1. Introduction
The increase in disturbances in the electric power distribution networks due to the presence of harmonics has given rise to an exhaustive search for solutions in the past three decades. The compensation objectives to enhance the electric power quality (EPQ) may be varied, including issues such as reactive power compensation, reduction in harmonic distortion, or correction of unbalanced three-phase currents. Therefore, different active and passive filter configurations have been proposed to solve these problems. Among them, the most important tool for improving the EPQ is the active power filter (APF), and in particular, the shunt APF. This compensation system is more and more relevant, thanks to the development of signal processing and power converters [
1,
2].
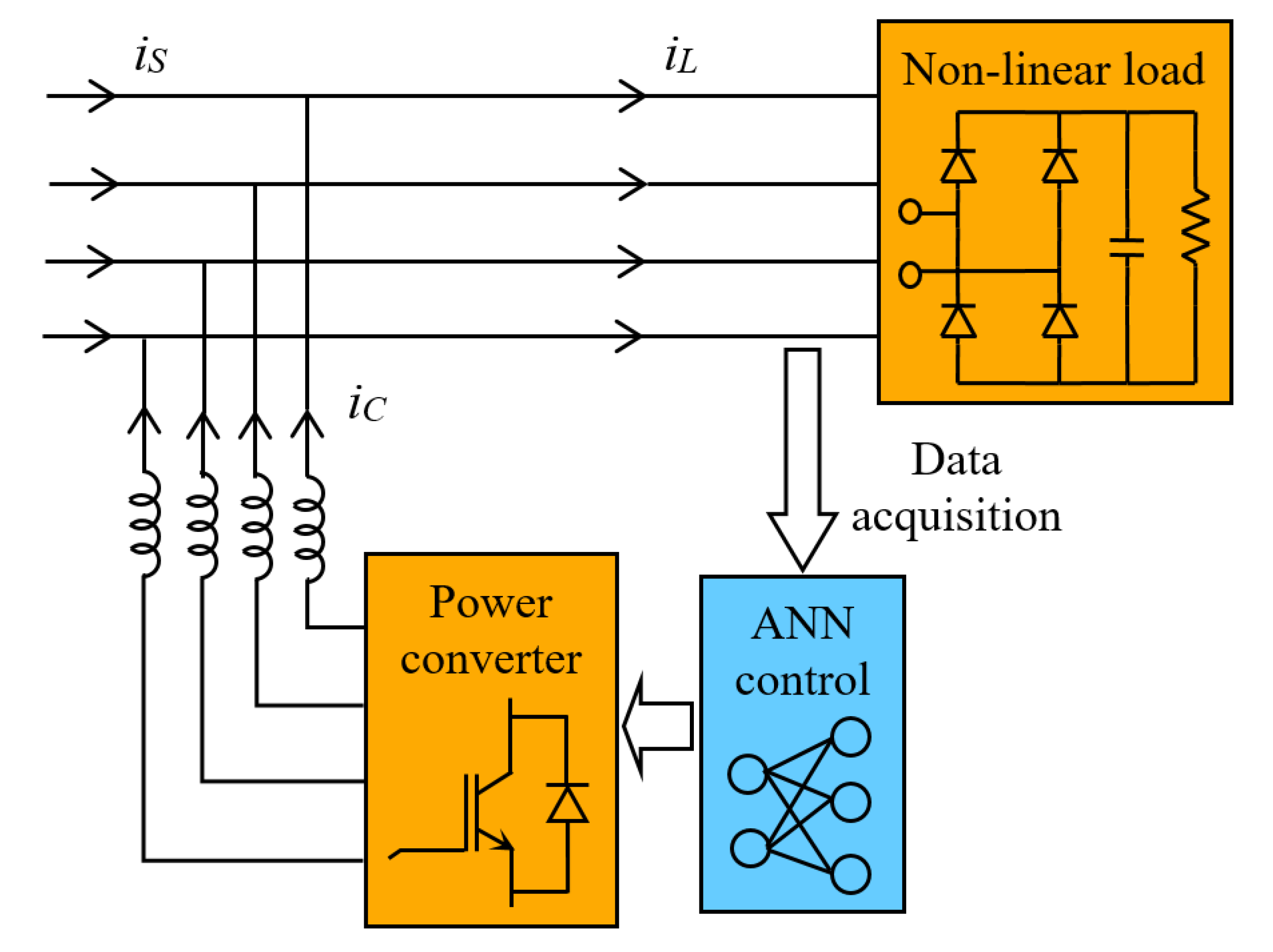
The shunt APF consists of an electronic power converter for use in three-phase systems, connected in parallel with the load to supply compensation currents. The converter is typically based on insulated gate bipolar transistors (IGBTs) and the pulse width modulation technique (PWM), and provides the currents that mitigate the EPQ problems. A control system must generate the appropriate trigger pulses to switch the on-off states of the electronic power devices of the converter, in order to achieve the right output currents. Previously, depending on the compensation goal, the appropriate reference signals for those currents had to be generated. This means that two essential elements in the APF control are the generation of the reference signals and the PWM control method, such as hysteresis band control (HB) [
2]. Other important issues are the control of the power converter DC side [
3] and the phase synchronization techniques [
4]. The purpose of some APF control methods is limited to harmonic distortion mitigation, whereas many others try to achieve both harmonic suppression and reactive power compensation and may include addressing the load currents unbalance.
The use of artificial neural networks (ANN) in the field of power engineering is well known. They make use of parallel computing, allowing the design of control circuits of high speed and reliability. In fact, ANNs have been systematically applied in the development of APF-based equipment, even though there are countless examples of non-ANN control techniques, as in [
5,
6,
7]. A type of ANN usually applied to the APF control is the Adaline, based on the adaptive algorithm of Widrow–Hoff. Thus, in [
8,
9], the Adaline network is used for extraction of the reference currents and the multilayer perceptron network (MLP) replaces the HB control. Moreover, in [
10,
11,
12,
13], the core of the APF control is an Adaline network, which works with an on-line algorithm, under different load conditions. The work in [
14] shows a comparative review of several control methods, including the study of the Adaline, highlighting some of its advantages. However, in these adaptive cases, the appropriate choice of the learning parameter for each problem is very important in order to avoid convergence problems; this is one of its weaknesses. However, recent works [
15,
16,
17] illustrate that researchers continue to propose advances in the application of the Adaline. Other ANN types have also been applied to the APF, but with less relevance. This is the case of the radial basis function networks (RBF) and different topologies of recurrent neural networks (RNN). The RBF has been applied in [
18] for extracting harmonic amplitudes, in [
19] to support a complex adaptive sliding mode control (SMC), and in [
20], it is used in combination with the P-Q power theory to obtain reference signals. Regarding the RNN, which has a structure close to the MLP, but with internal feedback connections, in [
21,
22], it supports complex types of sliding mode controls in the APF. The authors of [
23] achieved good results using the so-called NARX recurrent network for extracting the reference signals. Additionally, the RNN called echo-state network (ESN) has gained importance in recent years for extracting fundamental current components [
24,
25].
The feedforward or MLP networks have shown to be useful in replacing the HB controller to generate the IGBTs trigger signals [
8,
9,
17,
26,
27]. Some authors have applied the MLP [
28,
29,
30] to replace the extended PI control [
31] of the DC side capacitor voltage,
Vdc, of power converters. To a lesser extent, the MLP networks have also been used to obtain the reference signals [
32,
33], with variable results. MLP networks seemed to be a promising tool for harmonic detection and mitigation many years ago [
32,
34,
35,
36]. Nevertheless, they could not be successfully applied for the generation of the reference currents when trying to achieve accurate APF control for all kinds of distortions. They are not adaptive, requiring a previous off-line training using the backpropagation algorithm (BP). Some researchers directly claim limitations of the MLP by generating the reference signals, due to the diversity of loads and kinds of electric disturbances [
24,
33]. Even the works which conclude supporting the capabilities of this ANN type show poor results [
32] and weaknesses—it is difficult to apply a training capable of covering high order harmonics, as well as the possible practical frequency deviations.
It is also worth mentioning the numerous methods combining fuzzy logic and ANNs in different ways. As an example, in [
37], a combination of fuzzy and neural network techniques is used for improved DC voltage control by an APF, where a fuzzy logic controller extracts the training dataset for the neural network. In [
38], an adaptive backstepping fuzzy neural network controller is designed to suppress the harmonics in a SAPF.
In this paper, the main features are as follows. Firstly, a new MLP-based control method for three-phase shunt APFs, able to obtain the reference signals, is proposed. It will prove that this ANN type can provide an alternative tool, which will allow taking advantage of the benefits of MLPs, such as simplicity, no need of online training, fast response, and the absence of internal feedback connections within the network. Secondly, the strategy of use of the ANN consists of estimating the Fourier coefficients of the fundamental harmonic of phase currents and voltages, enabling higher MLP learning capacity than different methods tested by the authors. Thirdly, an effective training method was designed, in which the waveform patterns are automatically generated using random combinations of many different harmonics. Variable fundamental frequencies were included in the patterns, representing the possible nominal frequency deviations in the grid, ensuring a robust control response in different real cases. This method has shown to be more efficient for the MLP learning than any other previously applied. It provides a deep training with a high, but limited, number of patterns. Fourthly, for a compensation strategy that pursues harmonic distortion mitigation and power factor correction, the power theory was applied to develop the computation steps, from the coefficients of every phase current and voltage that lead to the reference currents. The method also will be able to correct the currents’ unbalance, in the case of balanced supply voltages. The paper is structured as follows. In
Section 2, the fundamentals of the control strategies are described.
Section 3 addresses the explanation of the neural network configuration and the training steps carried out. In
Section 4, practical cases are simulated and thoroughly tested using the MATLAB-Simulink platform, and a practical case is tested in laboratory. Finally, the conclusions highlight the contributions of the work.
