
Holding Force and Vertical Vibration of Emergency Gate in the Closing Process: Physical and Numerical Modelling


Abstract
:1. Introduction
2. Physical Model Test
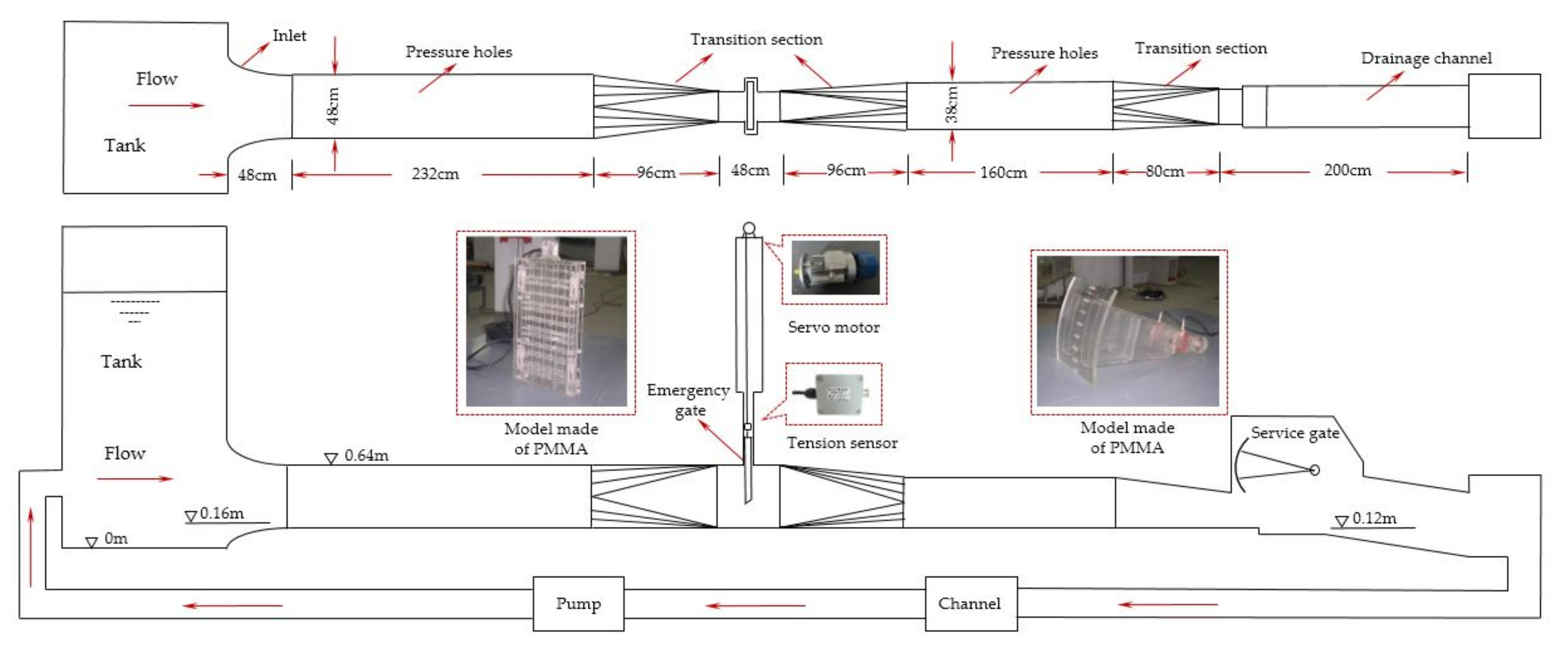
2.1. Model Setup
2.2. Operation Condition
3. Numerical Modelling
3.1. Fluid Conditions
3.2. Motion Equations
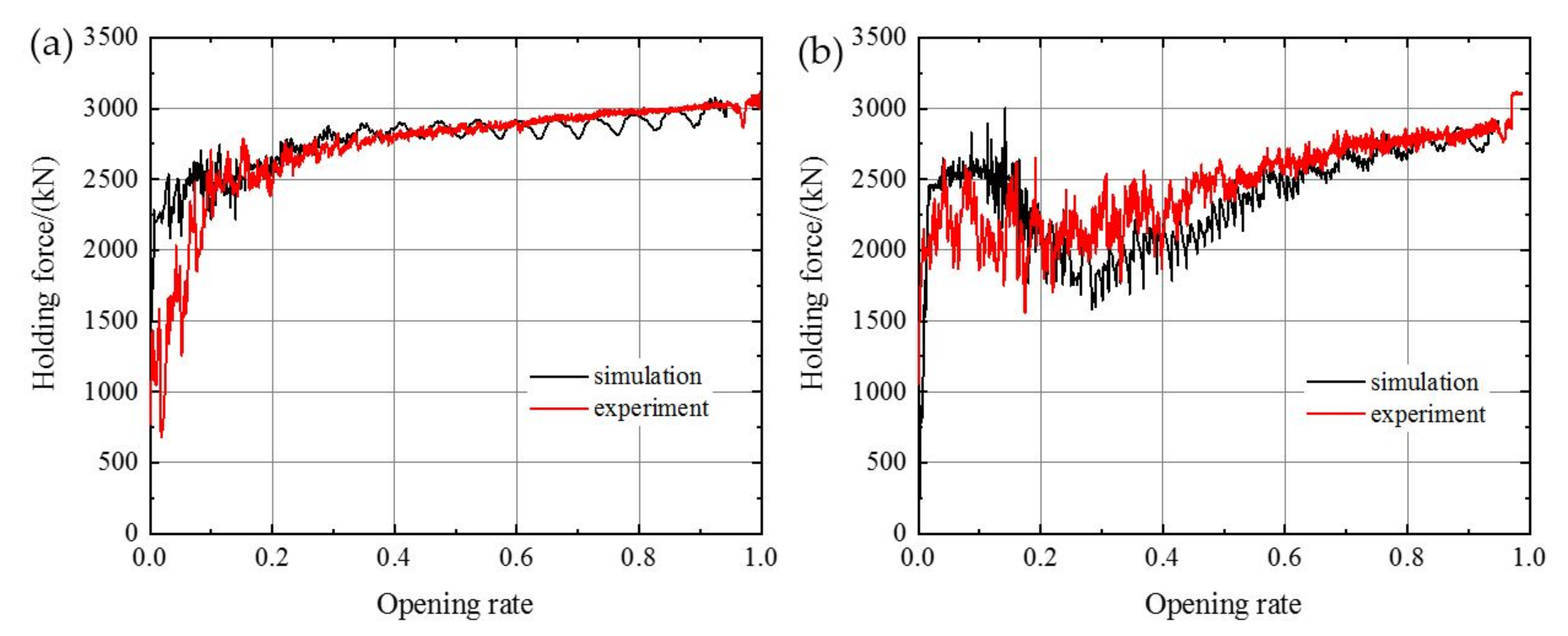
3.3. Mesh Dependence Check and Validation
4. Results
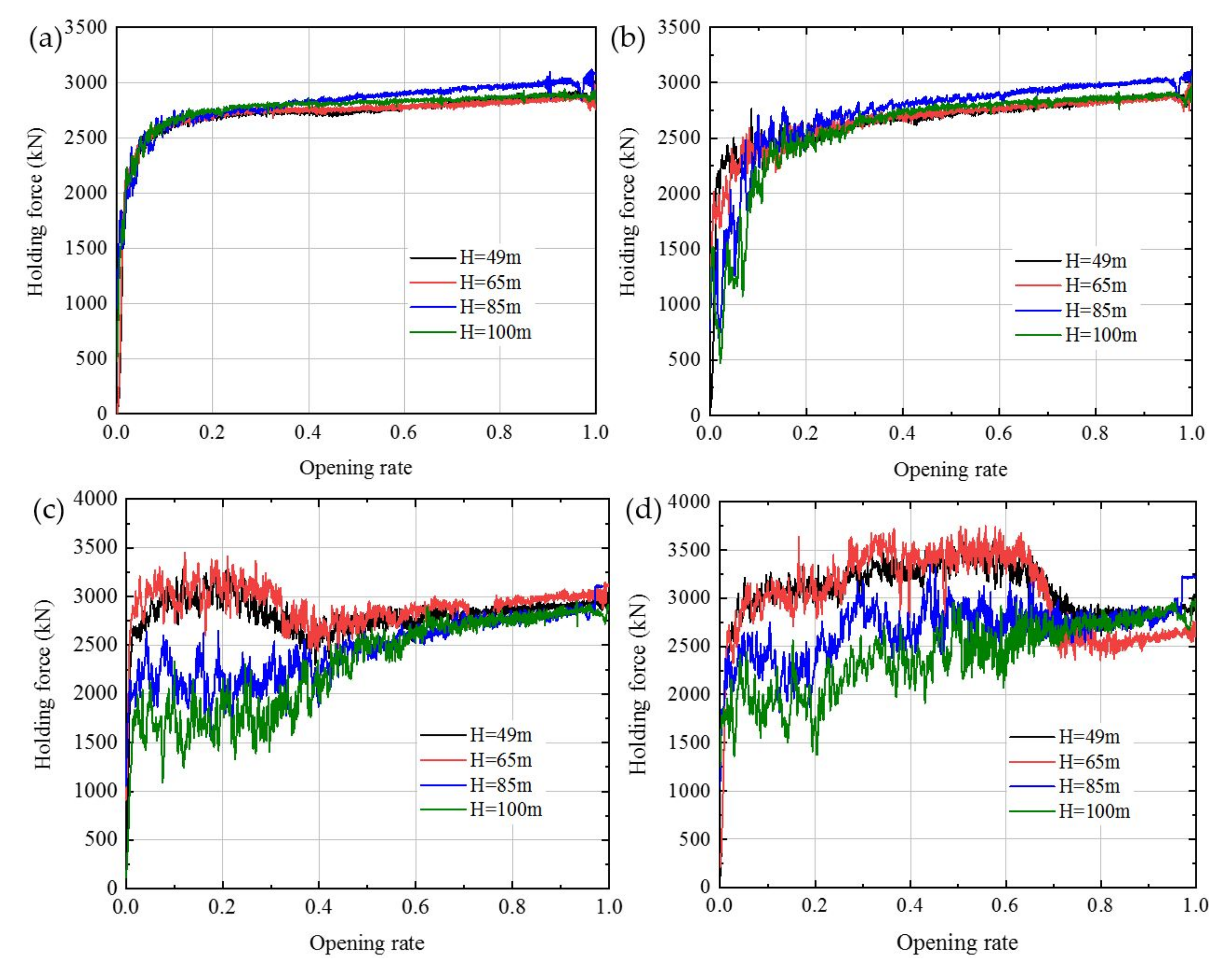
4.1. Results of Hysical Model Test
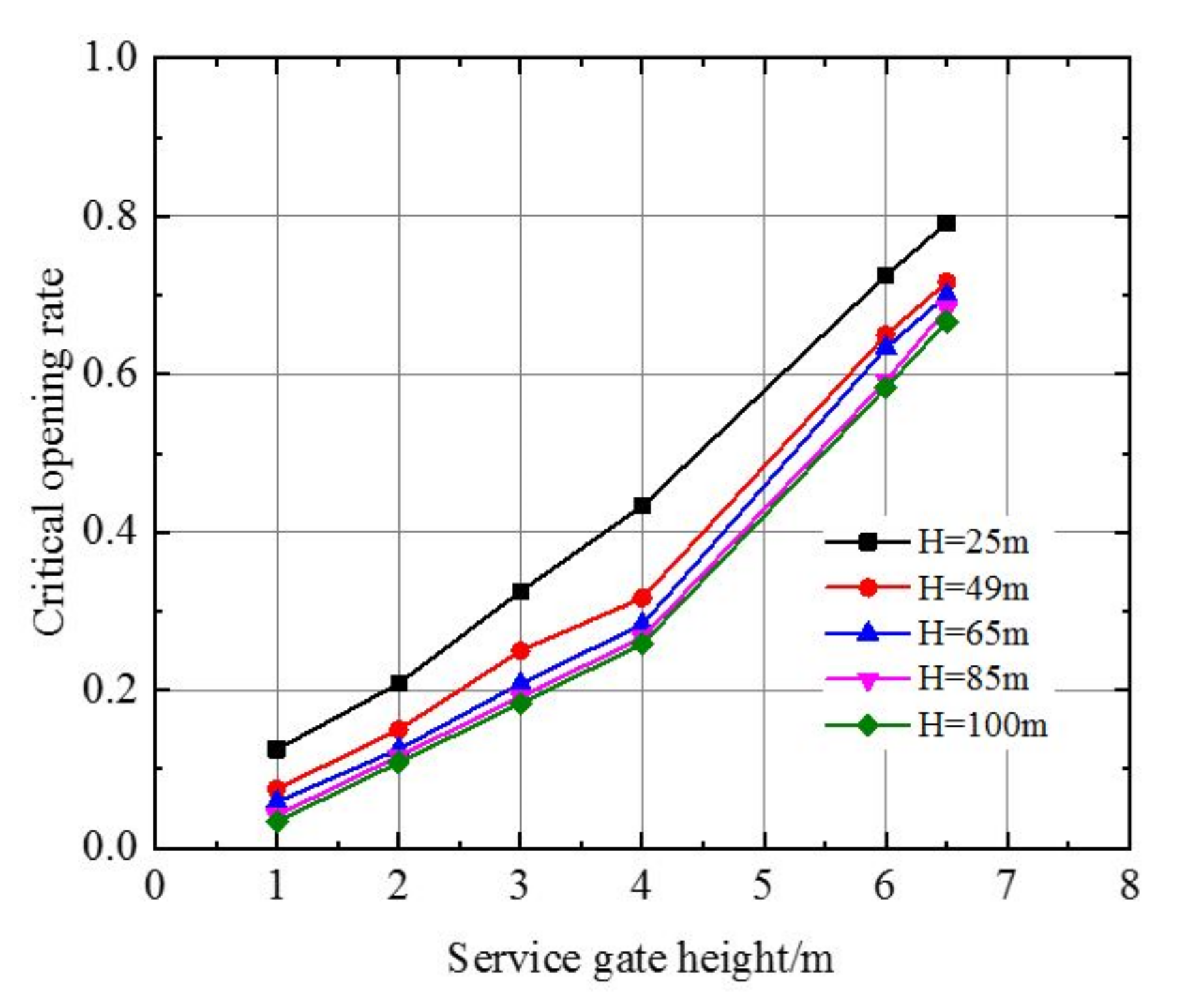
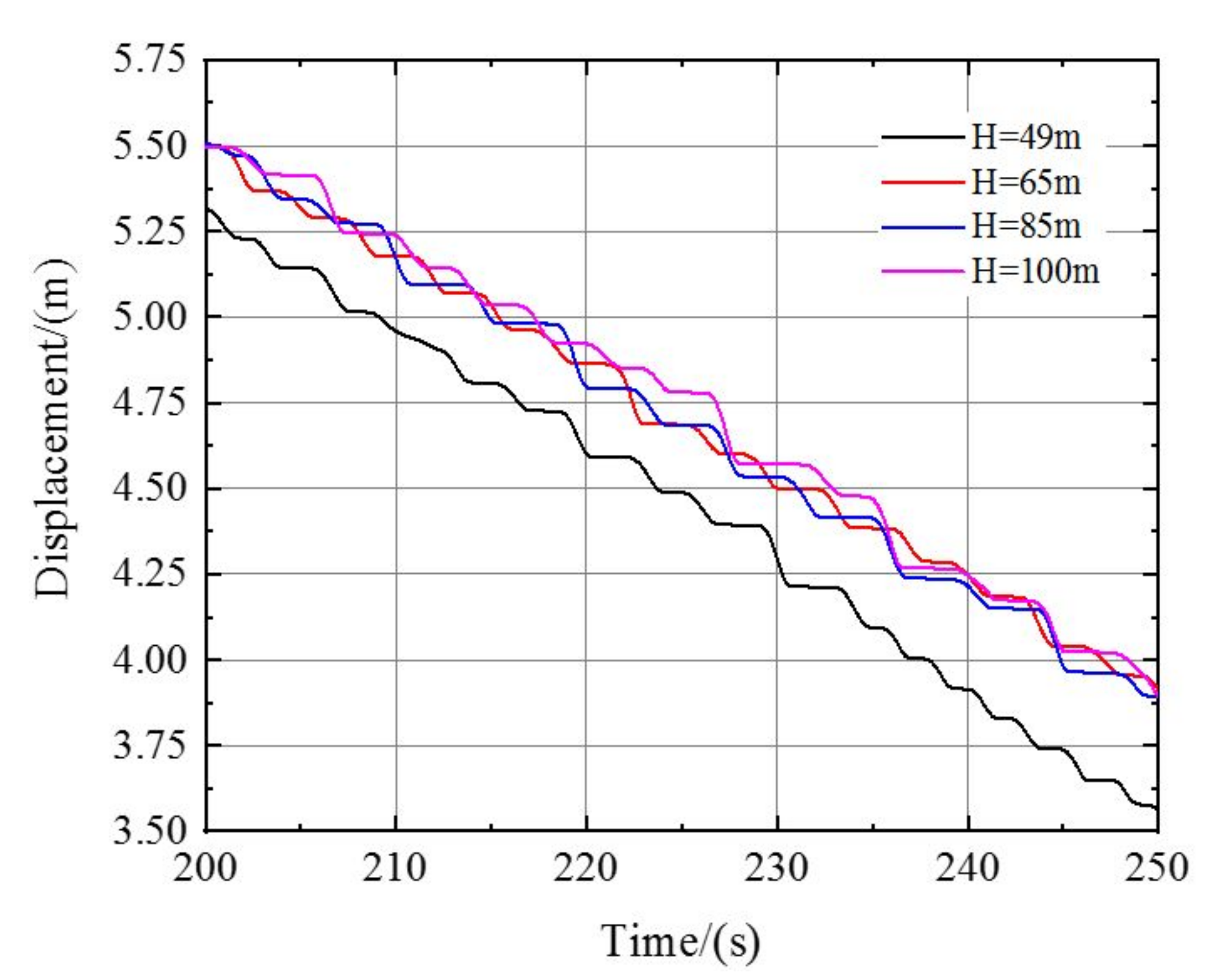
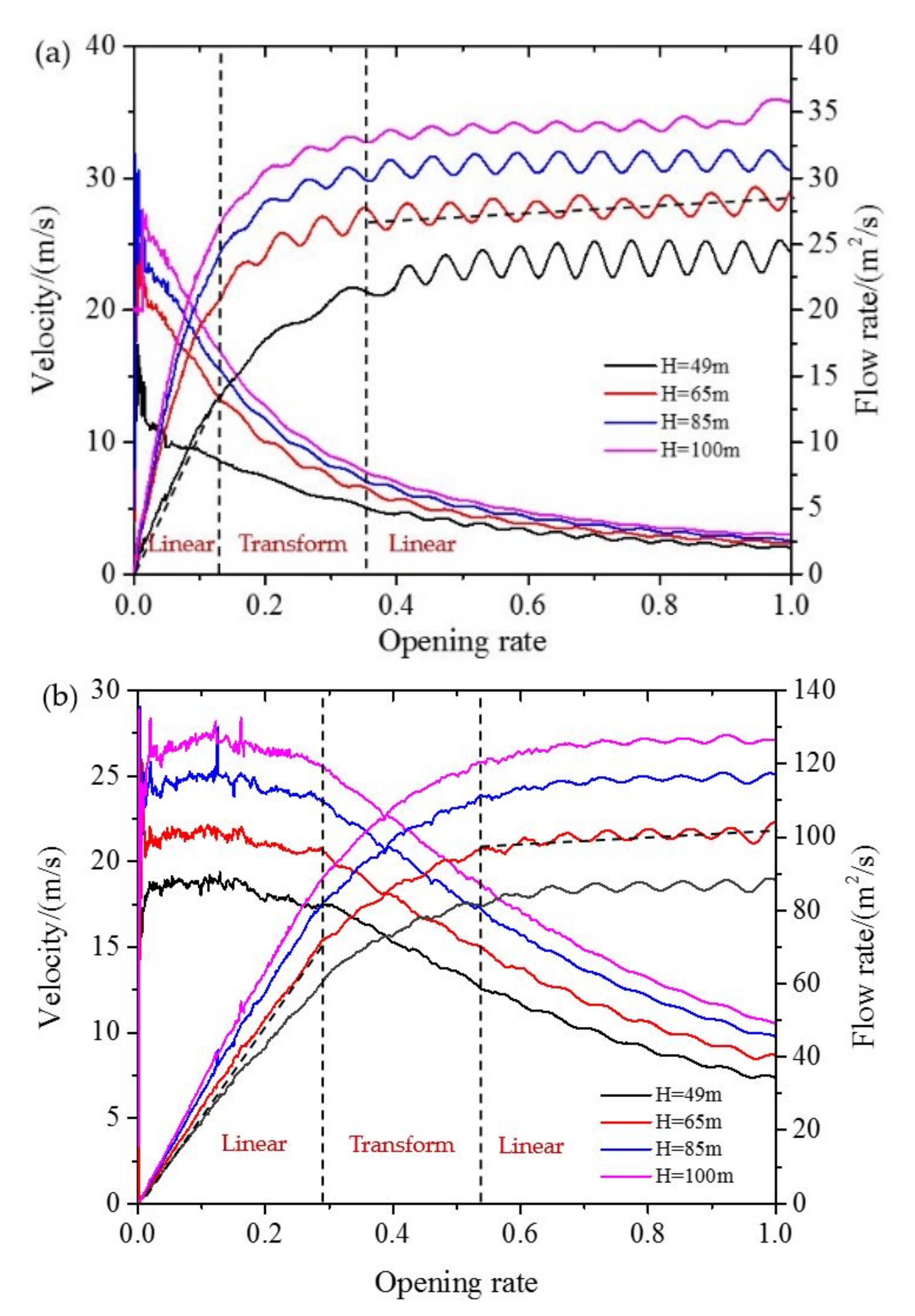
4.2. Results of Numerical Simulation
5. Discussion
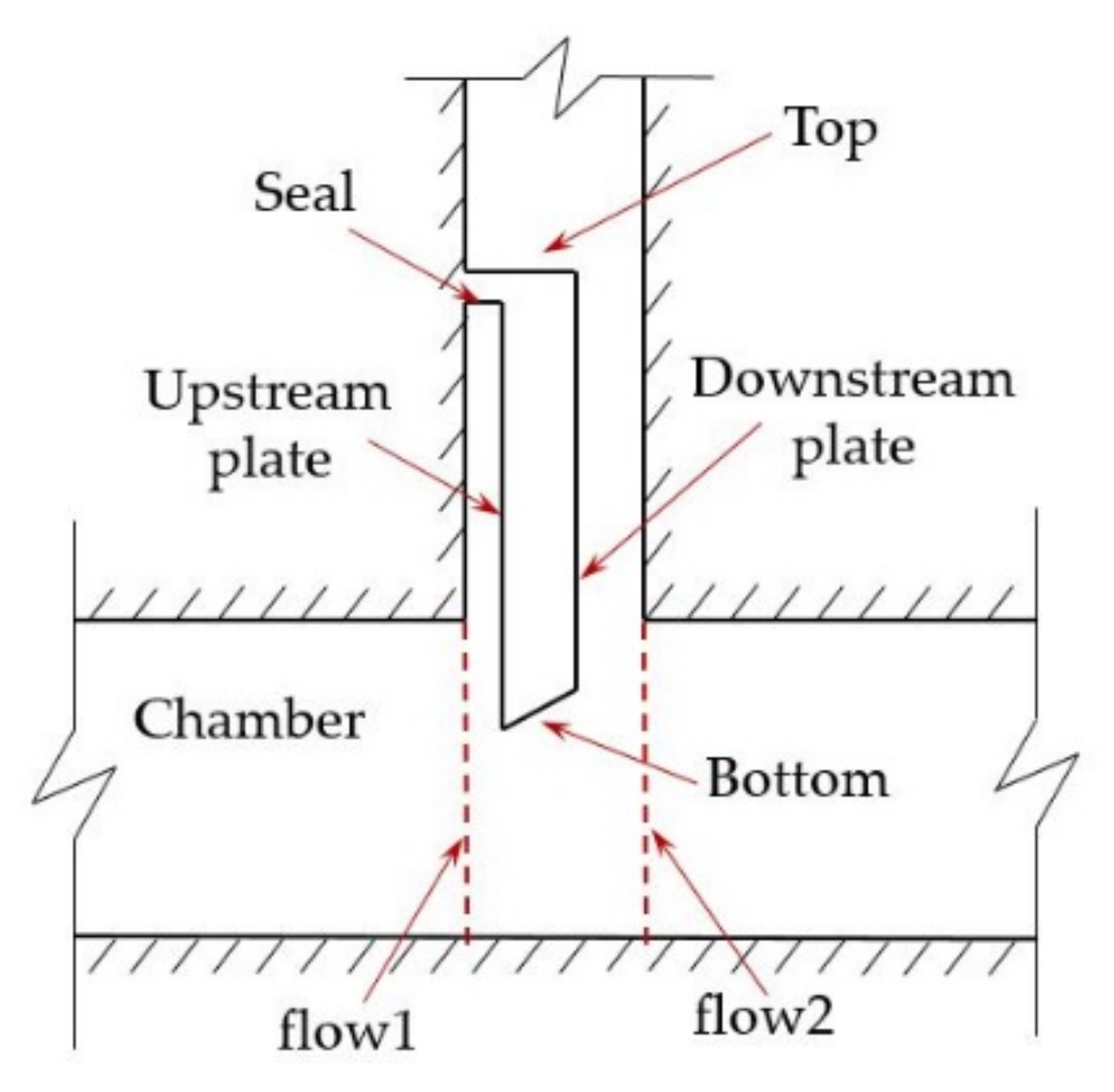
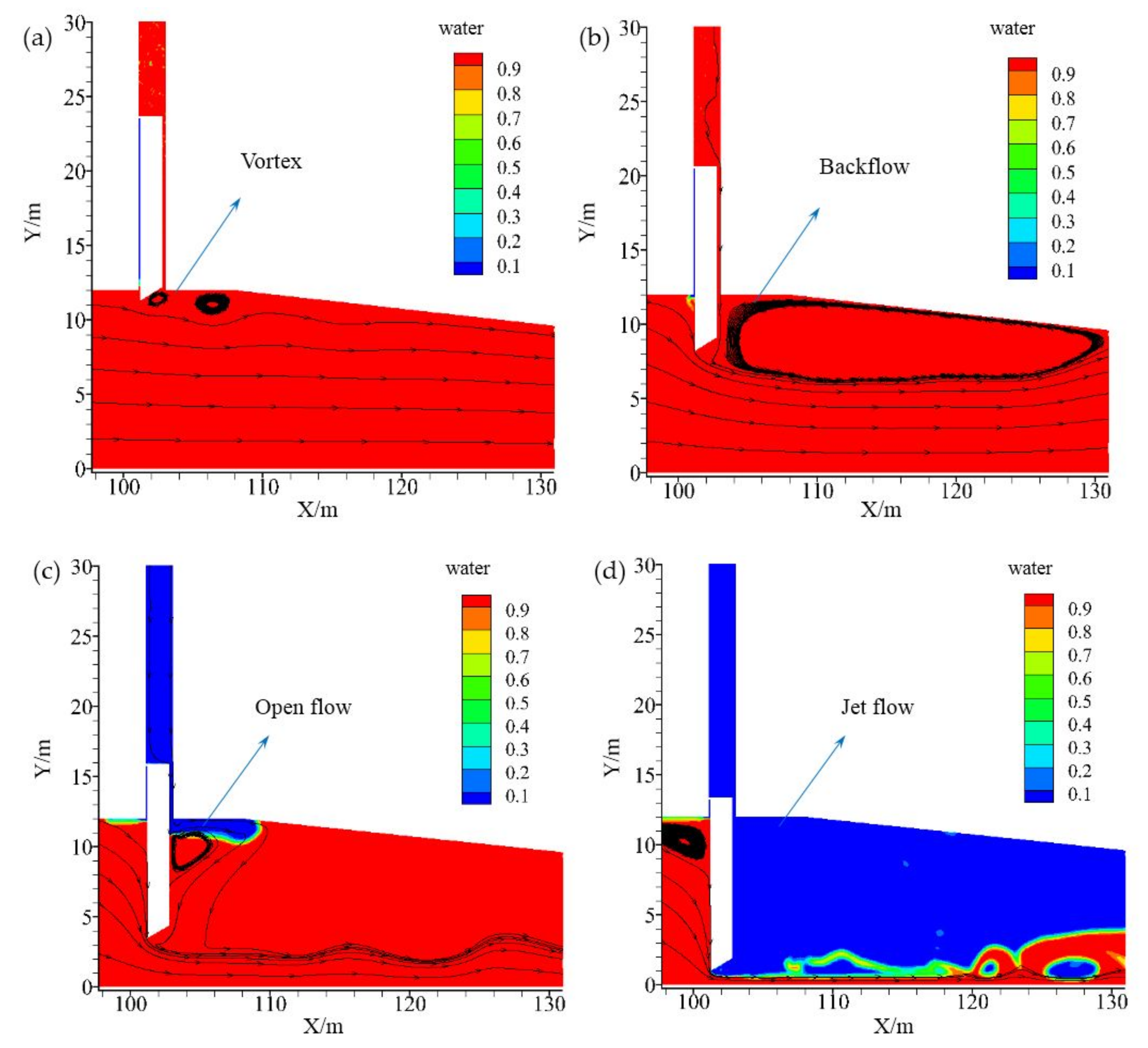
5.1. Flow Field Distribution
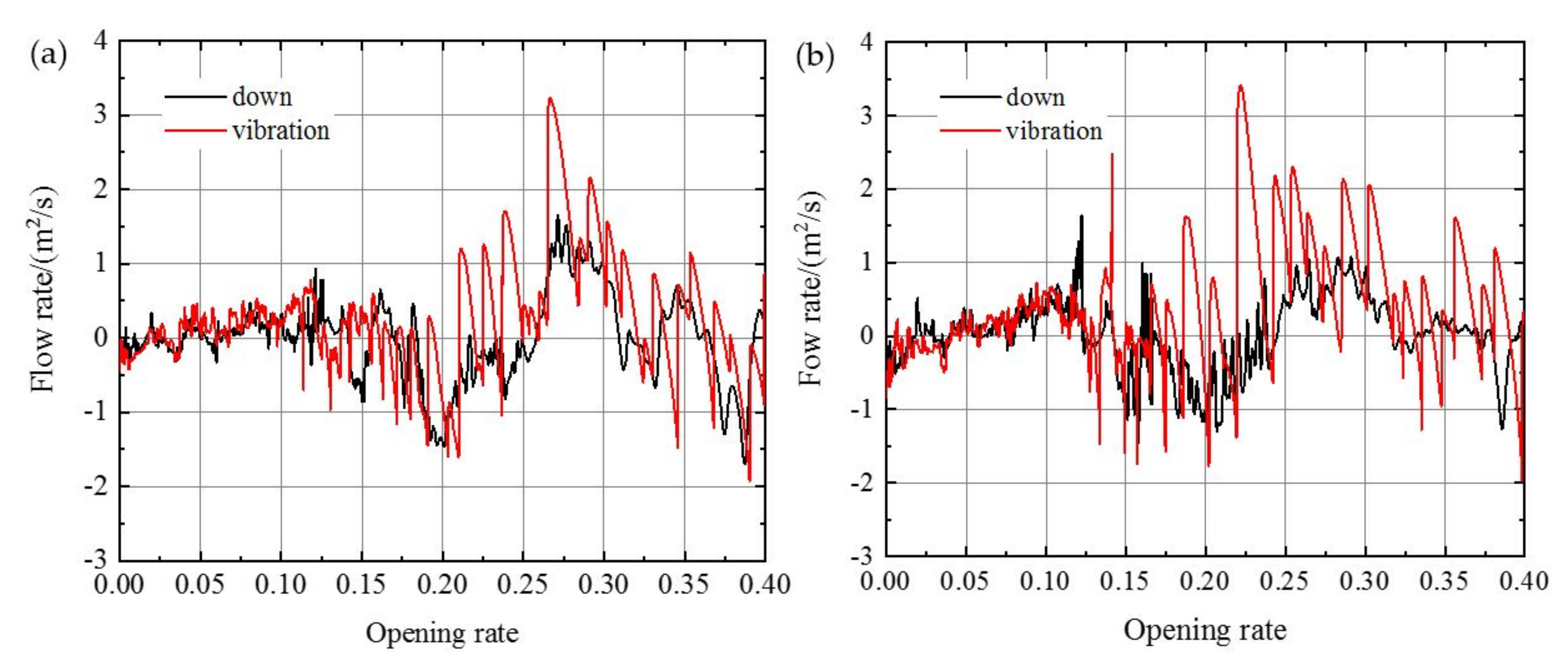
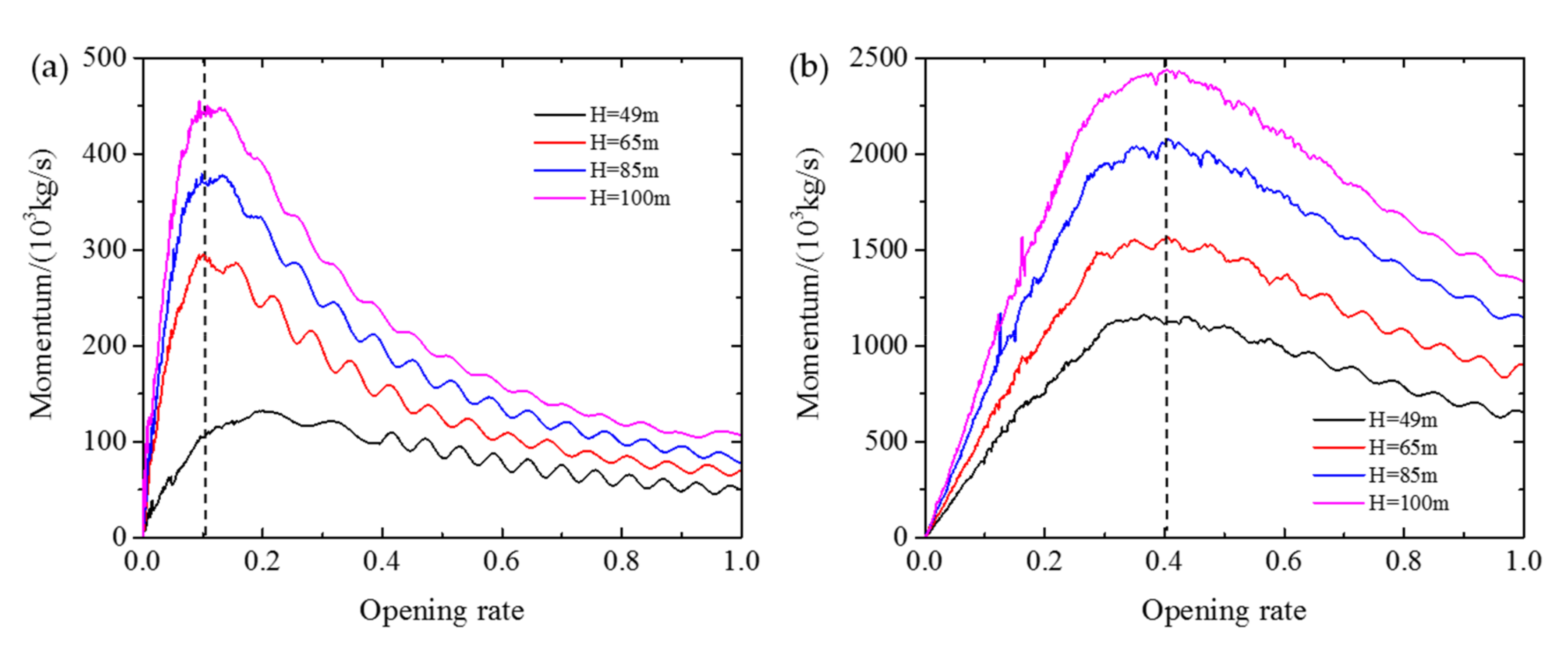
5.2. Relationship of Discharge, Loads and Vertical Vibration
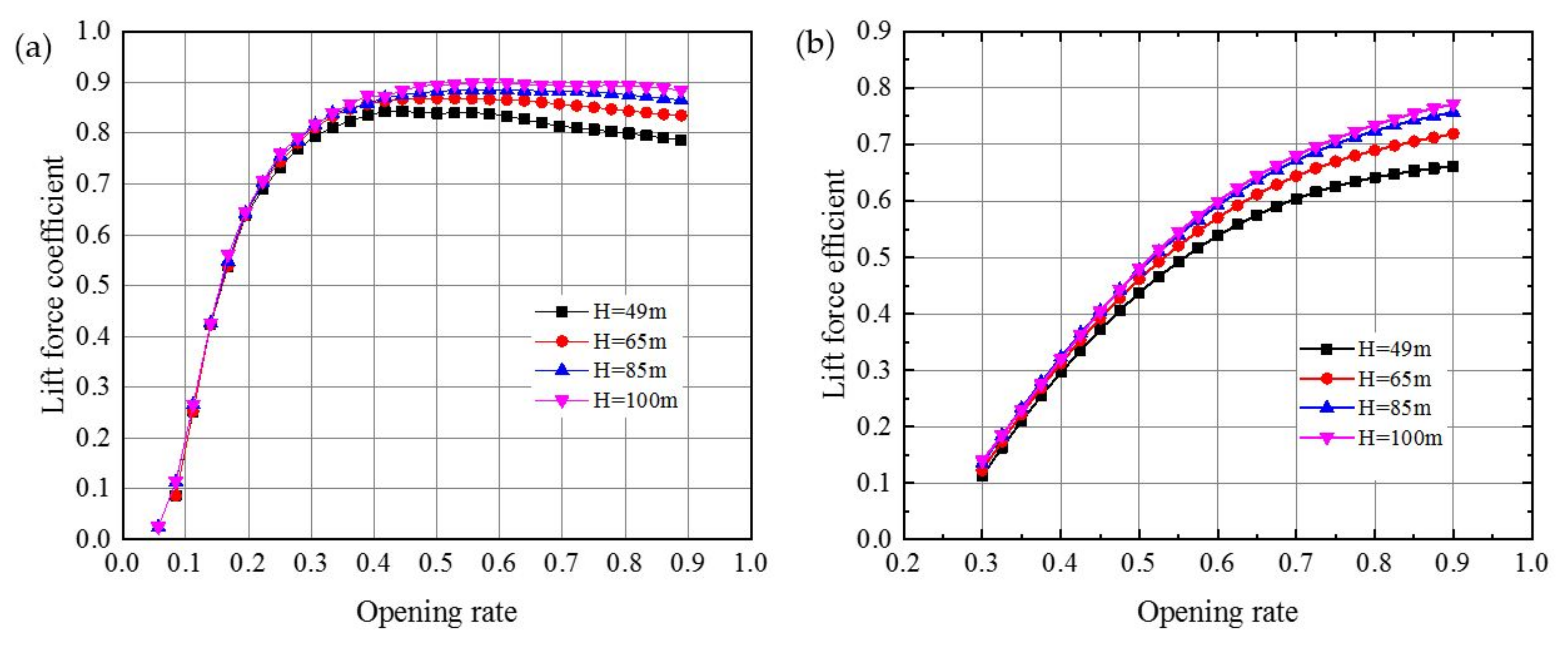
5.3. Factor Analysis
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Peng, Y.; Zhang, J.; Xu, W.-L.; Rubinato, M. Experimental Optimization of Gate-Opening Modes to Minimize Near-Field Vibrations in Hydropower Stations. Water 2018, 10, 1435. [Google Scholar] [CrossRef] [Green Version]
