
Estimating Critical Latency Affecting Ship’s Collision in Re-Mote Maneuvering of Autonomous Ships


Abstract
:Featured Application
Abstract
1. Introduction
2. Definition of Concepts and Terms Regarding Critical Latency
2.1. COLREGs
- COLREGs Rule 14: Head-on situation
- (a)
- When two power-driven vessels are meeting on reciprocal or nearly reciprocal courses so as to involve risk of collision each shall alter her course to starboard so that each shall pass on the port side of the other.
- (b)
- Such a situation shall be deemed to exist when a vessel sees the other ahead or nearly ahead and by night she could see the masthead lights of the other in a line or nearly in a line and/or both sidelights and by day she observes the corresponding aspect of the other vessel.
- (c)
- When a vessel is in any doubt as to whether such a situation exists, she shall assume that it does exist and act accordingly.
- COLREGs Rule 15: Crossing situation
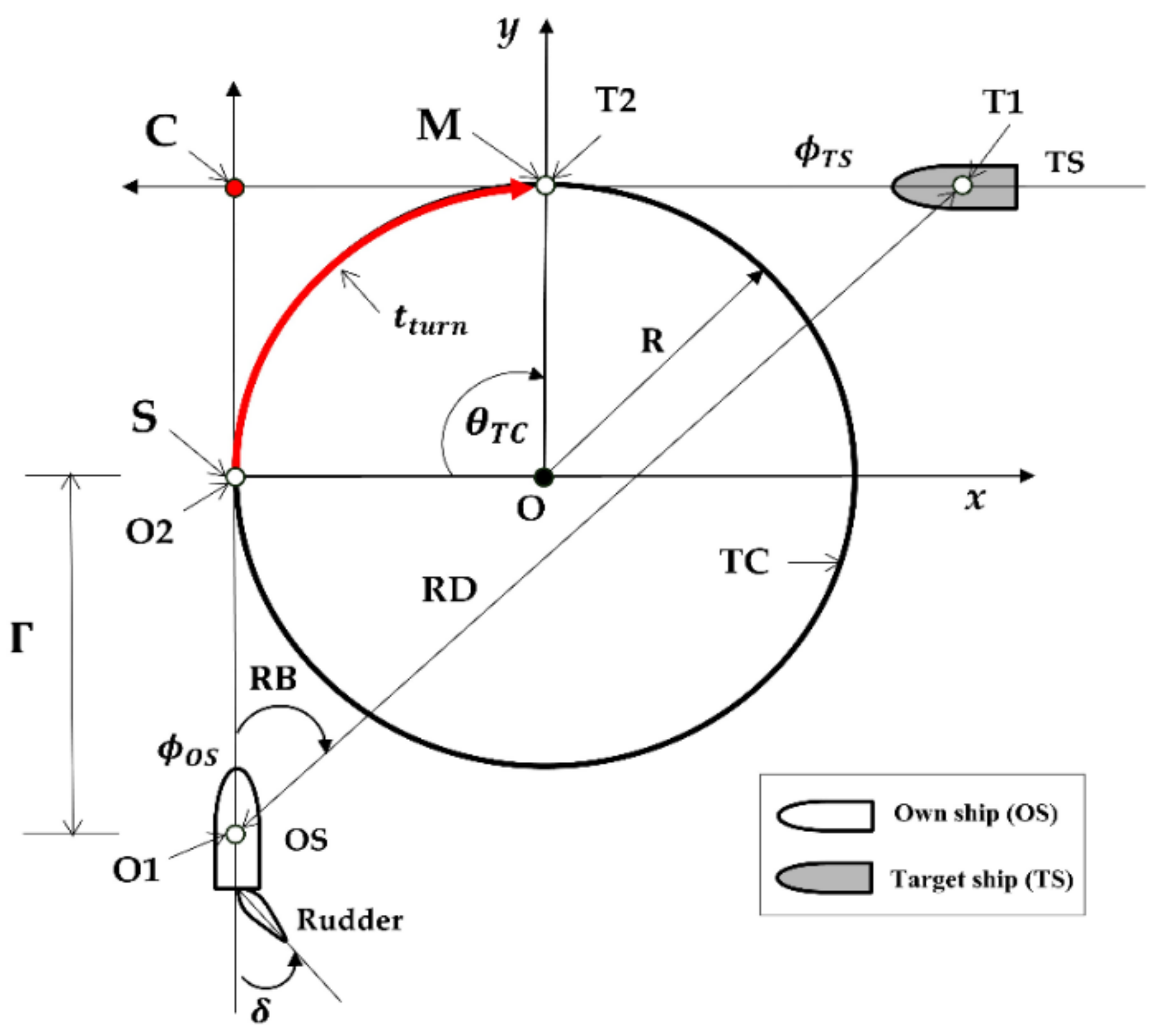
2.2. Coordinates and Terms
- and , OS’s heading (90°) and other ship’s heading (180°);
- O1 and O2, OS’s arbitrary location (x, y) that appears over time;
- T1 and T2, TS’s arbitrary location (x, y) that appears over time;
- RD, OS-TS relative distance (m);
- RB, OS-TS relative bearing (radian);
- δ, OS’s rudder angle (°);
- C, point where the two ships may collide under their encountering situation;
- S, point where the OS starts turning;
- M, point where OS, which has turned at Point S, may collide with TS;
- TC, turning circle with a radius R (m) from the coordinate center O;
- , turning time (second or minute) of S-M;
- , central angle (radian) of at O;
- Γ, critical latency (second or minute).
