
Path Planning and Collision Avoidance in Unknown Environments for USVs Based on an Improved D* Lite


Abstract
:1. Introduction
2. D* Lite
2.1. Introduction of D* Lite
2.2. Disadvantages of D* Lite
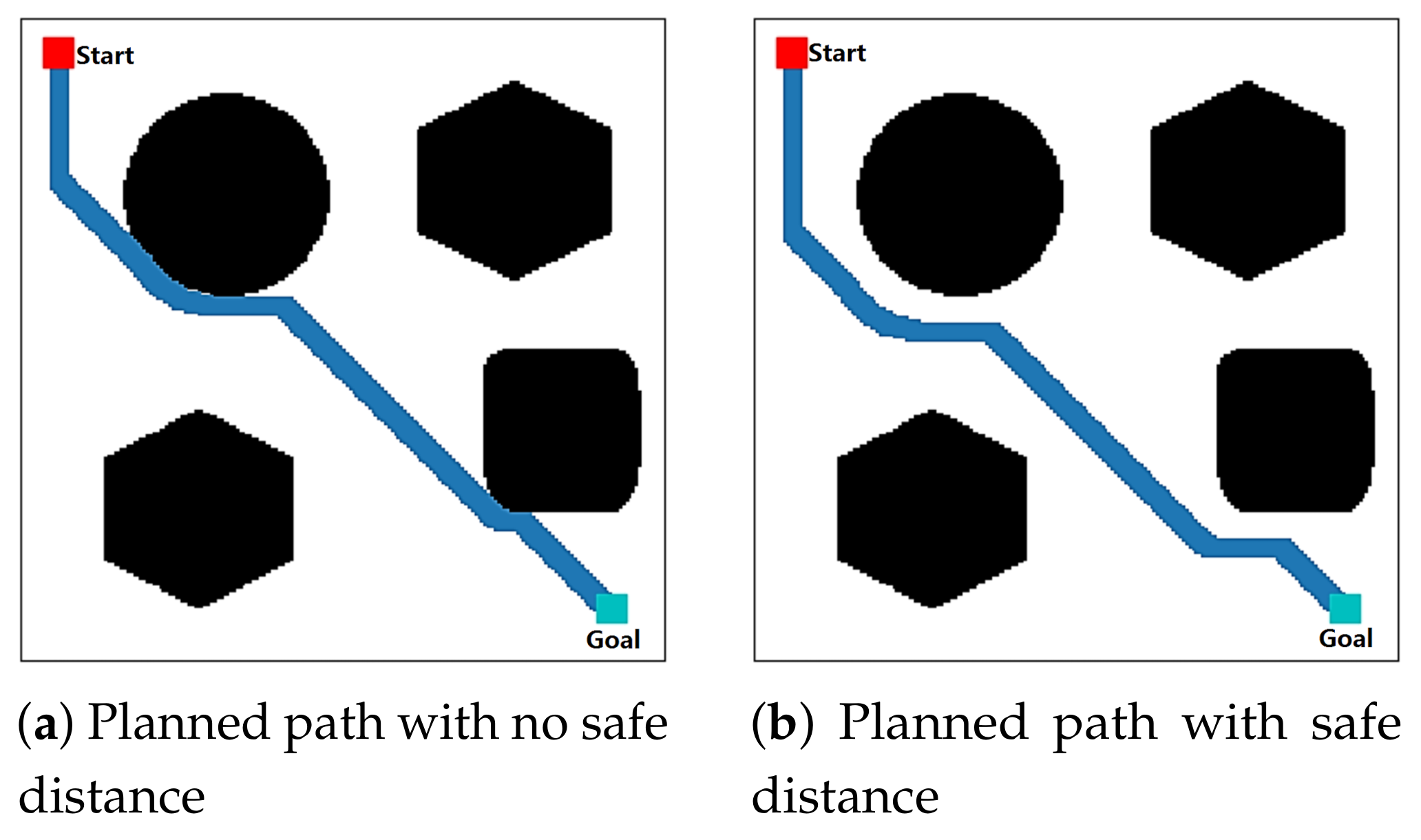
- The path planned by D* Lite is close to obstacles, which is unrealistic and risky for USVs.
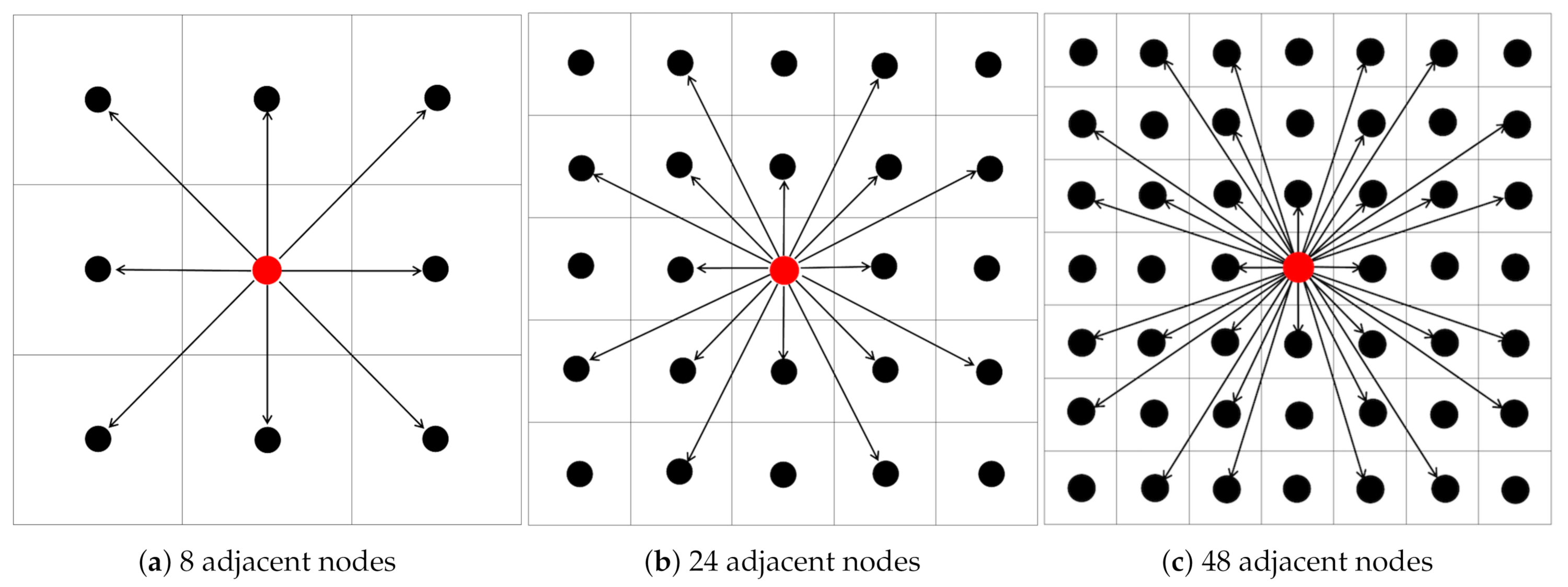
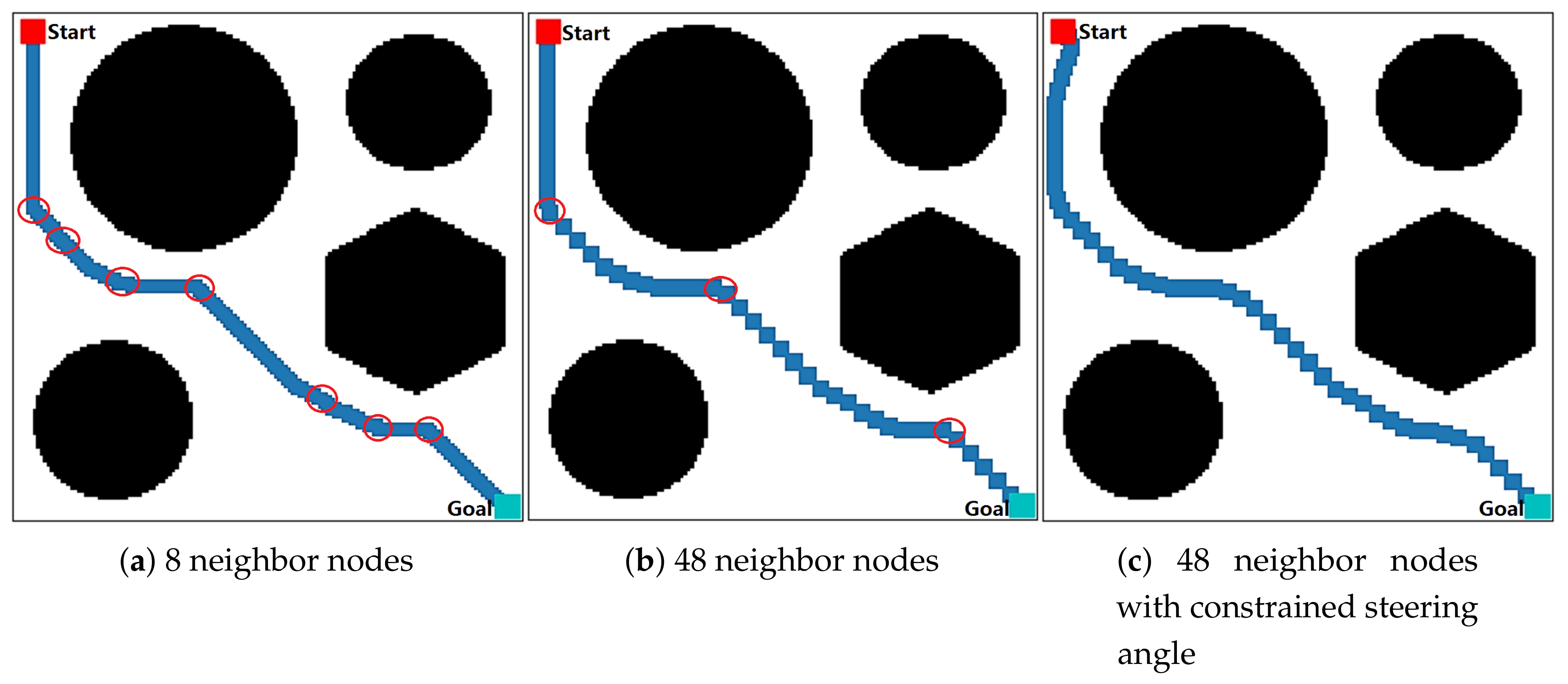
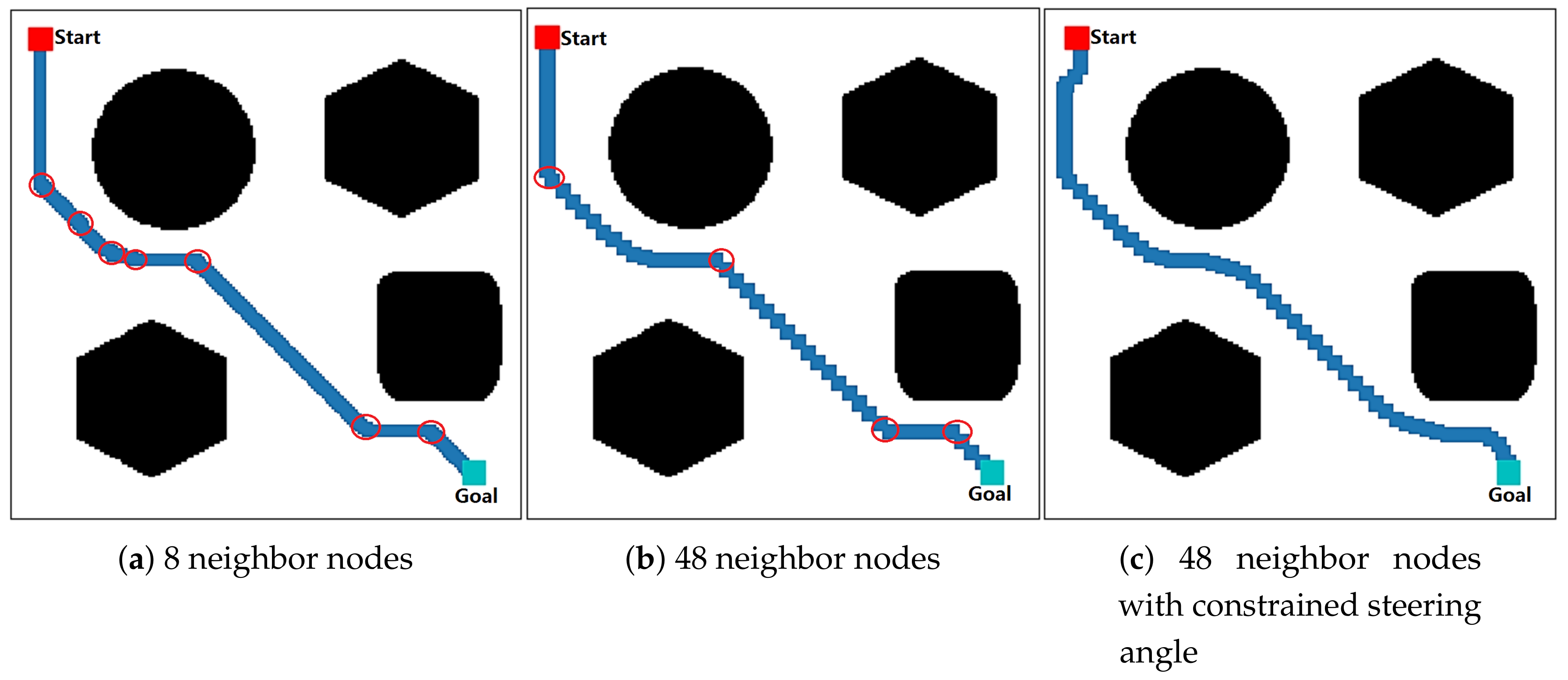
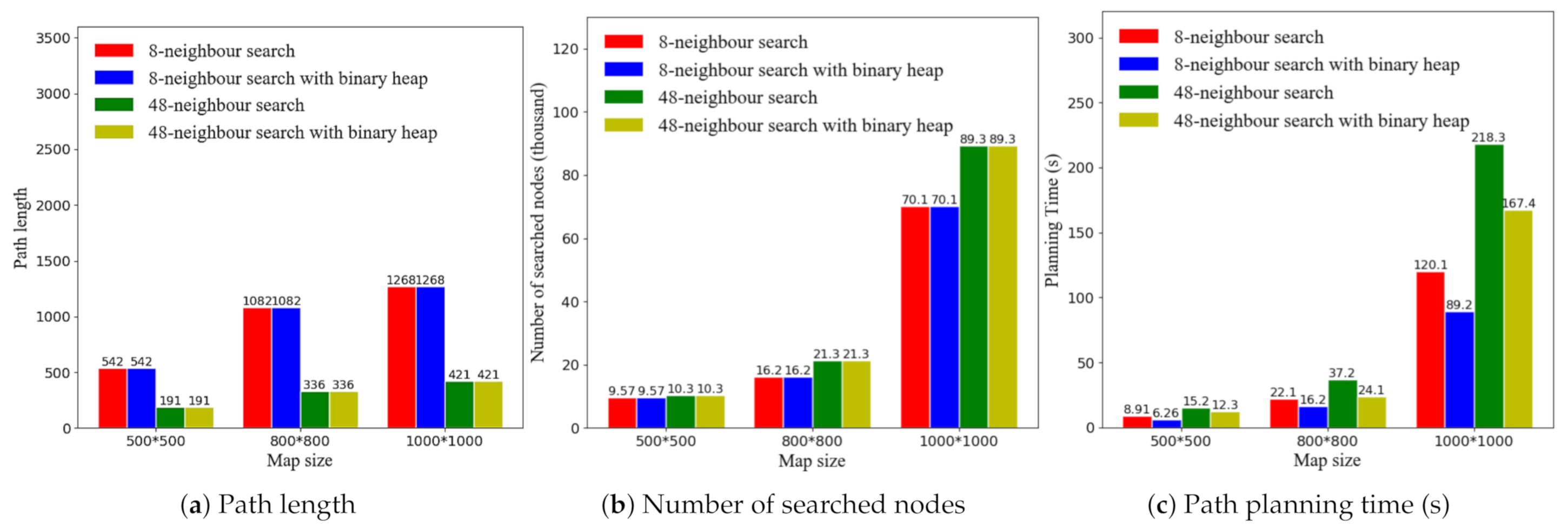
- D* Lite usually searches eight adjacent nodes for expansion. This means that the steering angle of USVs should be integral multiples of 45 degrees, which may be too much for a real USV to turn