- Naudascher, E. Flow-induced loading and vibration of gates. In Proceedings of the International. Symposium on Hydraulics for High Dams, Beijing, China, 15–18 November 1988; pp. 1–18. [Google Scholar]
- Hardwick, J.D. Flow-induced vibration of vertical-lift gate. J. Hydr. Div. ASCE 1974, 1005, 631–644. [Google Scholar] [CrossRef]
- Jongeling, T.H.G. Flow-induced self-excited in-flow vibrations of gate plates. J. Fluids Struct. 1988, 2, 541–566. [Google Scholar] [CrossRef]
- Thang, N.D.; Naudascher, E. Self-excited vibrations of vertical-lift gate. J. Hydraul. Res. 1986, 24, 391–404. [Google Scholar] [CrossRef]
- Thang, N.D. Gate Vibrations due to Unstable Flow Separation. J. Hydraul. Eng. 1990, 116, 342–361. [Google Scholar] [CrossRef]
- Ishii, N.; Knisely, C.W.; Nakata, A. Coupled-Mode Vibration of Gates with Simultaneous Over-and Underflow. J. Fluids Struct. 1994, 8, 455–469. [Google Scholar] [CrossRef]
- Ogihara, K.; Ueda, S. The Conditions of Self-Excited Vibration Occurring in Radial Gates. In Proceedings of the WaterPower Conference 1999, Las Vegas, NV, USA, 6–9 July 1999; pp. 1–10. [Google Scholar]