2.3. Concepts for Critical Latency Estimation
3. Methodology
3.1. Method of Estimating Critical Latency
3.1.1. Formulation of Estimation
3.1.2. Error Evaluation of Estimated Critical Latency
3.1.3. Evaluation of Estimated Performance
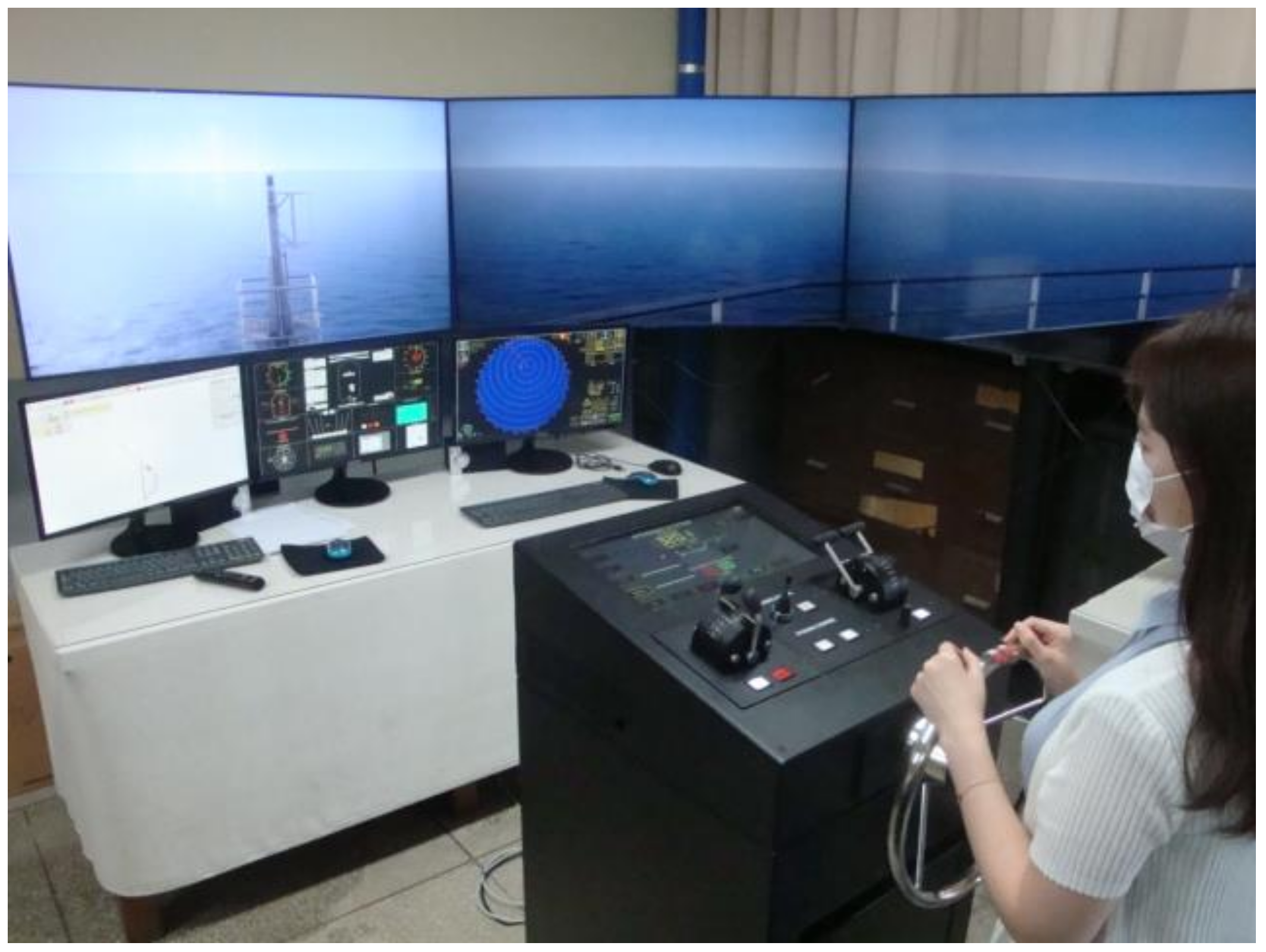
3.2. Ship-Handling Simulation for Turning Circle Observing
3.3. Data Processing
4. Results
4.1. Data Anlysis Results
