A Mixed-Integer Convex Model for the Optimal Placement and Sizing of Distributed Generators in Power Distribution Networks





Abstract
:1. Introduction
- A reformulation of the classical model represents the problem of the optimal location and sizing of DERs in power distribution networks by using an MI-SOCP model. This model guarantees the global optimum of the relaxed problem, being indeed a suitable solution to the problem for practical purposes;
- The application of the proposed MI-SOCP model to the optimal sizing and location of DERs considering the unity power factor and variable one is analyzed. Its numerical results confirm that for the unity power factor found in the best solutions reported in scientific literature and the case variable power factor, better solutions are found when compared to the literature reports. In both simulation cases, with minimal computation efforts and reproducible results, i.e., with the assurance of finding the same optimum solution at each simulation run.
2. General Mathematical Model
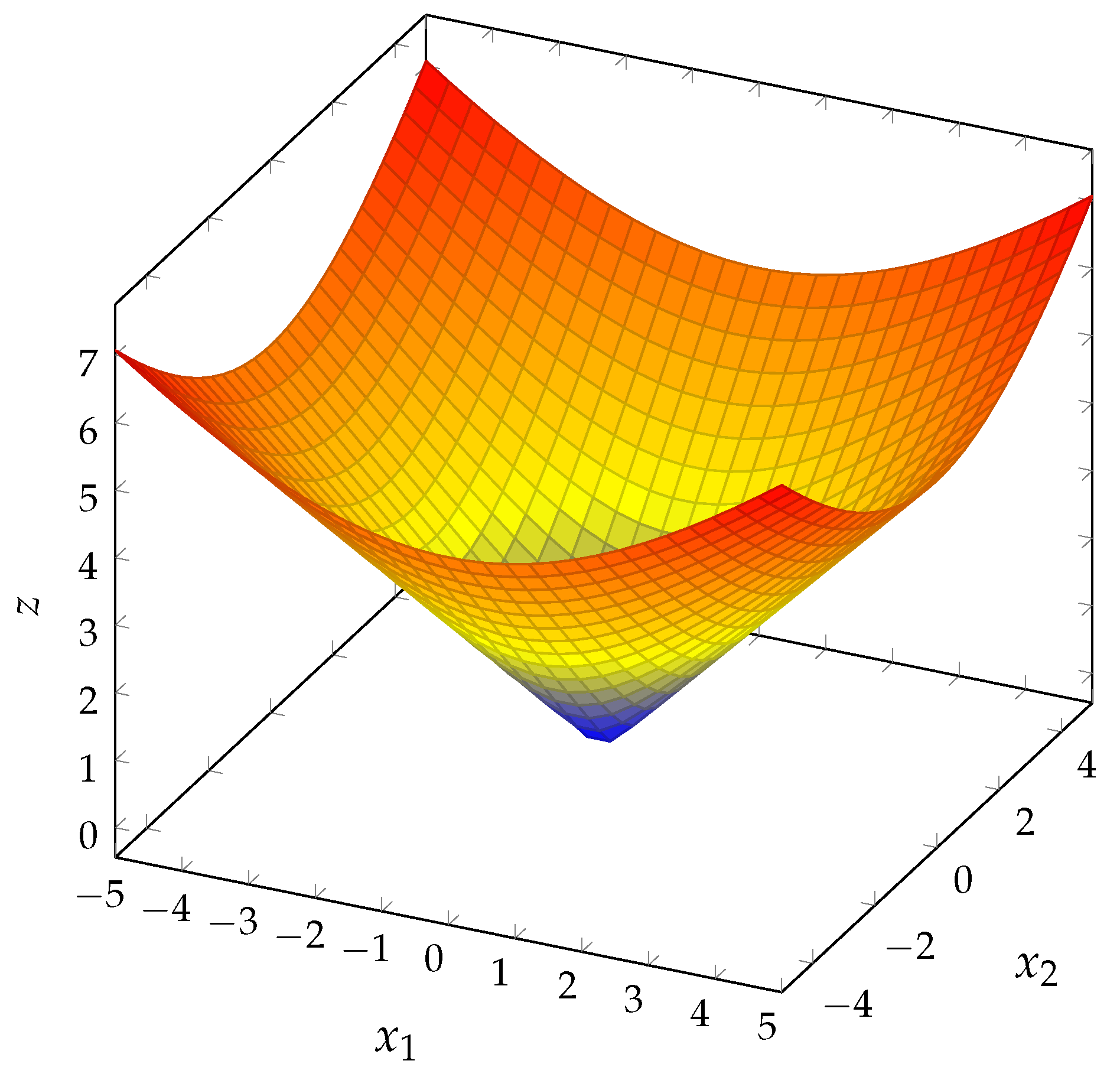
2.1. Objective Function
2.2. Constraints
2.3. Identification of Model Properties
3. SOCP Optimization
3.1. SOCP Approximation for the Power Flow Equations
3.2. Return to the Original Variables
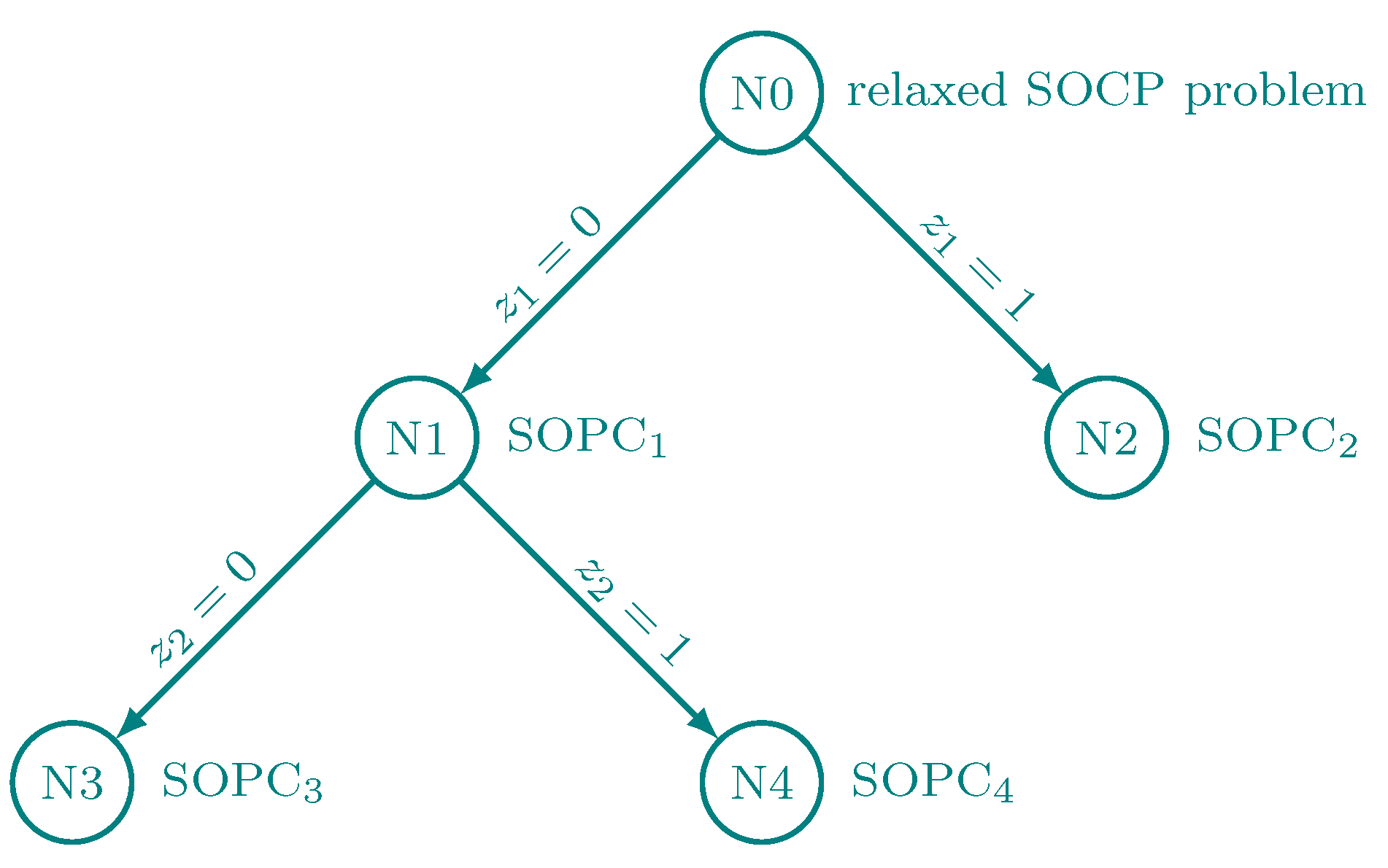