- Anami, K.; Ishii, N.; Knisely, C.W.; Tatsuya, T.; Sato, O. Friction-Maintained Dynamic Stability. In Vibration Problems ICOVP 2011; Springer Proceedings in Physics: Berlin/Heidelberg, Germany, 2011; pp. 779–785. [Google Scholar]
- Yang, T.; He, S.; Shen, C.; Qi, Y. Fluid-induced Vibrations Test of Hydraulic Plane Gate for Different Conditions. In Proceedings of the International Conference on Sensors, Shenzhen, China, 27–28 December 2015; pp. 1083–1089. [Google Scholar]
- Jafari, A.; Kabiri-Samani, A.; Behnamfar, F. Flow-induced horizontal and vertical vibration of sluice gates. Water Manag. 2018, 3, 152–162. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, G.; Li, W.; Liu, F.; Duan, Y. Characteristics of Plane Gate Vibration and Holding Force in Closing Process by Experiments. Appl. Sci. 2020, 10, 6111. [Google Scholar] [CrossRef]
- Li, G.; Yang, J.; Yang, B.; Li, B. Analysis on prototype observation on lifting power of spillway tunnel working gate for Tianqiao Hydropower Station. Water Resour. Hydropower Eng. 2005, 36, 1–4. [Google Scholar]