each time due to its limited steering maneuverability. We can increase the number of adjacent nodes to decrease the steering angle. However, this will significantly increase the search time for path planning. Thus, we should comprehensively consider the balance between the steering maneuverability of USVs and the path planning efficiency.
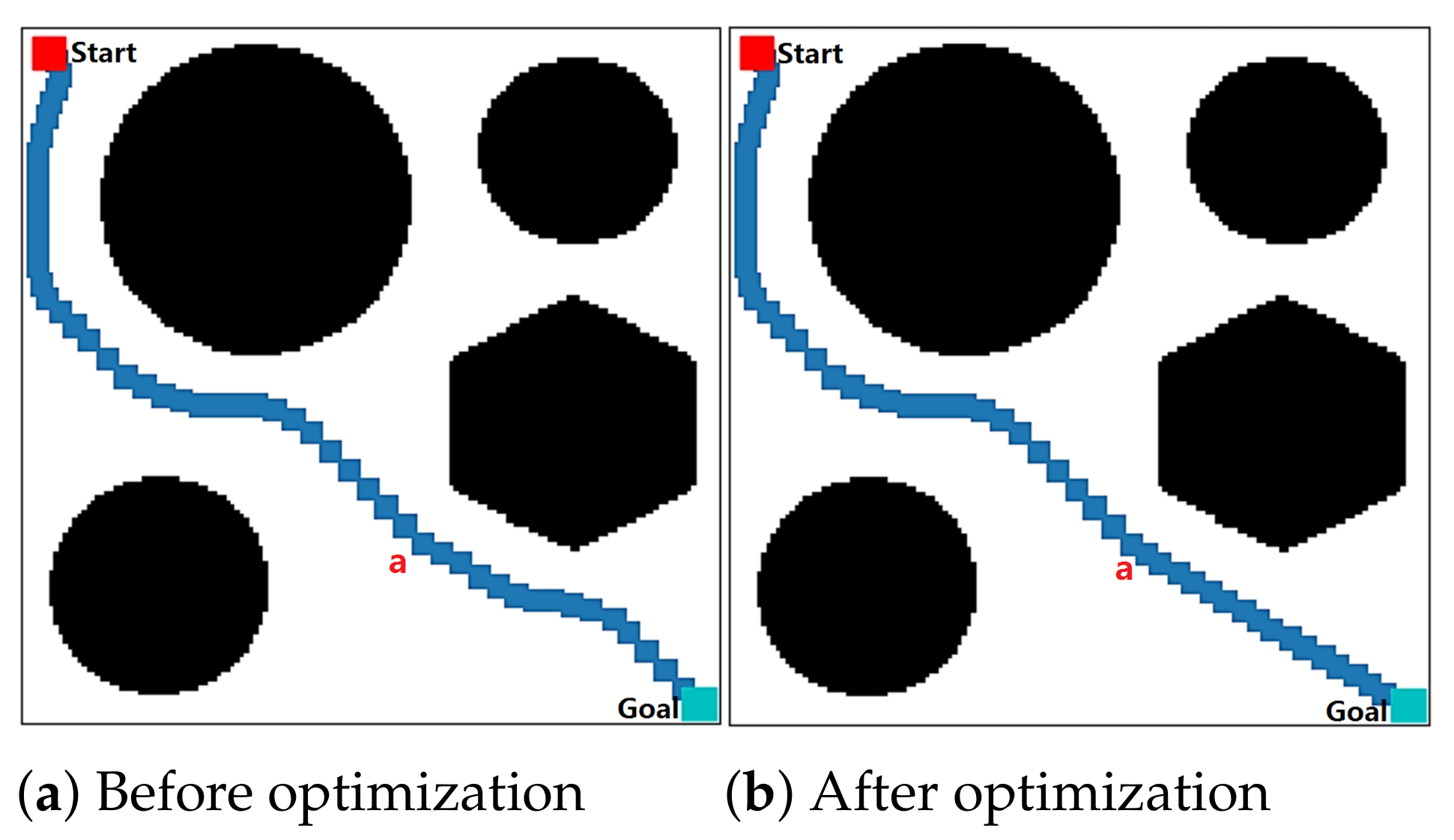
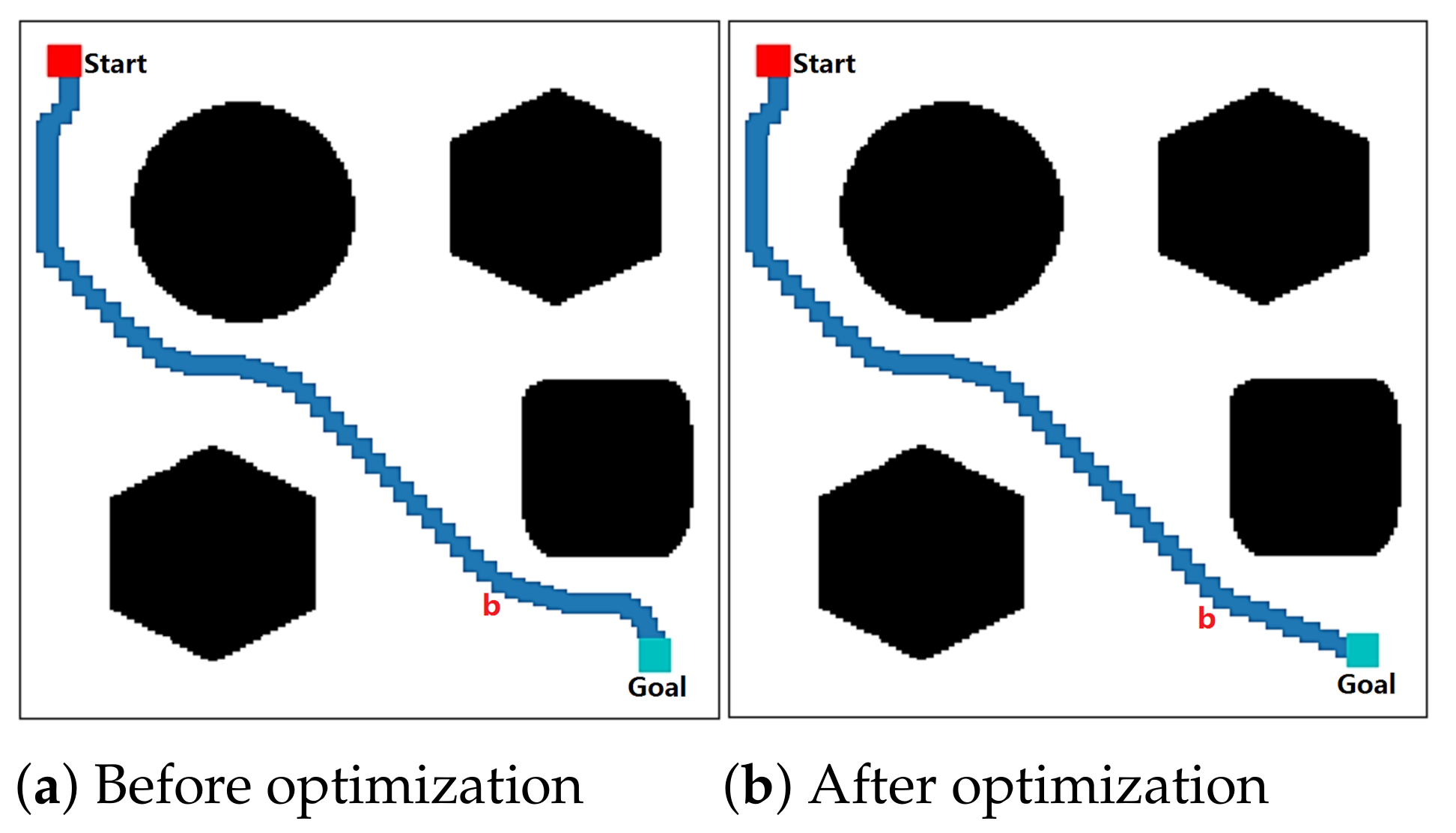
- D* Lite searches reversely from the goal node to the start node for path planning. This strategy is beneficial for replanning in dynamic environments. However, the planned path may have sharp turns [28], which increases the path length and results in a suboptimal path.