4. Solution of the MI-SOCP Model
5. Test Systems and Simulation Cases
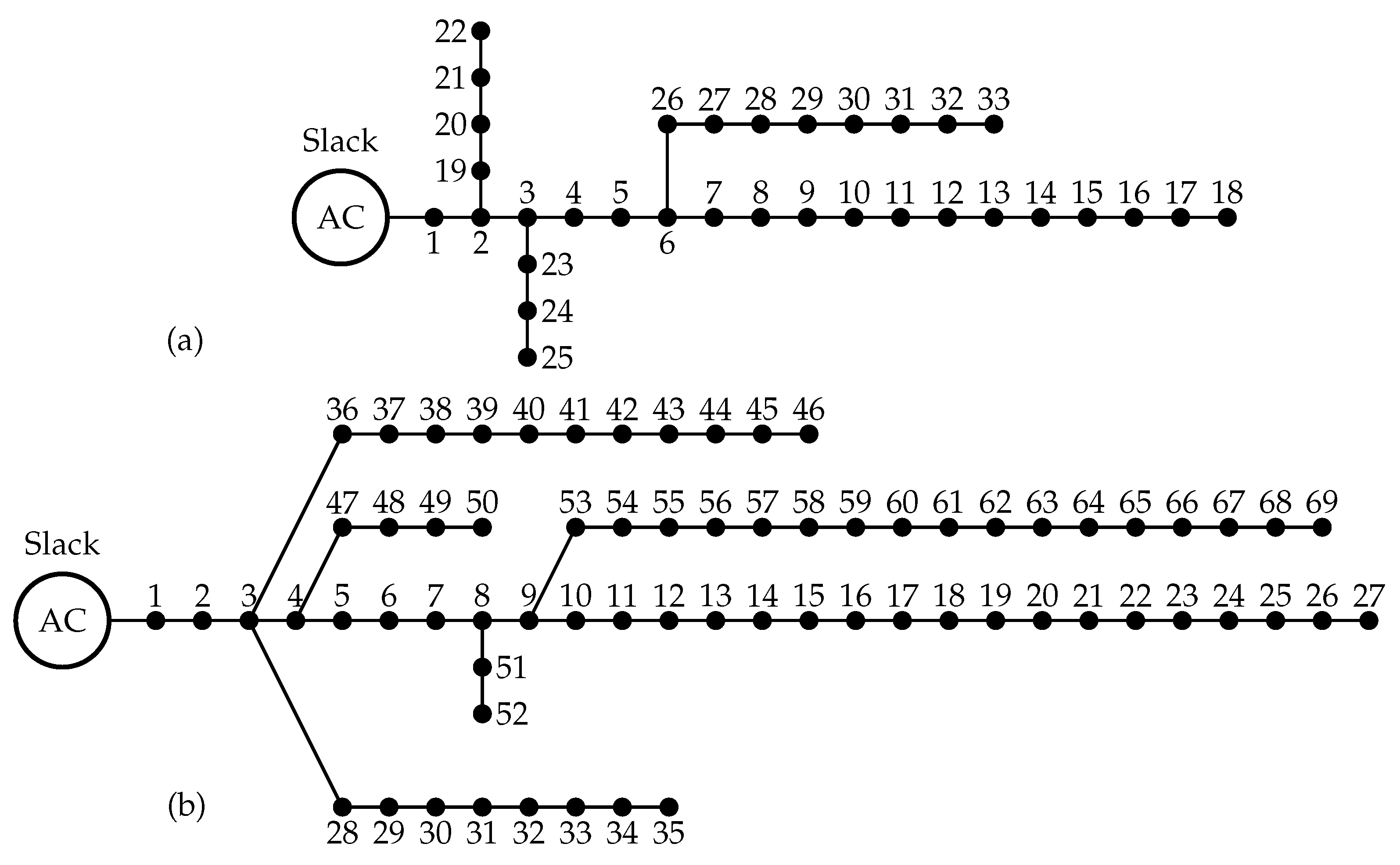
5.1. IEEE 33-Bus System
5.2. IEEE 69-Bus System
5.3. Simulation Cases
- Case-1: This case considers the possibility of installing three DERs. For the IEEE 33-bus system, the capacity of DERs is from 0 kW to 1.2 MW for each one. While for the IEEE 69-bus system, the capacity of DERs is from 0 kW to 2 MW for each one. In addition, each DER is assumed to operate with a unit power factor;
- Case-2: This case also considers the possibility of installing three DERs with the capacity to generate reactive power, i.e., variable power factor.