- Ma, C.; Sheng, C.; Lian, J.; Ma, B.; Liu, F. Failure analysis of a leaf gate jammed in closing process. Eng. Fail. Anal. 2020, 110, 104391. [Google Scholar] [CrossRef]
- Kim, N.-G.; Cho, Y.; Lee, K.B. Flow-induced vibration and flow characteristics prediction for a sliding roller gate by two-dimensional unsteady CFD simulation. J. Mech. Sci. Technol. 2017, 31, 3255–3260. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, D.; Zhang, H.; Wu, Y. Hydraulic characteristics of converse curvature section and aerator in high-head and large discharge spillway tunnel. Sci. China Technol. Sci. 2011, 54, 33–39. [Google Scholar] [CrossRef]
- Billeter, P.; Staubli, T. Flow-induced multiple-mode vibrations of gates with submerged discharge. J. Fluids Struct. 2000, 14, 323–338. [Google Scholar] [CrossRef]
- Erdbrink, C.D.; Krzhizhanovskaya, V.V.; Sloot, P. Reducing cross-flow vibrations of underflow gates: Experiments and numerical studies. J. Fluids Struct. 2014, 50, 25–48. [Google Scholar] [CrossRef] [Green Version]
- Liang, C.; Zhang, J.; Lian, J.; Liu, F. Research on slip-stick vibration of emergency gate induced by high dam flood discharge. J. Hydraul. Eng. 2018, 49, 1503–1511. (In Chinese) [Google Scholar]
