
Transient Numerical Model on the Design Optimization of the Adiabatic Section Length for the Pulsating Heat Pipe

Abstract
:1. Introduction
2. A New Transient Numerical Model
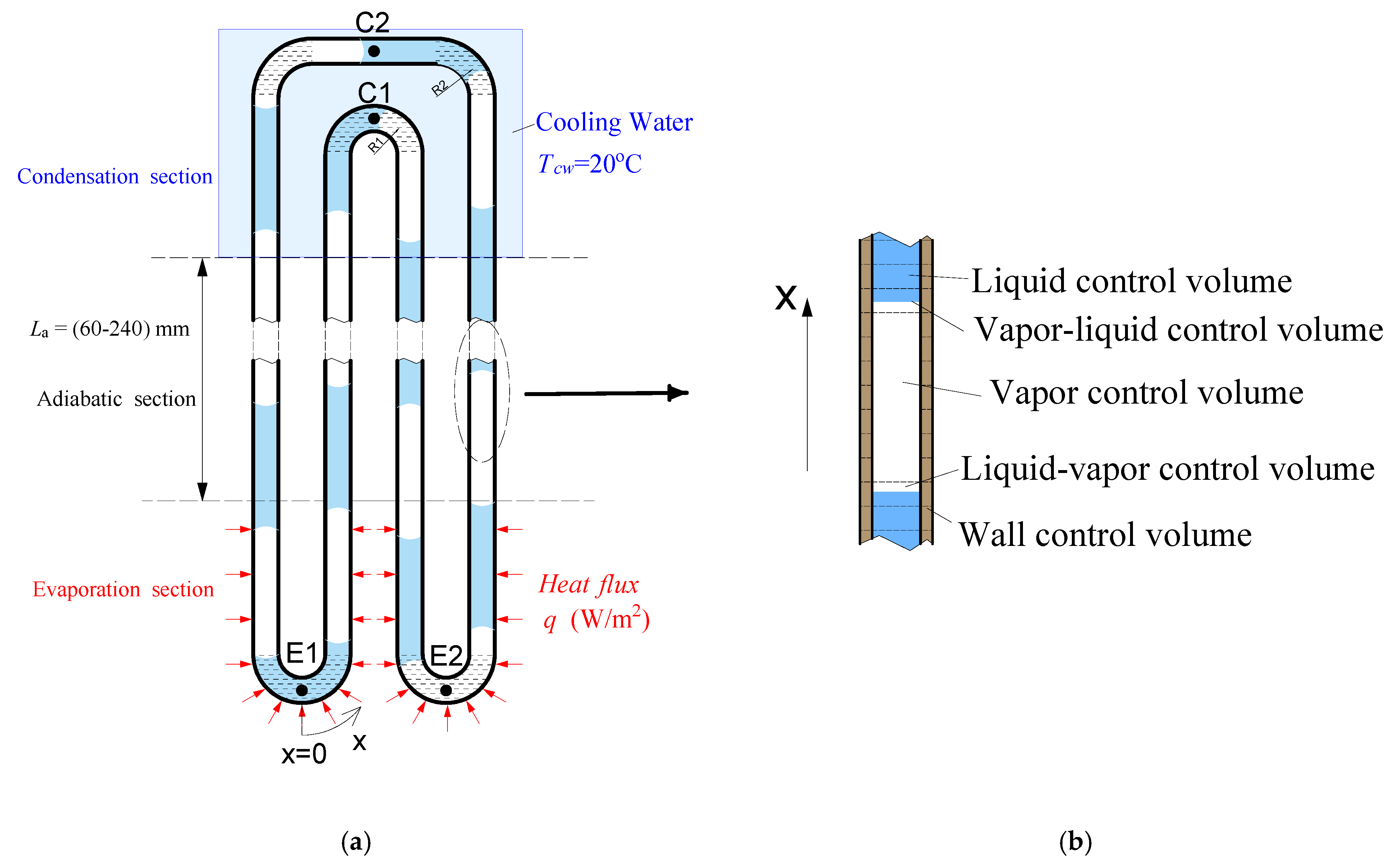
2.1. Model Description and Assumptions
- (1)
- The flow pattern of the working fluid was assumed to be the slug flow.
- (2)
- Liquid was assumed to be incompressible, and vapor was treated as an ideal gas.
- (3)