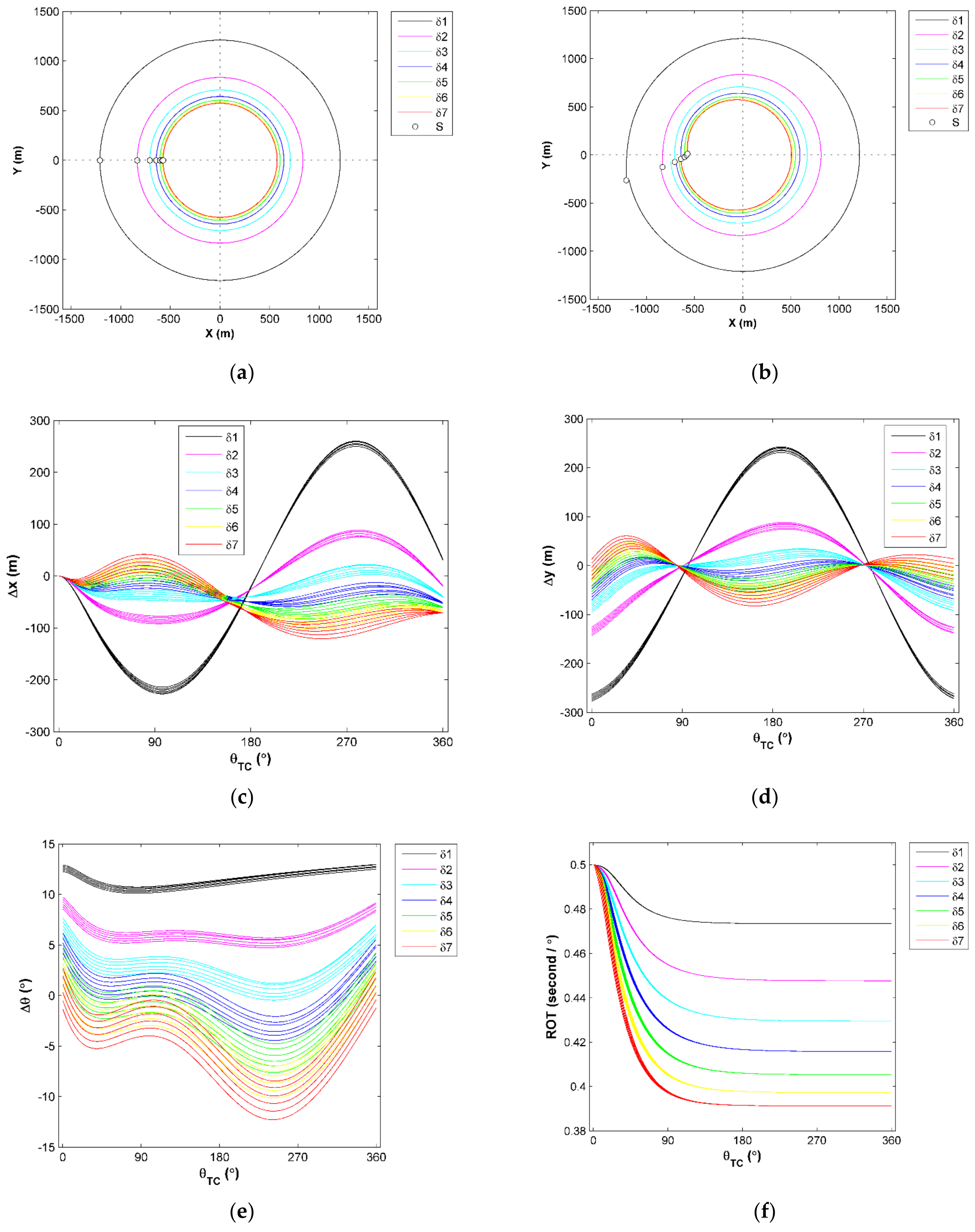
4.1.1. Analysis of OS trajectory
4.1.2. Results of Acquisition of Turning Circle Radius
4.1.3. Acquisition of Turning Time Ratio
4.2. Critical Latency Estimation and Error Analysis Results
4.2.1. Critical Latency Estimation Results
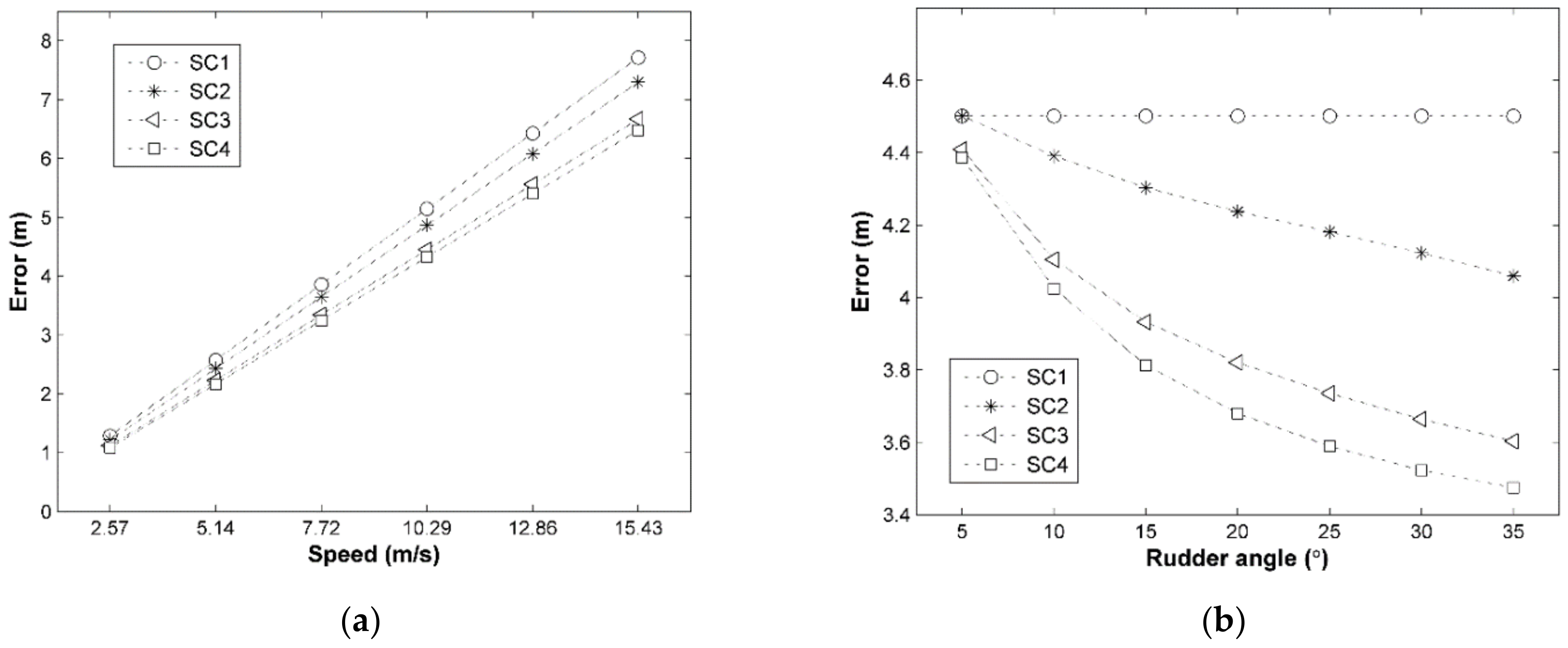
4.2.2. Error Analysis of Critical Latency Estimates
4.3. Estimated Performance Evaluation of Critical Latency
4.3.1. Evaluation of Estimated Performance
4.3.2. Summary of Performance Evaluation Results
- The time at both points decreases as the encounter bearing decreases;
- The time difference between the two points also decreases as the encounter bearing decreases;
- The smaller the time for two potential collision points and the smaller the time difference between the two points, the closer the collision is.
