
Design Hybrid Iterative Learning Controller for Directly Driving the Wheels of Mobile Platform against Uncertain Parameters and Initial Errors



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- The discrete kinematics model does not conform to the actual physical model of the mobile robot. The gravity center may not wholly coincide with the midpoint of the driving wheels in the actual mobile robot. Therefore, the previous modeling methods and iterative learning controllers based on the gravity center are different from the actual model and control of the mobile platform.
- (2)
- The output variables of the iterative controller cannot directly control the motion of the mobile platform. The actual control variable of the mobile platform is the rotation speed of the driving wheels, whereas the output variables in these literatures are the forward speed and rotation speed of the mobile robot. The output variables produced by the above controllers need to be converted into the rotation speed of the driving wheels.
- (3)
- The solution speed may not meet the actual physical constraints of the motor. Since the selected control parameters are the mobile robot’s forward speed and rotation speed in these literatures, they cannot be effectively limited by the driving wheels. Therefore, the solution in the above-described studies cannot be converted into the actual rotation speed of two wheels considering the actual physical constraints.
- (4)
- The above-mentioned studies did not analyze the influence of the various parameters of the iterative controller on the trajectory tracking task of the mobile robot. These researchers only analyzed and verified the effectiveness of the designed controller, but did not study the influence of the controller parameters, such as the parameter uncertainty, speed limitation, structural parameter uncertainty, and initial error. It is necessary to conduct in-depth research so that the iterative controller can be more widely used in trajectory tracking.
2. Problem Formulation
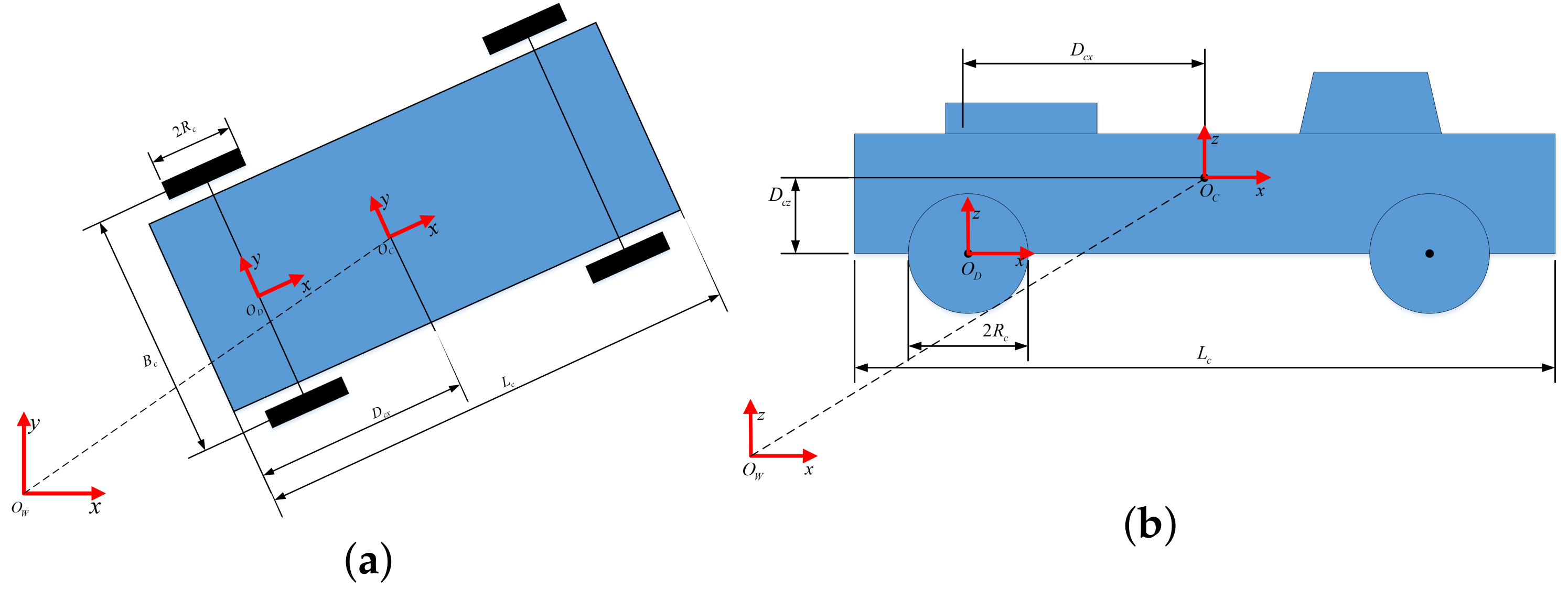
2.1. System Description
- (1)
- The world frame : Establish the system’s global coordinate system at a fixed position in the inertial coordinate system; it is used to describe the position and posture of the mobile robot.
- (2)
- The driving-fixed frame : Select the midpoint of the driving wheels as the origin of this local coordinate system, the x-axis direction is the same as the forward movement direction, the z-axis direction is the vertical direction of the movement plane, and the corresponding y-axis direction is established according to the right-hand rule direction.
- (3)
- The gravity-fixed frame : The origin of the gravity-fixed frame is established at the gravity center of the mobile platform, the x-axis direction is the same as the forward direction, the z-axis direction is the vertical direction of the movement plane, and the corresponding y-axis direction is established according to the right-hand rule direction.
- (1)
- Basic structure parameters: The length of the mobile platform is , the width of the mobile platform is , the radius of the wheels of the mobile platform is , and the distance from the midpoint of the driving wheels to the gravity center of the mobile platform is .