3. MLP Neural Network and Training
Since the purpose is to use feedforward neural networks capable of identifying the fundamental harmonic in periodical distorted waveforms, next follows the description of the MLP network and the training method. The ANN must obtain the rectangular coefficients that enable the generation of the reference signals. Due to the infinite possible harmonic distortions, a large amount of data is necessary for the training. This section presents the way in which the MLP can be configured and trained using a high, but limited, number of patterns.
3.1. MLP Neural Networks
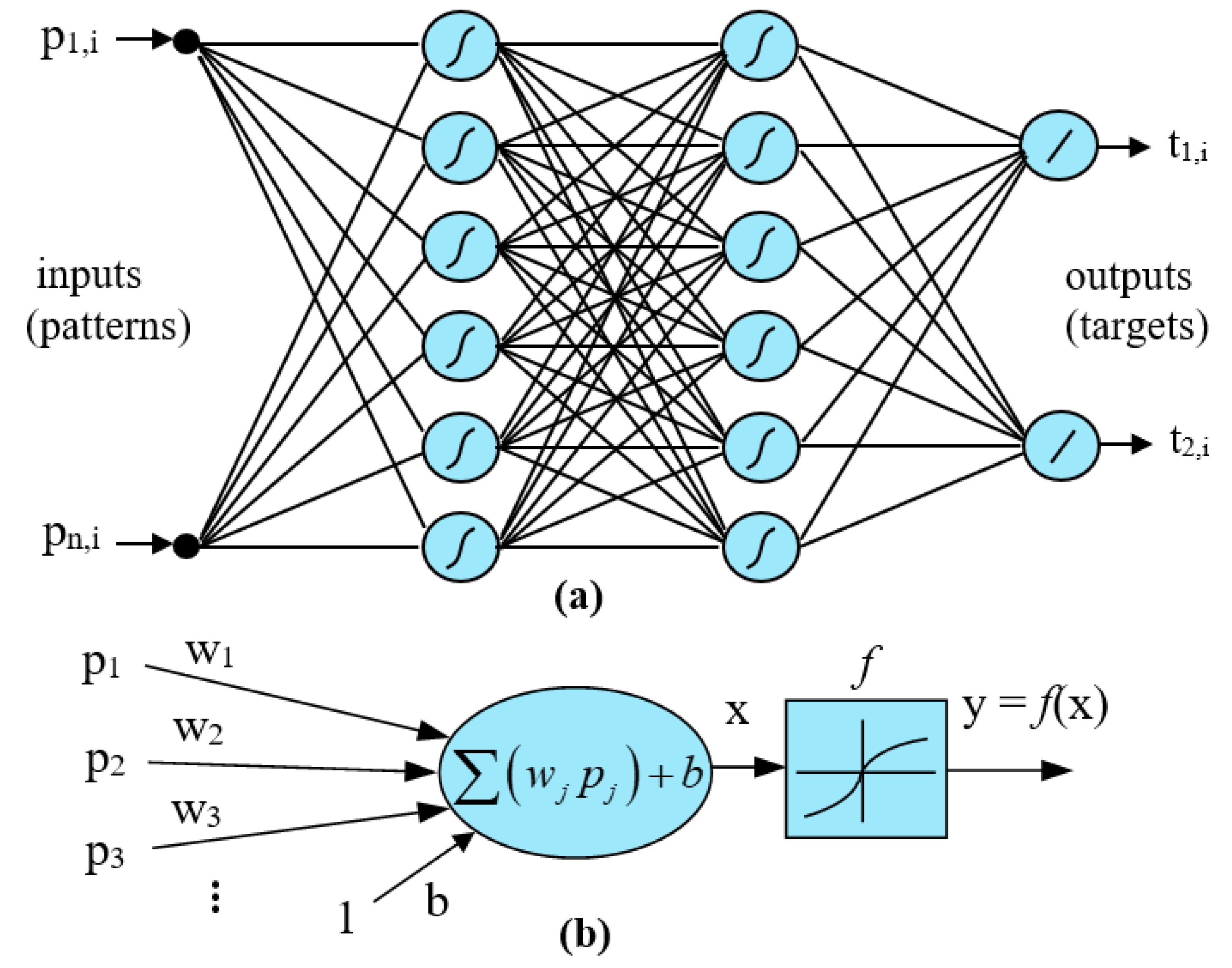
The multilayer perceptron neural network consists of a determined number of neurons, organized in two or more layers, highly interconnected [
39]. The neuron operation consists of applying a determined transfer function to a weighted sum of its inputs. The MLP topology can be seen in
Figure 4. It is usual the choice of a “tan-sigmoid” transfer function for hidden layers and a “linear” function for output layer.
The MLP network requires supervised learning. It uses a given set of input-output pairs for adjustment of the interconnection weights. The backpropagation learning algorithm is applied to adjust the weight array,
W, associated with the interconnections. For each learning cycle, the ANN receives the input vectors (organized in the input matrix array containing the patterns,
P). The resulting output vectors are compared to the desired outputs contained in the learning patterns (organized in the output matrix array containing the targets,
T), and the performance index is calculated. This index is the mean squared error, “
mse” [
40], given in (15).
Figure 4a shows the MLP with the inputs and outputs used in the training process.
Figure 4b shows the operation of a neuron in any of the layers. The mathematical backpropagation algorithm determines the re-adjustment of the interconnection weights to reduce the
mse. This cycle is iteratively repeated until the
mse reaches a small enough value, previously given as the training goal.
The performance index,
mse, taken as the accuracy goal whose value must be minimized, is defined as in (15):
where
m is the number of training patterns, and
yi,
ti, are the output and target vectors corresponding to the pattern
i. The difference
yi − ti is the error vector for that pattern, and ǁ
yi −
tiǁ expresses the error vector length in the output space. In particular, with a two-neuron output layer, the output space is bidimensional. The sum of the squares of those error lengths, divided by
m, gives the mean squared error, which is calculated after every iteration or epoch.
Among the different available backpropagation algorithms, the default algorithm applied in feedforward ANN training by the Neural Network Toolbox in MATLAB is the Levenberg–Marquardt algorithm, LM. It is also known as Damped Least-Squares, DLS. The authors have also tested other algorithms, such as the Scaled Conjugate Gradient, SCG. However, the best results were, in general, obtained with the LM algorithm.
The required number of neurons and neuron layers is selected after some tests of convergence. We have experienced with one, two, and three hidden layers.
The work stage after the training usually consists of some simulation tests to check the performance of the resulting network, evaluating its “generalization” capability. It consists of checking the ability of the ANN to give the correct output for input vectors different from those used for training.
3.2. Training for Fundamental Harmonic Detection
In [
32], the MLP networks were trained to estimate the amplitude and phase of the main harmonics in distorted waveforms, from order 3 up to order 13. From these variables, the distortion component waveform was generated. This could be employed as compensation current, thus eliminating a part of the distortion. Besides, the patterns and training were based on a fixed 50 Hz fundamental frequency. The use of only few harmonics, and a fixed electric frequency, does not ensure an efficient operation for the typical nonlinear distortions. The ANN showed some potential for this kind of objective, but with limited and poor results. In [
33], a comparative analysis was conducted between the application of the Adaline network and the MLP to obtain the reference signals for a shunt APF. The conclusion in that work is that the MLP performance is much lower than that of the Adaline method. However, in our opinion, the problem is with the inappropriate application strategy and training method.
In this work, the APF control method is based on the sampling of every waveform cycle of the current or voltage for the ANN input. A nominal 50 Hz electric frequency was considered. Nevertheless, the method should also work regardless of which electrical frequency is used. In the case of 50 Hz, after every time interval of 20 ms, the ANN outputs are the rectangular coefficients of the fundamental harmonic.
3.2.1. Patterns Generation
After a huge number of tests with different points per cycle and number of ANN inputs, a slow sampling rate of 2.5 kHz could be chosen, i.e., 50 points per waveform cycle, which means that the neural network must contain 50 inputs. For the strategy of extracting the fundamental harmonic, there was no need to increase the number of samples. It also works with faster sampling, but at the cost of increasing the size and complexity of the ANN, as well as the training times, without achieving higher performance.
Different harmonic spectrums of nonlinear loads were analyzed to choose suitable magnitudes of the different harmonics.
Table 1 shows the intervals of values allowed for the rectangular coefficients of the odd harmonics, up to the 35th, used in the training patterns. The determination of the suitable harmonics and amplitudes was also the result of a long process, based on the authors experience and the trial-and-error method.
An important requirement for the control method is to maintain its performance in case of electric frequency deviations from the nominal value of 50 Hz. A robust behavior of the ANN requires the use of different fundamental frequencies in the training patterns. In some previous tests, we could observe that an ANN trained only with 50 Hz does not work properly in practical cases due to the possible frequency deviations of the supply voltage. Therefore, the patterns were generated using five different values of frequency between 49.5 and 50.5 Hz.
A key feature enabling the required MLP learning has been the use of random combinations of harmonics. Initially, we generated high amounts of patterns in determined manners, without obtaining a low enough mse. Then, using the MATLAB function “unidrnd” it was possible to randomly generate any number of patterns: A1 = (unidrnd(5,1,1)-3)*0.5; B1 = (unidrnd(5,1,1)-3)*0.5; A3 = (unidrnd(5,1,1)-3)*0.3; and so on, up to B35. This operation gives, for A1, random values from the set {−1, −0.5, 0, 0.5, 1}. This approach provided a very efficient set of patterns. For every different frequency, an amount of 20,000 combinations of harmonics were generated, providing an input matrix P of size 50 × 100,000. The size of the desired targets matrix T is 2 × 100,000, containing the A1 and B1 values of every waveform.
3.2.2. Design, Training and Testing
After many tests with different combinations of hidden layers and neurons per layer, the best configuration found was 50-10-10-2. That is, 50 input units, 2 hidden layers containing 10 neurons each, and the 2-neuron output layer. The transfer functions are tan-sigmoid in the hidden layers, and linear in the output one. These decisions were based on the authors’ experience and on many trials, reducing the number of neurons as much as possible. This allows us to increase the number of patterns used in the learning process, without excessively long training times.