5. Discussion
- Consideration of vessel scale (length, width) in estimating critical latency;
- Consideration of turning circles that can be observed on actual vessels;
- Application of critical latency for collision avoidance in remote maneuvering.
6. Conclusions
- In the case of the cargo vessel (171.8 m long, 23.17 m wide) applied to the experiment, the collision occurred with a critical latency having an average range of 0.2–8.53 min depending on the rudder angle and with a critical latency having an average range of 0.2–12.74 min depending on the vessel speed.
- Evaluation of the estimated performance of critical latency demonstrated that the collisions caused by the designed route and critical latency can be identified in terms of location and time.
Author Contributions
Funding
Conflicts of Interest
References
- IMO. IMO Takes First Steps to Address Autonomous Ship. Available online: https://www.imo.org/en/MediaCentre/PressBriefings/Pages/08-MSC-99-MASS-scoping.aspx (accessed on 31 May 2018).
- IMO. MSC.1/Circ.1638 of 3June 2021 “Outcome of the Regulatory Scoping Exercise for the use of Maritime Autonomous Surface; Ships (MASS): London, UK, 2021. [Google Scholar]
- DNV-GL. Autonomous and Remotely Operated Ships; DNV-GL: Oslo, Norway, 2018; pp. 1–111. [Google Scholar]
- ClassNK. Guidelines for Automated/Autonomous Operation on Ships (Ver. 1.0); ClassNK: Tokyo, Japan, 2020; pp. 1–40. [Google Scholar]
- VTMIS. EU Operational Guidelines for Safe, Secure and Sustainable Trials of Maritime Autonomous Surface Ships (MASS); European Union: Maastricht, The Netherlands, 2020; pp. 1–23. [Google Scholar]
- Rolls-Royce plc. Remote and Autonomous Ships the Next Steps; AAWA Position Paper; Rolls-Royce plc: London, UK, 2016; pp. 1–87. [Google Scholar]
- Wariishi, K. Maritime Autonomous Surface Ships: Development Trends and Prospects–How Digitalization Drives Changes in Maritime Industry; Mitsui & Co. Global Strategic Studies Institute Monthly Report; Mitsui & Co. Global Strategic Studies Institute: Tokyo, Japan, 2019; pp. 1–8. [Google Scholar]
- Chen, Y.Y.; Ellis-Tiew, M.; Chen, W.; Wang, C. Fuzzy risk evaluation and collision avoidance control of unmanned surface vessels. Appl. Sci. 2021, 11, 6338. [Google Scholar] [CrossRef]
- Benjamin, M.R.; Leonard, J.J.; Curcio, J.A.; Newman, P.M. A method for protocol-based collision avoidance between autonomous marine surface craft. J. Field Robot. 2006, 23, 333–346. [Google Scholar] [CrossRef] [Green Version]
- IMO. Convention on the International Regulations for Preventing Collisions at Sea; International Maritime Organization: London, UK, 1972. [Google Scholar]
- Inoue, K. Theory and Practice of Ship Handling; Kobe University: Kobe, Japan, 2013; pp. 25–29. [Google Scholar]
- Chauvin, C.; Lardjane, S.; Morel, G.; Clostermann, J.P.; Langard, B. Human and organisational factors in maritime accidents: Analysis of collisions at sea using the HFACS. Accid. Anal. Prev. 2013, 59, 26–37. [Google Scholar] [CrossRef] [PubMed]
- Cordon, J.R.; Mestre, J.M.; Walliser, J. Human factors in seafaring: The role of situation awareness. Saf. Sci. 2017, 93, 256–265. [Google Scholar] [CrossRef]
- Embrey, D. Understanding Human Behaviour and Error; Human Reliability Associates: Wigan, UK, 2005; pp. 1–10. [Google Scholar]
- Yim, J.B.; Kim, D.S.; Park, D.J. Modeling perceived collision risk in vessel encounter situations. Ocean Eng. 2018, 166, 64–75. [Google Scholar] [CrossRef]