- (2)
- Vehicle positioning parameters: The initial position and initial posture of the midpoint of the driving wheels are .
2.2. Kinematic Model
2.2.1. Discrete kinematics Model of Mobile Platform
- (1)
- Ideal kinematics discrete model
- (2)
- Practical kinematics discrete model
2.2.2. State Equation of the Mobile Platform
- (1)
- Ideal state equation without disturbance
- (2)
- Practical state equation with disturbance
2.3. Actual Limitations
3. Design of the Controller
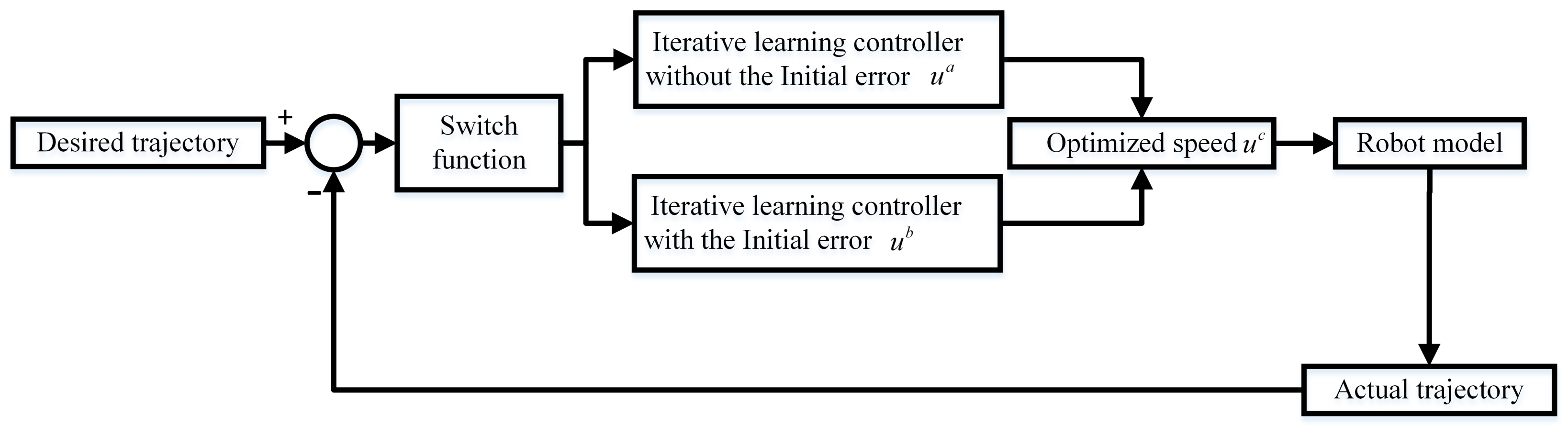
3.1. Design of the Hybrid Learning Iteration Controller for Mobile Platform
3.2. Theoretical Proof
4. Experimental Results
4.1. Basic Performance Test
4.1.1. Performance Test of the Hybrid Controller without Initial Error
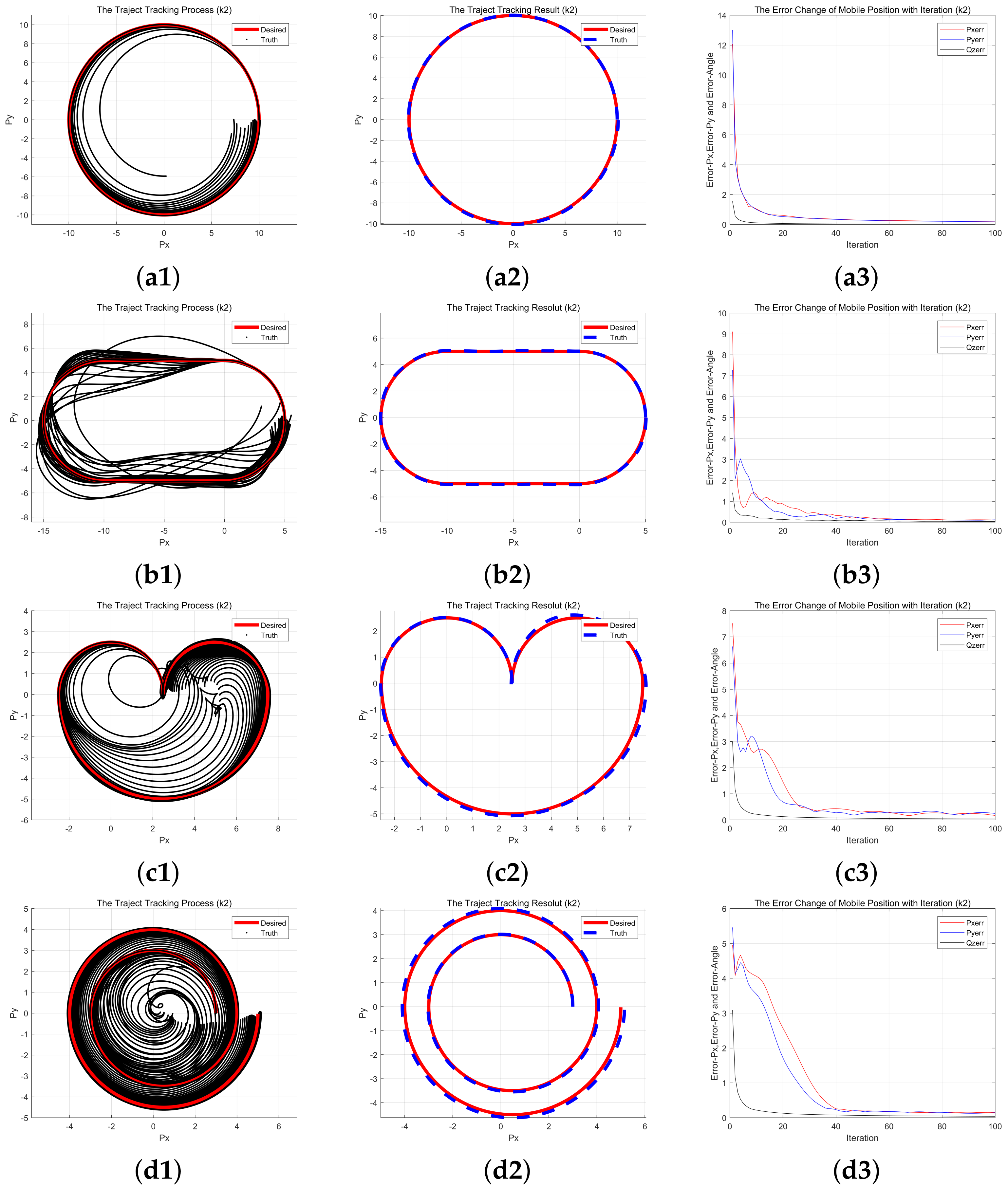
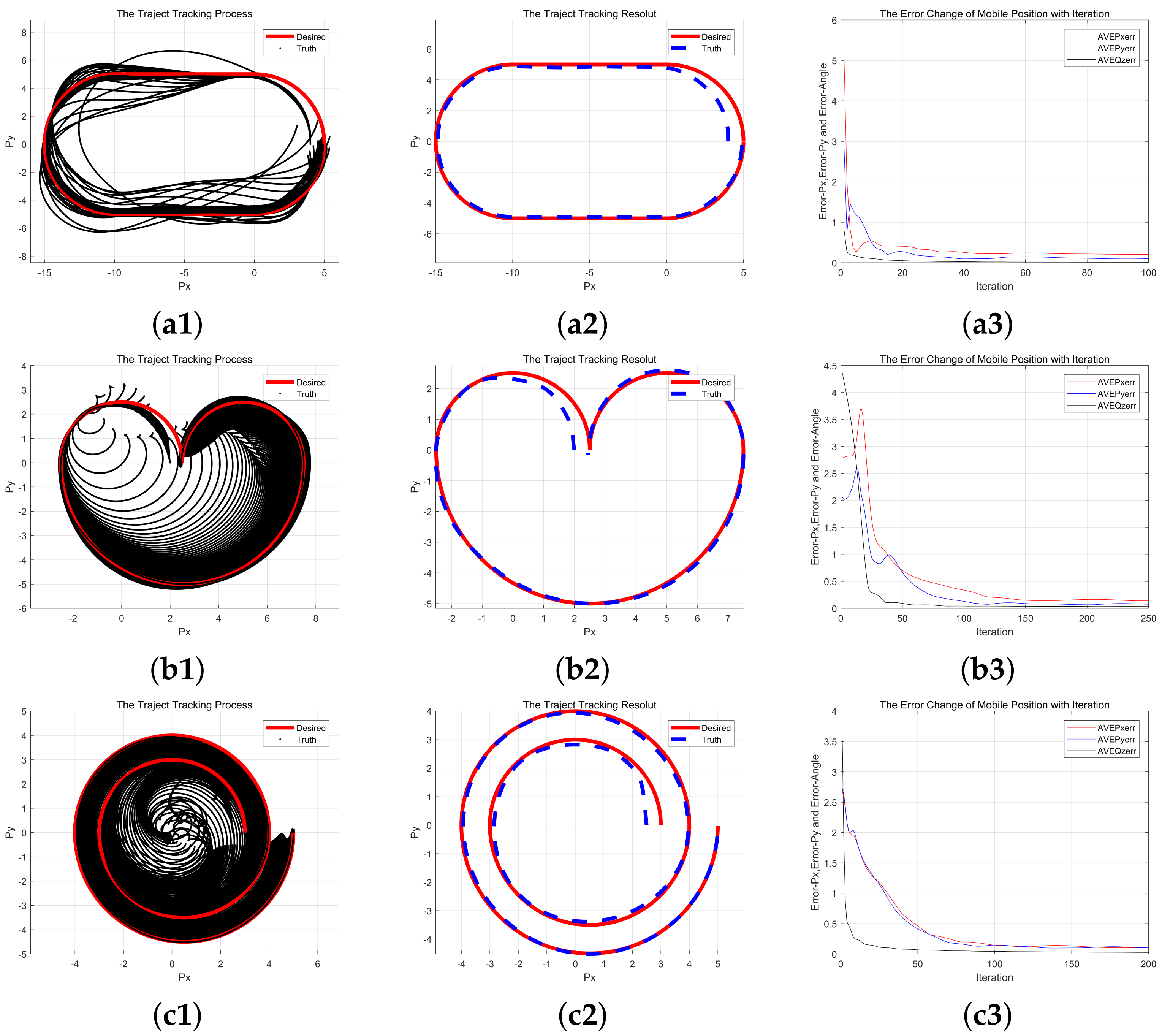
- (1)
- The system can directly control two driving wheels to track the specified trajectories without initial error using the iterative learning controller.
