E.; Nieto, O. Librosa: Audio and music signal analysis in python. In Proceedings of the 14th Python in Science Conference, Austin, TX, USA, 6–12 July 2015; Volume 8, pp. 18–25. [Google Scholar]
- Buitinck, L.; Louppe, G.; Blondel, M.; Pedregosa, F.; Mueller, A.; Grisel, O.; Niculae, V.; Prettenhofer, P.; Gramfort, A.; Grobler, J. API design for machine learning software: Experiences from the scikit-learn project. arXiv 2013, arXiv:1309.0238. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Properties |
|---|---|
| Pulse 3560C (B&K) | 4/2-ch Input/output Module Operating Freq. range: 0~25.6 kHz Direct/Constant Current Line Drive (CCLD)/Microphone (MIC). preamp 1 Tacho Conditioning |
| Accelerometer (B&K 4371) | Operating Freq. range: 1~25.6 kHz Operating Temp. −50 C~121 C Sensitivity: 9.84 pC/g |
| Hyper Parameter | Value |
|---|---|
| Learning Rate | 0.001 |
| Batch Size | 4 |
| Warm-up Train phase | 10 |
| Weight Decay | 0.0001 |
| Optimizer | SGD (Stochastic Gradient Descent) |
| Epoch | 200 |
| Early Stopping patience | 10 |
| Class | Model | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|---|
| Normal | STFT based + our model | 0.98 | 1.0 | 0.98 | 0.99 |
| MFCC based + our model | 0.98 | 1.0 | 0.98 | 0.99 | |
| Rubbing | STFT based + our model | 1.0 | 1.0 | 1.0 | 1.0 |
| MFCC based + our model | 1.0 | 1.0 | 1.0 | 1.0 | |
| Unbalance | STFT based + our model | 1.0 | 0.98 | 1.0 | 0.99 |
| MFCC based + our model | 1.0 | 0.98 | 1.0 | 0.99 | |
| Misalignment | STFT based + our model | 1.0 | 1.0 | 1.0 | 1.0 |
| MFCC based + our model | 1.0 | 1.0 | 1.0 | 1.0 |
| Method | Algorithm | Parameters | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|---|---|
| Machine Learning | MLP [5] | 74,500 | 0.95 | 0.9525 | 0.955 | 0.9525 |
| GA-SVM [3] | - | 0.51 | 0.507 | 0.505 | 0.5025 | |
| PCA-SVM [3] | - | 0.96 | 0.9625 | 0.9675 | 0.965 | |
| Deep Learning | Squeeze Net [8] | 737,476 | 0.995 | 0.982 | 0.985 | 0.985 |
| Alex Net [7] | 57,020,228 | 0.995 | 0.995 | 0.995 | 0.995 | |
| VGG19 [6] | 139,597,636 | 0.995 | 0.995 | 0.995 | 0.995 | |
| Our | 20,037,444 | 0.995 | 0.995 | 0.995 | 0.995 |
| Transfer Learning | Epoch | Train Accuracy | Train Loss | Valid Accuracy | Valid Loss | |
|---|---|---|---|---|---|---|
| Ours | Yes | 23 | 0.991 | 0.033 | 0.995 | 0.007 |
| No | 22 | 0.988 | 0.050 | 0.995 | 0.009 | |
| Squeeze Net [8] | Yes | 22 | 0.990 | 0.066 | 0.995 | 0.004 |
| No | 114 | 0.760 | 0.364 | 0.707 | 0.107 | |
| AlexNet [7] | Yes | 22 | 0.986 | 0.053 | 0.995 | 0.007 |
| No | 12 | 0.271 | 1.385 | 0.203 | 0.348 | |
| VGG19 [6] | Yes | 16 | 0.982 | 0.062 | 0.995 | 0.008 |
| No | 17 | 0.985 | 0.043 | 0.995 | 0.004 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Yu, H.; Yang, H.; Song, I.; Choi, J.; Yang, J.; Lim, G.; Kim, K.-S.; Choi, B.; Kwon, J. A Study on Deep Learning Application of Vibration Data and Visualization of Defects for Predictive Maintenance of Gravity Acceleration Equipment. Appl. Sci. 2021, 11, 1564. https://doi.org/10.3390/app11041564
Lee S, Yu H, Yang H, Song I, Choi J, Yang J, Lim G, Kim K-S, Choi B, Kwon J. A Study on Deep Learning Application of Vibration Data and Visualization of Defects for Predictive Maintenance of Gravity Acceleration Equipment. Applied Sciences. 2021; 11(4):1564. https://doi.org/10.3390/app11041564
Chicago/Turabian StyleLee, SeonWoo, HyeonTak Yu, HoJun Yang, InSeo Song, JungMu Choi, JaeHeung Yang, GangMin Lim, Kyu-Sung Kim, ByeongKeun Choi, and JangWoo Kwon. 2021. "A Study on Deep Learning Application of Vibration Data and Visualization of Defects for Predictive Maintenance of Gravity Acceleration Equipment" Applied Sciences 11, no. 4: 1564. https://doi.org/10.3390/app11041564