Both the LM and the SCG backpropagation algorithms were used for training, but in general, the LM algorithm allowed us to achieve lower values of the goal mse parameter. After a training of 100 epochs with LM, a value of mse = 2·10−7 could be reached. The SCG method carried out thousands of epochs in the same time intervals, yet it did not reach the same low errors. So, the definitive ANN used was trained with LM. Concerning the conditions to end the last and definitive training, the key aspect is to observe the evolution of the mse with the increase in the number of epochs. Once we knew that in different trials, the mse value stopped decreasing after 80 or 90 epochs, taking values around 2·10−7, we set a number of 100 epochs as training limit, and run the last training.
After training the ANN, the generalization capabilities and the accuracy of the outputs were checked. For these performance tests, we generated a high number of waveforms with random combination of the different harmonics and different fundamental frequency values. Many of these inputs included coefficients
Ai and
Bi exceeding the limits shown in
Table 1. In addition, the fundamental frequency was used, exceeding the limits applied by the pattern generation. In particular, frequencies from 45 to 55 Hz were tested. The results of the generalization tests were satisfactory, proving that the ANN was accurate enough to be used in practical cases of three-phase systems.
4. Results in Practical Cases
In order to quantify the results obtained with the ANN-APF, two essential indices were used: the total harmonic distortion of the supply current,
ITHD, defined in (16), and the power factor,
PF, defined in (17), measured before and after compensation.
Those indices, together with the monitoring of the voltages and currents waveforms, will allow us to evaluate the system performance. In addition, international standards were taken into account: IEC 61000-4-30 [
41] and EN-50160 [
42]. Thus, it is strongly recommended to achieve a source current
ITHD below 5% and a
PF close to one. In that sense, the control system will be required to operate in the environment of 50 Hz ±1%, i.e., from 49.5 to 50.5 Hz, as this is the interval in which the frequency must be during 95% of the time every week. Obviously, it is also desired that no important disturbance would be observed in case of higher frequency deviations. The standard requires the electrical network to work 100% of the time in the interval from 50 − 6% to 50 + 4%, i.e., from 47 to 52 Hz [
41].
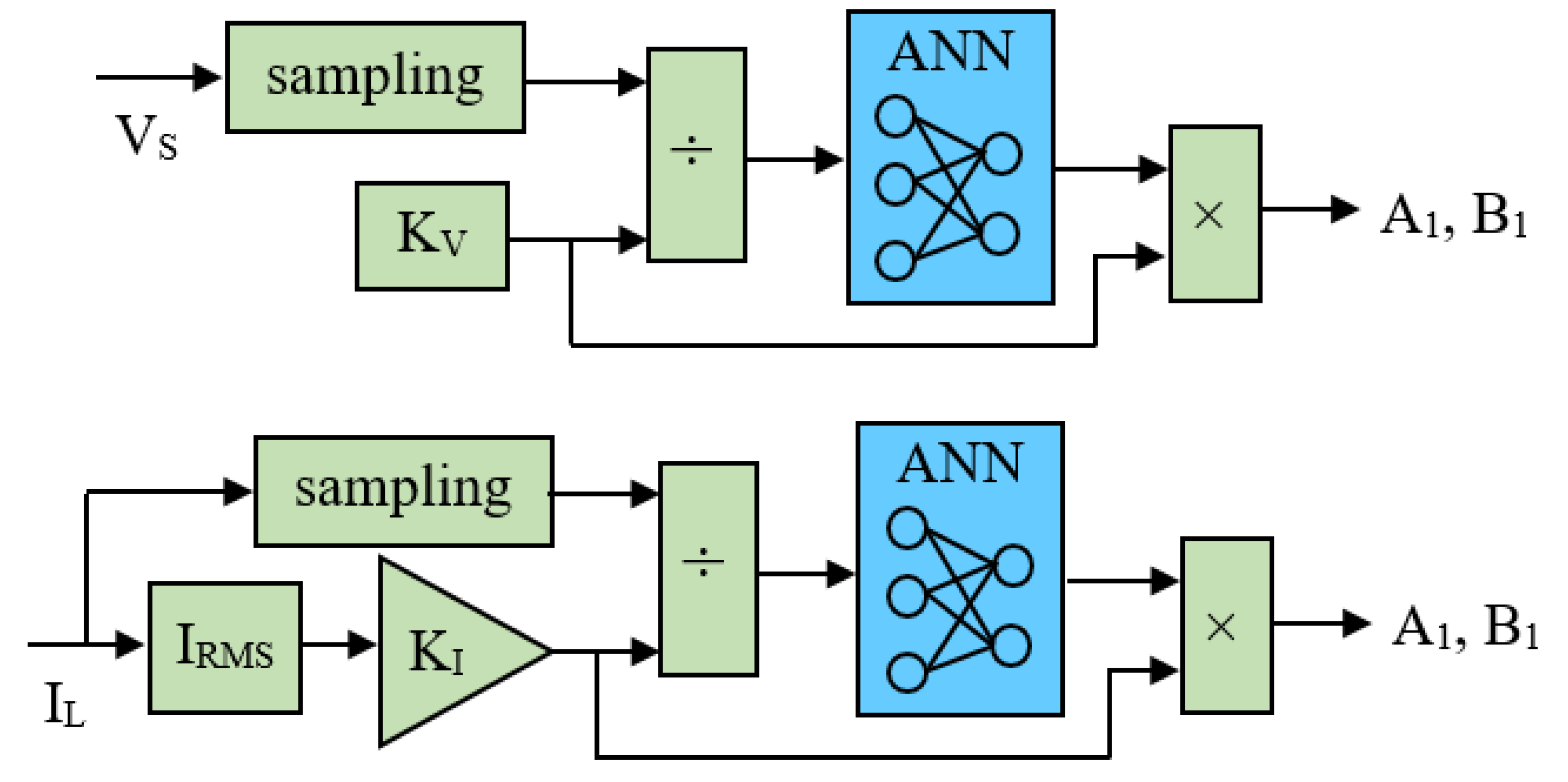
In order to use the neural networks with currents and voltages of practical three-phase circuits, a scale factor must be applied to the waveforms before accessing the ANN, because their amplitudes can reach values of several Amperes and hundreds of Volts. The generalization capability tests showed a wide tolerance for input waveform amplitudes. However, the ANN performance is higher if the input waveforms do not significantly exceed the ±1 range.
In the practical cases, the voltage waveforms have amplitudes over 300 V, whereas the fundamental harmonic amplitude in the waveform patterns was not higher than sqrt (1
2 + 1
2) ≈ 1.414. Therefore, the voltage inputs were divided by a scale factor
KV before reaching the ANN, and consequently, the outputs must be multiplied by the same factor.
Figure 5 shows the required adjustment of the inputs and outputs.
For the same reason, current inputs need the application of a scale factor. Considering the dependency of the currents on the variable loads, the scale factor was based on the measurement of the load current
rms value. The product
KI·IRMS has provided an autonomous adjustment of the scale factor. In particular, values of
KI = 0.4 or 0.5 were appropriate. The current data are divided by
KI·IRMS and the ANN output is multiplied by the same factor.
Figure 5 shows this input and output adjustment.
No special stability analysis was conducted. On one side, the feedforward ANNs have no feedback connections, and do not use online training algorithms to adjust any parameter. The ANNs use the load current signals (independent of the SAPF injected currents) to obtain, after every cycle, the coefficients A and B for generation of the reference signals. This absence of feedback loop can contribute to a stable behavior. On the other side, the hysteresis PWM control and the use of inductors in the connection of the APF with the three-phase system usually do not cause unstable operation. If the ANN control does not obtain correct coefficients in some of the cycles, the APF could produce some short time intervals without a perfect compensation. However, the way in which the ANN refreshes the outputs after each cycle should avoid any rare cumulative effect or stability problem. Therefore, no concerning SAPF unstable operation should be expected. All practical cases tested in this work presented stable operation.
4.1. Results by Simulation Practical Cases
Some MATLAB Simulink models have been designed to test the operation of the neural control of the APF in several cases, including different loads, frequency deviations, and step changes in the load.
Both compensation objectives described in
Section 2 were tested: HC and UpfC. The common objective of reducing the harmonic distortion was analyzed by measurement of the
ITHD, which is desired to reach values under 5%, whereas the UpfC control method is expected to achieve a
PF close to unit, in addition to the low
ITHD.