6. Results
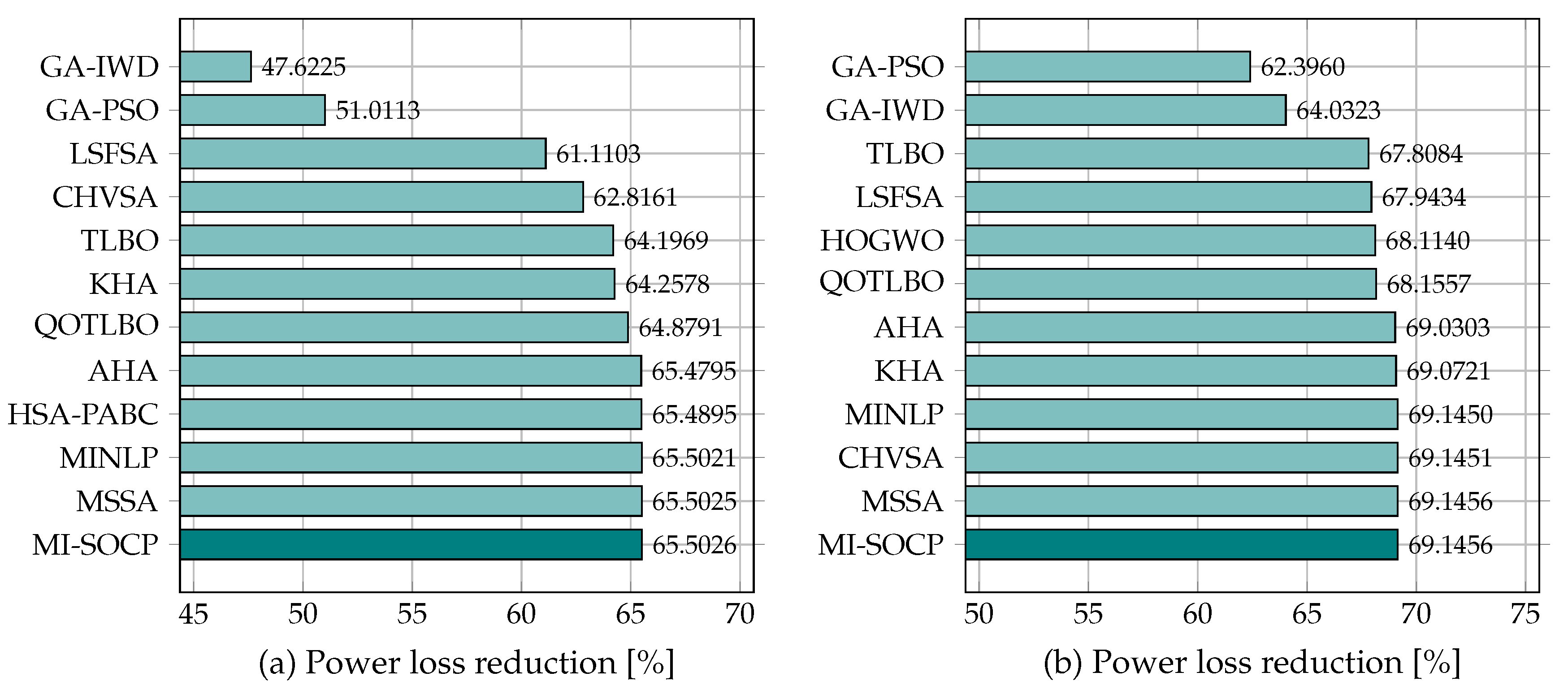
6.1. Results of Case-1
- The proposed MI-SOCP model reaches the optimal solution of the relaxed convex model, which is indeed the optimal solution of the exact nonlinear model with final power losses of around 72.7853 kW and 69.4077 kW for the IEEE 33-bus and IEEE 69-bus systems, respectively. These results are the global optimum of the minimum of the studied problem;
- In the literature, multiple methodologies have identified the same combination of buses for the optimal location of DERs. Nevertheless, the final generated active power by DERs is not equal to the output provided by the proposed MI-SOCP convex model. This entails that the difference lies in implementing optimal power flow since the SOCP model can ensure the global optimum of the problem;
- The solution of the proposed MI-SOCP model can ensure that it is the optimal global solution for the IEEE 33-bus and IEEE 69-bus systems. This is because it has evaluated all the possible nodal combinations by using an exhaustive search combined with a classical optimal power flow (OPF) model solved via interior point methods.