- D* Lite plans path between two nodes (the start and goal nodes). USVs may need to reach several specific positions during autonomous navigation. This means that it is necessary to achieve multi-goal path planning for USVs.
- D* Lite spends much computing time on the comparison of the key values of nodes in the priority queue U as well as push in and out operations on the priority queue. Each time, when we select a node from the priority queue U to expand, the key values of all nodes in the priority queue should be traversed and sorted, which is a time-consuming operation, and its time complexity is . When we plan a path within a large environment map with thousands of grids, the number of nodes in the priority queue for expanding is also increased, which can significantly decrease the search efficiency.
3. Improved D* Lite
3.1. Setting Safe Distance
| Algorithm 1. Set safe distance. |
|
3.2. Adjacent Node Expansion and Steering Angle Limitation
3.2.1. Adjacent Node Expansion
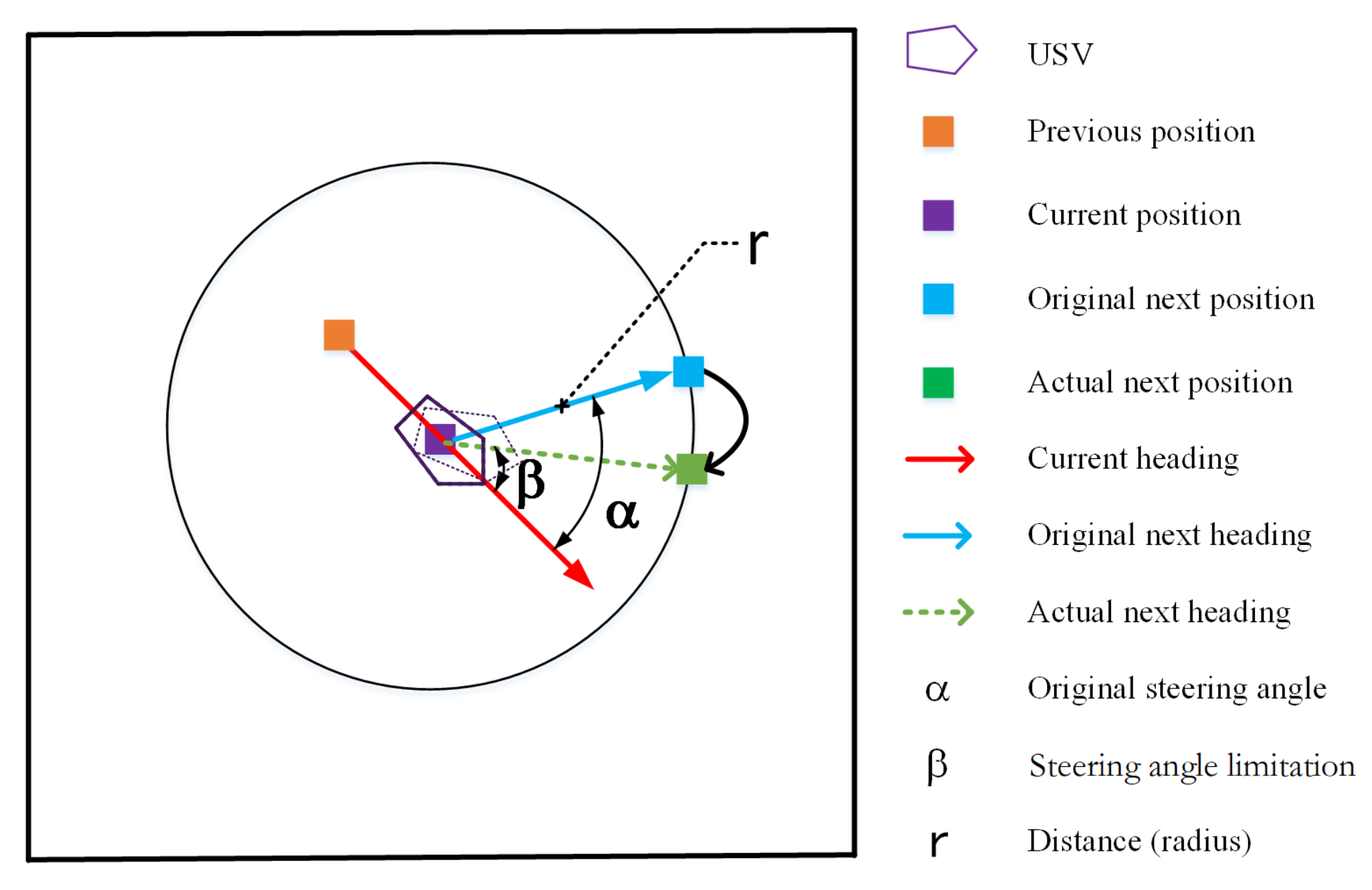
3.2.2. Steering Angle Limitation
- (1)
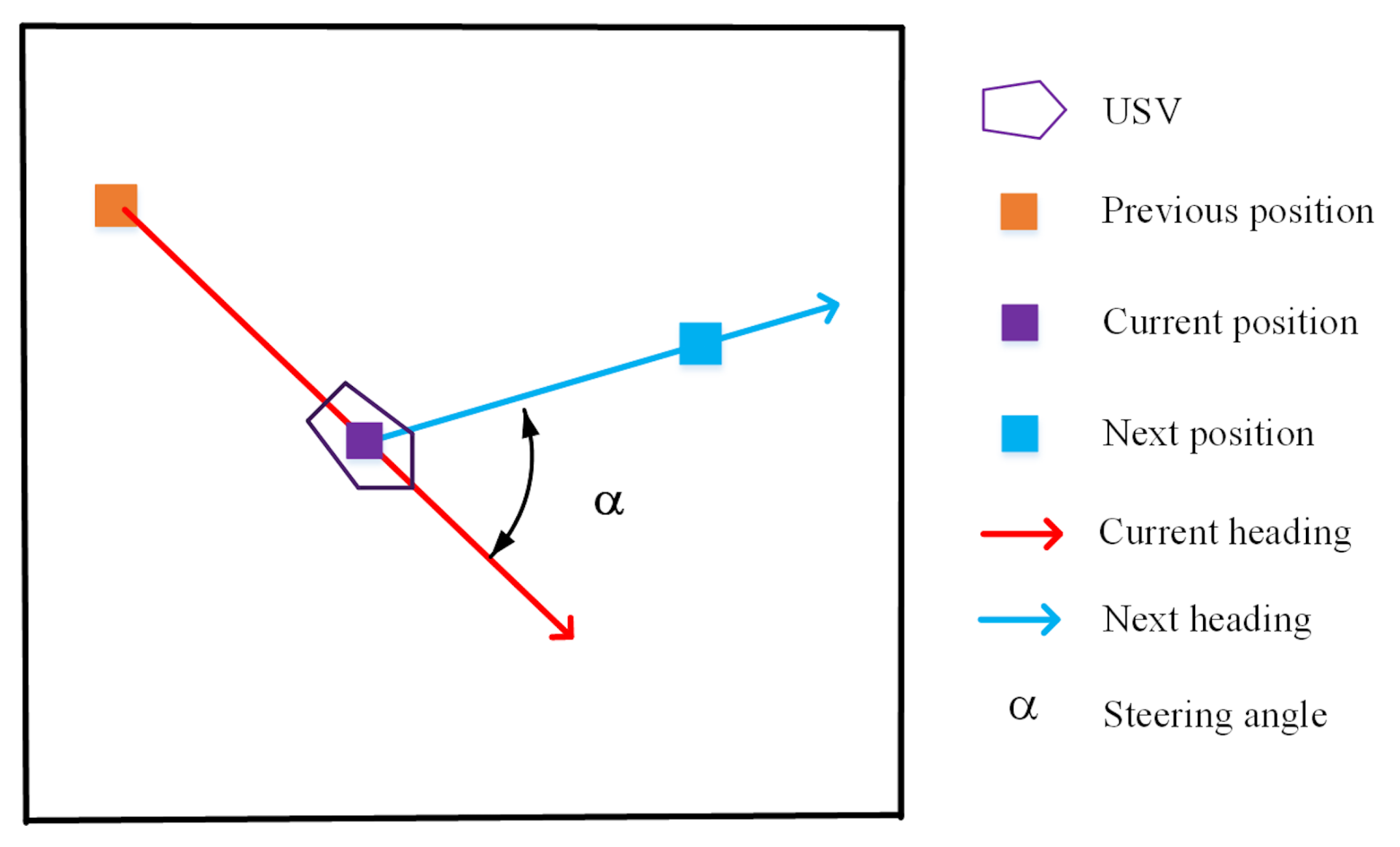
- USV heading: the vector from the previous position to the current position of the USV. Initially, the USV heading is towards the goal position.
- (2)
- Steering angle: assume that the vector from the previous position to the current position is , and the vector from the current position to the next position is . We define the steering angle as the angle between and , which is shown in Figure 2.
