
Active Sonar Target Classification Method Based on Fisher’s Dictionary Learning

Abstract
:1. Introduction
2. Related Work
3. Active Sonar Target Classification Method Based on Fisher’s Dictionary Learning
3.1. Fisher Discriminant Model and Solution Method
3.1.1. Fisher Discriminant Model
3.1.2. FDDL Model-Solving—The Solution of Cross-Iteration
3.2. Active Sonar Target Classification Method Based on Fisher’s Dictionary Learning

4. Method Performance Verification Based on Measured Data
4.1. Overview of the Measured Data
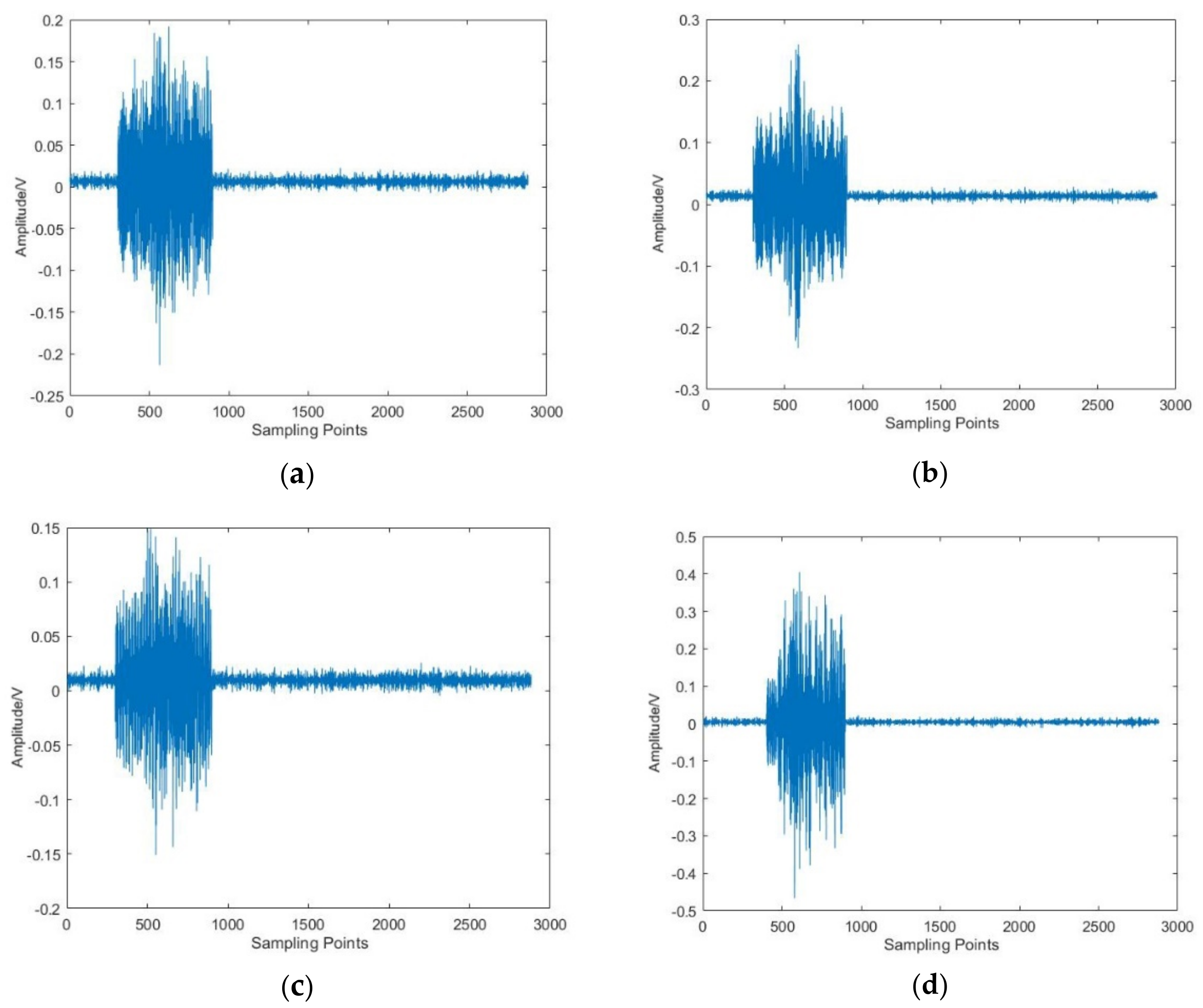
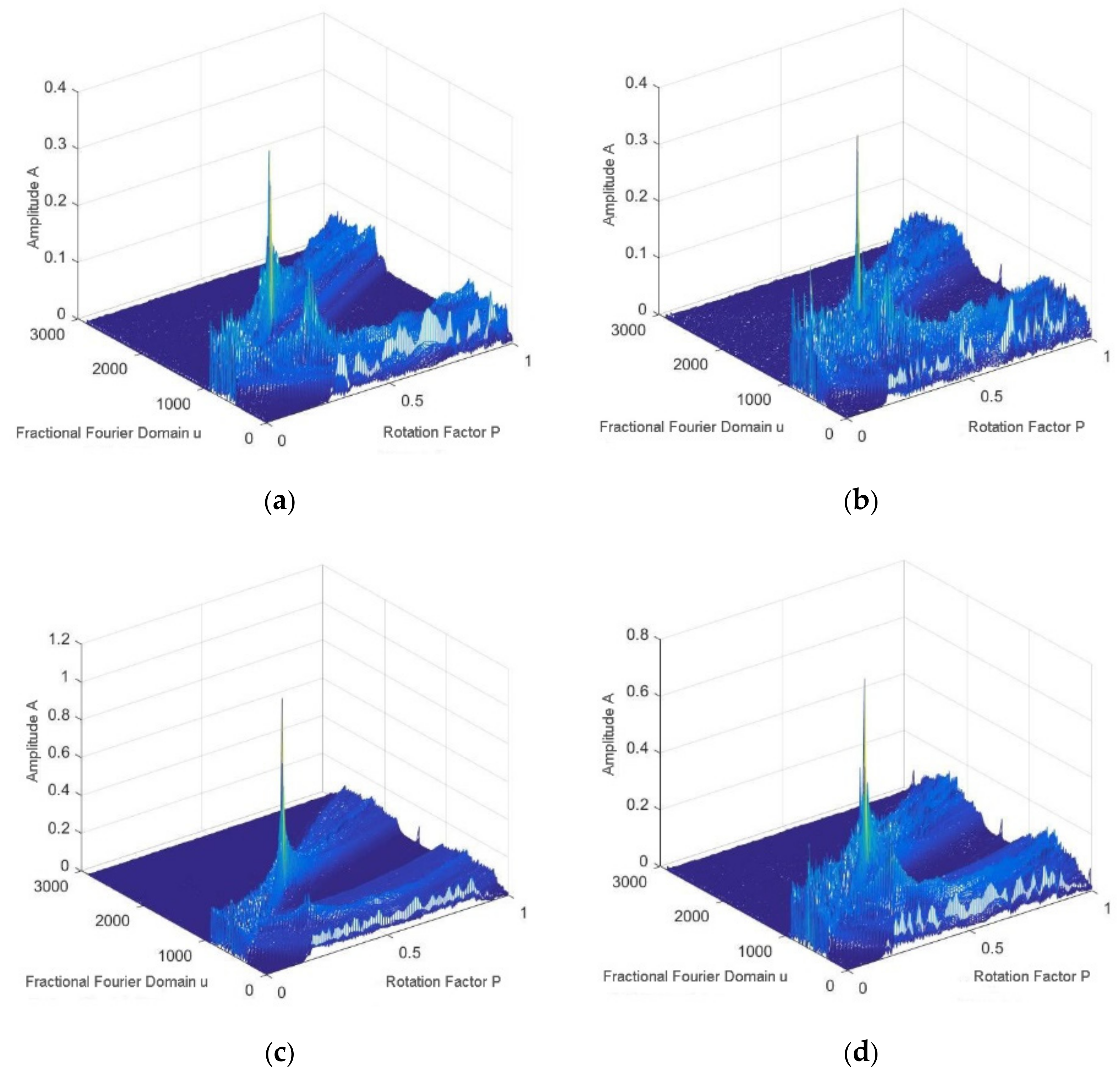
4.2. FRFT Optimal-Order Domain Characteristics of an Active Sonar Signal under a Reverberation Background
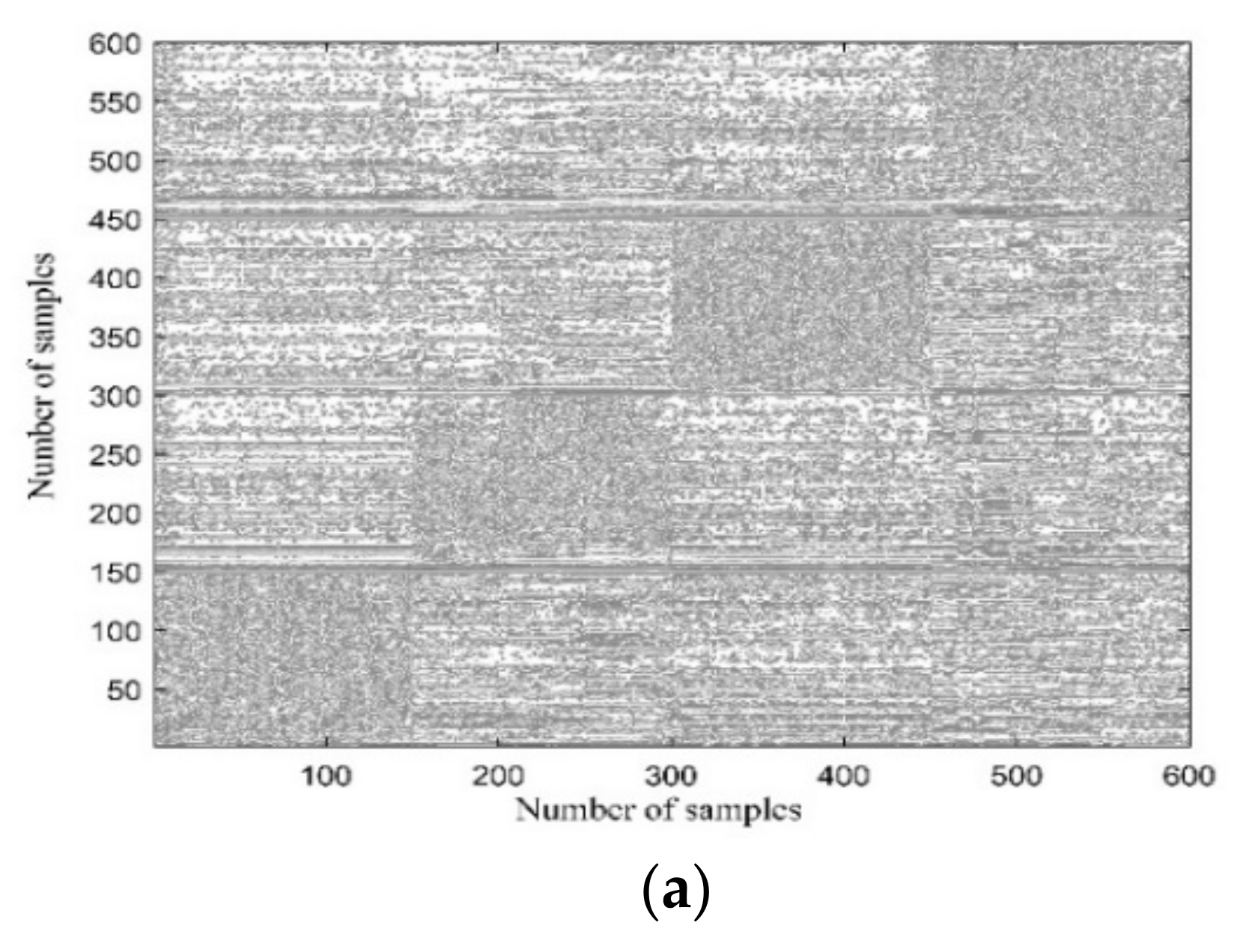
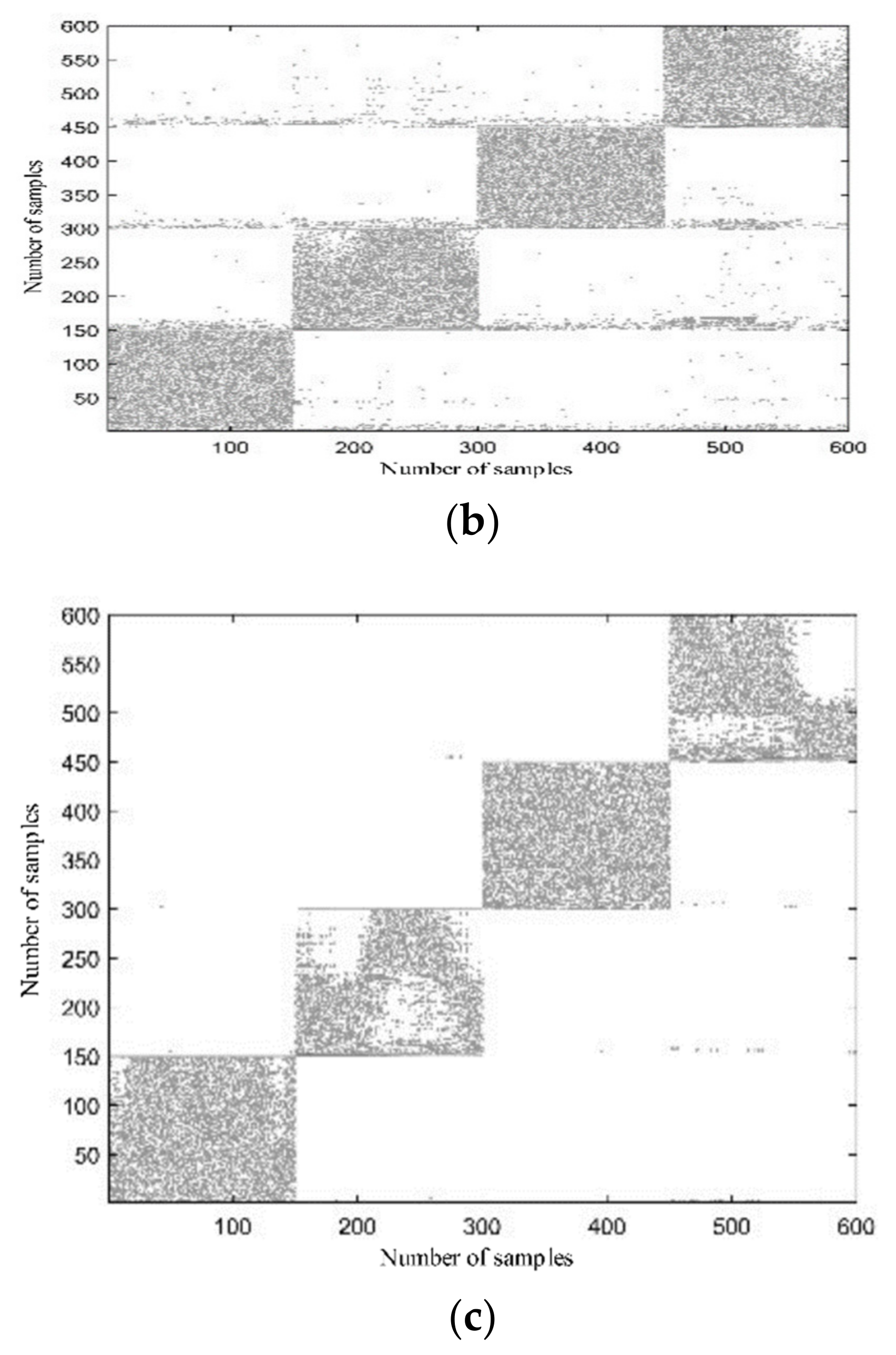
4.3. SRC Based on FDDL
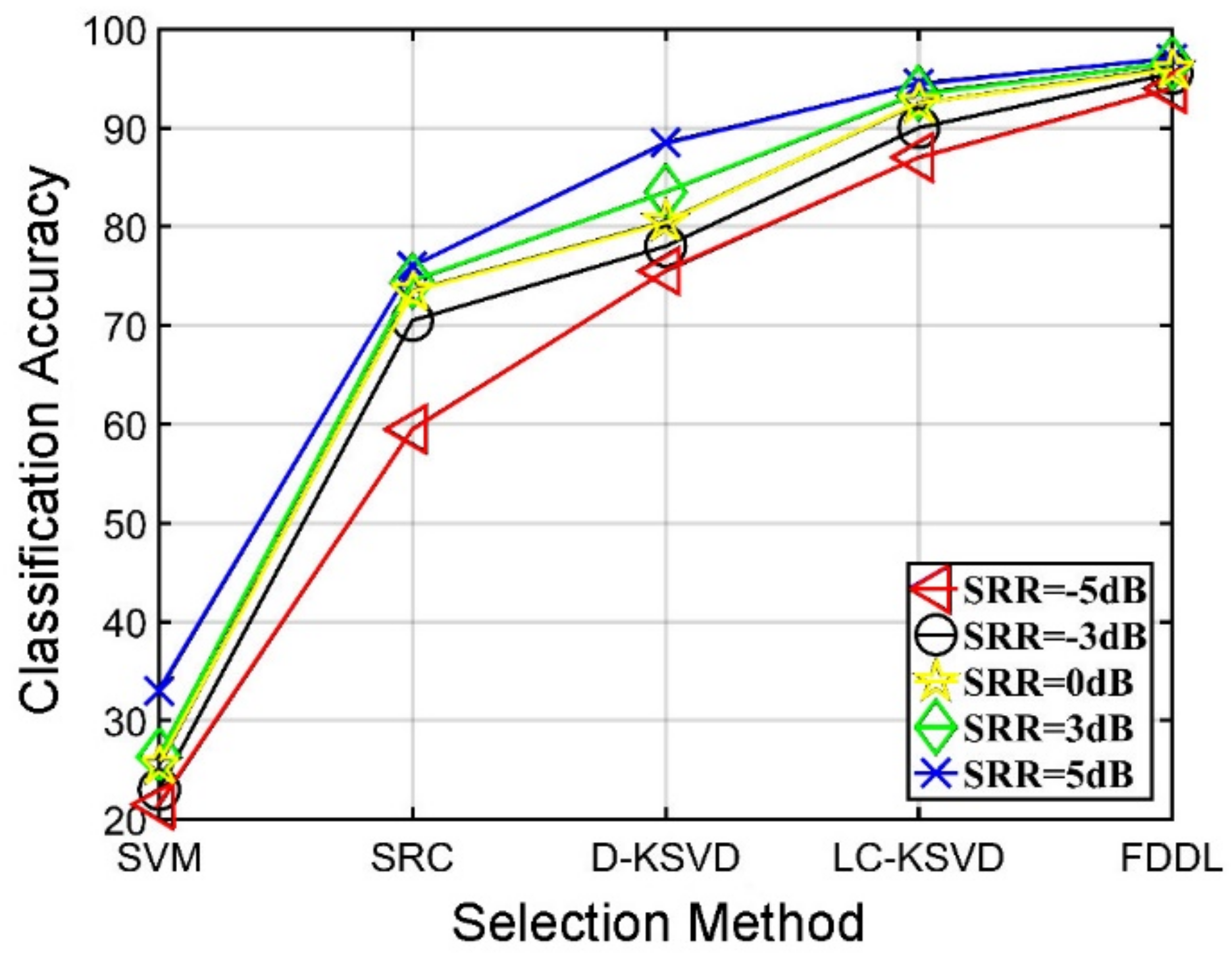