- (2)
- Selecting the midpoint of the two driving wheels as the control variable can effectively achieve different trajectory tracking tasks.
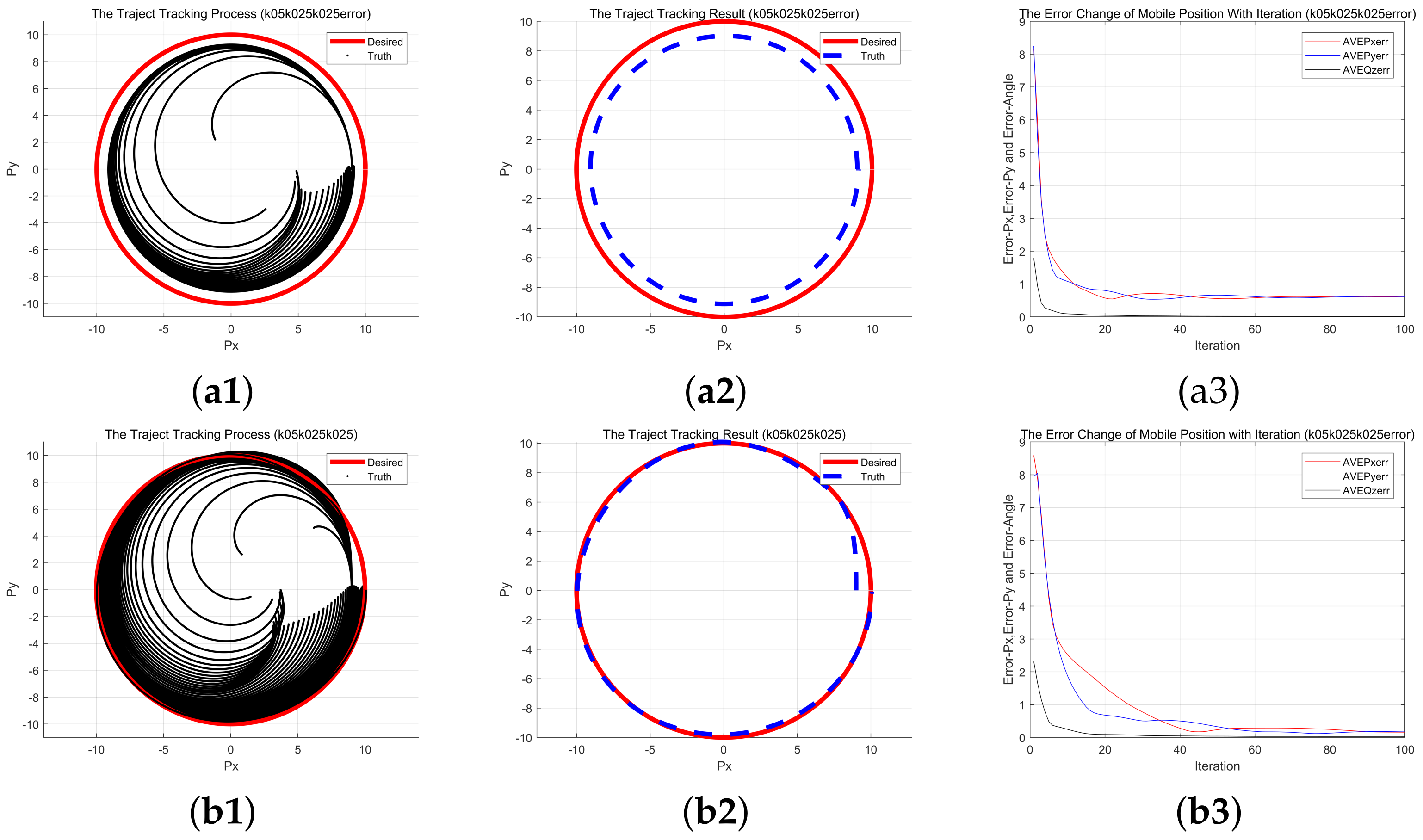
4.1.2. Performance Test of Hybrid Controller with Initial Error
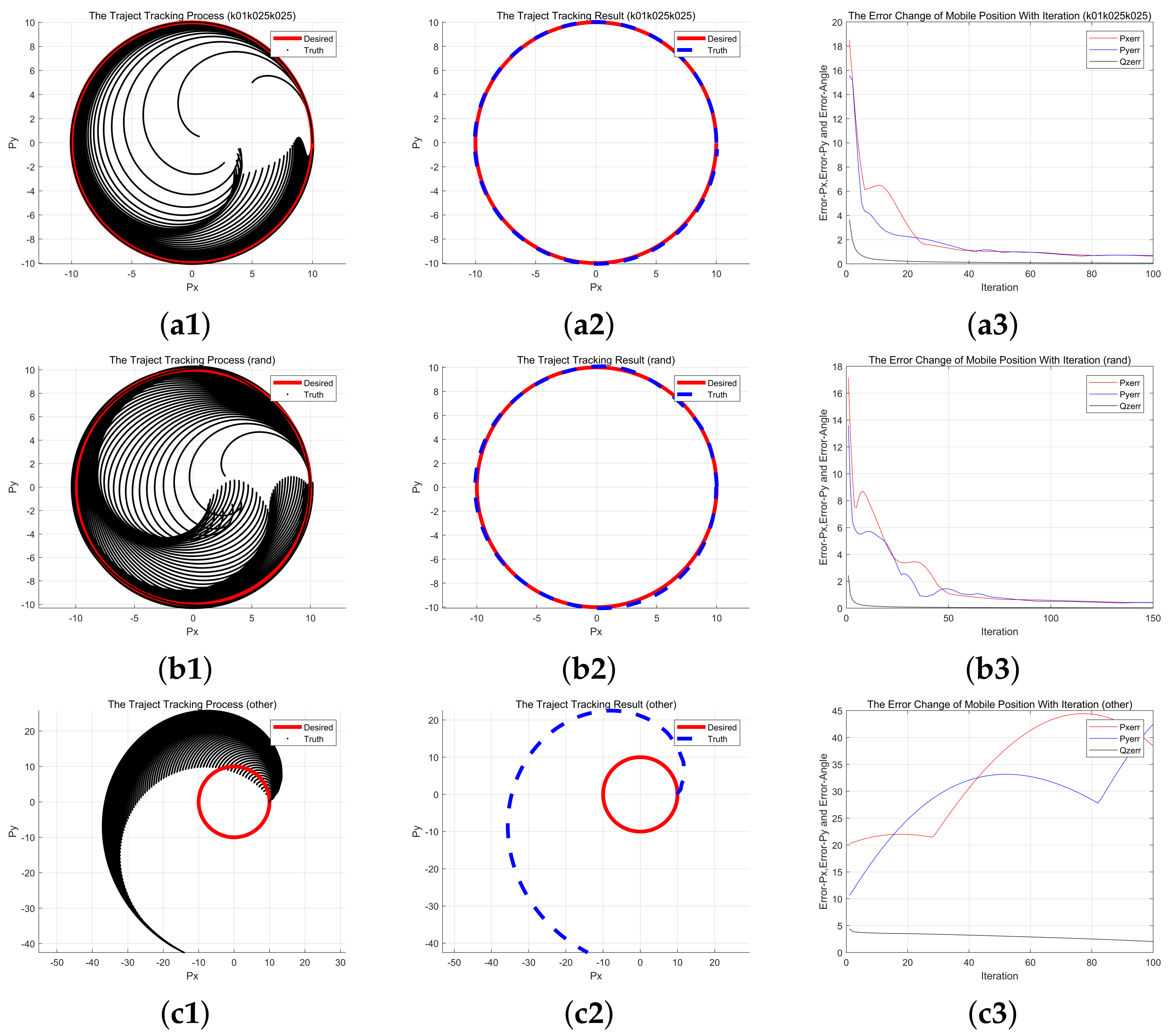
- (1)
- Without the initial error compensation in Figure 4a1–a3, the control law (17) can achieve closed-loop motion, but the actual trajectory