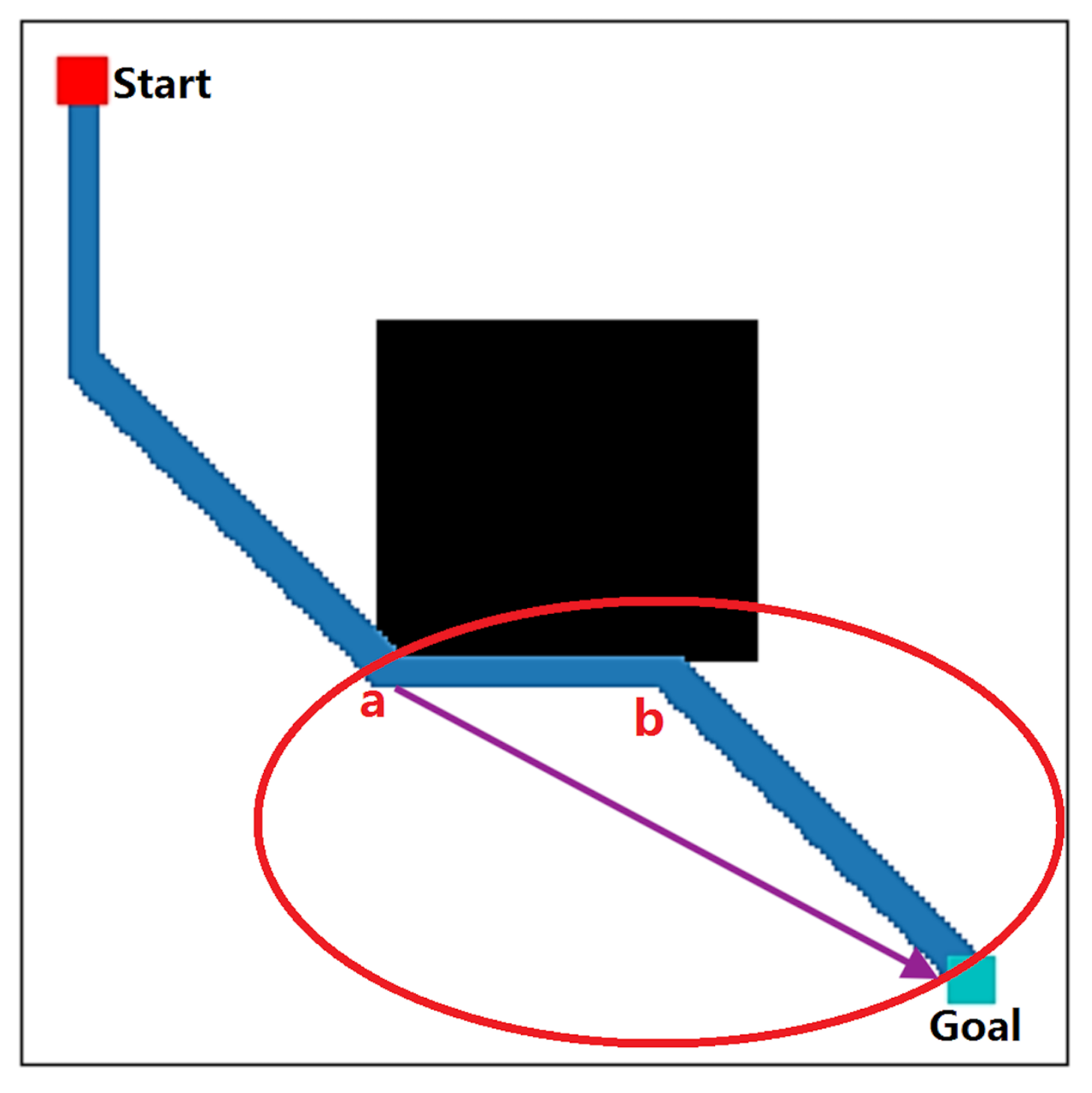
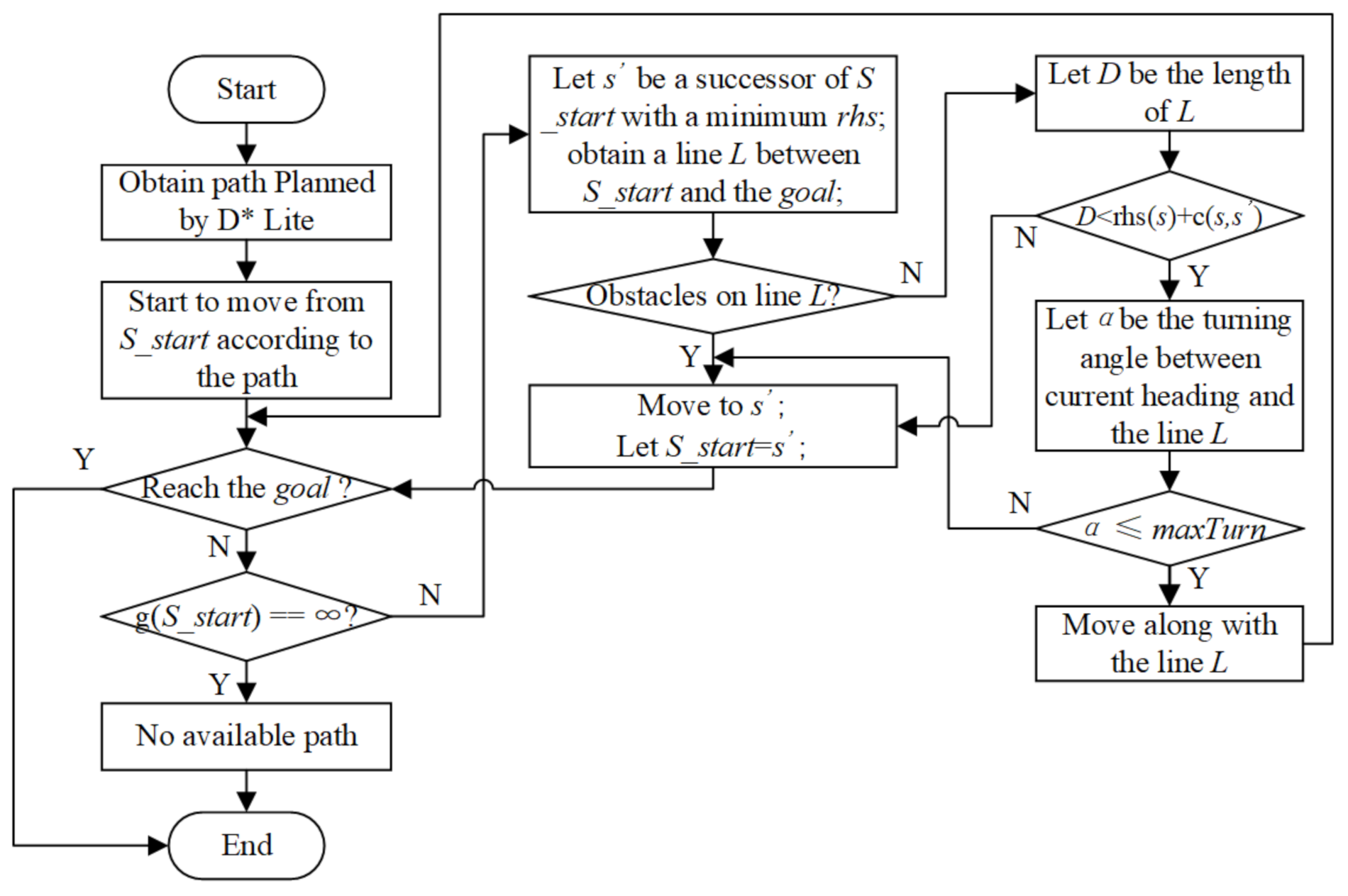
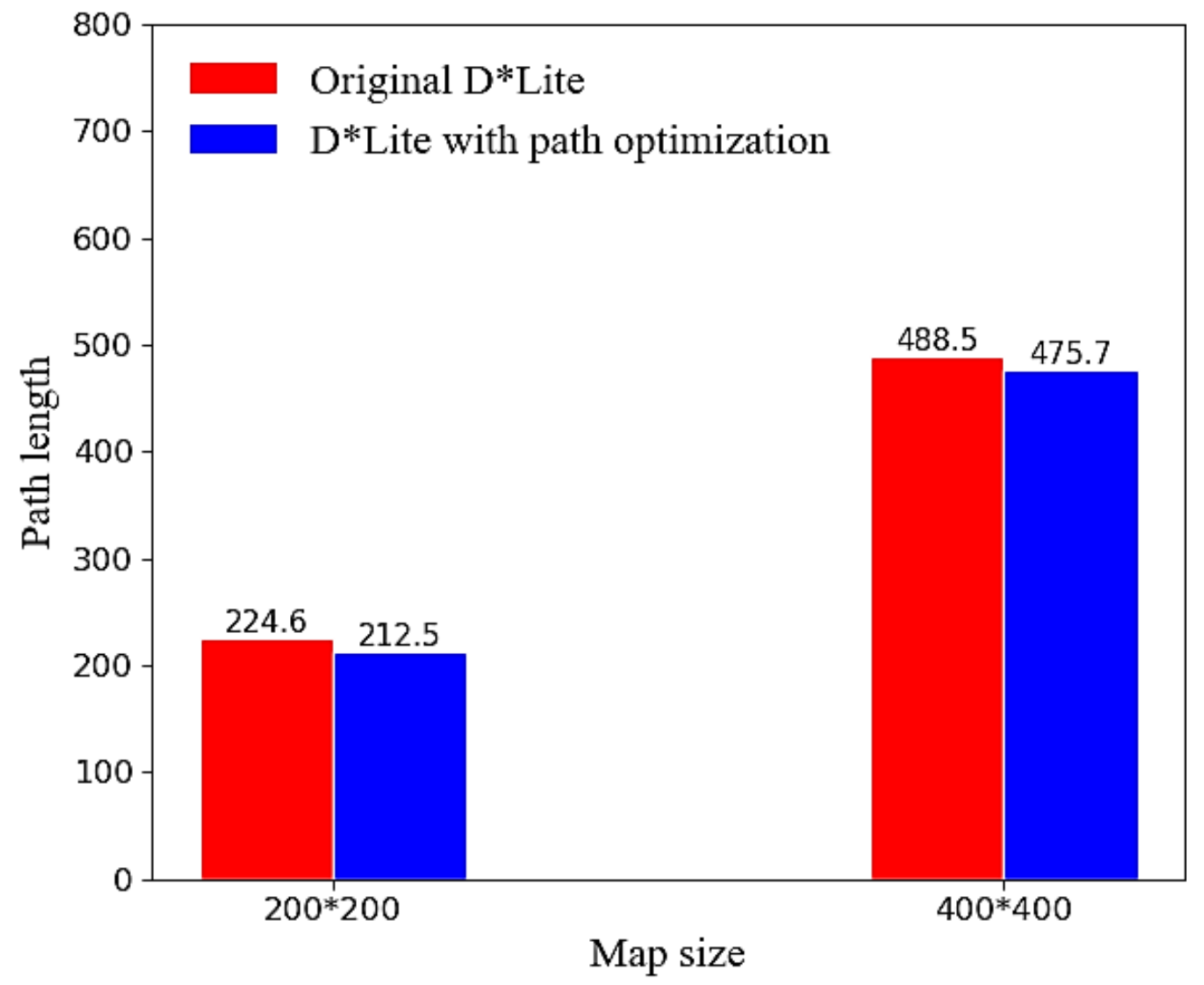
3.3. Path Optimization
- 1.
- Plan the path using D* Lite.
- 2.
- Start to move from the start node to the goal node .
- 3.
- Set the current node as s and calculate the value of its all the successor nodes. Let node represent the node with the smallest value of the successor nodes.
- 4.
- Set a line L from node s to the goal node .
- 5.
- If there is no obstacle along line L,
- (a)
- Let D be the length of L.
- (b)
- If , move to node ; go to step (3).
- (c)
- Otherwise, if , move to node ; go to step (3). Otherwise, move from node s to the goal node directly.
- 6.
- Otherwise, if there is an obstacle along line L,
- (a)
- Move to node .
- (b)
- Go to step (3).