- Szlapczynski, R. A unified measure of collision risk derived from the concept of a ship domain. J. Navig. 2006, 59, 477–490. [Google Scholar] [CrossRef]
- Lee, H.J.; Furukawa, Y.; Park, D.J. Seafarers’ awareness-based domain modelling in restricted areas. J. Navig. 2021, 1–17. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. A target information display for visualizing collision avoidance manoeuvres in various visibility conditions. J. Navig. 2015, 68, 1041–1055. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. An analysis of domain-based ship collision risk parameters. Ocean Eng. 2016, 126, 47–56. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. Review of ship safety domains: Models and applications. Ocean Eng. 2017, 145, 277–289. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Krata, P.; Szlapczynska, J. Ship domain applied to determining distances for collision avoidance manoeuvres in give-way situations. Ocean Eng. 2018, 165, 43–54. [Google Scholar] [CrossRef]
- Fauville, G.; Queiroz, A.C.M.; Woolsey, E.S.; Kelly, J.W.; Bailenson, J.N. The effect of water immersion on vection in virtual reality. Sci. Rep. 2021, 11, 1022. [Google Scholar] [CrossRef] [PubMed]
- Krata, P.; Montewka, J. Assessment of a critical area for a give-way ship in a collision encounter. Arch. Transp. 2015, 34, 51–60. [Google Scholar] [CrossRef] [Green Version]
- Krata, P.; Montewka, J.; Hinz, T. Towards the assessment of critical area in a collision encounter accounting for stability conditions of a ship. Pr. Nauk. Politechn. Warsz. 2016, 114, 169–178. [Google Scholar]
- Tanwar, S.; Tyagi, S.; Budhiraja, I.; Kumar, N. Tactile Internet for autonomous vehicles: Latency and reliability analysis. IEEE Wirel. Commun. 2019, 26, 66–72. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, X.; Chen, X.; Sang, L.; Zhang, D. A novel approach for assistance with anti-collision decision making based on the International Regulations for Preventing Collisions at Sea. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2012, 226, 250–259. [Google Scholar] [CrossRef]
- Szlapczynski, R. A new method of planning collision avoidance manoeuvres for multi-target encounter situations. J. Navig. 2018, 61, 307. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. A ship domain-based model of collision risk for near-miss detection and Collision Alert Systems. Reliab. Eng. Syst. 2021, 214, 107766. [Google Scholar] [CrossRef]
- Zhang, M.; Montewka, J.; Manderbacka, T.; Kujala, P.; Hirdaris, S. A big data analytics method for the evaluation of ship-ship collision risk reflecting hydrometeorological conditions. Reliab. Eng. Syst. 2021, 213, 107674. [Google Scholar] [CrossRef]
- Wang, N. A novel analytical framework for dynamic quaternion ship domains. J. Navig. 2013, 66, 265–281. [Google Scholar] [CrossRef] [Green Version]
- Chislett, M.S.; Strom-Tejsen, J. Planar motion mechanism tests and full-scale steering and manoeuvring predictions for a Mariner class vessel. Int. Shipbuild. Prog. 1965, 12, 201–224. [Google Scholar] [CrossRef]
- Åström, K.J.; Källström, C.G. Identification of ship steering dynamics. Automatica 1976, 12, 9–22. [Google Scholar] [CrossRef] [Green Version]
- Van Berlekom, W.B.; Goddard, T.A. Maneuvering of large tankers. Soc. Nav. Archit. Mar. Eng. 1972, 1, 25. [Google Scholar]
- K-SIM Navigation. Available online: https://www.kongsberg.com/digital/products/maritime-simulation/k-sim-navigation/ (accessed on 16 June 2021).