- The pressure and the temperature were uniform inside a vapor plug.
- (4)
- The friction between vapor plugs and inner wall of the PHP was neglected
- (5)
- The vapor plug was enclosed by the liquid film, and the thickness of the liquid film was assumed to be a constant (100 μm).
2.2. Governing Equations
2.2.1. Pipe Wall
2.2.2. Vapor Control Volume
2.2.3. Liquid Control Volume
2.2.4. Control Volumes in the Interface between Liquid Slug and Vapor Plug
2.3. Momentum Conservation
2.4. Merging and Coalescence
2.4.1. Merging of Liquid Slugs
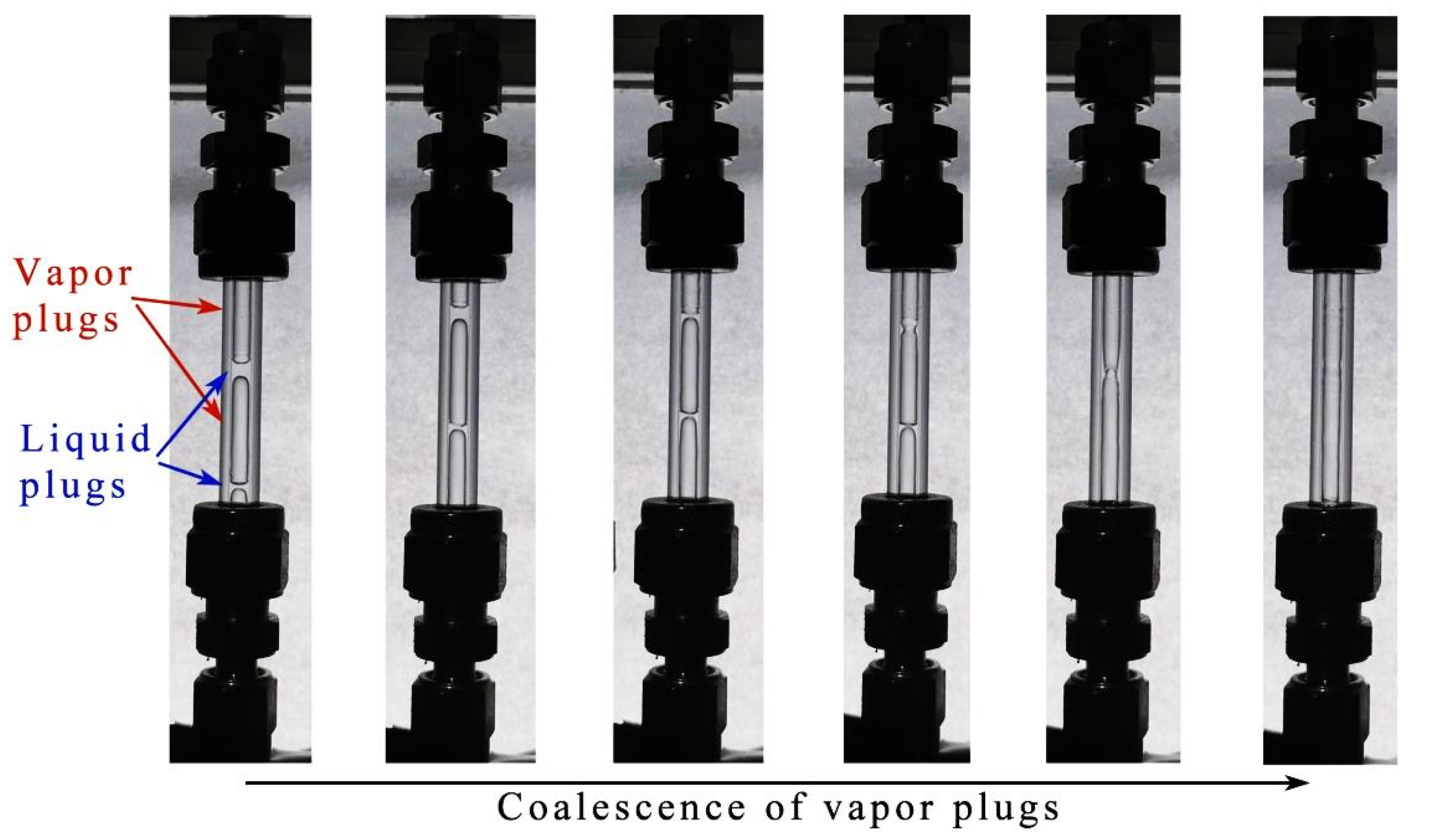
2.4.2. Coalescence of Vapor Plugs
2.5. New Vapor Plug Generation
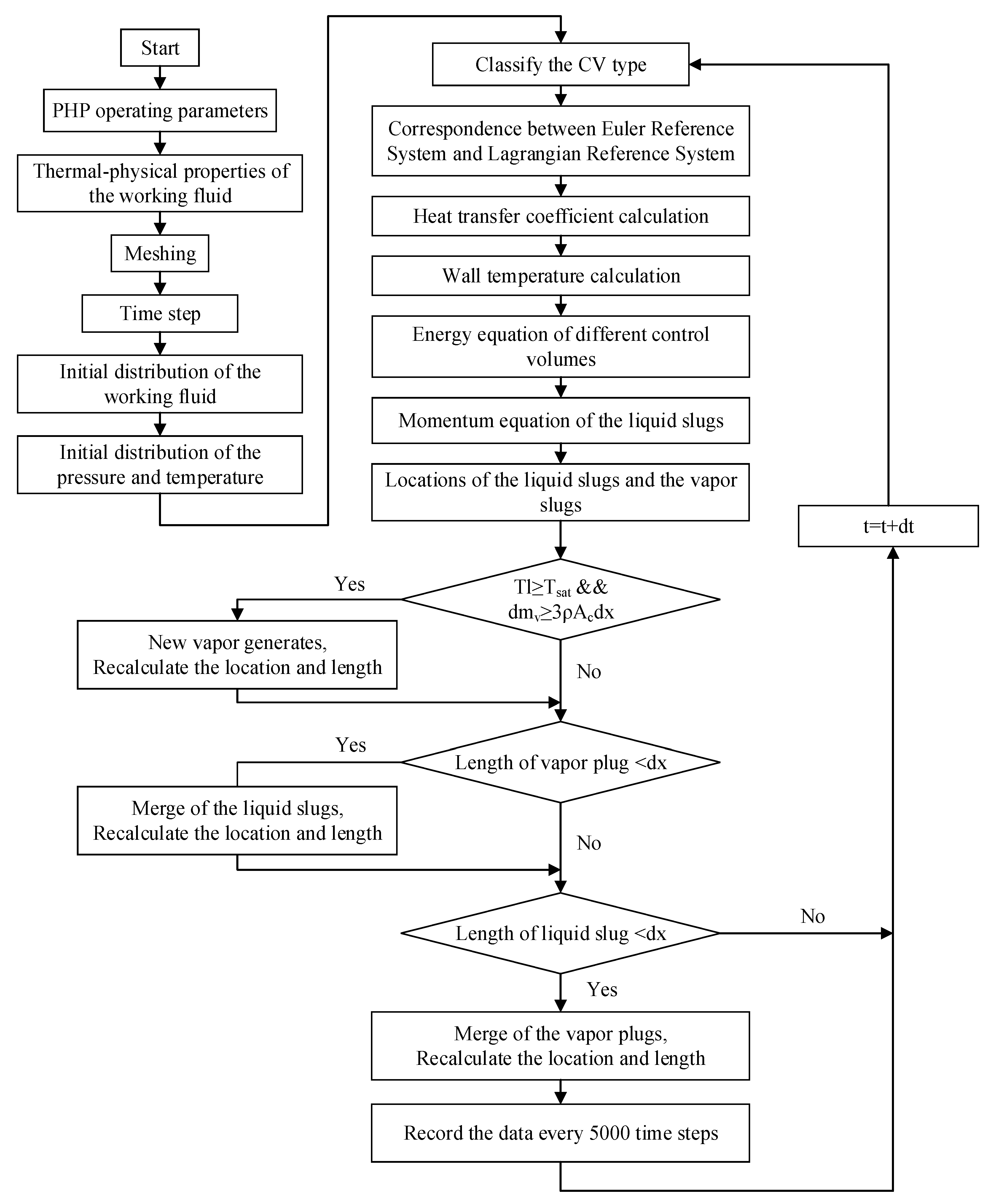
2.6. Numerical Procedure
3. Result and Discussion
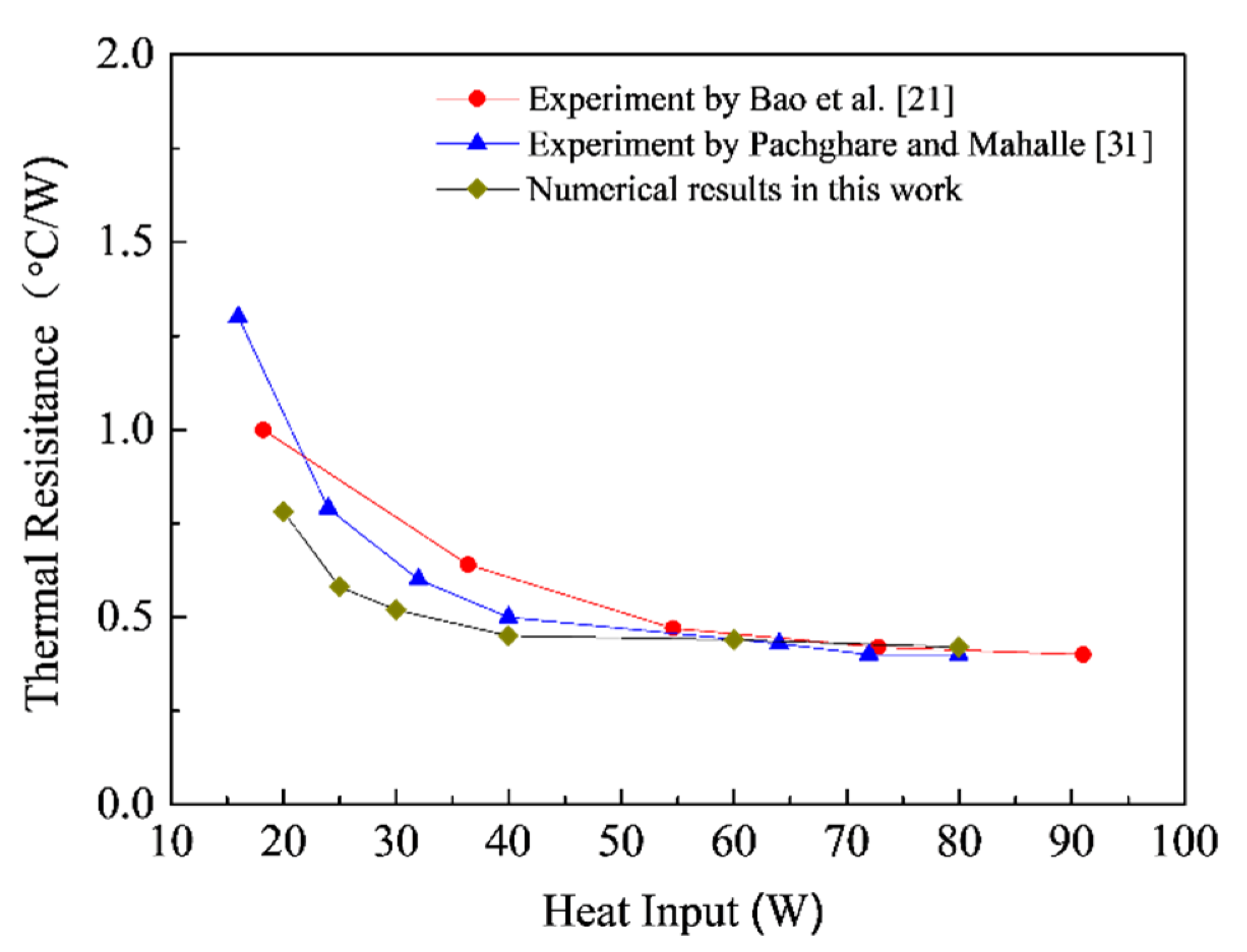
3.1. Comparison of the Numerical Results with the Experimental Results
3.2. The Operation Characteristics of the PHP
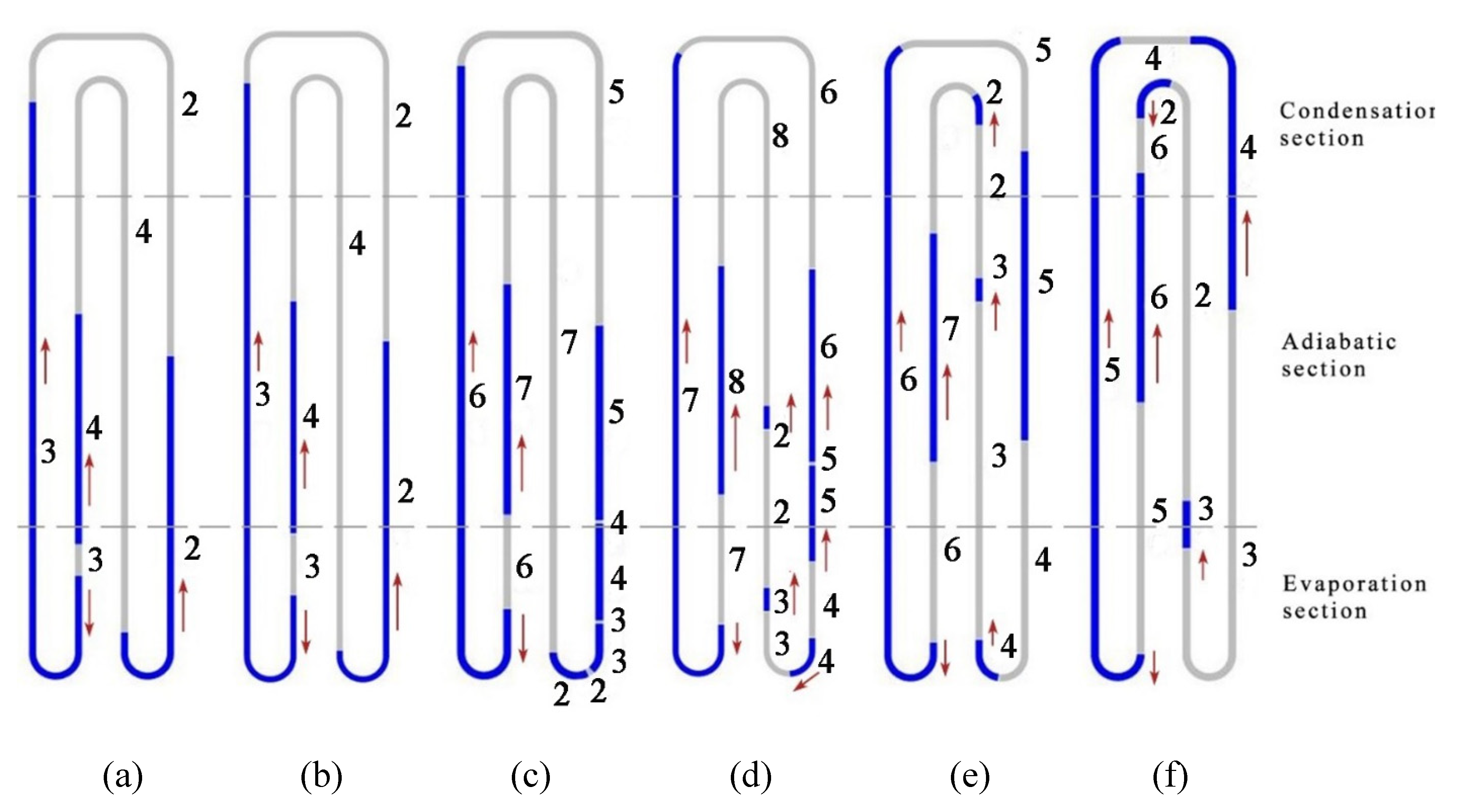