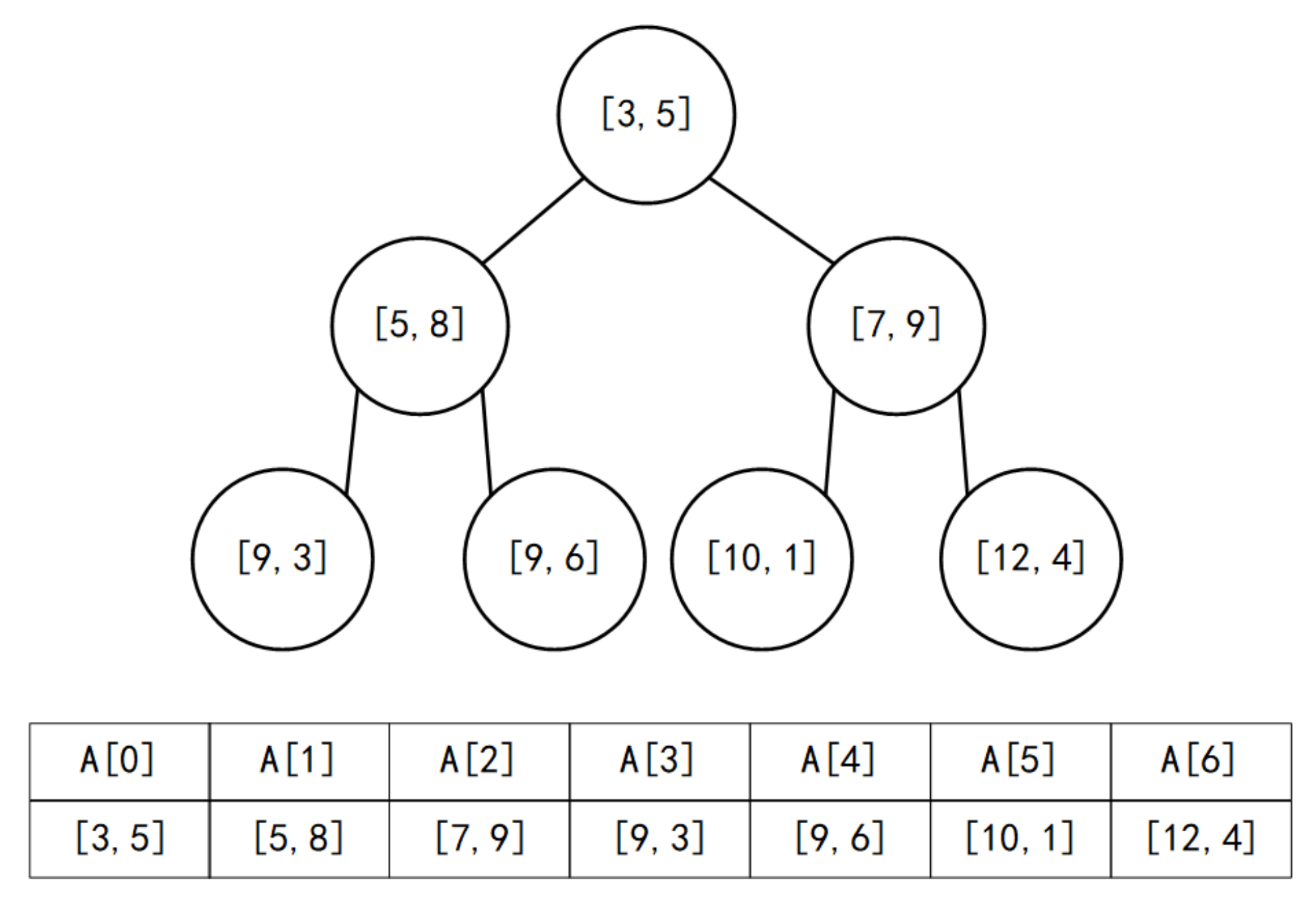
3.4. Optimization of Priority Queue
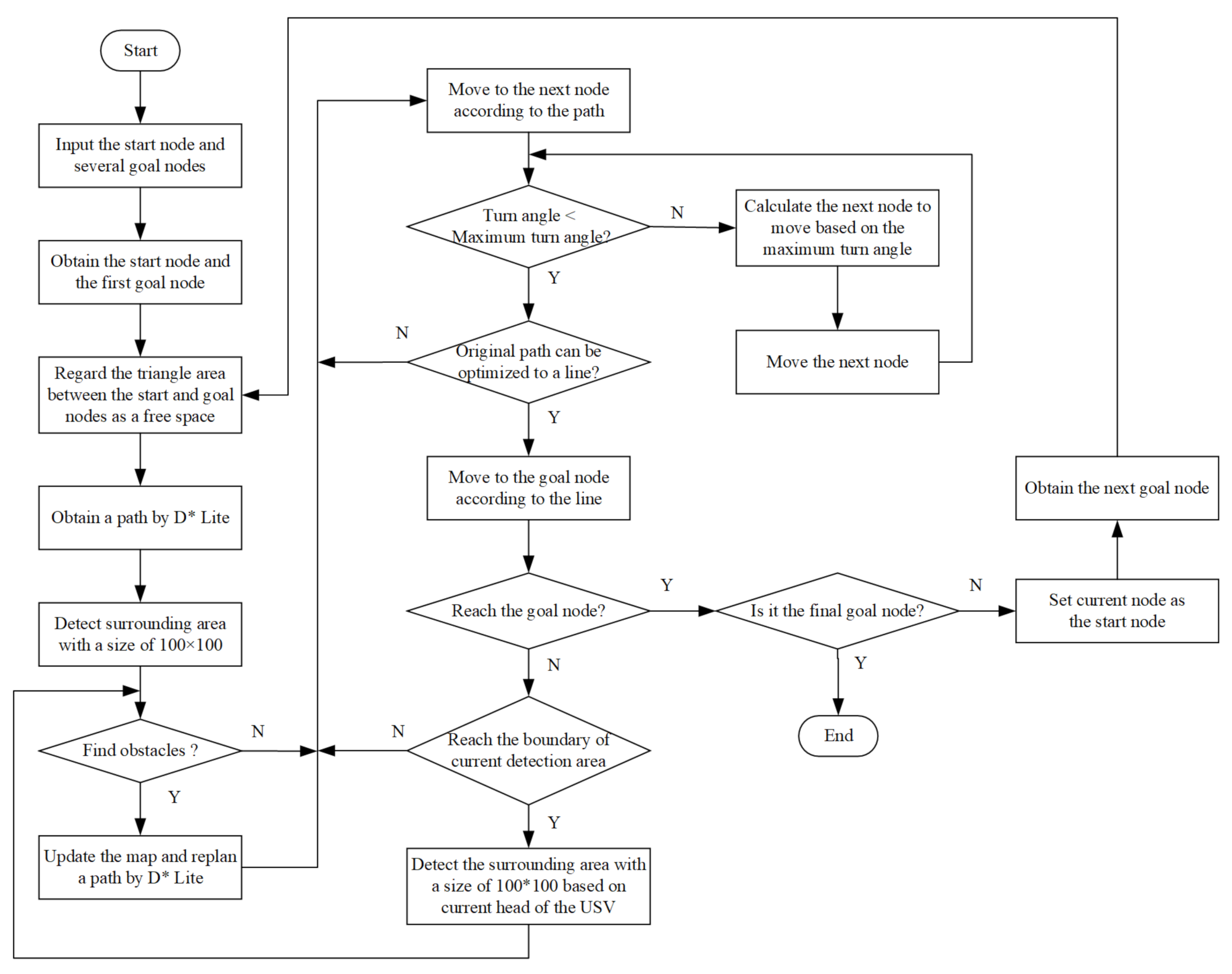
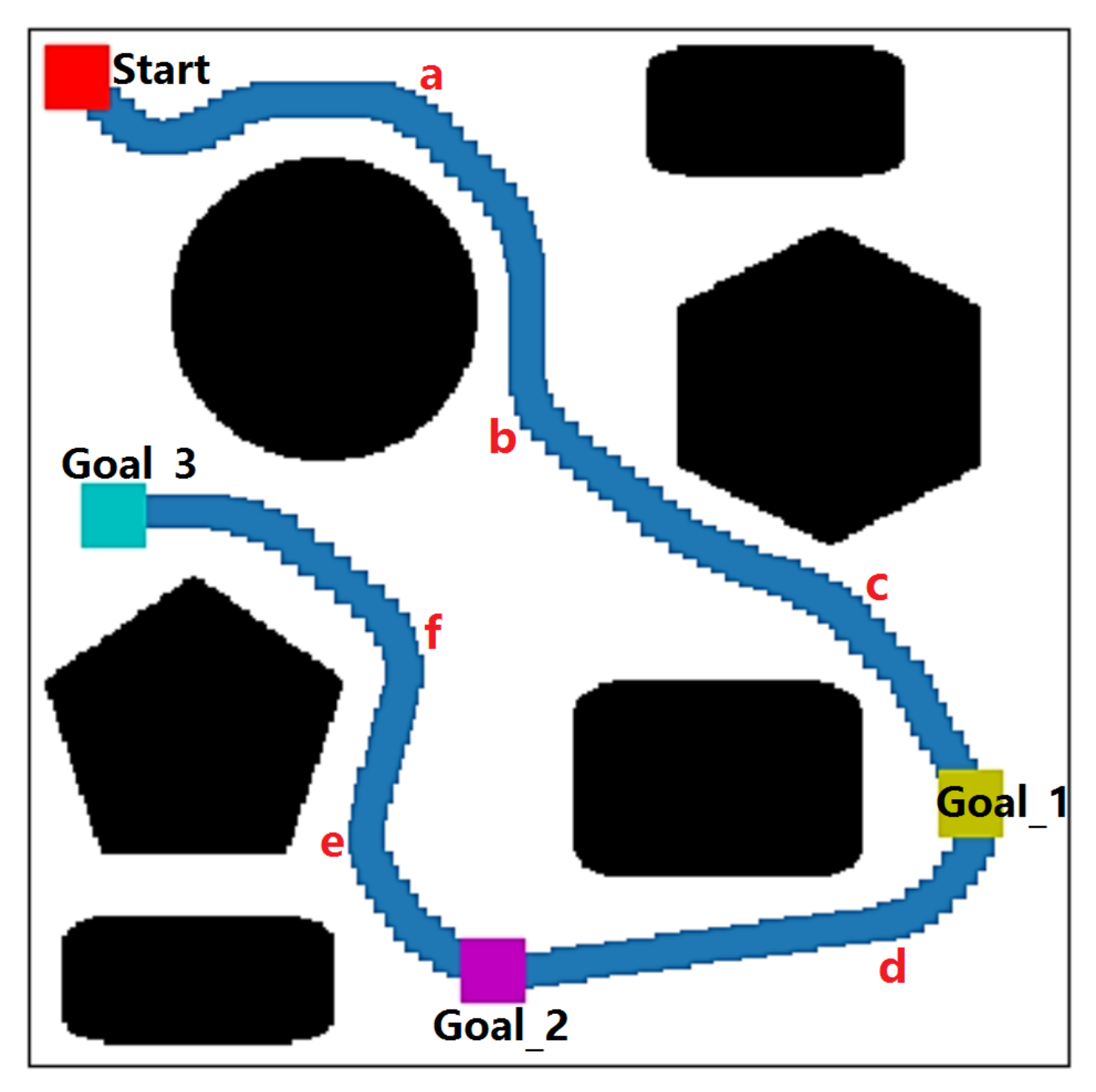
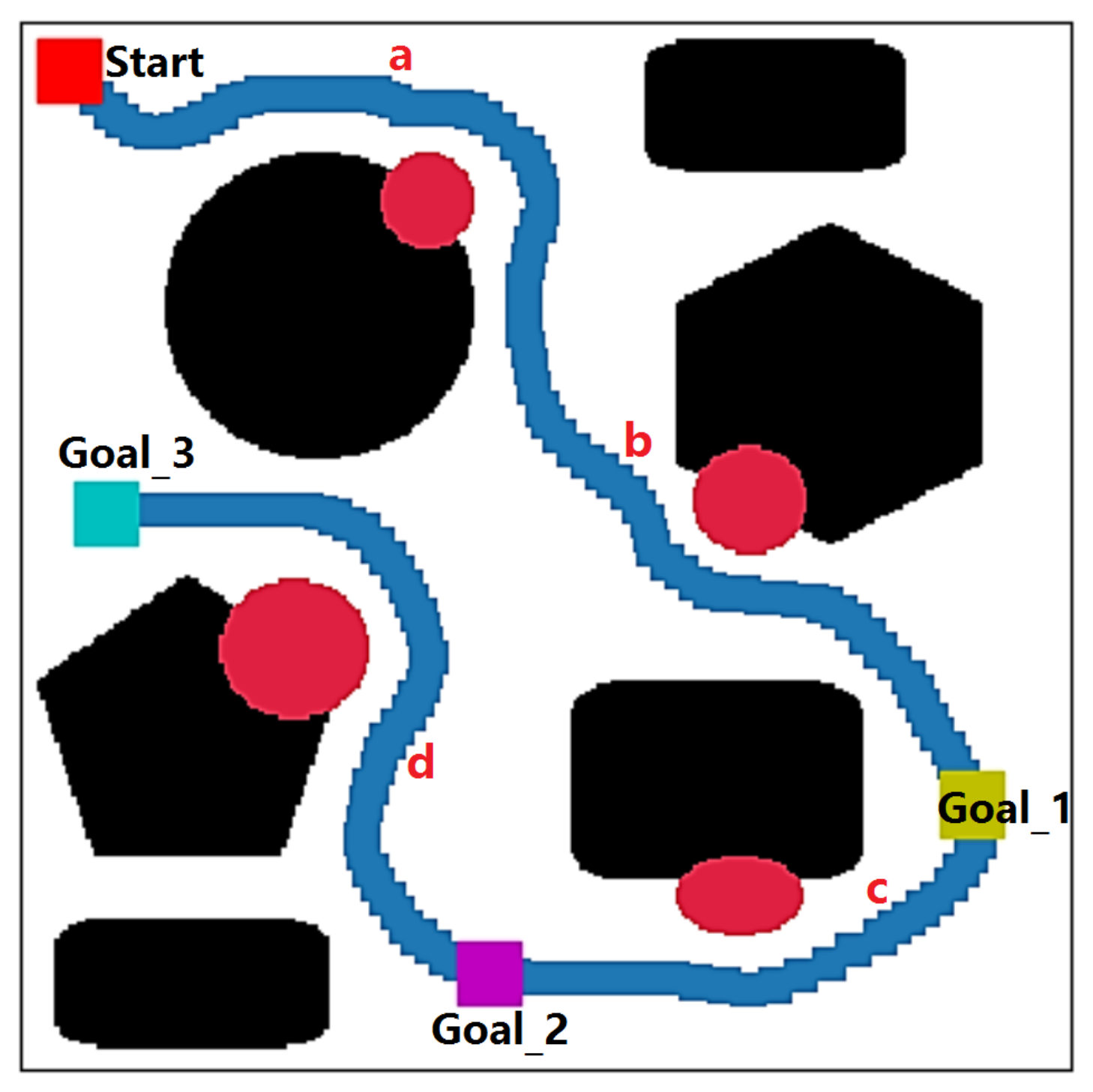
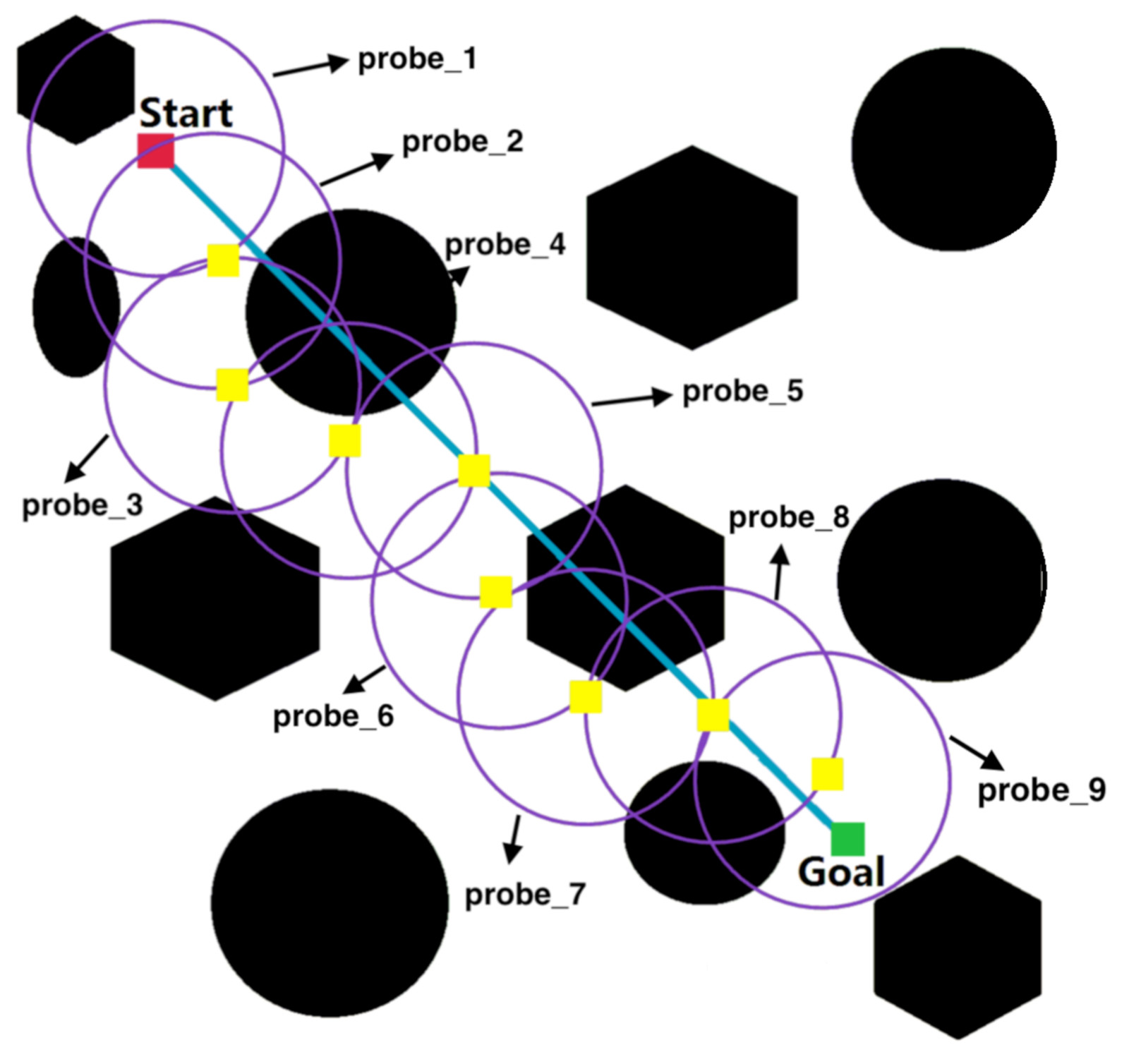
3.5. Multi-Goal Path Planning in Unknown Environment
- 1.
- Initialize the start and goal nodes. Assume that the whole region from the start node to the goal node is a free space (i.e., no