4.4. Comparative Analysis of the Classification Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Young, V.W.; Hines, P.C. Perception-based Automatic Classification of Impulsive-source Active Sonar Echoes. J. Acoust. Soc. Am. 2007, 122, 1502–1517. [Google Scholar] [CrossRef] [PubMed]
- Philips, S.; Pitton, J.; Atlas, L. Perceptual Feature Identification for Active Sonar Echoes. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, M.H.; Sun, H.; Zhu, G.P. Modeling and verification of transceiver composite reverberation intensity in irregular sea area. Tech. Acoust. 2011, 30, 489–492. [Google Scholar]
- Li, Y.Q.; Xu, Y.; Zhou, S.Z. Analysis of ocean reverberation characteristics and modeling and simulation research. Ship Electron. Eng. 2018, 38, 86–88+182. [Google Scholar]
- Ye, M.J.; Hu, C.H.; Wan, L.G.; Lei, G.H. Fast single sample face recognition based on sparse representation classification. Multimed. Tools Appl. 2021, 80, 1–23. [Google Scholar] [CrossRef]
- Song, X.N.; Shao, C.B.; Yang, X.; Wu, X. Sparse representation-based classification using generalized weighted extended dictionary. Soft Comput. 2017, 21, 4335–4348. [Google Scholar] [CrossRef]