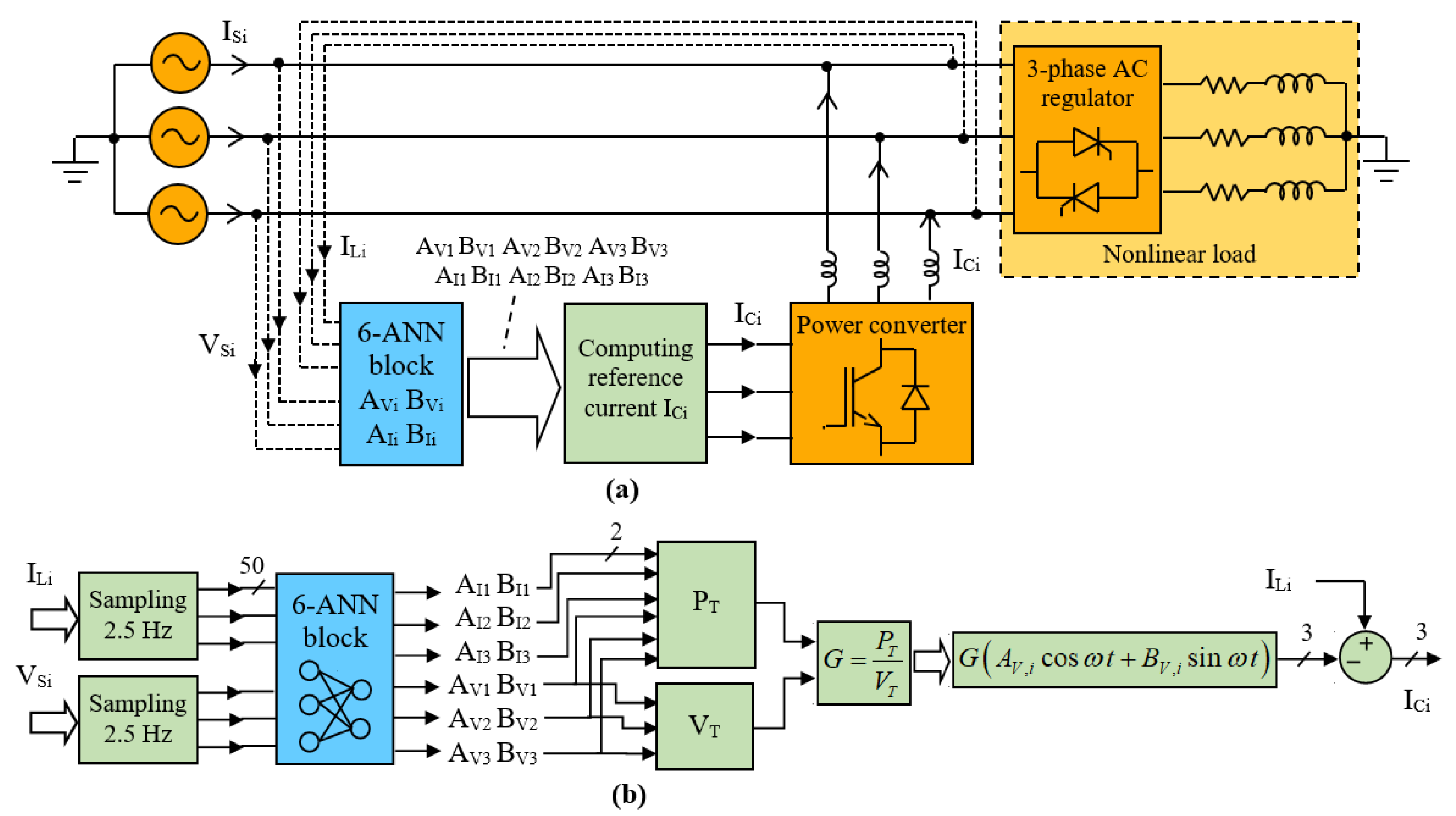
Table 2 shows the most relevant parameters of the electric system and APF used in the simulation models. The nonlinear load consists of a set of impedance branches connected to AC regulators based on thyristors, as shown in
Figure 3a.
4.1.1. HC Control Method Simulation Results
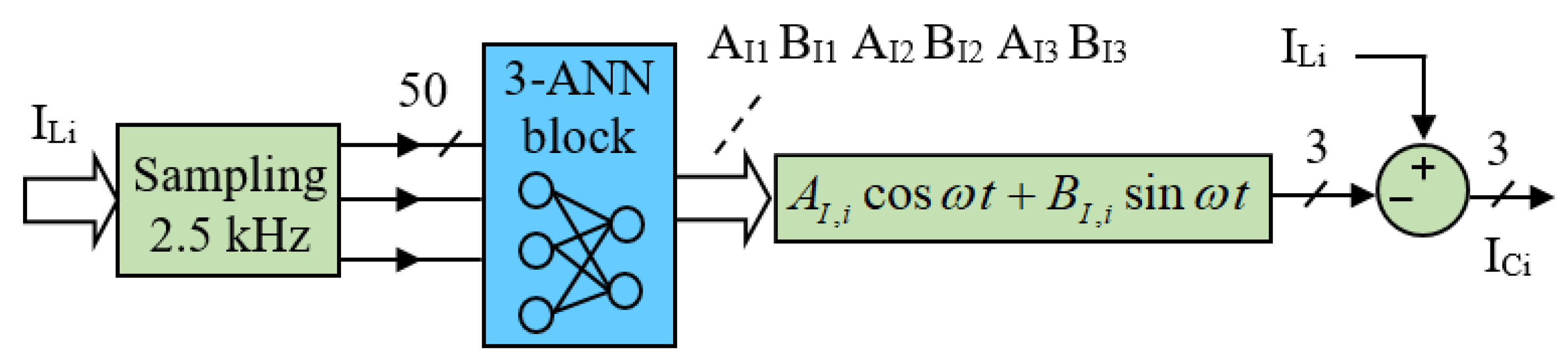
The first practical case is based on the HC method according to operation in (6), shown in
Figure 2. The use of three ANNs, working in parallel, allows us to obtain the fundamental components of the phase currents. The subtraction of these components from the load currents gives the reference signals for the power converter. This test was carried out with a 50 Hz frequency and a load consisting of a three-phase thyristor regulator with firing angle of 90°, followed by RL series branches with values shown in
Table 2.
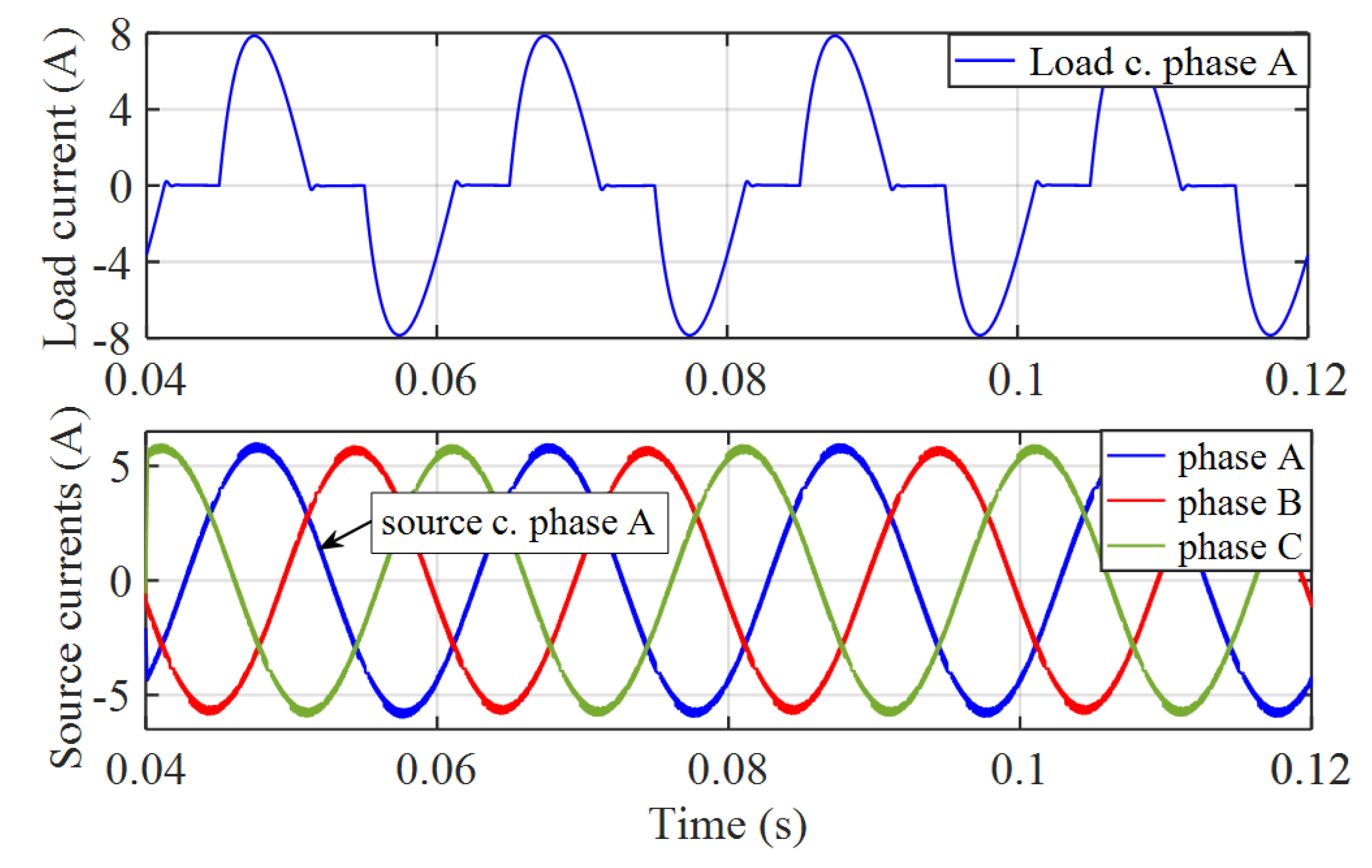
Figure 6 shows the load and source currents resulting in this case. Whereas the load
ITHD is 43%, the value at the source is reduced to 2.4%.
Another test was carried out to analyze the dynamic response in case of load change. The connection of an additional load in parallel with the former nonlinear one shown in
Figure 3a was established at time
t = 0.08 s. It is a linear load consisting of RL series branches of values 60 Ω and 80 mH.
Figure 7 shows the resulting waveforms, where it can be seen that two electric cycles after the change, the source currents reach the new steady state. The load
ITHD after the change is 24%, and 1.7% for the source currents. The system behavior for some other tested changes showed similar performance.
4.1.2. UpfC Control Method Simulation Results
The next step is the simulation of practical cases based on UpfC control where a more complete compensation is searched. According to (13) and
Figure 3, this objective requires in general the use of six ANNs for the estimation of the rectangular coefficients
AI,i,
BI,i,
AV,i and
BV,i. In addition, a different computation block is used after the work of the ANNs, as described in
Section 2 and
Appendix A, and shown schematically in
Figure 3b.