- Ministry of Water Resources of the People’s Republic of China. Specification for Design of Steel Gate in Hydraulic and Hydroelectric Engineering (NB 35055—2015); China Water & Power Press: Beijing, China, 2015; pp. 52–54. (In Chinese)
- Zhu, H.; Zhou, T. Flow around a circular cylinder attached with a pair of fin-shaped strips. Ocean Eng. 2019, 190, 106484. [Google Scholar] [CrossRef]
- Zhu, H.; Qi, X.; Lin, P.; Yang, Y. Numerical simulation of flow around a submarine pipe with a spoiler and current-induced scour beneath the pipe. Appl. Ocean Res. 2013, 41, 87–100. [Google Scholar] [CrossRef]
- Shen, C.; Wang, W.; He, S.; Xu, Y. Numerical and Experimental Comparative Study on the Flow-Induced Vibration of a Plane Gate. Water 2018, 10, 1551. [Google Scholar] [CrossRef] [Green Version]
- Jelena, M.; Helmut, D. A high head gate innovation numerical and experiment analysis of hydrodynamic forces. Math. Model. Civil Eng. 2010, 2, 27–34. [Google Scholar]
- Lee, S.O.; Seong, H.; Kang, J.W. Flow-induced vibration of a radial gate at various opening heights. Eng. Appl. Comput. Fluid Mech. 2018, 12, 567–583. [Google Scholar] [CrossRef] [Green Version]