has a relatively fixed deviation from the given trajectory. Therefore, the previous controller cannot control the tracking of the various trajectories with the initial error.
- (2)
- (3)
- According to various trajectory tracking results with initial error in Figure 5, the error compensation controller designed in this paper has good adaptability to various trajectories.
4.2. The Influence of Various Parameters
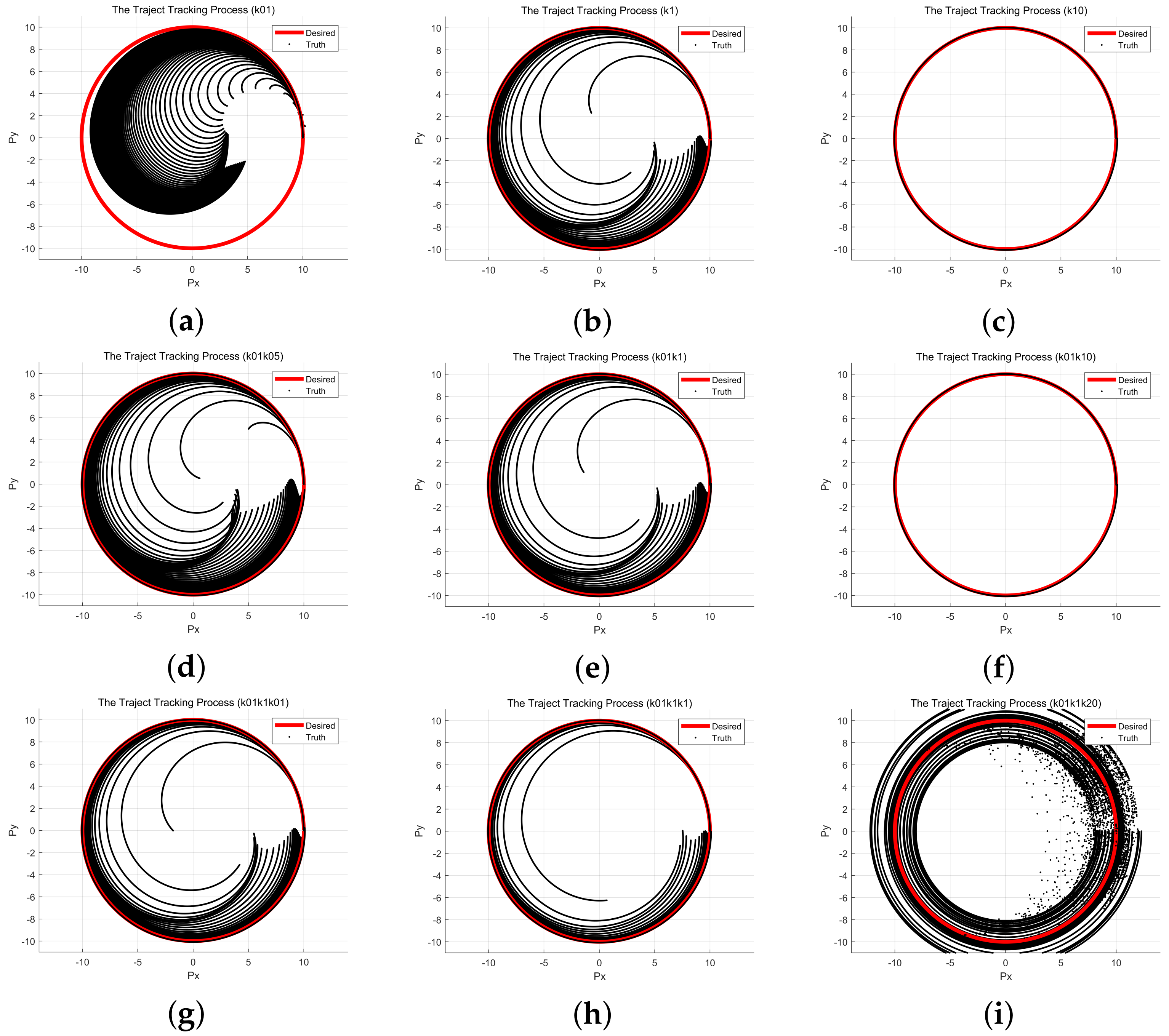
4.2.1. The Influence of the Control Coefficients and the Error Signals
4.2.2. The Influence of the Physical Speed Limitation
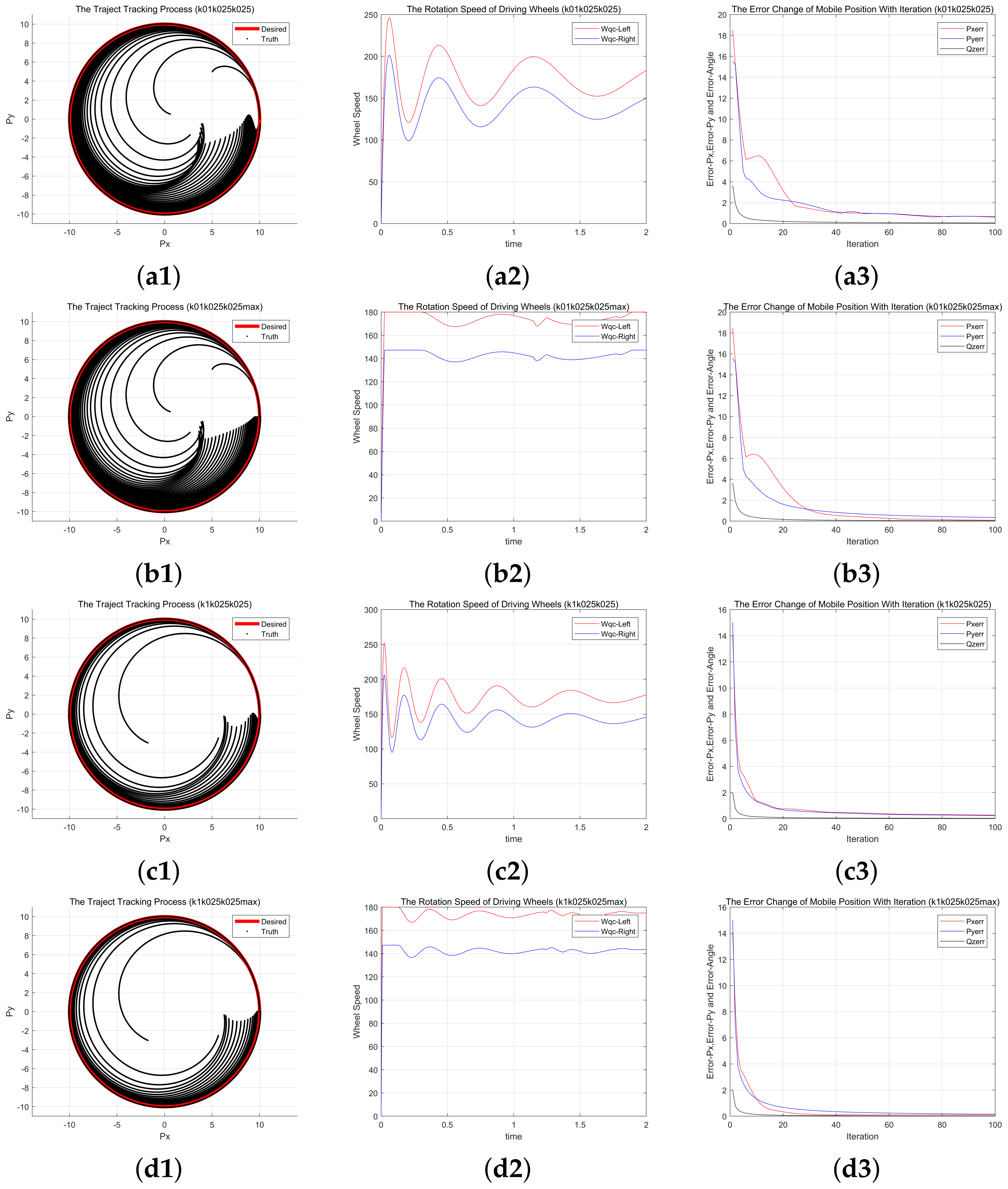
- (1)
- Comparing Figure 7a2,c2, the speed solved by the single controller does not meet the physical limitations; however, adding the speed constraint to the controller can meet the physical limitations of the mobile platform.