The same system parameters of
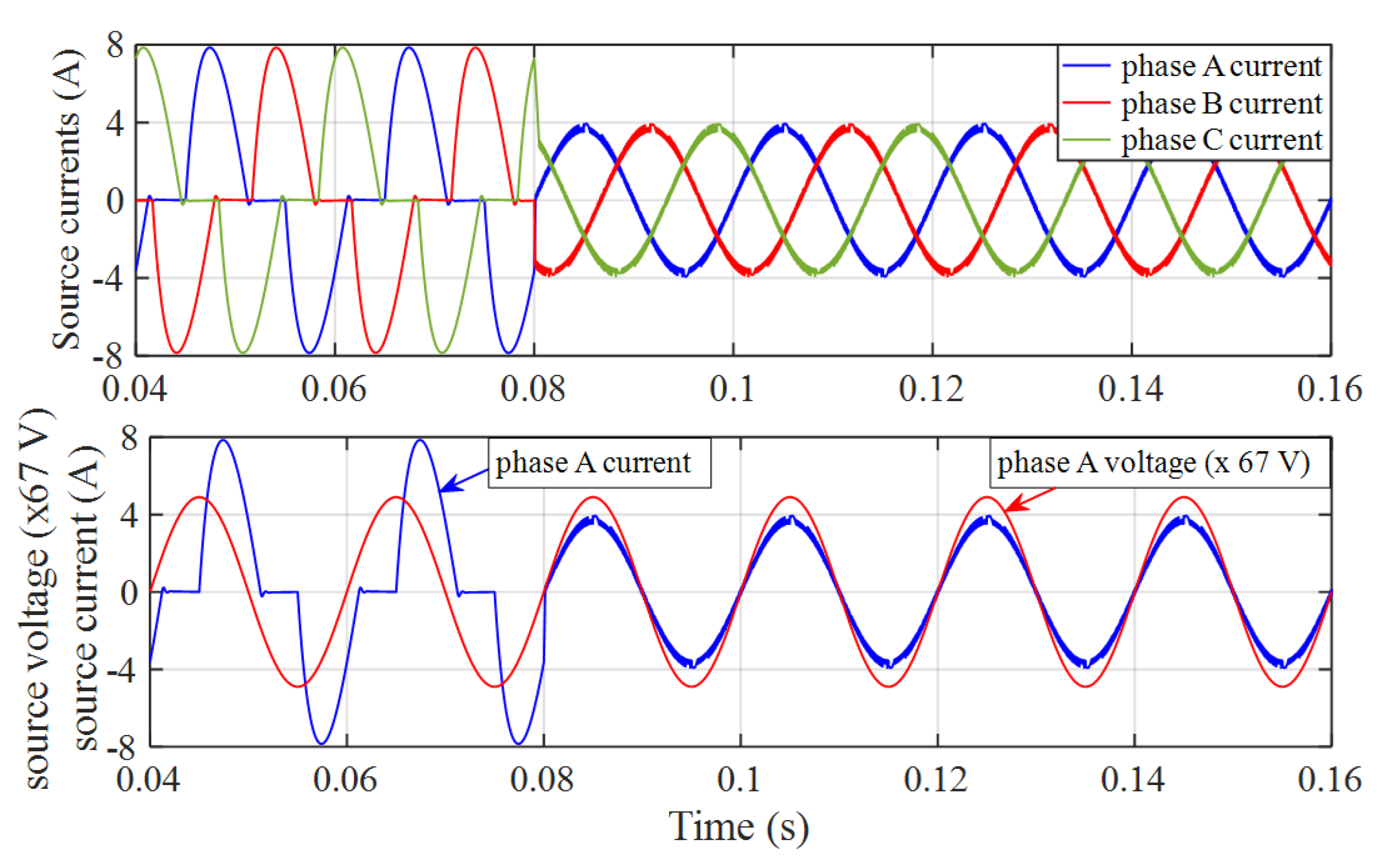
Table 2 were used. The waveforms in
Figure 8 show the results, before and after the connection of the shunt APF at time
t = 0.08 s. The source currents become sinusoidal and in phase with the voltages. The
ITHD is reduced from 43% to 3.7%, improving the
PF from 0.583 to 0.9993.
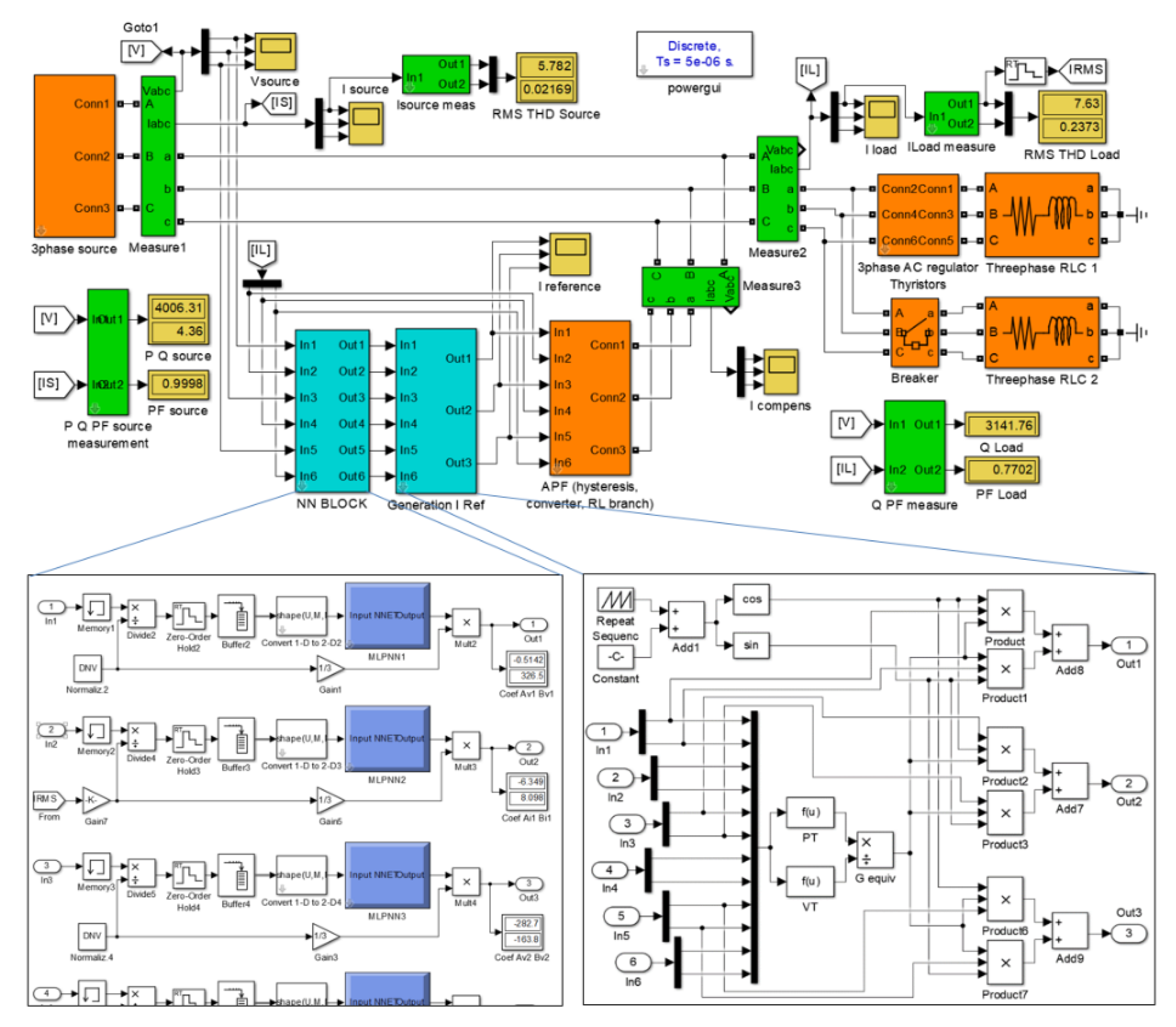
Figure 9 shows the Simulink model for this compensation strategy.