3.2.1. The Flow Characteristics of the Liquid Slugs in the PHP
3.2.2. The Heat Transfer Characteristics of the PHP
3.3. Effect of the Adiabatic Section Length on the Performance of the PHP
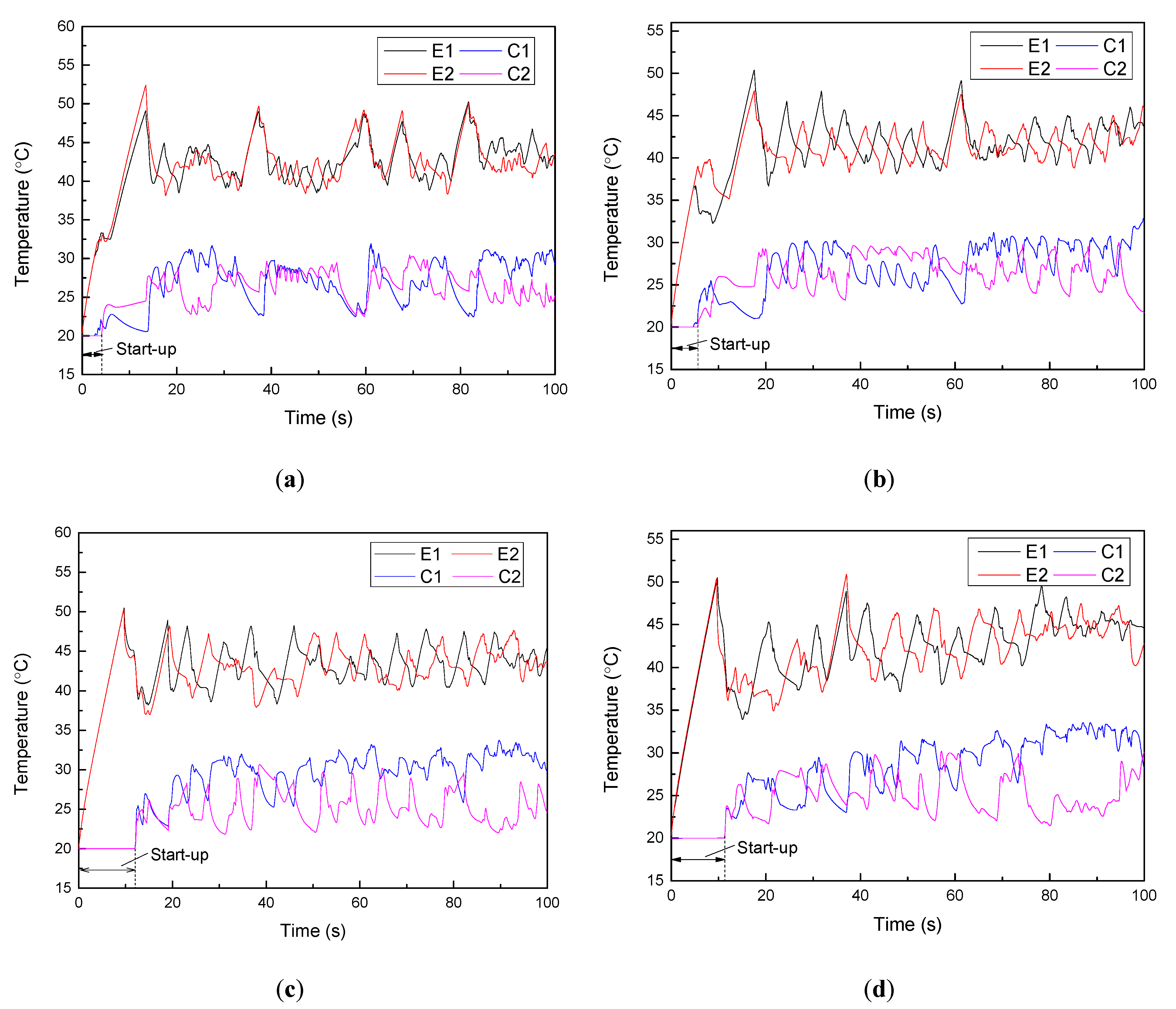
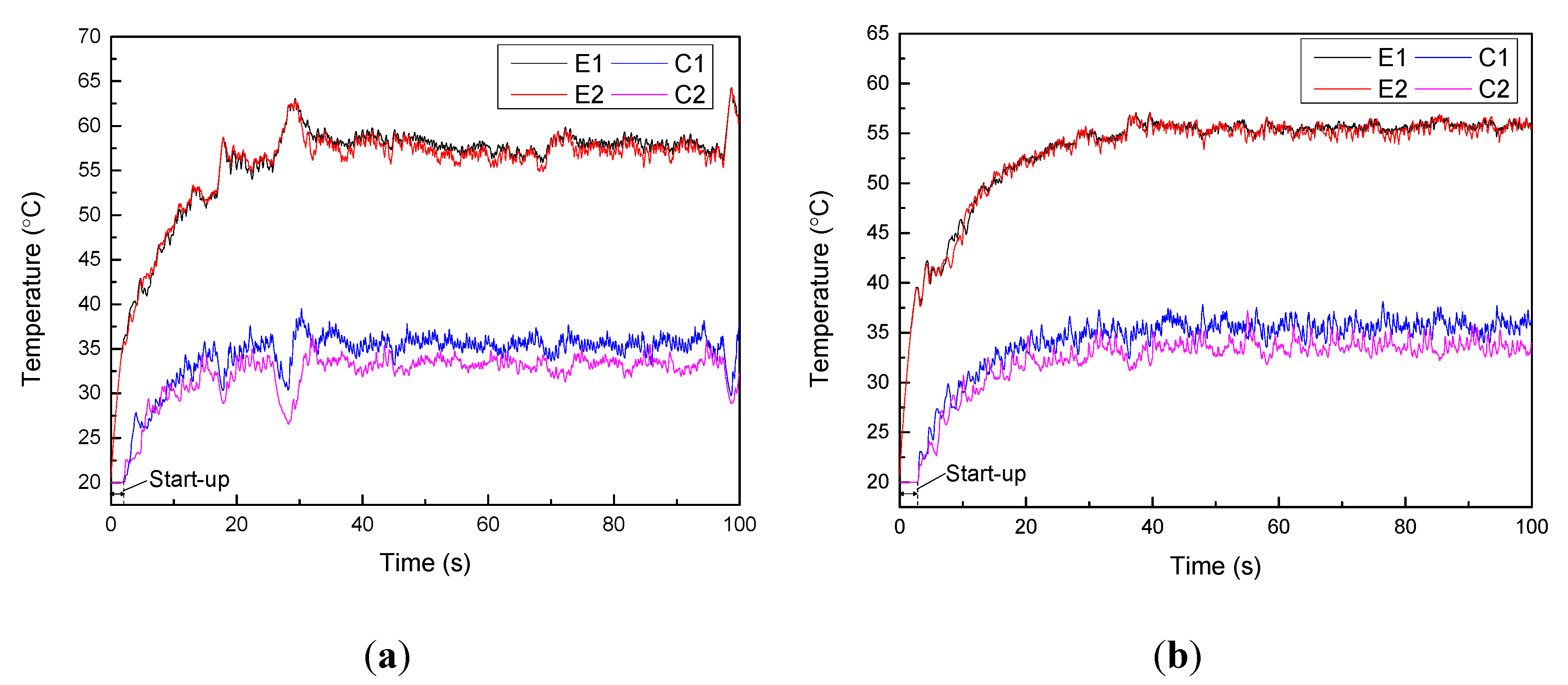
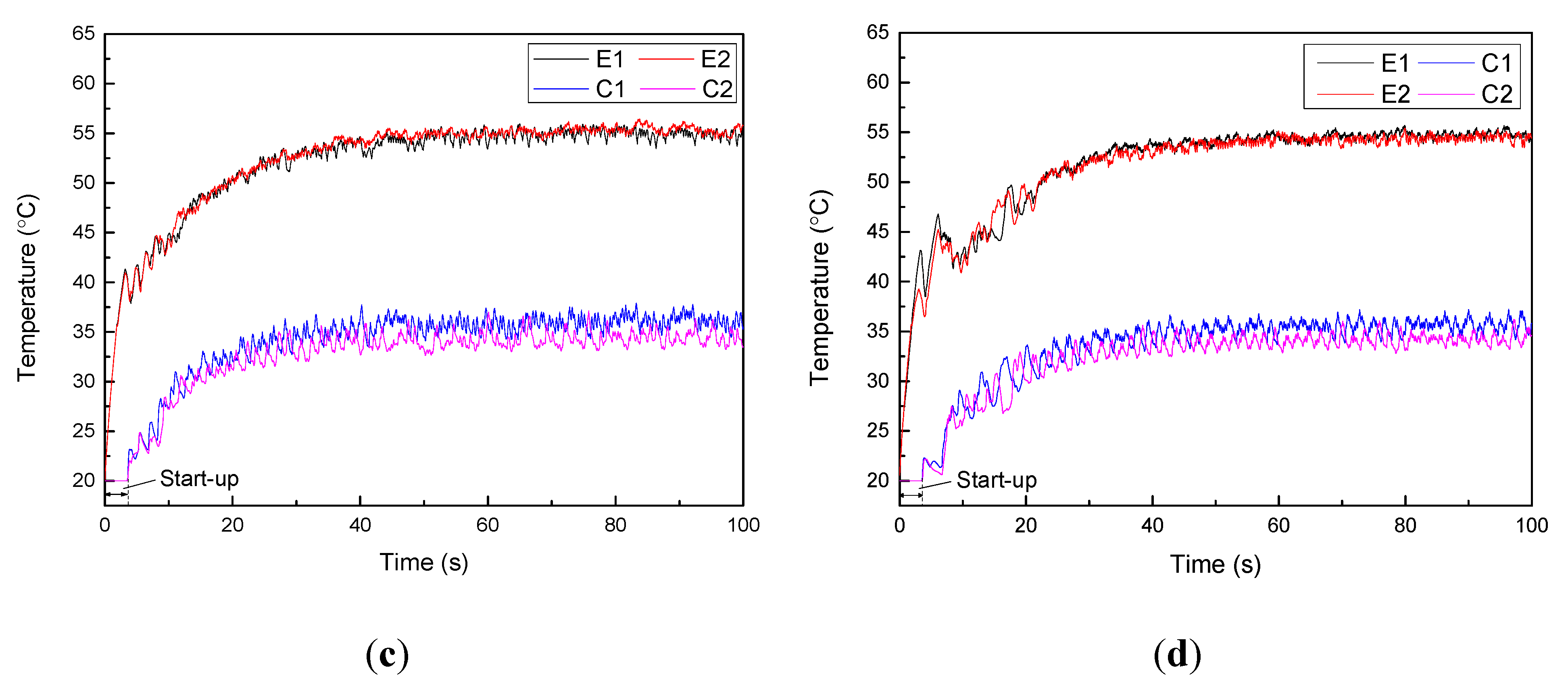
3.3.1. Effect of the Adiabatic Section Length on the Start-up Performance of the PHP
3.3.2. Effect of the Adiabatic Section Length on the Thermal Performance of the PHP