6.2. Results of Case-2
6.3. Comparison with a Hybrid Optimization Approach
- ✓
- The DSCA-SOCP approach being a metaheuristic approach that requires a statistical test based on multiple evaluations to determine its capability of finding the global optimum. In this sense, after 100 consecutive evaluations, the DSCA-SOCP methodology reach the solution reported in Table 4 only 5 times, i.e., an efficiency of 5%, while the proposed MI-SOCP finds the same solution at each running, due to the convex structure of the solution space that guarantees the global optimum finding without recurring to statistical tests;
- ✓
- Each evaluation of the DSCA-SOCP approach (i.e., one complete evaluation) takes about 16,747.35 s with the main problem being that it is not possible to ensure the finding of the optimal solution while the proposed MI-SOCP only takes s to determine the global optimal solution. These processing times show that our proposal is about 53 times more efficient than the DSCA-SOCP approach.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| maximum deviation of the voltages (V). | |
| set of binary numbers. | |
| set of complex numbers. | |
| set of branches. | |
| set of nodes. | |
| limits minimum and maximum of the corresponding variable x (VA). | |
| load at node k (VA). | |
| number of total DERs to be placed in the grid. | |
| total power loss (W). | |
| apparent power of existing generators at node k (VA). | |
| apparent power of new distributed resources at node k (VA). | |
| load flow in the line (VA). | |
| magnitude of voltages squared (V2). | |
| rated voltage of network (V). | |
| nodal voltages (V). | |
| entries of auxiliary matrix (V2). | |
| entries of the (). | |
| binary variable that indicates placement of DERs in node k. |
References
- Kefayat, M.; Ara, A.L.; Niaki, S.N. A hybrid of ant colony optimization and artificial bee colony algorithm for probabilistic optimal placement and sizing of distributed energy resources. Energy Convers. Manag. 2015, 92, 149–161. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L. Relaxed convex model for optimal location and sizing of DGs in DC grids using sequential quadratic programming and random hyperplane approaches. Int. J. Electr. Power Energy Syst. 2020, 115, 105442. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L. An exact MINLP model for optimal location and sizing of DGs in distribution networks: A general algebraic modeling system approach. Ain Shams Eng. J. 2020, 11, 409–418. [Google Scholar] [CrossRef]
- Katyara, S.; Staszewski, L.; Leonowicz, Z. Protection coordination of properly sized and placed distributed generations–methods, applications and future scope. Energies 2018, 11, 2672. [Google Scholar] [CrossRef] [Green Version]
- Floudas, C.A.; Pardalos, P.M. (Eds.) Encyclopedia of Optimization; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Gonzalez-Montoya, D.; Ramos-Paja, C.A. Optimal Sizing and Location of Distributed Generators Based on PBIL and PSO Techniques. Energies 2018, 11, 1018. [Google Scholar] [CrossRef] [Green Version]
- Prado, I.; Garces, L. Chu-Beasley genetic algorithm applied to the allocation of distributed generation. In Proceedings of the 2013 IEEE PES Conference on Innovative Smart Grid Technologies (ISGT Latin America), Sao Paulo, Brazil, 15–17 April 2013; pp. 1–7. [Google Scholar]
- Gandomkar, M.; Vakilian, M.; Ehsan, M. A genetic–based tabu search algorithm for optimal DG allocation in distribution networks. Electr. Power Compon. Syst. 2005, 33, 1351–1362. [Google Scholar] [CrossRef]
- Injeti, S.K.; Kumar, N.P. A novel approach to identify optimal access point and capacity of multiple DGs in a small, medium and large scale radial distribution systems. Int. J. Electr. Power Energy Syst. 2013, 45, 142–151. [Google Scholar] [CrossRef]
- Vc, V.R. Ant Lion optimization algorithm for optimal sizing of renewable energy resources for loss reduction in distribution systems. J. Electr. Syst. Inf. Technol. 2018, 5, 663–680. [Google Scholar]