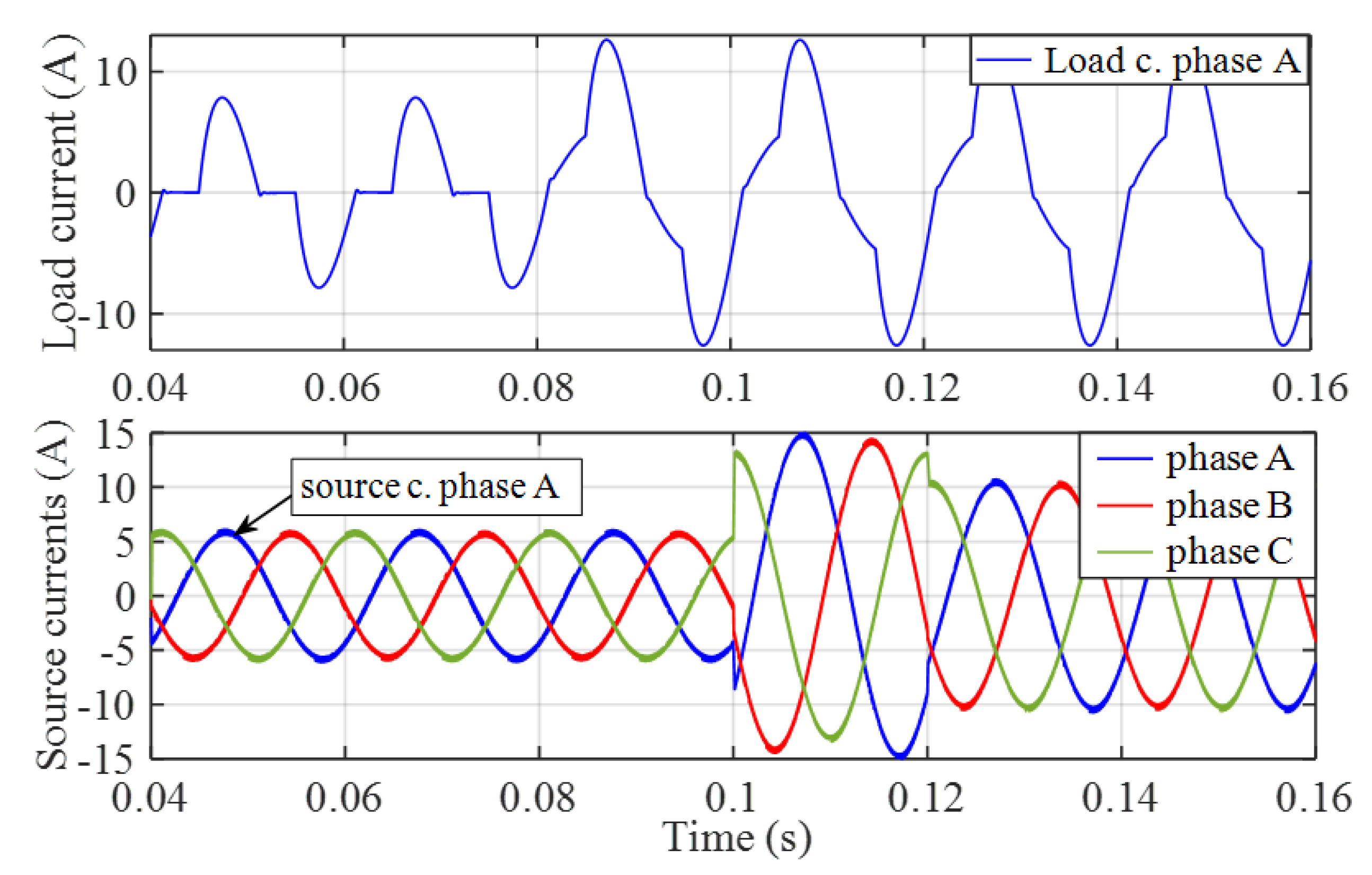
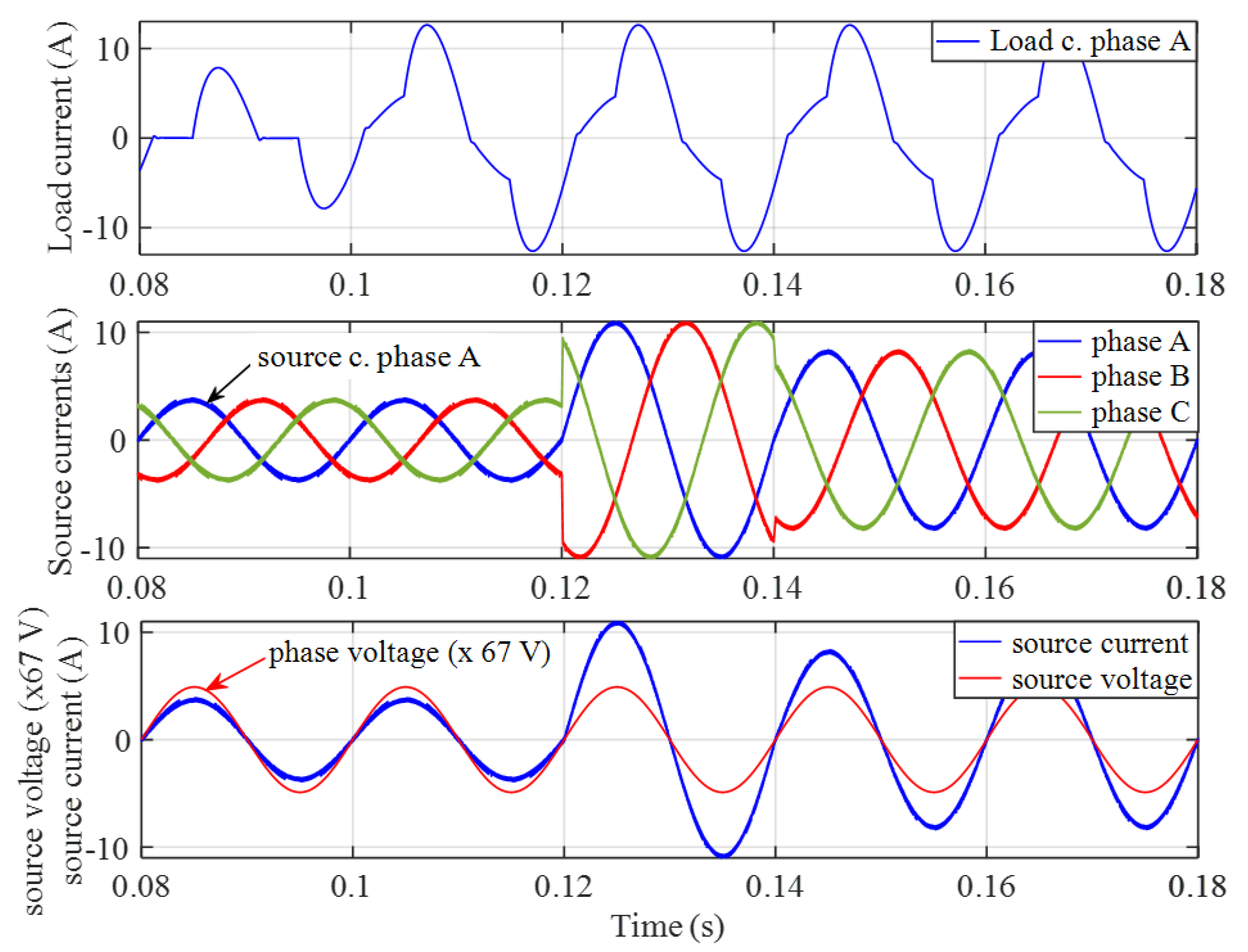
Next, some tests were carried out to observe the dynamic response in case of load changes. Two different changes were applied. In the first test, whose Simulink model is shown in
Figure 9, a linear load was connected in parallel with the nonlinear one of
Figure 3a or
Figure 9, at
t = 0.1 s, with the same values of
R and
L as in the former subsection.
Figure 10 shows the results. It can be seen that after two cycles, the source currents recover the steady state sinusoidal waveforms, in phase with the voltages. The
ITHD after the change is 24% for the load currents and 2.2% for the source currents. The current values after the change are 7.63 A at the load and 5.78 A at the source. The
PF is 0.7702 at the load and 0.9998 at the source.
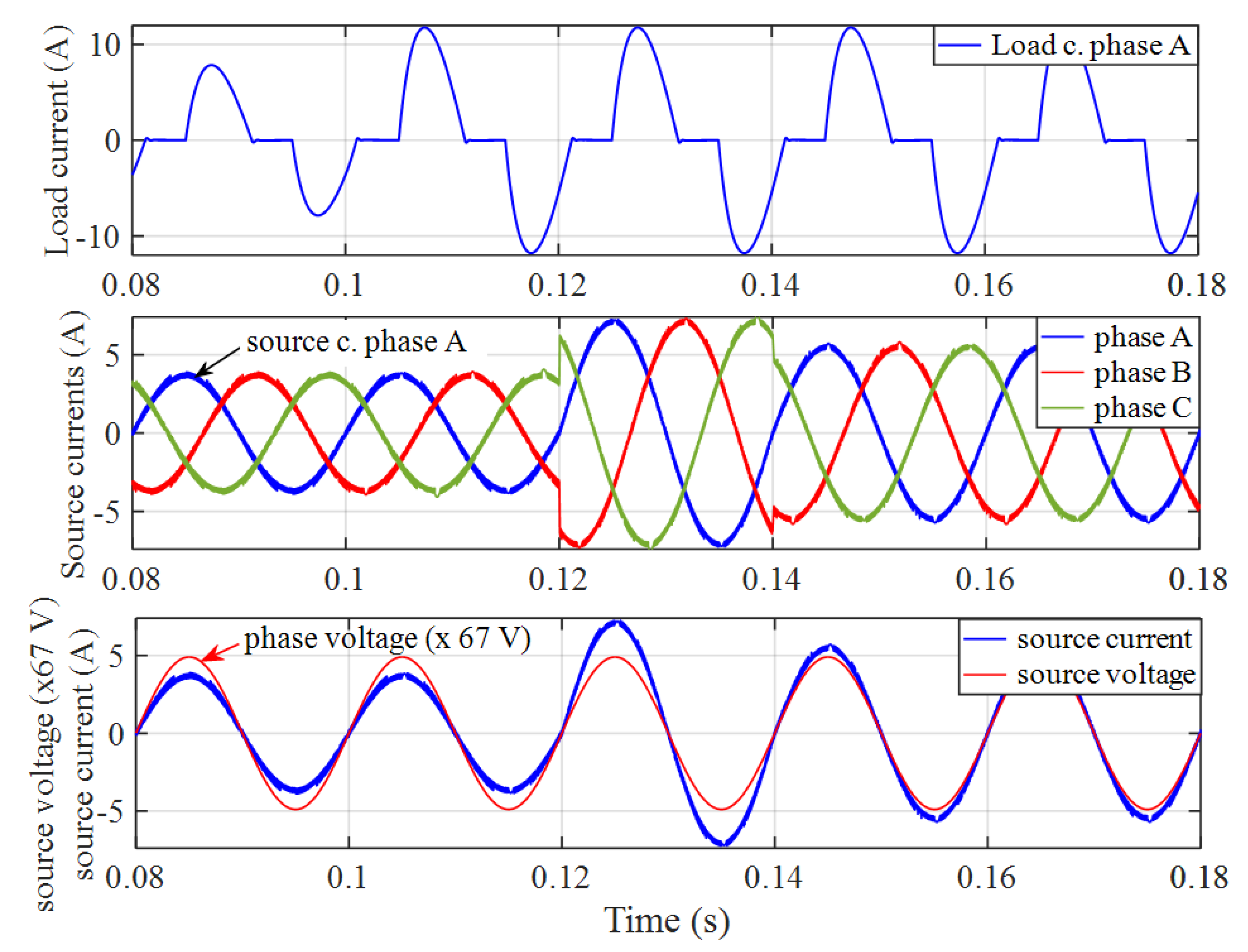
In the second load change tested, an increase in the nonlinear load was applied, connecting a new RL load in parallel with the RL branches of
Figure 3a, behind the thyristors’ regulator.