obstacles). Then, plan a path from the goal node to the start node with D* Lite.
- 2.
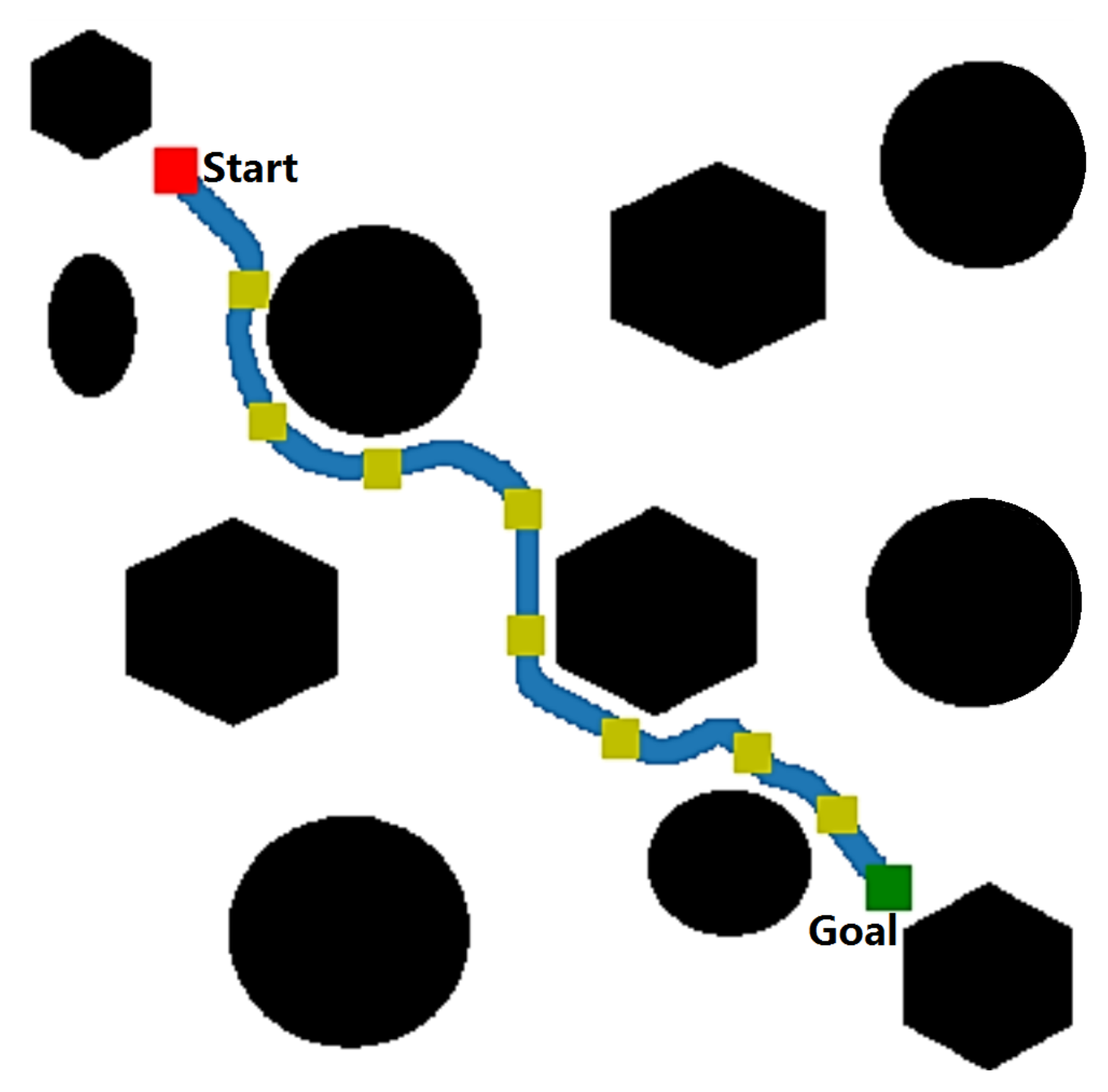
- The USV detects environmental information with its sensors, starting from the current node, and verifies whether the goal node is within the detected area. If so, the USV proceeds to the goal node according to the path planned with D* Lite and the path planning procedure is finished. Otherwise, go to step (3).
- 3.