4. Conclusions
- (1)
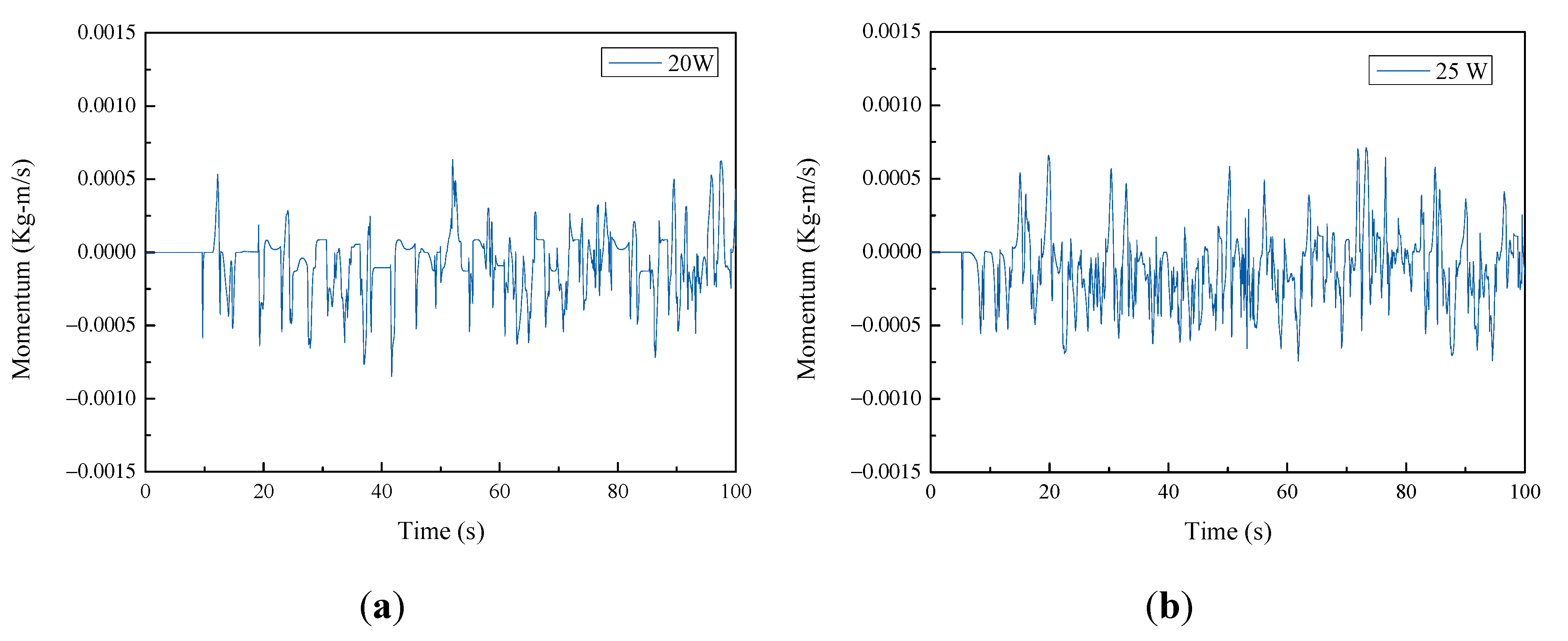
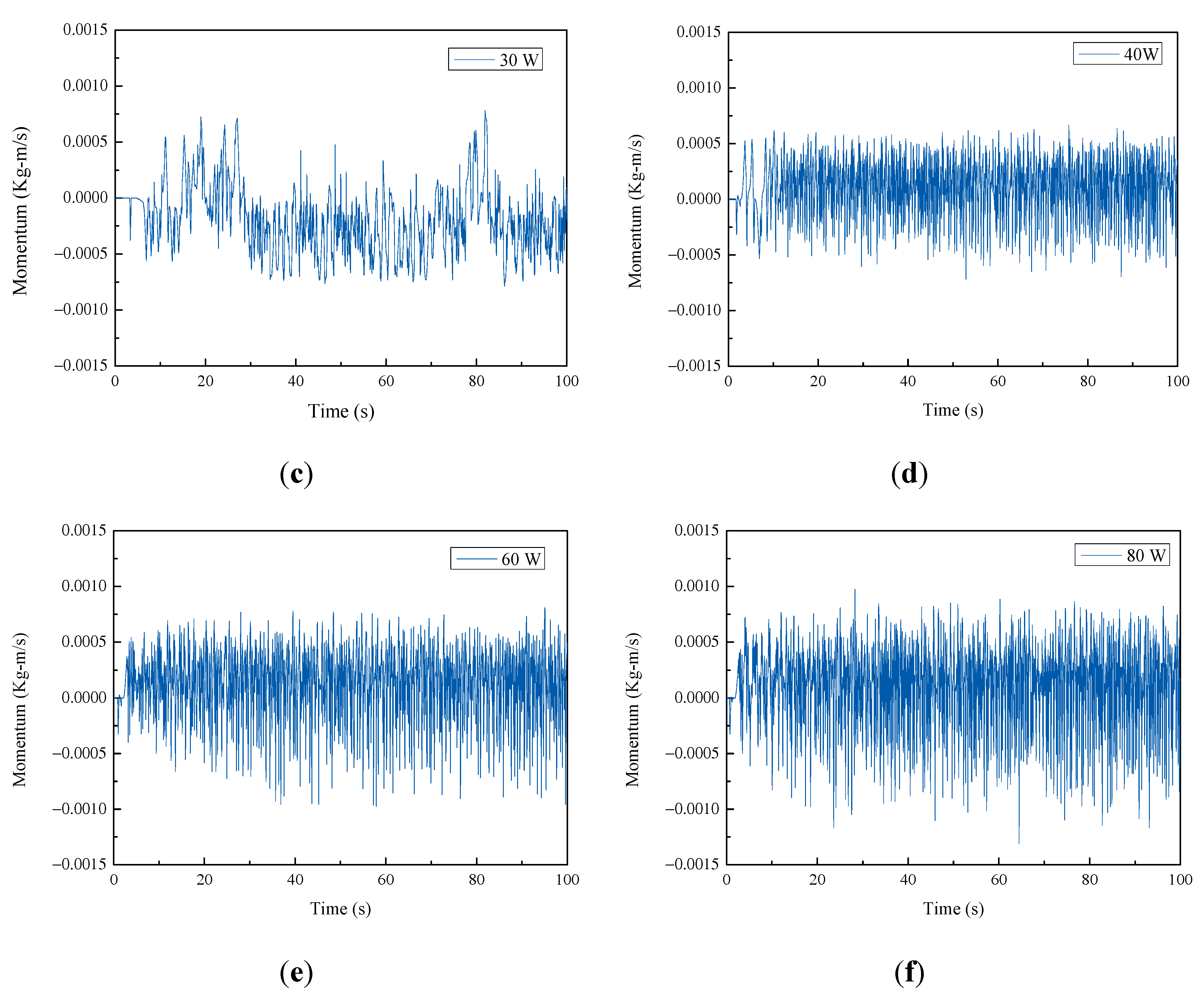
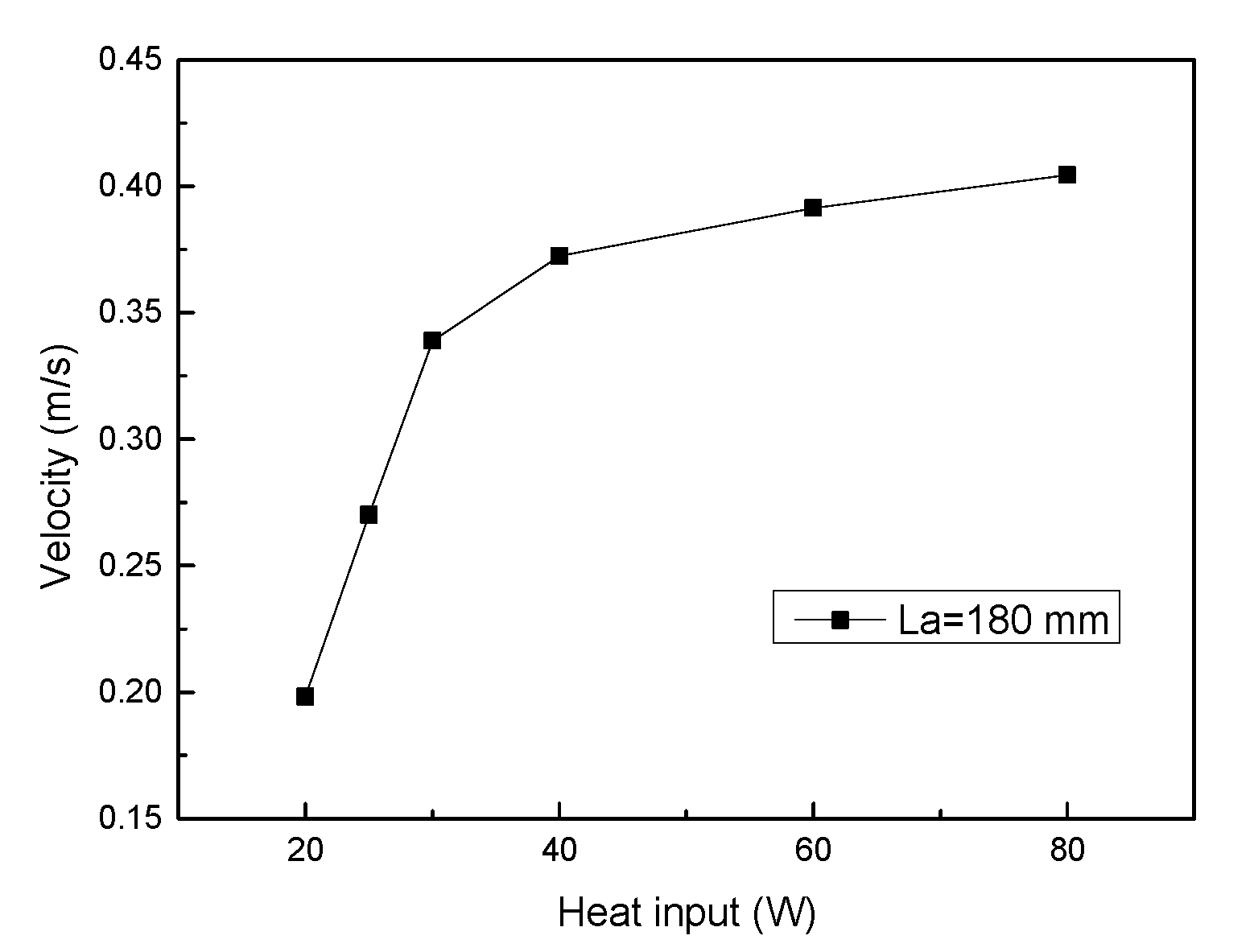
- According to the numerical results, the momentum of the liquid slugs in the PHP increased as the heat input increased. The mean velocity of the liquid slugs in the PHP was in the range of 0.139–0.428 m/s for the heat inputs in the range of 20–80 W, which was consistent with the previous experimental results.