- Reddy, P.D.P.; Reddy, V.V.; Manohar, T.G. Whale optimization algorithm for optimal sizing of renewable resources for loss reduction in distribution systems. Renew. Wind Water Sol. 2017, 4, 3. [Google Scholar] [CrossRef] [Green Version]
- Sultana, S.; Roy, P.K. Krill herd algorithm for optimal location of distributed generator in radial distribution system. Appl. Soft Comput. 2016, 40, 391–404. [Google Scholar] [CrossRef]
- Mohanty, B.; Tripathy, S. A teaching learning based optimization technique for optimal location and size of DG in distribution network. J. Electr. Syst. Inf. Technol. 2016, 3, 33–44. [Google Scholar] [CrossRef] [Green Version]
- HassanzadehFard, H.; Jalilian, A. A novel objective function for optimal DG allocation in distribution systems using meta-heuristic algorithms. Int. J. Green Energy 2016, 13, 1615–1625. [Google Scholar] [CrossRef]
- Nekooei, K.; Farsangi, M.M.; Nezamabadi-Pour, H.; Lee, K.Y. An improved multi-objective harmony search for optimal placement of DGs in distribution systems. IEEE Trans. Smart Grid 2013, 4, 557–567. [Google Scholar] [CrossRef]
- Othman, M.; El-Khattam, W.; Hegazy, Y.; Abdelaziz, A.Y. Optimal placement and sizing of voltage controlled distributed generators in unbalanced distribution networks using supervised firefly algorithm. Int. J. Electr. Power Energy Syst. 2016, 82, 105–113. [Google Scholar] [CrossRef]
- Sorensen, K. Metaheuristics—The metaphor exposed. Int. Trans. Oper. Res. 2015, 22, 3–18. [Google Scholar] [CrossRef]
- Heliodore, F.; Nakib, A.; Ismail, B.; Ouchraa, S.; Schmitt, L. Performance Evaluation of Metaheuristics. In Metaheuristics for Intelligent Electrical Networks; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2017; pp. 43–58. [Google Scholar] [CrossRef]
- Eftimov, T.; Korošec, P. A novel statistical approach for comparing meta-heuristic stochastic optimization algorithms according to the distribution of solutions in the search space. Inf. Sci. 2019, 489, 255–273. [Google Scholar] [CrossRef]
- Xu, X.; Li, J.; Xu, Z.; Zhao, J.; Lai, C.S. Enhancing photovoltaic hosting capacity—A stochastic approach to optimal planning of static var compensator devices in distribution networks. Appl. Energy 2019, 238, 952–962. [Google Scholar] [CrossRef] [Green Version]
- Montoya, O.D.; Molina-Cabrera, A.; Chamorro, H.R.; Alvarado-Barrios, L.; Rivas-Trujillo, E. A Hybrid Approach Based on SOCP and the Discrete Version of the SCA for Optimal Placement and Sizing DGs in AC Distribution Networks. Electronics 2020, 10, 26. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L.F. Hybrid GA-SOCP Approach for Placement and Sizing of Distributed Generators in DC Networks. Appl. Sci. 2020, 10, 8616. [Google Scholar] [CrossRef]
- Molzahn, D.K.; Hiskens, I.A. A Survey of Relaxations and Approximations of the Power Flow Equations. Found. Trends Electr. Energy Syst. 2019, 4. [Google Scholar] [CrossRef] [Green Version]
- Alizadeh, F.; Goldfarb, D. Second-order cone programming. Math. Program. 2003, 95, 3–51. [Google Scholar] [CrossRef]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Low, S.H. Convex Relaxation of Optimal Power Flow—Part I: Formulations and Equivalence. IEEE Trans. Control Netw. Syst. 2014, 1, 15–27. [Google Scholar] [CrossRef] [Green Version]
- Benson, H.Y.; Saglam, U. Mixed Integer Second Order Cone Programming: A Survey. In Theory Driven by Influential Applications; INFORMS: Catonsville, MD, USA, 2014; Chapter 2; pp. 13–36. [Google Scholar] [CrossRef] [Green Version]
- Karmarkar, N. A new polynomial-time algorithm for linear programming. Combinatorica 1984, 4, 373–395. [Google Scholar] [CrossRef]
- Atamturk, A.; Gómez, A. Submodularity in Conic Quadratic Mixed 0–1 Optimization. Oper. Res. 2020, 68, 609–630. [Google Scholar] [CrossRef] [Green Version]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1. 2014. Available online: http://cvxr.com/cvx (accessed on 3 July 2020).