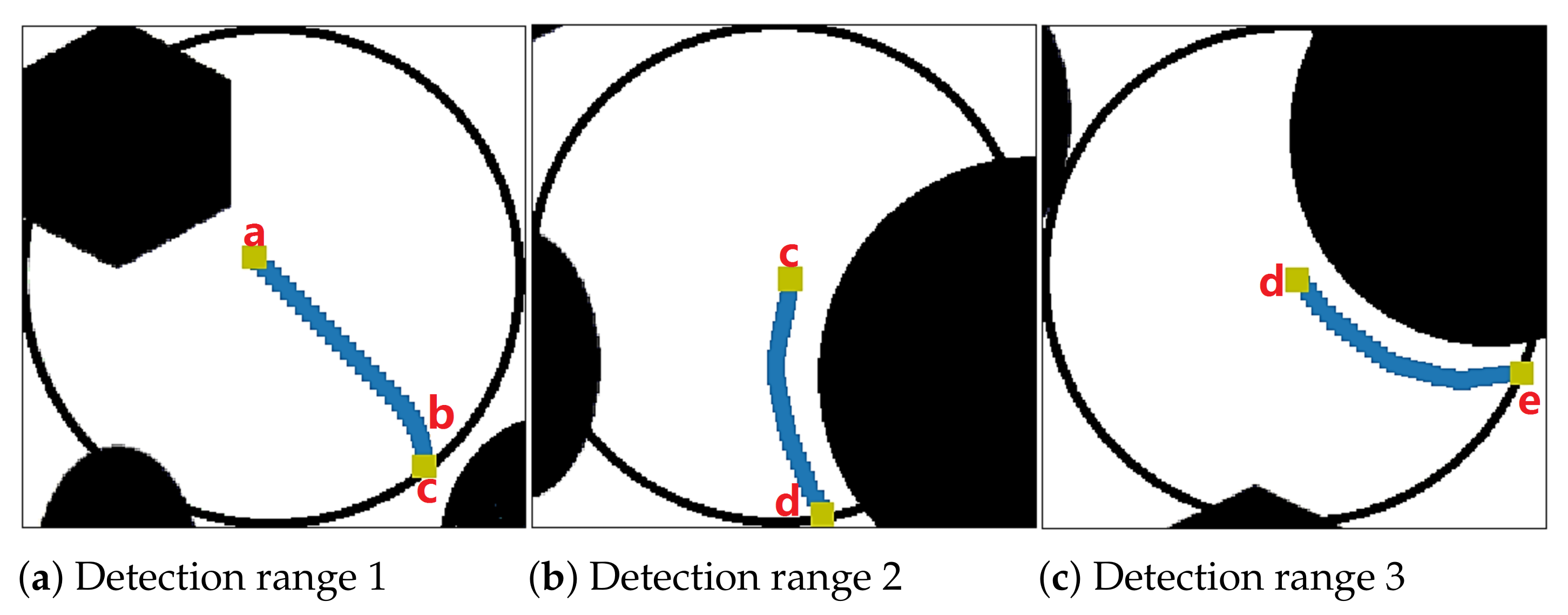
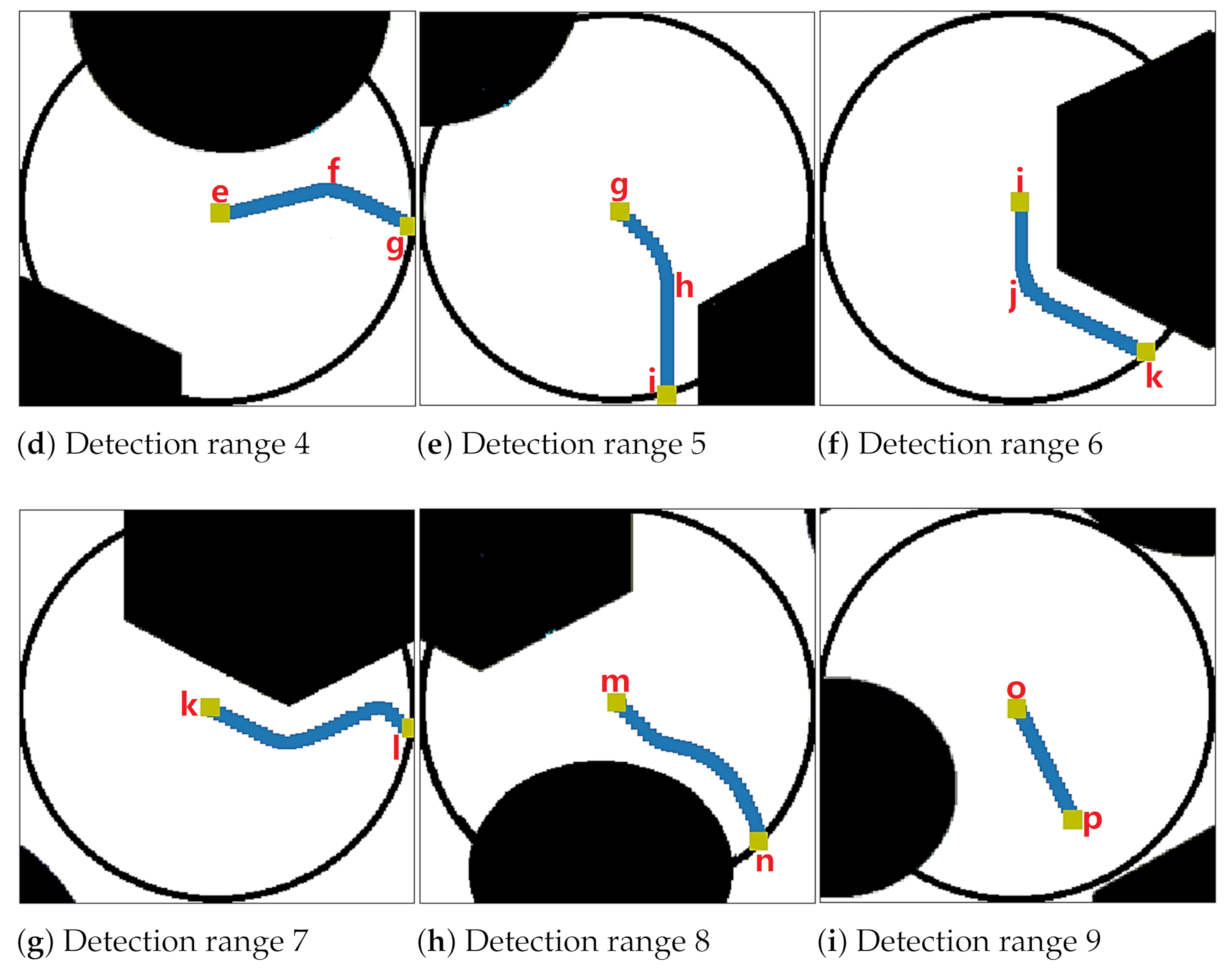
- Use D* Lite to plan routes within the detected area. When changes to the environmental information within the detection range are detected, start dynamic route planning until travelling to the boundary of the detected area. Then, the local path planned within the detected area is finished. Set the current node as the start node and plan a new local path within the detected area, and go to step (2).
4. Simulation Results and Analysis
4.1. Path Planning with Safe Distance
4.2. Path Planning with Constrained Steering Angle
4.3. Path Optimization
4.4. Optimization of Priority Queue
4.5. Simulation of Multi-Goal Path Planning
4.5.1. Multi-Goal Path Planning in Static Environment
4.5.2. Multi-Goal Path Planning in Dynamic Environment
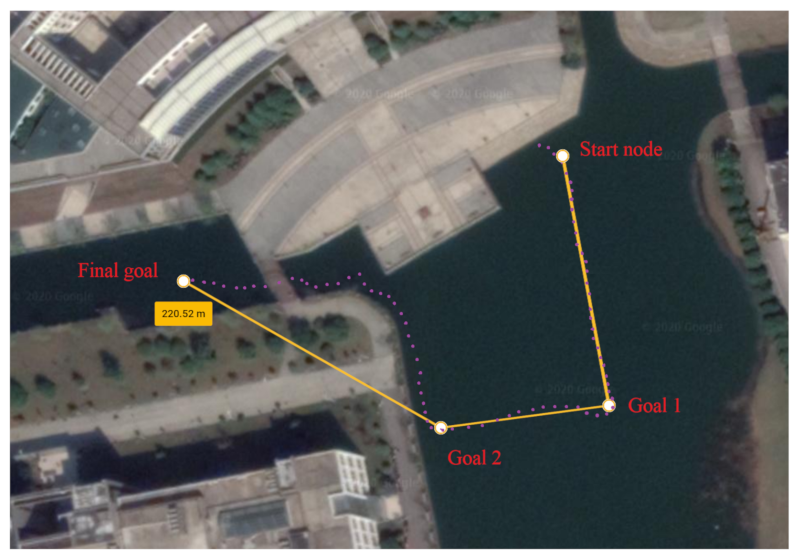
4.6. Path Planning in Unknown Environments
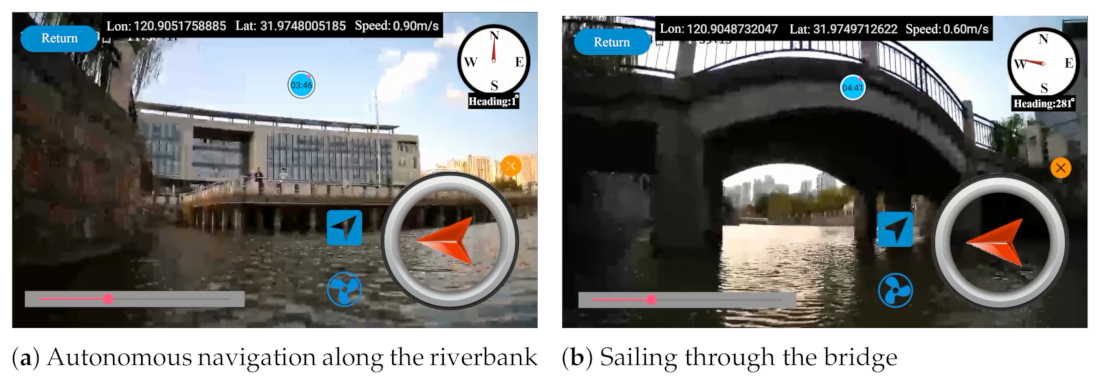
5. Practical Test on USV
5.1. USV and Components
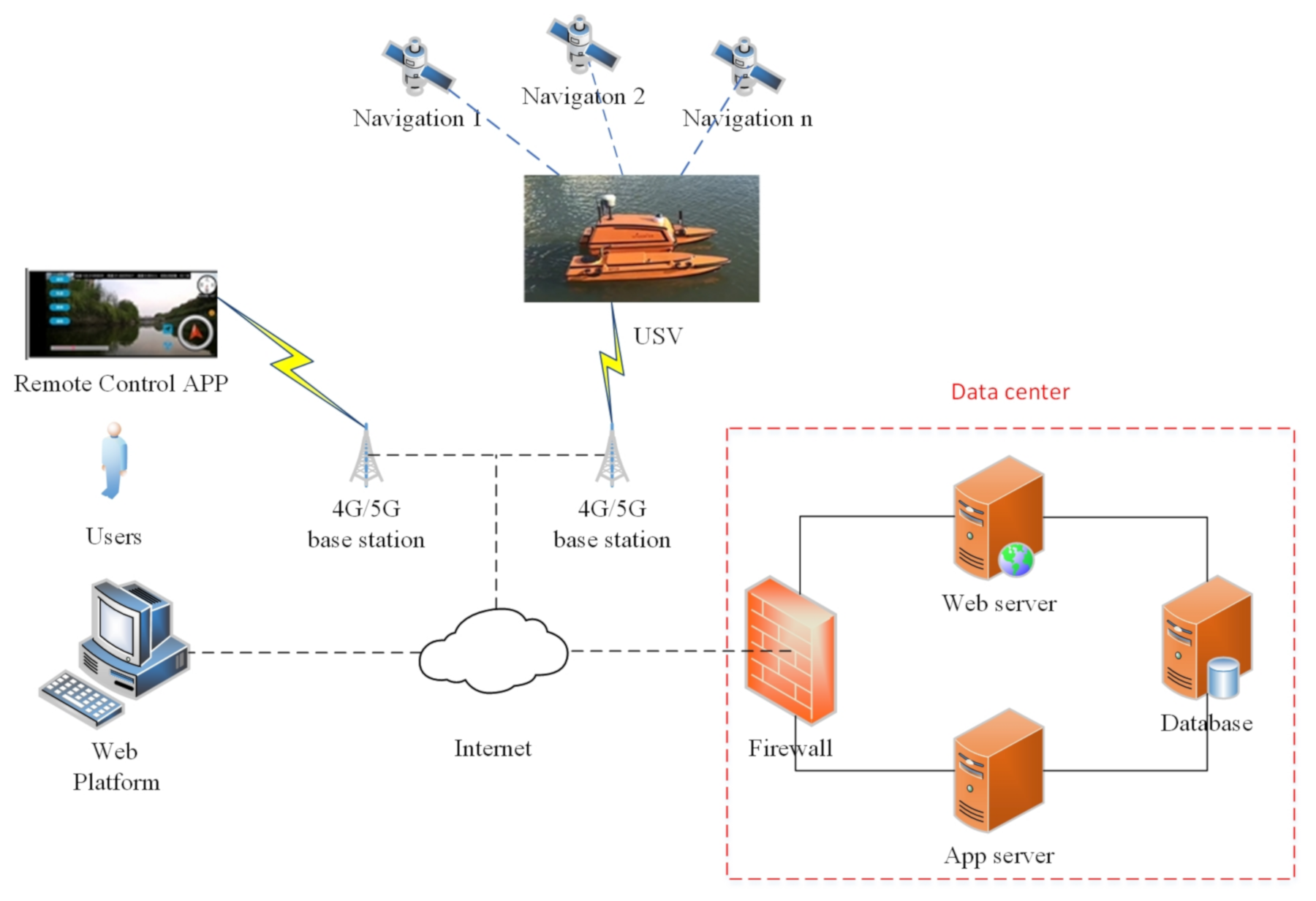
5.2. USV Communication Architecture
5.3. Safe Distance Test
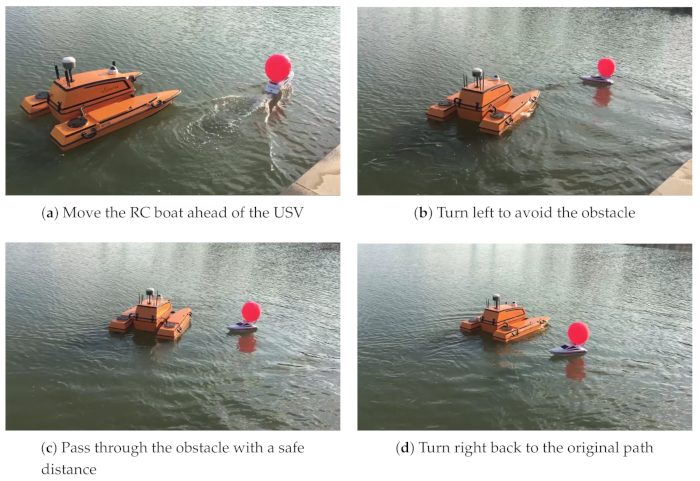
5.4. Dynamic Obstacle Avoidance
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Glasgow, H.B.; Burkholder, J.M.; Reed, R.E.; Lewitus, A.J.; Kleinman, J.E. Real-time remote monitoring of water quality: A review of current applications, and advancements in sensor, telemetry, and computing technologies. J. Exp. Mar. Biol. Ecol. 2004, 300, 409–448. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Li, Z.; Bachmayer, R.; Vardy, A. Vector field path following control for unmanned surface vehicles. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–9. [Google Scholar]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Eng. 2018, 168, 187–201. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Tang, P.; Su, Y.; Li, X.; Yang, G.; Shi, C. An adaptive obstacle avoidance algorithm for unmanned surface vehicle in complicated marine environments. IEEE/CAA J. Autom. Sin. 2014, 1, 385–396. [Google Scholar]
- Shu-Xi, W. The improved dijkstra’s shortest path algorithm and its application. Procedia Eng. 2012, 29, 1186–1190. [Google Scholar] [CrossRef] [Green Version]
- Chao, N.; Liu, Y.K.; Xia, H.; Peng, M.J.; Ayodeji, A. DL-RRT* algorithm for least dose path Re-planning in dynamic radioactive environments. Nucl. Eng. Technol. 2019, 51, 825–836. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Kumar Das, P.; Patro, S.N.; Panda, C.N.; Balabantaray, B. D* lite algorithm based path planning of mobile robot in static Environment. Int. J. Comput. Commun. Technol. (IJCCT) 2011, 2, 32–36. [Google Scholar]
- Stentz, A. The D* Algorithm for Real-Time Planning of Optimal Traverses; Technical Report; Robotics Institute, Carnegie Mellon University: Pittsburgh, PA, USA, 1994. [Google Scholar]
- Stentz, A. The focussed dˆ* algorithm for real-time replanning. In Proceedings of the International Joint Conference on Artificial Intelligence, Montreal, QC, Canada, 20–25 August 1995; Volume 95, pp. 1652–1659. [Google Scholar]
- Lei, Q.; Hui, Z. Implementation of Path Finding on 2D Game Maps. J. Hum. Univ. Technol. 2012, 1, 66–69. [Google Scholar]
- Guo, J.; Liu, L.; Liu, Q.; Qu, Y. An Improvement of D* Algorithm for Mobile Robot Path Planning in Partial Unknown Environment. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 16 October 2009; Volume 3, pp. 394–397. [Google Scholar] [CrossRef]
- Yan, B.; Chen, T.; Zhu, X.; Yue, Y.; Xu, B.; Shi, K. A Comprehensive Survey and Analysis on Path Planning Algorithms and Heuristic Functions. In Proceedings of the Science and Information Conference, London, UK, 16–17 July 2020; pp. 581–598. [Google Scholar]
- Likhachev, M.; Koenig, S. A Generalized Framework for Lifelong Planning A* Search. In Proceedings of the Fifteenth International Conference on Automated Planning and Scheduling (ICAPS 2005), Monterey, QC, USA, 5–10 June 2005; pp. 99–108. [Google Scholar]
- Ferguson, D.; Stentz, A. Field D*: An interpolation-based path planner and replanner. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2007; pp. 239–253. [Google Scholar]
- Koenig, S.; Likhachev, M. Dˆ* lite. In Proceedings of the AAAI Conference on Artificial Intelligence, Edmonton, AB, Canada, 28 July– 1August 2002; pp. 476–483. [Google Scholar]