- Demirel, E.; Aral, M.M. A Design for Vortex Suppression Downstream of a Submerged Gate. Water 2020, 12, 750. [Google Scholar] [CrossRef] [Green Version]
- Ishill, N.; Knisely, C.W. Flow-induced vibration of shell-type long-span gates. J. Fluids Struct. 1992, 6, 681–703. [Google Scholar]
- Ryszard, R.; Jan, W. Hydrodynamic Pressures Acting upon Hinged-Arc Gates. J. Hydraul. Eng. 1985, 111, 584–599. [Google Scholar]
- Kolkman, P.A.; Vrijer, A. Vertical Gate Vibrations by Galloping or by Fluid Inertia. J. Hydraul. Res. 1987, 25, 418–423. [Google Scholar] [CrossRef]
- Zhou, G.; Li, P.; Liao, D.; Zhang, Y.; Zhong, P. The Friction-Induced Vibration of Water-Lubricated Rubber Bearings during the Shutdown Process. Materials 2020, 13, 5818. [Google Scholar] [CrossRef] [PubMed]
- Sinou, J.J.; Chomette, B. Active vibration control and stability analysis of a time-delay system subjected to friction-induced vibration. J. Sound Vib. 2021, 500, 116013. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Projects | Prototype Size |
|---|---|
| Emergency gate | 7.96 × 12.46 × 1.55 m3 (width × height × thickness) |
| Spillway channel | 6 × 12 m2 (width × height) |
| Support type | Fixed wheel |