- (2)
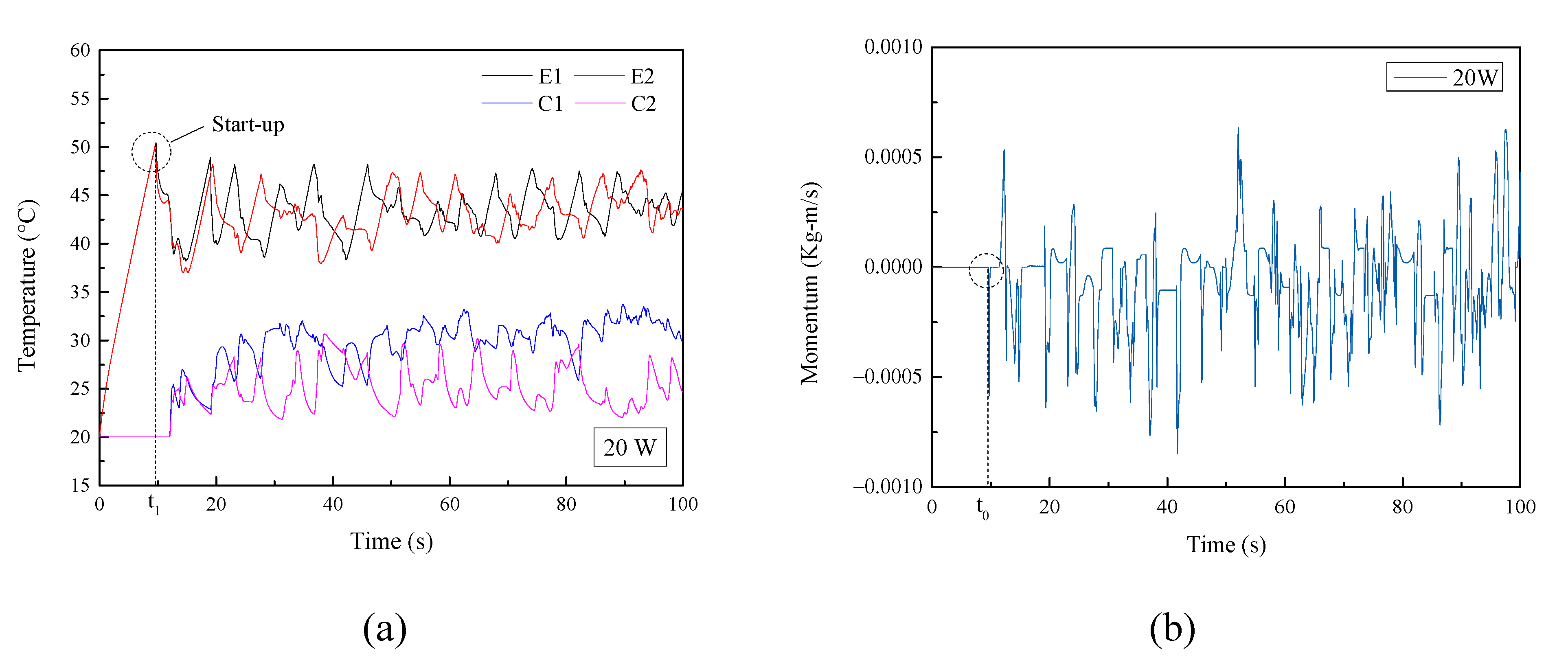
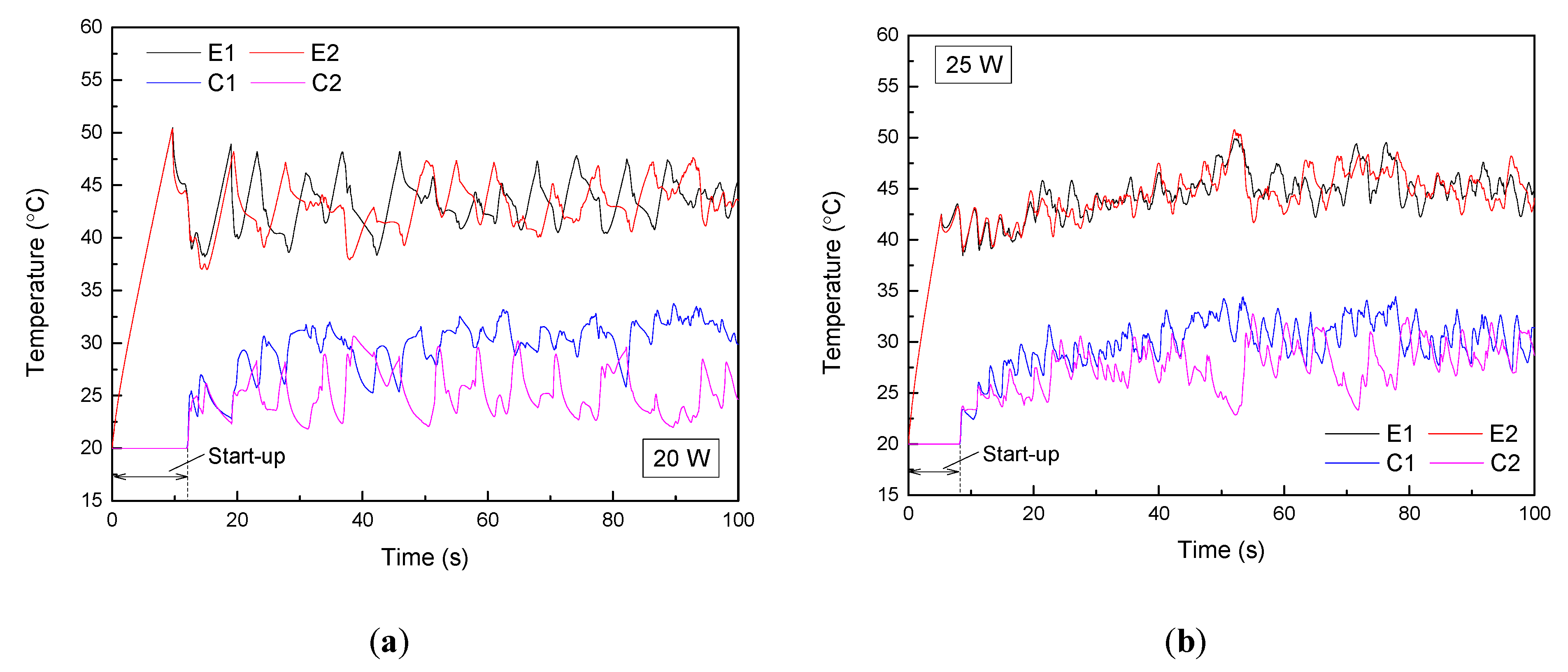
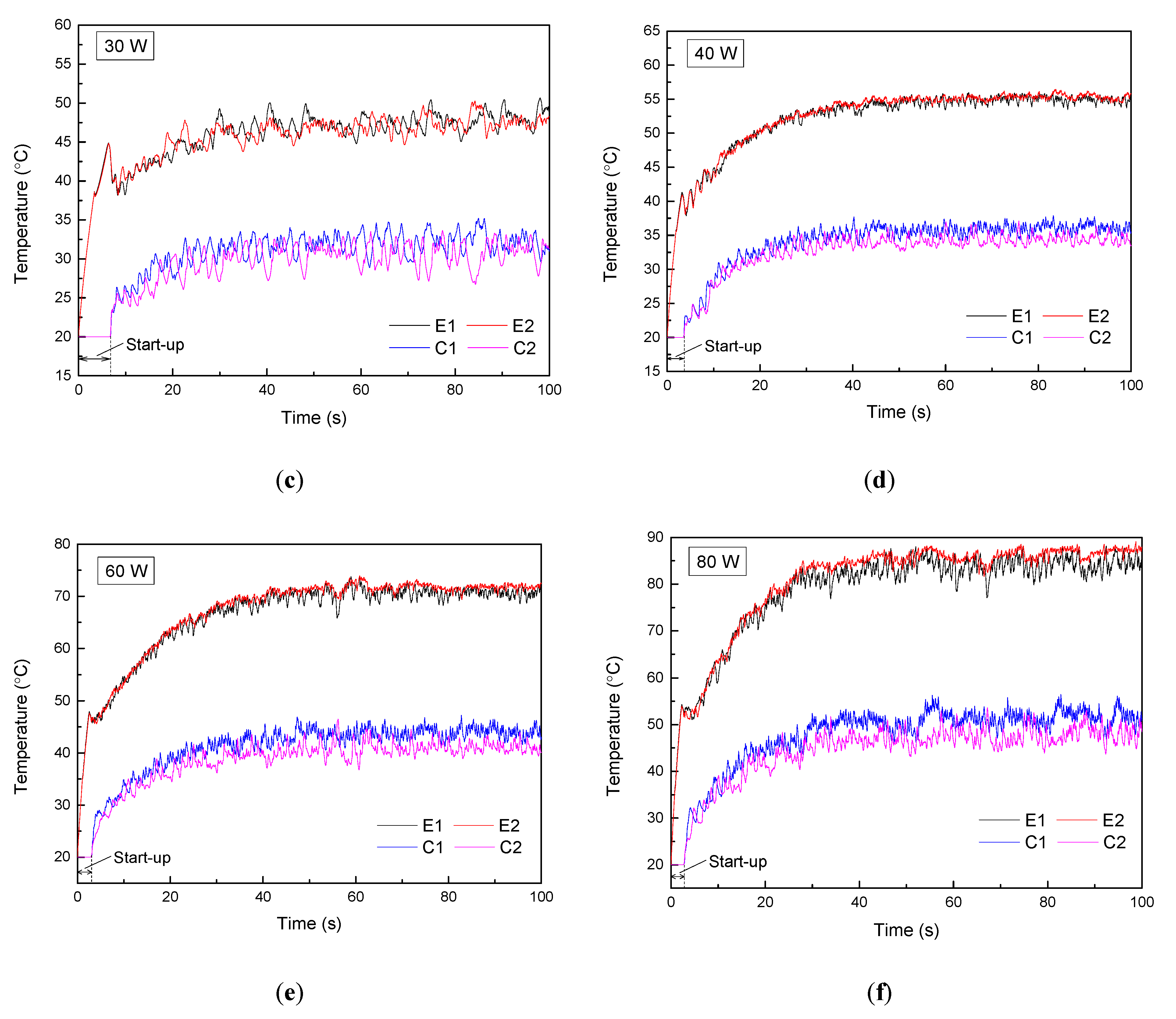
- It was found that at low heat inputs, the wall temperature of the PHP showed higher oscillation amplitude and lower oscillation frequency than that of the PHP at high heat input, because it was more difficult to start the PHP at low heat inputs. Moreover, the start-up time of the PHP reduced as the heat input increased.