- Wright, J.; Yang, A.Y.; Ganesh, A.; Sastry, S.S.; Ma, Y. Robust Face Recognition via Sparse Representation. Trans. Pattern Anal. Mach. Intell. 2009, 31, 210–227. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, M.; Zhang, L.; Yang, J.; Zhang, D. Metaface Learning for Sparse Representation Based Face Recognition. In Proceedings of the 2010 IEEE International Conference on Image Processing, Hong Kong, China, 26–29 September 2010; pp. 1601–1604. [Google Scholar]
- Wang, W.; Zhu, Z.; Lu, J. Sparse Representation for Face Recognition Based on Dictionary Learning and Locality Constraint. Comput. Knowl. Technol. 2018, 14, 200–202. [Google Scholar]
- Zhang, Q.; Li, B. Discriminative K-SVD for dictionary learning in face recognition. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2691–2698. [Google Scholar]
- Jiang, Z.; Lin, Z.; Davis, L.S. Label Consistent K-SVD: Learning a Discriminative Dictionary for Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2651–2664. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Zhang, L.; Feng, X.; Zhang, D. Fisher Discrimination Dictionary Learning for sparse representation. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 543–550. [Google Scholar]
- Wang, Y.; Wang, C.; Liang, L. Sparse representation theory and its application for face recognition. Int. J. Smart Sens. Intell. Syst. 2015, 8, 107–124. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Lu, J. Face Recognition Based on FDDL and Hybrid Sparse. Sci. Technol. Vis. 2017, 26, 87+67. [Google Scholar]
- Wang, R.; Shen, M.; Li, Y.; Gomes, S. Multi-task Joint Sparse Representation Classification Based on Fisher Discrimination Dictionary Learning. Comput. Mater. Contin. 2018, 57, 25–48. [Google Scholar] [CrossRef]
- Yang, M.; Chang, H.; Luo, W. Fisher discrimination dictionary pair learning for image classification. Neurocomputing 2016, 269, 68–73. [Google Scholar] [CrossRef]