Figure 11 shows the waveforms. Again, after a short transient, the source currents recover the desired stationary state with sinusoidal waveforms, in phase with the voltages. The
ITHD after the change is 43% for the load currents and 3.3% at the source. The current values are 6.69 A at the load and 3.90 A at the source. The
PF is 0.5828 at the load and 0.9994 at the source.
Some of the Adaline-based control methods show that the time interval to recover stationary state after a change is around one quarter of a cycle [
11,
12]. In [
12], they have proven that among the different tested methods, this is the fastest response observed, while some other control methods require several cycles. For example, one of the recent control methods with good general results, as is the case of [
23], using the NARX neural network, requires more than five cycles after the load change. Hence, we can affirm that the two-cycle interval observed in this work is not a high amount of time.
4.1.3. UpfC Tests by Frequency Deviations
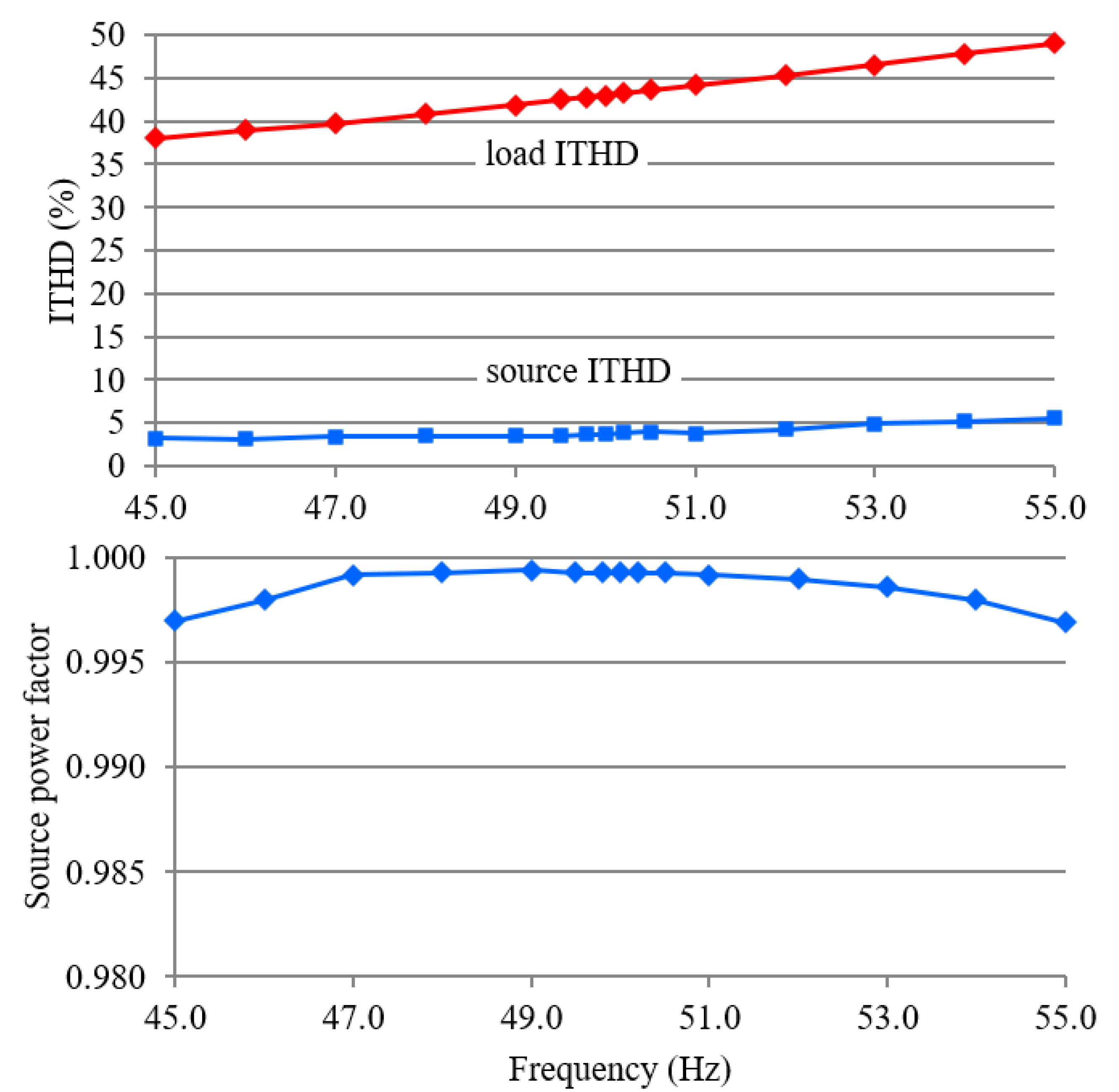
One of the relevant objectives of this work was the robust behavior of the control system under the contingency of frequency deviation. For the ANN training, the distorted waveform patterns included different fundamental frequency values. The UpfC control performance was tested in two different ways. In the first test, the performance of the compensation system was analyzed in a range of frequencies between 45 and 55 Hz, in terms of ITHD and PF. In the second test, the dynamic response was evaluated in case of frequency changes during system operation.
With the same system parameters of
Table 2, the measurements for different frequencies were established. In previous subsections, with a 50 Hz frequency, it has been reported that the load
ITHD was 43% and the
PF was 0.583. Now, it can be observed in
Figure 12 the graphical results of
ITHD and
PF versus frequency. The load
ITHD is high for every frequency, but the source
ITHD remains under 5%, with values under 4% inside the important interval proposed by the IEC Standard [
31], from 47 to 52 Hz. Regarding the
PF achieved, the values are very close to unity, over 0.997 in the whole frequency interval, and over 0.999 in the interval from 47 to 52 Hz.
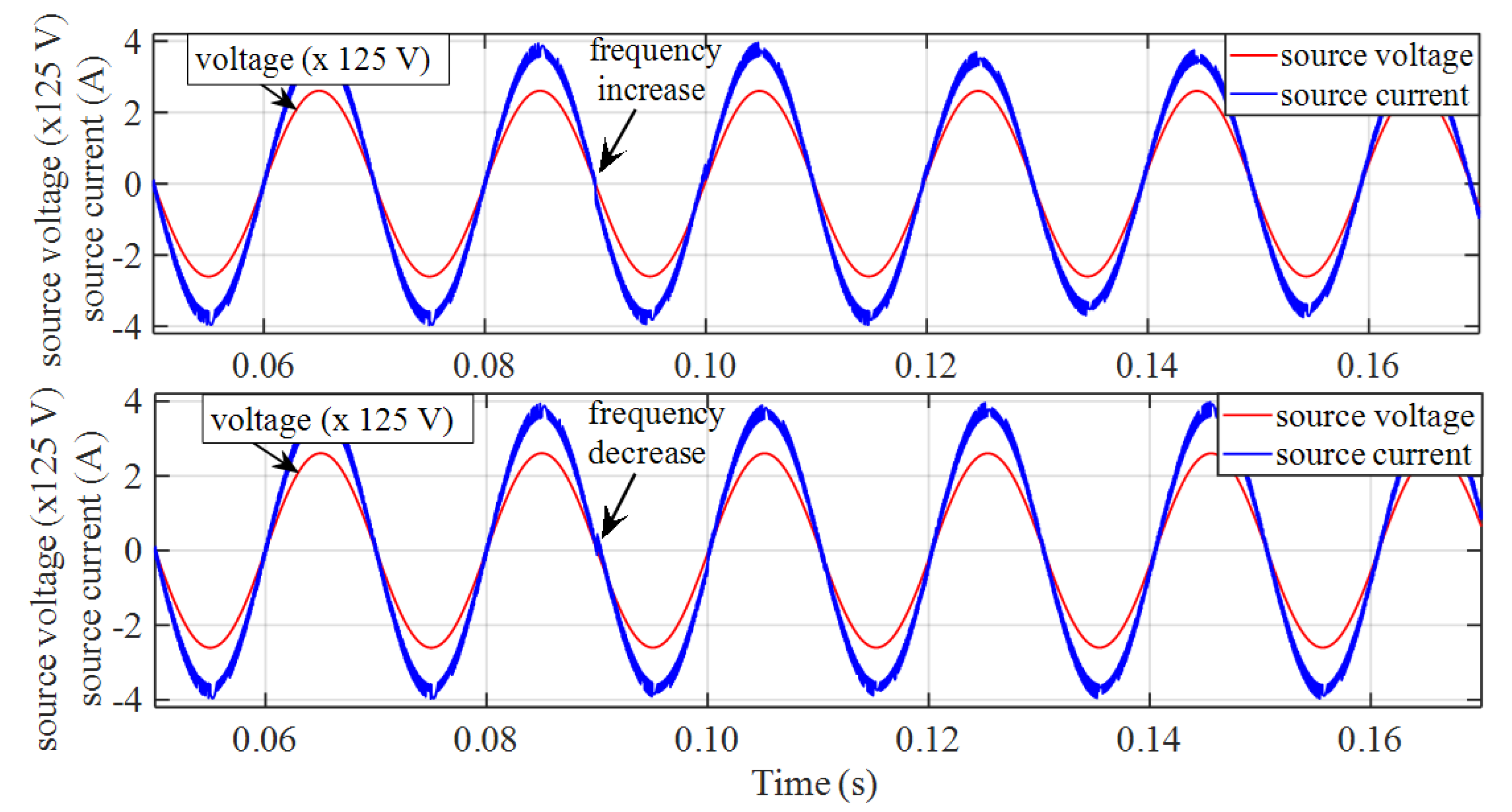
In the second test, step changes of 0.5 Hz were applied during system operation. In particular,
Figure 13 shows the behavior for an increase from 50 to 50.5 Hz at
t = 0.09 s, and a decrease from 50 to 49.5 Hz at
t = 0.09 s. The source current reaches steady state after one cycle.