- (3)
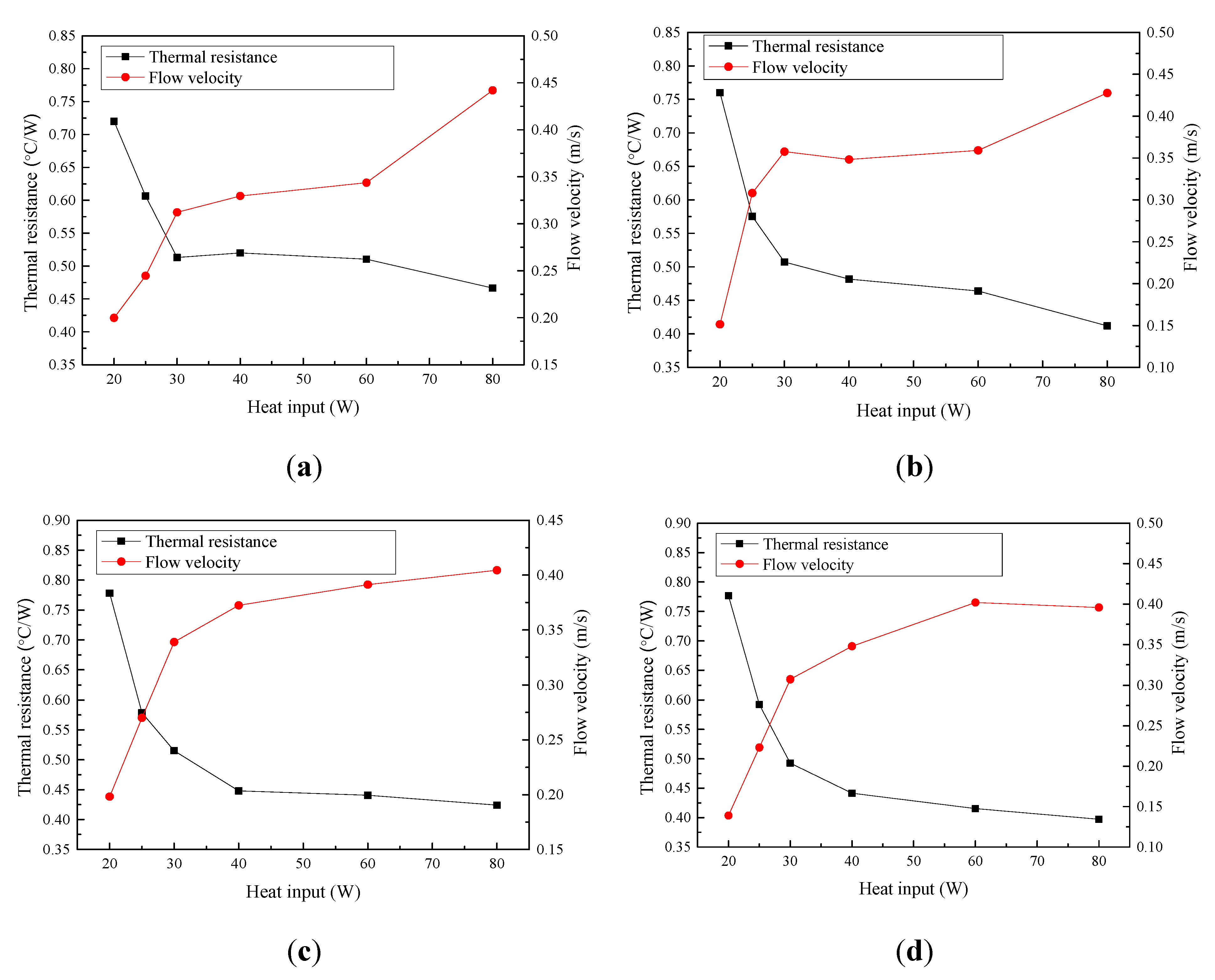
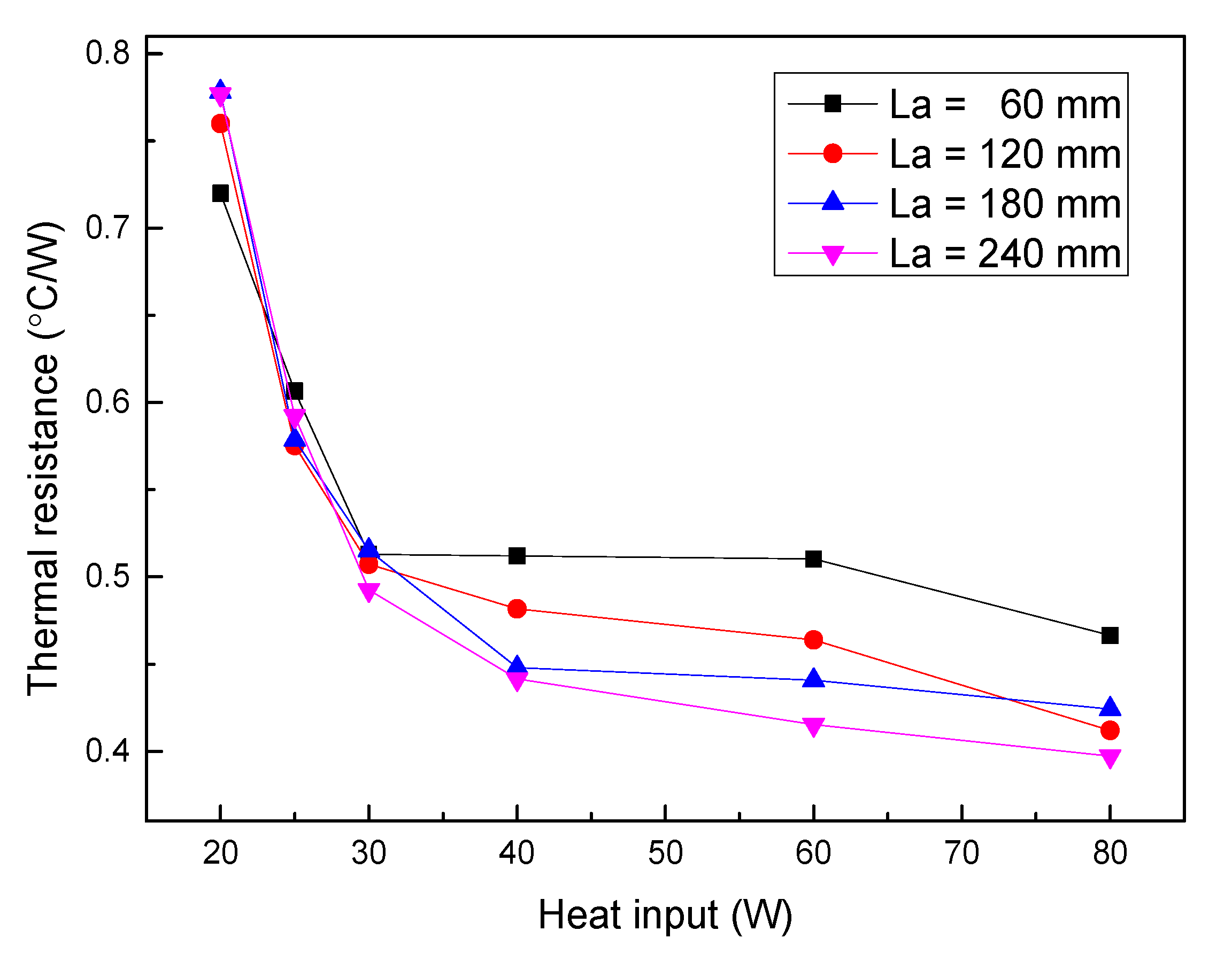
- The start-up performance of the PHP was better with a shorter adiabatic section length. The thermal resistances of the PHP with different adiabatic section lengths were calculated. The PHP with 60 mm adiabatic section length showed the lowest thermal resistance among the PHPs at the heat input of 20 W, whereas the PHP with longer adiabatic section length presented lower thermal resistance at high heat input (≥25 W).
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| m | mass (kg) | Greek symbols | |
| A | area (m2) | ||
| Bo | boiling number | θ | contact angle (°) |
| C1 | condensation temperature monitoring point 1 | λ | thermal conductivity (W m−1 K−1) |
| C2 | condensation temperature monitoring point 2 | μ | viscosity (Pa s) |
| Ca | capillary number | ρ | density (kg m−3) |
| cp | heat capacity (J kg−1 K−1) | σ | surface tension (N m−1) |
| d | diameter (m) | ||
| E1 | evaporation temperature monitoring point 1 | Subscripts | |
| E2 | evaporation temperature monitoring point 2 | ||
| F | force (N) | a | advancing |
| fτ | friction factor | c | cooling water; cross section |
| g | gravity acceleration (m s−2) | cond | condensation |
| h | heat transfer coefficient | e | equilibrium |
| hfg | latent heat (J kg−1) | ex | external |
| K | loss coefficient | f | friction |
| Le | Length (m) | g | gravity |
| Nu | Nusselt number | i | inner; i th vapor plug |
| p | pressure (Pa) | l | liquid |
| Pr | Prantal number | nb | nucleate boiling |
| Q | heat (J) | o | outer |
| R | radius (m) | p | pressure |
| Re | Renolds number | r | receding |
| Rg | gas constant (J kg−1 K−1) | sat | saturation |
| T | temperature (°C) | v | vapor |
| u | velocity (m s−1) | w | wall |
| U | internal energy (J) | wf | wall to fluid |
| V | volume (m3) | ||
| W | work (J) | ||
| x | quality of vapor-liquid mixture |
References
- Han, X.; Wang, X.; Zheng, H.; Xu, X.; Chen, G. Review of the development of pulsating heat pipe for heat dissipation. Renew. Sustain. Energy Rev. 2016, 59, 692–709. [Google Scholar] [CrossRef]
- Wang, X.; Li, B.; Yan, Y.; Gao, N.; Chen, G. Predicting of thermal resistances of closed vertical meandering pulsating heat pipe using artificial neural network model. Appl. Therm. Eng. 2019, 149, 1134–1141. [Google Scholar] [CrossRef]
- Wang, X.; Yan, Y.; Meng, X.; Chen, G. A general method to predict the performance of closed pulsating heat pipe by artificial neural network. Appl. Therm. Eng. 2019, 157, 113761. [Google Scholar] [CrossRef]
- Pouryoussefi, S.; Zhang, Y. Analysis of chaotic flow in a 2D multi-turn closed-loop pulsating heat pipe. Appl. Therm. Eng. 2017, 126, 1069–1076. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Wang, C.; Wang, Y.; Wang, Z.; Li, H.; Lian, C. Study on the effect of the adiabatic section parameters on the performance of pulsating heat pipes. Appl. Therm. Eng. 2020, 180, 115813. [Google Scholar] [CrossRef]
- Mameli, M.; Marengo, M.; Zinna, S. Numerical model of a multi-turn Closed Loop Pulsating Heat Pipe: Effects of the local pressure losses due to meanderings. Int. J. Heat Mass Transf. 2012, 55, 1036–1047. [Google Scholar] [CrossRef]
- Mameli, M.; Marengo, M.; Zinna, S. Thermal Simulation of a Pulsating Heat Pipe: Effects of Different Liquid Properties on a Simple Geometry. Heat Transf. Eng. 2012, 33, 1177–1187. [Google Scholar] [CrossRef]
- Mameli, M.; Marengo, M.; Zinna, S. Numerical Investigation of the Effects of Orientation and Gravity in a Closed Loop Pulsating Heat Pipe. Microgravity-Sci. Technol. 2012, 24, 79–92. [Google Scholar] [CrossRef]
- Senjaya, R.; Inoue, T. Oscillating heat pipe simulation considering bubble generation Part I: Presentation of the model and effects of a bubble generation. Int. J. Heat Mass Transf. 2013, 60, 816–824. [Google Scholar] [CrossRef]
- Senjaya, R.; Inoue, T. Oscillating heat pipe simulation considering bubble generation Part II: Effects of fitting and design parameters. Int. J. Heat Mass Transf. 2013, 60, 825–835. [Google Scholar] [CrossRef]
- Manzoni, M.; Mameli, M.; de Falco, C.; Araneo, L.; Filippeschi, S.; Marengo, M. Advanced numerical method for a thermally induced slug flow: Application to a capillary closed loop pulsating heat pipe. Int. J. Numer. Methods Fluids 2016, 82, 375–397. [Google Scholar] [CrossRef]
- Manzoni, M.; Mameli, M.; de Falco, C.; Araneo, L.; Filippeschi, S.; Marengo, M. Non equilibrium lumped parameter model for Pulsating Heat Pipes: Validation in normal and hyper-gravity conditions. Int. J. Heat Mass Transf. 2016, 97, 473–485. [Google Scholar] [CrossRef]
- Bae, J.; Lee, S.Y.; Kim, S.J. Numerical investigation of effect of film dynamics on fluid motion and thermal performance in pulsating heat pipes. Energy Convers. Manag. 2017, 151, 296–310. [Google Scholar] [CrossRef]
- Daimaru, T.; Yoshida, S.; Nagai, H. Study on thermal cycle in oscillating heat pipes by numerical analysis. Appl. Therm. Eng. 2017, 113, 1219–1227. [Google Scholar] [CrossRef]
- Noh, H.Y.; Kim, S.J. Numerical simulation of pulsating heat pipes: Parametric investigation and thermal optimization. Energy Convers. Manag. 2020, 203, 112237. [Google Scholar] [CrossRef]
- Zhao, J.; Wu, C.; Rao, Z. Numerical study on heat transfer enhancement of closed loop oscillating heat pipe through active incentive method. Int. Commun. Heat Mass Transf. 2020, 115, 104612. [Google Scholar] [CrossRef]
- Xing, M.; Wang, R.; Yu, J. The impact of gravity on the performance of pulsating heat pipe using surfactant solution. Int. J. Heat Mass Transf. 2020, 151, 119466. [Google Scholar] [CrossRef]
- Bao, K.; Wang, X.; Fang, Y.; Ji, X.; Han, X.; Chen, G. Effects of the surfactant solution on the performance of the pulsating heat pipe. Appl. Therm. Eng. 2020, 178, 115678. [Google Scholar] [CrossRef]
- Qu, J.; Wang, Q.; Li, C.; Han, X.; He, Z. A simple model for Taylor flow induced contact angle hysteresis and capillary pressure inside mini/micro-scale capillary tubes. Int. J. Heat Mass Transf. 2014, 78, 1004–1007. [Google Scholar] [CrossRef]