- Bowditch, N. Chapter 12-The sailings. In American Practical Navigator: An Epitome of Navigation; Clifford, G.J., Jr., Ed.; National Geospatial-Intelligence Agency: Springfield, VI, USA, 2019; pp. 193–213. [Google Scholar]
- Davis, P.V.; Dove, M.J.; Stockel, C.T. A computer simulation of marine traffic using domains and arenas. J. Navig. 1980, 33, 215–222. [Google Scholar] [CrossRef]
- Fujii, Y.; Tanaka, K. Traffic capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Goodwin, E.M. A statistical study of ship domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef] [Green Version]
- Coldwell, T.G. Marine traffic behaviour in restricted waters. J. Navig. 1983, 36, 430–444. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rudder Angle 1 | R | |||
|---|---|---|---|---|
| 2423.57 | 2420.23 | 0.9986 | 1210.95 | |
| 1665.31 | 1672.44 | 1.0043 | 834.44 | |
| 1416.06 | 1415.77 | 0.9998 | 707.96 | |
| 1286.98 | 1283.36 | 0.9972 | 642.59 | |
| 1212.04 | 1207.09 | 0.9959 | 604.78 | |
| 1169.41 | 1164.40 | 0.9957 | 583.45 | |
| 1150.81 | 1146.48 | 0.9962 | 574.32 |
| Rudder Angle 1 | Speed 2 | |||||
|---|---|---|---|---|---|---|
| 51.58 | 25.78 | 17.19 | 12.89 | 10.32 | 8.60 | |
| 37.28 | 18.64 | 12.43 | 9.32 | 7.46 | 6.22 | |
| 32.65 | 16.33 | 10.88 | 8.16 | 6.53 | 5.44 | |
| 30.43 | 15.21 | 10.14 | 7.60 | 6.08 | 5.07 | |
| 29.28 | 14.63 | 9.76 | 7.32 | 5.85 | 4.88 | |
| 28.79 | 14.38 | 9.58 | 7.18 | 5.75 | 4.79 | |
| 28.79 | 14.38 | 9.58 | 7.18 | 5.74 | 4.78 | |
| Rudder Angle 1 | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 |
|---|---|---|---|---|
| Mean (SD 2) | Mean (SD) | Mean (SD) | Mean (SD) | |
| 0.36 (0.26) | 3.28 (2.51) | 5.88 (4.50) | 8.53 (6.53) | |
| 0.25 (0.18) | 2.16 (1.64) | 3.99 (3.05) | 5.90 (4.51) | |
| 0.22 (0.14) | 1.76 (1.33) | 3.33 (2.54) | 5.01 (3.82) | |
| 0.21 (0.13) | 1.56 (1.17) | 3.00 (2.28) | 4.56 (3.47) | |
| 0.20 (0.12) | 1.43 (1.06) | 2.80 (2.12) | 4.30 (3.27) | |
| 0.20 (0.11) | 1.35 (1.00) | 2.69 (2.03) | 4.17 (3.16) | |
| 0.20 (0.11) | 1.30 (0.96) | 2.64 (1.98) | 4.12 (3.12) |
| Speed 1 | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 |
|---|---|---|---|---|
| Mean (SD 2) | Mean (SD) | Mean (SD) | Mean (SD) | |
| 0.52 (0.16) | 4.44 (1.74) | 8.46 (2.86) | 12.74 (3.90) | |
| 0.28 (0.08) | 2.24 (0.86) | 4.25 (1.42) | 6.39 (1.94) | |
| 0.20 (0.05) | 1.50 (0.57) | 2.85 (0.95) | 4.27 (1.29) | |
| 0.16 (0.03) | 1.14 (0.43) | 2.14 (0.71) | 3.22 (0.97) | |
| 0.13 (0.03) | 0.92 (0.34) | 1.72 (0.56) | 2.58 (0.77) | |
| 0.12 (0.02) | 0.77 (0.28) | 1.44 (0.47) | 2.16 (0.64) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yim, J.-B.; Park, D.-J. Estimating Critical Latency Affecting Ship’s Collision in Re-Mote Maneuvering of Autonomous Ships. Appl. Sci. 2021, 11, 10987. https://doi.org/10.3390/app112210987
Yim J-B, Park D-J. Estimating Critical Latency Affecting Ship’s Collision in Re-Mote Maneuvering of Autonomous Ships. Applied Sciences. 2021; 11(22):10987. https://doi.org/10.3390/app112210987
Chicago/Turabian StyleYim, Jeong-Bin, and Deuk-Jin Park. 2021. "Estimating Critical Latency Affecting Ship’s Collision in Re-Mote Maneuvering of Autonomous Ships" Applied Sciences 11, no. 22: 10987. https://doi.org/10.3390/app112210987