- (2)
- (3)
- Comparing Figure 7a2,a3,b2,b3 or Figure 7c2,c3,d2,d3, it can be found that the control signal is not smooth with the speed constraint since the control speed at the next moment can be reached considering the speed limitation. However, the velocity limitation can reduce the tracking error to significantly enhance the performance of the controller.

4.2.3. The Influence of Basic Structure Parameters
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, P.; Liang, Z.; Wang, X.; Zheng, M. Adaptive trajectory tracking of wheeled mobile robot based on fixed-time convergence with uncalibrated camera parameters. ISA Trans. 2020, 99, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Stančić, I.; Musić, J.; Grujić, T. Gesture recognition system for real-time mobile robot control based on inertial sensors and motion strings. Eng. Appl. Artif. Intell. 2017, 66, 33–48. [Google Scholar] [CrossRef]
- Zein, Y.; Darwiche, M.; Mokhiamar, O. GPS tracking system for autonomous vehicles. Alexandria Eng. J. 2018, 57, 3127–3137. [Google Scholar] [CrossRef]
- Chan, R.P.M.; Stol, K.A.; Halkyard, C.R. Review of modelling and control of two-wheeled robots. Annu. Rev. Control. 2013, 37, 89–103. [Google Scholar] [CrossRef]
- Luo, S.; Wu, S.; Liu, Z.; Guan, H. Wheeled Mobile Robot RBFNN Dynamic Surface Control Based on Disturbance Observer. ISRN Appl. Math. 2014, 2014, 634936. [Google Scholar] [CrossRef] [Green Version]
- Scaglia, G.; Rosales, A.; Quintero, L.; Mut, V.; Agarwal, R. A linear-interpolation-based controller design for trajectory tracking of mobile robots. Control Eng. Pract. 2010, 18, 318–329. [Google Scholar] [CrossRef]
- Shojaei, K.; Shahri, A.M.; Tarakameh, A. Adaptive feedback linearizing control of nonholonomic wheeled mobile robots in presence of parametric and nonparametric uncertainties. Robot. Comput. Integr. Manuf. 2011, 27, 194–204. [Google Scholar] [CrossRef]
- Wu, D.; Cheng, Y.; Du, H.; Zhu, W.; Zhu, M. Finite-time output feedback tracking control for a nonholonomic wheeled mobile robot. Aerosp. Sci. Technol. 2018, 78, 574–579. [Google Scholar] [CrossRef]
- Alakshendra, V.; Chiddarwar, S.S. Adaptive robust control of Mecanum-wheeled mobile robot with uncertainties. Nonlinear Dyn. 2017, 87, 2147–2169. [Google Scholar] [CrossRef]
- Begnini, M.; Bertol, D.W.; Martins, N.A. A robust adaptive fuzzy variable structure tracking control for the wheeled mobile robot: Simulation and experimental results. Control Eng. Pract. 2017, 64, 27–43. [Google Scholar] [CrossRef]
- Fierro, R.; Lewis, F.L. Control of a nonholonomic mobile robot: Backstepping kinematics into dynamics. J. Robot. Syst. 1997, 14, 149–163. [Google Scholar] [CrossRef]
- He, N.; Qi, L.; Li, R.; Liu, Y. Design of a Model Predictive Trajectory Tracking Controller for Mobile Robot Based on the Event-Triggering Mechanism. Math. Probl. Eng. 2021, 2021, 5573467. [Google Scholar] [CrossRef]
- Liu, K.; Gong, J.; Chen, S.; Zhang, Y.; Chen, H. Model predictive stabilization control of high-speed autonomous ground vehicles considering the effect of road topography. Appl. Sci. 2018, 8, 5. [Google Scholar] [CrossRef] [Green Version]
- Matraji, I.; Al-Durra, A.; Haryono, A.; Al-Wahedi, K.; Abou-Khousa, M. Trajectory tracking control of Skid-Steered Mobile Robot based on adaptive Second Order Sliding Mode Control. Control Eng. Pract. 2017, 11, 167–176. [Google Scholar] [CrossRef]
- Goswami, N.K.; Padhy, P.K. Sliding mode controller design for trajectory tracking of a non-holonomic mobile robot with disturbance. Comput. Electr. Eng. 2018, 72, 307–323. [Google Scholar] [CrossRef]
- Aouf, A.; Boussaid, L.; Sakly, A. TLBO-Based Adaptive Neurofuzzy Controller for Mobile Robot Navigation in a Strange Environment. Comput. Intell. Neurosci. 2018, 2018, 3145436. [Google Scholar] [CrossRef] [PubMed]
- Omrane, H.; Masmoudi, M.S.; Masmoudi, M. Fuzzy Logic Based Control for Autonomous Mobile Robot Navigation. Comput. Intell. Neurosci. 2016, 2016, 9548482. [Google Scholar] [CrossRef] [Green Version]
- Dixon, W.E.; Dawson, D.M.; Zergeroglu, E.; Behal, A. Adaptive tracking control of a wheeled mobile robot via an uncalibrated camera system. IEEE Trans. Syst. Man, Cybern. Part B Cybern. 2001, 31, 341–352. [Google Scholar] [CrossRef] [Green Version]
- Xin, L.; Wang, Q.; She, J.; Li, Y. Robust adaptive tracking control of wheeled mobile robot. Rob. Auton. Syst. 2016, 78, 36–48. [Google Scholar] [CrossRef]
- Cui, M.; Sun, D.; Liu, W.; Zhao, M.; Liao, X. Adaptive tracking and obstacle avoidance control for mobile robots with unknown sliding. Int. J. Adv. Robot. Syst. 2012, 9, 1–14. [Google Scholar] [CrossRef]