- Xue, Z.H.; Qu, W. Experimental and theoretical research on a ammonia pulsating heat pipe: New full visualization of flow pattern and operating mechanism study. Int. J. Heat Mass Transf. 2017, 106, 149–166. [Google Scholar] [CrossRef] [Green Version]
- Bao, K.; Fang, Y.; Xu, C.; Ji, X.; Qiao, X.; Han, X.; Chen, G. Visual Study on the Effects of SiO2/water and CuO/water Nanofluids on the Start-Up and Heat Transfer Performance of Pulsating Heat Pipe; International Congress of Refrigeration: Montreal, QC, Canada, 2019. [Google Scholar]
- Czajkowski, C.; Nowak, A.I.; Błasiak, P.; Ochman, A.; Pietrowicz, S. Experimental study on a large scale pulsating heat pipe operating at high heat loads, different adiabatic lengths and various filling ratios of acetone, ethanol, and water. Appl. Therm. Eng. 2020, 165, 114534. [Google Scholar] [CrossRef]
- Davis, E.J.; Anderson, G.H. The incipience of nucleate boiling in forced convection flow. AIChE J. 1966, 12, 774–780. [Google Scholar] [CrossRef]
- Whalley, P.B. Boiling Condensation, and Gas-Liquid Flow; Oxford Clarendon Press: New York, NY, USA, 1987; p. 149. [Google Scholar]
- Gungor, K.; Winterton, R. A general correlation for flow boiling in tubes and annuli. Int. J. Heat Mass Transf. 1986, 29, 351–358. [Google Scholar] [CrossRef]
- Van Carey, P. Liquid-Vapor Phase-Change Phenomena; Hemisphere Publishing Corporation: Washington, DC, USA; Philadelphia, PA, USA; London, UK, 1992; pp. 327–328. [Google Scholar]
- Theodore, L.B.; Adrienne, S.L.; Incropera, F.P.; Dewitt, D.P. Fundamentals of Heat and Mass Transfer, 7th ed.; John Wiley& Sons: Hoboken, NJ, USA, 2008; p. 4. [Google Scholar]
- Dobson, M.K.; Chato, J.C. Condensation in Smooth Horizontal Tubes. J. Heat Transf. 1998, 120, 193–213. [Google Scholar] [CrossRef]
- Khandekar, S. Microscale Thermophysical Engineering. Microscale Thermophys. Eng. 2002, 6, 303–317. [Google Scholar] [CrossRef]
- Zhiqing, Y.; Juan, H.; Chaoyi, P.; Yu, C.; Xian, W.; Menglei, W.; Jiping, B. Preparation of a superhydrophobic copper surface and its anti-icing property. J. Funct. Mater. 2016, 47, 13–17. [Google Scholar]
- Pachghare, P.R.; Mahalle, A.M. Thermo-hydrodynamics of closed loop pulsating heat pipe: An experimental study. J. Mech. Sci. Technol. 2014, 28, 3387–3394. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Objectives | Advantages | Limitations | Results |
|---|---|---|---|---|
| 2012 [7] | PHP with different working fluids | Working fluids with different properties were simulated. | Dynamic contact angles were assumed to be zero. | Good agreement between numerical results and experimental data |
| 2012 [6] | PHPs with various working fluids, inclination angles, and number of turns | Local resistance of the bend was considered. | Capillary force on liquid slugs was not calculated. | The performance of PHP was affected by local pressure losses of bends. |
| 2013 [9,10] | Models with different fitting and design parameters | Effect of new bubble generation on PHP’s performance was analyzed. | New bubbles were assumed to generate at given nucleate sites. Local resistance and gravity were ignored. | Simulation with a bubble generation showed that most of the heat was transferred by the sensible heat (74%). |
| 2016 [11,12] | PHP under various gravity levels | Heterogeneous and homogeneous phase changes were calculated | Dynamic contact angles were assumed to be zero, and liquid films were neglected. | The model showed good prediction capability at both normal and hyper-gravity conditions. |
| 2017 [13] | PHP in horizontal and vertical positions | The dynamics of the liquid film was considered. | Local pressure drop and capillary resistance were ignored. | Film dynamics had an important effect on the performance of horizontal PHP. |
| 2017 [14] | Analysis on oscillation waveform for PHP | Local resistance of the bend was considered. | Thickness of liquid film was assumed to be constant. Capillary resistance was ignored. | The propagation of energy was a reason for pressure propagation in PHP. |
| 2020 [15] | PHPs with different inner diameter and number of turns | The dynamic of liquid film was considered. | Capillary resistance was ignored. | There existed an optimum turn number or an optimum channel diameter. |
| 2020 [16] | Operations of PHP under different heating modes | Capillary resistance was calculated. | Local resistance and gravity were ignored. Dynamic contact angles were assumed to be constant. | Oscillations of the vapor pressure and the liquid plug changed with heating modes. |
| Parameters | Value |
|---|---|
| Number of turns | 2 |
| Length of the evaporation section (mm) | 60 |
| Length of the adiabatic section (mm) | 60, 120, 180, 240 |
| Length of the condensation section (mm) | 60 |
| Inner/outer diameter (mm) | 2/3 |
| Radius of the turns (mm) | 10.69, 13.75 |
| Parameters | Value |
|---|---|
| Initial temperature | 20 °C |
| Filling ratio | 0.5 |
| Temperature of the cooling water (°C) | 20 |
| Time step (s) | 1 × 10−5 |
| Grid size (mm) | 1 |
| External heat transfer coefficient hc(W/m2-K) | |
| ΔTeva |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations All authors have read and agreed to the published version of the manuscript.. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, K.; Zhuang, Y.; Gao, X.; Xu, Y.; Wu, X.; Han, X. Transient Numerical Model on the Design Optimization of the Adiabatic Section Length for the Pulsating Heat Pipe. Appl. Sci. 2021, 11, 9432. https://doi.org/10.3390/app11209432
Bao K, Zhuang Y, Gao X, Xu Y, Wu X, Han X. Transient Numerical Model on the Design Optimization of the Adiabatic Section Length for the Pulsating Heat Pipe. Applied Sciences. 2021; 11(20):9432. https://doi.org/10.3390/app11209432
Chicago/Turabian StyleBao, Kangli, Yuan Zhuang, Xu Gao, Yuanyuan Xu, Xilei Wu, and Xiaohong Han. 2021. "Transient Numerical Model on the Design Optimization of the Adiabatic Section Length for the Pulsating Heat Pipe" Applied Sciences 11, no. 20: 9432. https://doi.org/10.3390/app11209432