- Moradi, M.; Abedini, M. A novel method for optimal DG units capacity and location in Microgrids. Int. J. Electr. Power Energy Syst. 2016, 75, 236–244. [Google Scholar] [CrossRef]
- Moradi, M.; Abedini, M. A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 2012, 34, 66–74. [Google Scholar] [CrossRef]
- Bocanegra, S.Y.; Montoya, O.D. Heuristic Approach for Optimal Location and Sizing of Distributed Generators in AC Distribution Networks. Wseas Trans. Power Syst. 2019, 14, 113–121. [Google Scholar]
- Sultana, S.; Roy, P.K. Multi-objective quasi-oppositional teaching learning based optimization for optimal location of distributed generator in radial distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 534–545. [Google Scholar] [CrossRef]
- Bayat, A.; Bagheri, A. Optimal active and reactive power allocation in distribution networks using a novel heuristic approach. Appl. Energy 2019, 233-234, 71–85. [Google Scholar] [CrossRef]
- Muthukumar, K.; Jayalalitha, S. Optimal placement and sizing of distributed generators and shunt capacitors for power loss minimization in radial distribution networks using hybrid heuristic search optimization technique. Int. J. Electr. Power Energy Syst. 2016, 78, 299–319. [Google Scholar] [CrossRef]
- Kaur, S.; Kumbhar, G.; Sharma, J. A MINLP technique for optimal placement of multiple DG units in distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 609–617. [Google Scholar] [CrossRef]
- Gholami, K.; Parvaneh, M.H. A mutated salp swarm algorithm for optimum allocation of active and reactive power sources in radial distribution systems. Appl. Soft Comput. 2019, 85, 105833. [Google Scholar] [CrossRef]
- Nowdeh, S.A.; Davoudkhani, I.F.; Moghaddam, M.H.; Najmi, E.S.; Abdelaziz, A.; Ahmadi, A.; Razavi, S.; Gandoman, F. Fuzzy multi-objective placement of renewable energy sources in distribution system with objective of loss reduction and reliability improvement using a novel hybrid method. Appl. Soft Comput. 2019, 77, 761–779. [Google Scholar] [CrossRef]
- Hung, D.Q.; Mithulananthan, N. Multiple distributed generator placement in primary distribution networks for loss reduction. IEEE Trans. Ind. Electron. 2011, 60, 1700–1708. [Google Scholar] [CrossRef]
- Jain, N.; Singh, S.; Srivastava, S. A generalized approach for DG planning and viability analysis under market scenario. IEEE Trans. Ind. Electron. 2012, 60, 5075–5085. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equation | Property |
|---|---|
| (1) | convex objective (quadratic-convex form) |
| (2) | non-convex |
| (3) | non-convex |
| (4) | convex (SOCP constraint) |
| (5) | convex (box constraint) |
| () | convex (box constraint) |
| (8) | convex (affine inequality constraint) |
| (7) | binary constraint |
| Method | Loss [kW] | Location (Node) | Size [MW] |
|---|---|---|---|
| IEEE 33-bus system | |||
| GA-IWD [31] | 110.5100 | {11,16,32} | {1.2214,0.6833,1.2135} |
| GA-PSO [32] | 103.3600 | {11,16,32} | {0.9250,0.8630,1.2000} |
| LSFSA [12] | 82.0525 | {6,18,30} | {1.1124,0.4874,0.8679} |
| CHVSA [33] | 78.4534 | {6,14,31} | {1.1846,0.6468,0.6881} |
| TLBO [34] | 75.5400 | {10,24,31} | {0.8246,1.0311,0.8862} |
| KHA [12] | 75.4116 | {13,25,30} | {0.8107,0.8368,0.8410} |