- Wang, D.; Shang, E. Hydroacoustics, 1st ed.; Science Press: Beijing, China, 1984; pp. 298–350. [Google Scholar]
- Liu, B.; Lei, J. Principles of Hydroacoustics, 1st ed.; Harbin Engineering University Press: Harbin, China, 2009; pp. 187–210. [Google Scholar]
- Namias, V. The Fractional Order Fourier Transform and its Application to Quantum Mechanics. IMA J. Appl. Math. 1980, 25, 241–265. [Google Scholar] [CrossRef]
- Deng, B.; Tao, R.; Qi, L.; Liu, F. A Study on Anti-reverberation Method Based on Fractional Fourier Transform. Acta Armamentarii 2005, 6, 43–47. [Google Scholar]
- Wang, B.; Tang, J.; Yu, F. Identification of Sonar Detection Signal Based on Fractional Fourier Transform. Pol. Marit. Res. 2018, 25, 125–131. [Google Scholar]
- Mairal, J.; Ponce, J.; Sapiro, G.; Zisserman, A.; Bach, F. Supervised Dictionary Learning. In Proceedings of the Advances in Neural Information Processing Systems, Proceedings of the 2008 Conference, Paris, France, September 2008; pp. 1033–1040. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SRR /dB | SVM /% | SRC /% | D-KSVD /% | LC-KSVD /% | FDDL /% |
|---|---|---|---|---|---|
| −5 | 21.5 | 59.5 | 75.5 | 87 | 94 |
| −3 | 23 | 70.5 | 78 | 90 | 95.5 |
| 0 | 25.5 | 73.5 | 80.5 | 92.5 | 96 |
| 3 | 26 | 74.5 | 83.5 | 93.5 | 96.5 |
| 5 | 33 | 76 | 88.5 | 94.5 | 97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, T.; Jin, J.; Liu, T.; Zhang, J. Active Sonar Target Classification Method Based on Fisher’s Dictionary Learning. Appl. Sci. 2021, 11, 10635. https://doi.org/10.3390/app112210635
Sun T, Jin J, Liu T, Zhang J. Active Sonar Target Classification Method Based on Fisher’s Dictionary Learning. Applied Sciences. 2021; 11(22):10635. https://doi.org/10.3390/app112210635
Chicago/Turabian StyleSun, Tongjing, Jiwei Jin, Tong Liu, and Jun Zhang. 2021. "Active Sonar Target Classification Method Based on Fisher’s Dictionary Learning" Applied Sciences 11, no. 22: 10635. https://doi.org/10.3390/app112210635