| Mass | 235 t |
| Counterweight | 165 t |
| Operation speed | 2 m/min |
| Closing time | 6 min |
| Seal | Upstream seal |
| Gate bottom edge | Downstrem inclination with 30° |
| Operation requirement | Close in transient water and open in still water |
| Minimum Grid Size of Gate Boundary | Force (kN) | Relative Error (%) |
|---|---|---|
| M1 (80 mm) | 38,473.53 | 0.48 |
| M2 (60 mm) | 38,274.68 | −0.04 |
| M3 (40 mm) | 38,435.01 | 0.38 |
| Upstream Water Depth | Service Gate Height 1.0 m | Service Gate Height 4.0 m | ||||
|---|---|---|---|---|---|---|
| Experiment | Simulation | Relative Error/% | Experiment | Simulation | Relative Error/% | |
| 49 m | 18,335.80 | 18,549.44 | −1.16 | 6216.14 | 6194.58 | 0.34 |
| 65 m | 24,128.58 | 24,847.90 | −2.98 | 8794.52 | 8745.52 | 0.56 |
| 85 m | 30,601.46 | 31,946.04 | −4.39 | 11,048.52 | 11,336.64 | −2.60 |
| 100 m | 38,288.60 | 39,619.44 | −3.47 | 14,732.36 | 13,659.24 | 7.08 |
| Water Depth (m) | 49 | 65 | 85 | 100 | |
|---|---|---|---|---|---|
| Service gate height 1 m | bottom | 0.600 ** | 0.984 ** | 0.986 ** | 0.983 ** |
| upstream | −0.308 ** | −0.752 ** | −0.783 ** | −0.743 ** | |