- Koenig, S.; Likhachev, M. Fast replanning for navigation in unknown terrain. IEEE Trans. Robot. 2005, 21, 354–363. [Google Scholar] [CrossRef]
- Oral, T.; Polat, F. A multi-objective incremental path planning algorithm for mobile agents. In Proceedings of the 2012 IEEE/WIC/ACM International Conferences on Web Intelligence and Intelligent Agent Technology, Macau, China, 4–7 December 2012; Volume 2, pp. 401–408. [Google Scholar]
- Ferguson, D.; Stentz, A. The delayed D* algorithm for efficient path replanning. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2045–2050. [Google Scholar]
- Al-Mutib, K.; AlSulaiman, M.; Emaduddin, M.; Ramdane, H.; Mattar, E. D* lite based real-time multi-agent path planning in dynamic environments. In Proceedings of the 2011 Third International Conference on Computational Intelligence, Modelling & Simulation, Langkawi, Malaysia, 20–22 September 2011; pp. 170–174. [Google Scholar]
- Yu, J.; Liu, G.; Zhao, Z.; Wang, X.; Xu, J.; Bai, Y. Improved D* Lite algorithm path planning in complex environment. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 2226–2230. [Google Scholar]
- Yue, W.; Franco, J.; Cao, W.; Yue, H. ID* Lite: Improved D* Lite algorithm. In Proceedings of the 2011 ACM Symposium on Applied Computing, TaiChung, Taiwan, 21–24 March 2011; pp. 1364–1369. [Google Scholar]
- Yun, S.C.; Ganapathy, V.; Chien, T.W. Enhanced D* Lite Algorithm for mobile robot navigation. In Proceedings of the 2010 IEEE Symposium on Industrial Electronics and Applications (ISIEA), Penang, Malaysia, 3–5 October 2010; pp. 545–550. [Google Scholar]
- Le, A.T.; Bui, M.Q.; Le, T.D.; Peter, N. D* Lite with Reset: Improved Version of D* Lite for Complex Environment. In Proceedings of the IEEE International Conference on Robotic Computing, Taichung, Taiwan, 10–12 April 2017. [Google Scholar]
- Barma, P.S.; Dutta, J.; Mukherjee, A. A 2-opt guided discrete antlion optimization algorithm for multi-depot vehicle routing problem. Decis. Mak. Appl. Manag. Eng. 2019, 2, 112–125. [Google Scholar]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Hoshino, Y.; Peng, C.C. Path smoothing techniques in robot navigation: State-of-the-art, current and future challenges. Sensors 2018, 18, 3170. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zagradjanin, N.; Pamucar, D.; Jovanovic, K. Cloud-based multi-robot path planning in complex and crowded environment with multi-criteria decision making using full consistency method. Symmetry 2019, 11, 1241. [Google Scholar] [CrossRef] [Green Version]
- Edelkamp, S.; Elmasry, A.; Katajainen, J. Optimizing binary heaps. Theory Comput. Syst. 2017, 61, 606–636. [Google Scholar] [CrossRef]
- Yang, L.; Qi, J.; Song, D.; Xiao, J.; Han, J.; Xia, Y. Survey of robot 3D path planning algorithms. J. Control. Sci. Eng. 2016, 2016, 7426913. [Google Scholar] [CrossRef] [Green Version]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Adjacent Nodes | Number of Search Directions | Minimum Steering Angle |
|---|---|---|
| 8 | 8 | |
| 24 | 16 | |
| 48 | 32 |
| Operation | Time Complexity | |
|---|---|---|
| Conventional Queue | Minimum Binary Heap | |
| Pop up | ||
| Push in | ||
| Search | ||
| Map Size | 200 × 200 | 400 × 400 | ||||
|---|---|---|---|---|---|---|
| Search approach | 8-neighbor | 48-neighbor | 48-neighbor with constrained steering angle | 8-neighbor | 48-neighbor | 48-neighbor with constrained steering angle |
| Number of searched nodes | 745 | 1813 | 1869 | 896 | 2516 | 2521 |
| Planning time (s) | 1.16 | 4.07 | 4.14 | 2.07 | 5.47 | 5.63 |
| Number of sharp turns | 25 | 5 | 0 | 29 | 7 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, X.; Yan, B.; Yue, Y. Path Planning and Collision Avoidance in Unknown Environments for USVs Based on an Improved D* Lite. Appl. Sci. 2021, 11, 7863. https://doi.org/10.3390/app11177863
Zhu X, Yan B, Yue Y. Path Planning and Collision Avoidance in Unknown Environments for USVs Based on an Improved D* Lite. Applied Sciences. 2021; 11(17):7863. https://doi.org/10.3390/app11177863
Chicago/Turabian StyleZhu, Xiaohui, Bin Yan, and Yong Yue. 2021. "Path Planning and Collision Avoidance in Unknown Environments for USVs Based on an Improved D* Lite" Applied Sciences 11, no. 17: 7863. https://doi.org/10.3390/app11177863