- Hoang, N.B.; Kang, H.J. Neural network-based adaptive tracking control of mobile robots in the presence of wheel slip and external disturbance force. Neurocomputing 2016, 188, 12–22. [Google Scholar] [CrossRef]
- Li, S.; Ding, L.; Gao, H.; Chen, C.; Liu, Z.; Deng, Z. Adaptive neural network tracking control-based reinforcement learning for wheeled mobile robots with skidding and slipping. Neurocomputing 2018, 283, 20–30. [Google Scholar] [CrossRef]
- Boukens, M.; Boukabou, A.; Chadli, M. Robust adaptive neural network-based trajectory tracking control approach for nonholonomic electrically driven mobile robots. Rob. Auton. Syst. 2017, 92, 30–40. [Google Scholar] [CrossRef]
- Boudjedir, C.E.; Bouri, M.; Boukhetala, D. Iterative learning control for trajectory tracking of a parallel Delta robot. At-Automatisierungstechnik 2019, 67, 145–156. [Google Scholar] [CrossRef]
- Dong, J.; He, B.; Zhang, C.; Li, G. Open-Closed-Loop PD Iterative Learning Control with a Variable Forgetting Factor for a Two-Wheeled Self-Balancing Mobile Robot. Complexity 2019, 2019, 5705126. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Fei, J. Velocity Tracking Control of Wheeled Mobile Robots by Iterative Learning Control. Int. J. Adv. Robot. Syst. 2016, 13, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Son, T.D.; Ahn, H.S.; Moore, K.L. Iterative learning control in optimal tracking problems with specified data points. Automatica 2013, 49, 1465–1472. [Google Scholar] [CrossRef]
- Li, G. Adaptive iterative learning control for nonlinear systems with unknown control direction. Nanjing Li Gong Daxue Xuebao/J. Nanjing Univ. Sci. Technol. 2015, 39, 2942–2950. [Google Scholar] [CrossRef]
- Bouakrif, F.; Zasadzinski, M. High order iterative learning control to solve the trajectory tracking problem for robot manipulators using Lyapunov theory. Trans. Inst. Meas. Control 2018, 40, 4105–4114. [Google Scholar] [CrossRef]
- Bouakrif, F.; Boukhetala, D.; Boudjema, F. Velocity observer-based iterative learning control for robot manipulators. Int. J. Syst. Sci. 2013, 44, 214–222. [Google Scholar] [CrossRef]
- Ahn, H.S.; Chen, Y.Q.; Moore, K.L. Iterative learning control: Brief survey and categorization. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1099–1121. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, F.; Doyle, F.J. Survey on iterative learning control, repetitive control, and run-to-run control. J. Process Control 2009, 19, 1589–1600. [Google Scholar] [CrossRef]
- Kang, M.K.; Lee, J.S.; Han, K.L. Kinematic path tracking of mobile robot using iterative learning control. J. Robot. Syst. 2005, 22, 111–121. [Google Scholar] [CrossRef]
- Han, K.L.; Lee, J.S. Iterative path tracking of an omni-directional mobile robot. Adv. Robot. 2011, 25, 1817–1838. [Google Scholar] [CrossRef]
- Yu, C.; Chen, X. Trajectory tracking of wheeled mobile robot by adopting iterative learning control with predictive, current, and past learning items. Robotica 2015, 33, 1393–1414. [Google Scholar] [CrossRef]
- Wang, H.; Dong, J.; Wang, Y. Discrete PID-Type Iterative Learning Control for Mobile Robot. J. Control Sci. Eng. 2016, 2016, 2320746. [Google Scholar] [CrossRef]
- Wang, H.; Dong, J.; Wang, Y. Research on Open-Closed-Loop Iterative Learning Control with Variable Forgetting Factor of Mobile Robots. Discret. Dyn. Nat. Soc. 2016, 2016, 6452179. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Zhou, F.; Li, Y.; Wang, Y. A novel iterative learning path-tracking control for nonholonomic mobile robots against initial shifts. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef] [Green Version]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, L.; Xiao, L.; Luo, Q.; Li, M.; Jiang, J. Design Hybrid Iterative Learning Controller for Directly Driving the Wheels of Mobile Platform against Uncertain Parameters and Initial Errors. Appl. Sci. 2021, 11, 8181. https://doi.org/10.3390/app11178181
Qiao L, Xiao L, Luo Q, Li M, Jiang J. Design Hybrid Iterative Learning Controller for Directly Driving the Wheels of Mobile Platform against Uncertain Parameters and Initial Errors. Applied Sciences. 2021; 11(17):8181. https://doi.org/10.3390/app11178181
Chicago/Turabian StyleQiao, Lijun, Luo Xiao, Qingsheng Luo, Minghao Li, and Jianfeng Jiang. 2021. "Design Hybrid Iterative Learning Controller for Directly Driving the Wheels of Mobile Platform against Uncertain Parameters and Initial Errors" Applied Sciences 11, no. 17: 8181. https://doi.org/10.3390/app11178181