| QOTLBO [34] | 74.1008 | {12,24,29} | {0.8808,1.0592,1.0714} |
| AHA [35] | 72.8340 | {13,24,30} | {0.7920,1.0680,1.0270} |
| HSA-PABC [36] | 72.8129 | {14,24,30} | {0.7550,1.0730,1.0680} |
| MINLP [37] | 72.7862 | {13,24,30} | {0.8000,1.0900,1.0500} |
| MSSA [38] | 72.7854 | {13,24,30} | {0.8010,1.0910,1.0530} |
| MI-SOCP | 72.7853 | {13,24,30} | {0.8018,1.0913,1.0536} |
| IEEE 69-bus system | |||
| GA-PSO [32] | 84.5909 | {21,61,63} | {0.9105,1.1926,0.8849} |
| GA-IWD [31] | 80.9100 | {20,61,64} | {0.9115,1.3926,0.8059} |
| TLBO [34] | 72.4157 | {15,61,63} | {0.5919,0.8188,0.9003} |
| LSFSA [12] | 72.1120 | {18,60,65} | {0.4204,1.3311,0.4298} |
| HOGWO [39] | 71.7281 | {18,61,62} | {0.5330,1.0000,0.7730} |
| QOTLBO [34] | 71.6345 | {18,61,63} | {0.5334,1.1986,0.5672} |
| AHA [35] | 69.6669 | {12,21,61} | {0.4710,0.3120,1.6890} |
| KHA [12] | 69.5730 | {12,22,61} | {0.4962,0.3113,1.7354} |
| MINLP [37] | 69.4090 | {11,17,61} | {0.5300,0.3800,1.7200} |
| CHVSA [33] | 69.4088 | {11,17,61} | {0.5284,0.3794,1.7186} |
| MSSA [38] | 69.4077 | {11,18,61} | {0.5260,0.3800,1.7180} |
| MI-SOCP | 69.4077 | {11,18,61} | {0.5268,0.3801,1.7190} |
| Method | Loss [kW] | Location (Node) | Size [MW] | Size [MVAr] | DER Power [MVA] | Loss Red. [%] |
|---|---|---|---|---|---|---|
| IEEE 33-bus system | ||||||
| IA [40] | 23.05 | {06,14,30} | {1.0590,0.7410,1.0590} | {0.6563,0.4592,0.6563} | 2.859 | 89.09 |
| PSO [41] | 15.00 | {13,24,30} | {0.7640,1.0680,1.0160} | {0.5350,0.6130,0.6910} | 3.395 | 92.89 |
| MINLP [37] | 12.74 | {13,24,30} | {0.7660,1.0440,1.1460} | {0.4110,0.5520,0.8590} | 3.481 | 92.89 |
| MI-SOCP | 11.7401 | {13,24,30} | {0.7939,1.0700,1.0297} | {0.3734,0.5171,1.0115} | 3.509 | 94.44 |
| IEEE 69-bus system | ||||||
| IA [40] | 5.0839 | {17,50,61} | {0.6300,0.9000,0.9000} | {0.3900,0.5570,0.5570} | 3.524 | 97.74 |
| PSO [41] | 5.0839 | {18,50,61} | {0.7640,1.0680,1.0160} | {0.5350,0.6130,0.6910} | 3.545 | 97.74 |
| MINLP [37] | 4.2695 | {11,17,61} | {0.7660,1.0440,1.1460} | {0.4110,0.5520,0.8590} | 3.123 | 98.1020 |
| MI-SOCP | 4.2667 | {11,18,61} | {0.4945,0.3783,1.6743} | {0.3533,0.2510,1.1954} | 3.119 | 98.1033 |
| Method | Nodes | Active Power (MW) | (kWh/day) |
|---|---|---|---|
| Base case | — | — | 2666.2860 |
| GAMS-BONMIN | 2046.0656 | ||
| GAMS-COUENNE | 2030.5272 | ||
| GAMS-DICOPT | 2074.0086 | ||
| DSCA-SOCP | 2028.1673 | ||
| MI-SOCP | 2028.1673 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gil-González, W.; Garces, A.; Montoya, O.D.; Hernández, J.C. A Mixed-Integer Convex Model for the Optimal Placement and Sizing of Distributed Generators in Power Distribution Networks. Appl. Sci. 2021, 11, 627. https://doi.org/10.3390/app11020627
Gil-González W, Garces A, Montoya OD, Hernández JC. A Mixed-Integer Convex Model for the Optimal Placement and Sizing of Distributed Generators in Power Distribution Networks. Applied Sciences. 2021; 11(2):627. https://doi.org/10.3390/app11020627
Chicago/Turabian StyleGil-González, Walter, Alejandro Garces, Oscar Danilo Montoya, and Jesus C. Hernández. 2021. "A Mixed-Integer Convex Model for the Optimal Placement and Sizing of Distributed Generators in Power Distribution Networks" Applied Sciences 11, no. 2: 627. https://doi.org/10.3390/app11020627