| downstream | 0.765 ** | 0.988 ** | 0.987 ** | 0.984 ** | |
| seal | 0.555 ** | −0.190 ** | −0.361 ** | −0.117 ** | |
| top | 0.735 ** | 0.979 ** | 0.980 ** | 0.983 ** | |
| Service gate height 4 m | bottom | 0.907 ** | 0.896 ** | 0.892 ** | 0.889 ** |
| upstream | −0.950 ** | −0.873 ** | −0.936 ** | −0.896 ** | |
| downstream | 0.858 ** | 0.861 ** | 0.866 ** | 0.867 ** | |
| seal | −0.749 ** | −0.604 ** | −0.776 ** | −0.725 | |
| top | 0.798 ** | 0.826 ** | 0.84 5 ** | 0.851 ** | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Xu, G.; Liu, F. Holding Force and Vertical Vibration of Emergency Gate in the Closing Process: Physical and Numerical Modelling. Appl. Sci. 2021, 11, 8440. https://doi.org/10.3390/app11188440
Wang Y, Xu G, Liu F. Holding Force and Vertical Vibration of Emergency Gate in the Closing Process: Physical and Numerical Modelling. Applied Sciences. 2021; 11(18):8440. https://doi.org/10.3390/app11188440
Chicago/Turabian StyleWang, Yanzhao, Guobin Xu, and Fang Liu. 2021. "Holding Force and Vertical Vibration of Emergency Gate in the Closing Process: Physical and Numerical Modelling" Applied Sciences 11, no. 18: 8440. https://doi.org/10.3390/app11188440