In conclusion, the UpfC control performance is robust enough under frequency deviations. It achieves the required compensation inside a wide frequency range and can respond quickly to the frequency changes.
4.2. Experimental Results
Harnessing the potential of ANNs requires their implementation in a specific integrated circuit. However, a laboratory setup based on data acquisition cards has allowed for a first experimental validation in obtaining compensation currents with ANNs. Thus, a modular system based on dSpace cards was developed. Specifically, the set includes a DS1005 PPC control card developed from a PowerPC 750GX 1 GHz processor that runs the control program in real time. This card manages the inputs and outputs from/to the power system through a DS2004 card with 16 input channels, and a DS5101 DWO card with 16 TTL pulse outputs. The input signals to the DS2004 card are from a set of Hall effect LEM sensors: LV-25-P sensors for voltage signals and LA35-NP sensors for current signals. The APF power circuit consists of a three-phase inverter with IGBTs, the Semikron SKM50GB123D. It is a three-leg inverter with two capacitors on the DC side at whose midpoint the neutral connection can be made. More details on the experimental prototype can be found in [
2].
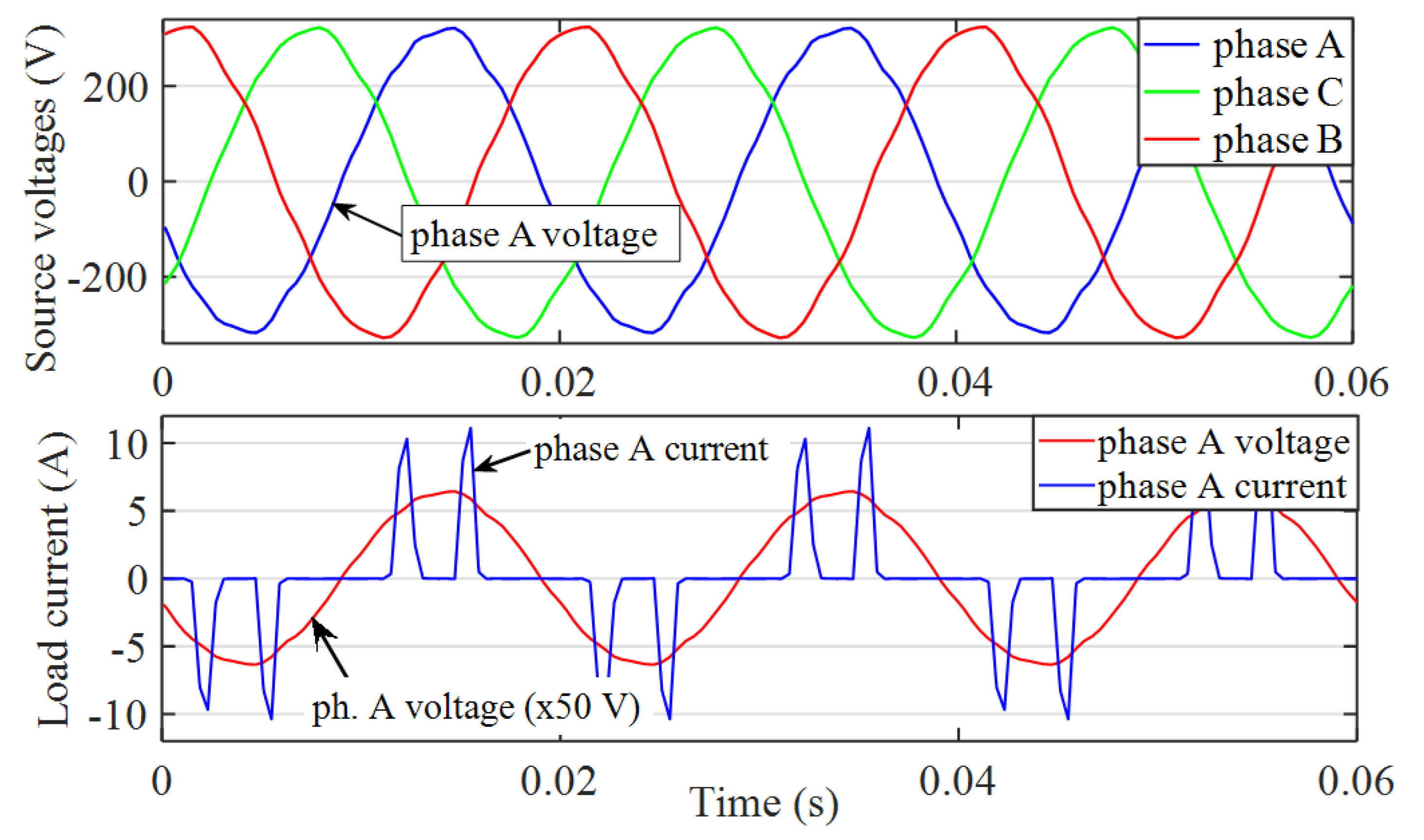
A three-phase diode rectifier with capacitive filtering on the DC side was connected to the 400 V, 50 Hz distribution network (230 V phase voltage). This frequently constitutes the input circuit of a variable speed drive of an asynchronous motor.
Figure 14 shows the phase voltage waveforms of the grid, which present the distortion and unbalance typical of a low voltage supply. It also shows the voltage and current of the load for the same phase (phase
a), where it can be observed the high current distortion corresponding to an
ITHD of 144%.
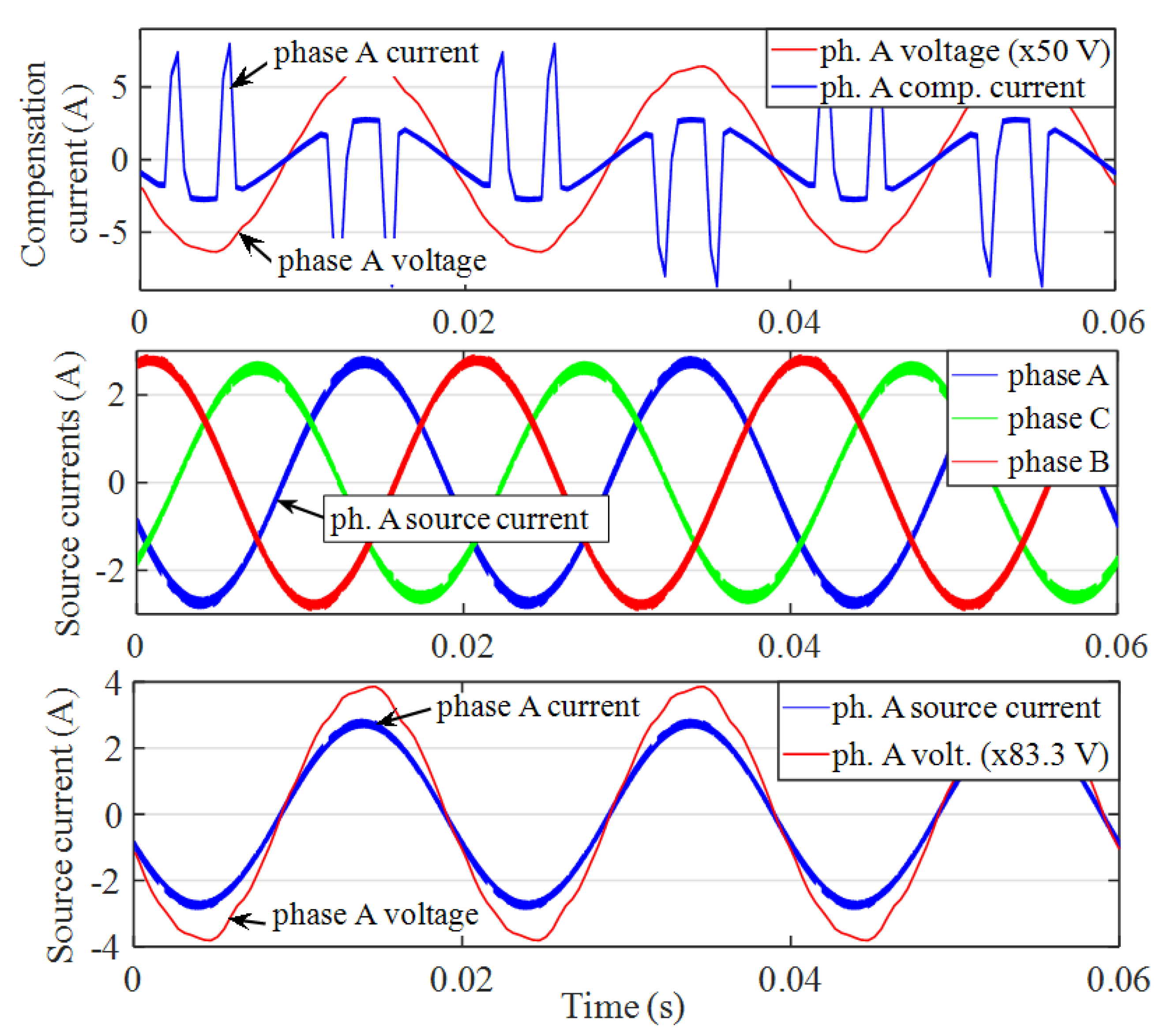
The UpfC strategy was executed on the control card, which has allowed determining the compensation currents.
Figure 15, upper graph, shows the compensation current generated by the ANN control circuit. The middle graph shows the resulting sinusoidal source currents, where the
ITHD value is 3.9%. Finally,
Figure 15, bottom graph, contains the supply voltage and current waveforms in the same phase after compensation. As a result, theses voltages and currents are collinear, reaching a power factor close to unity.
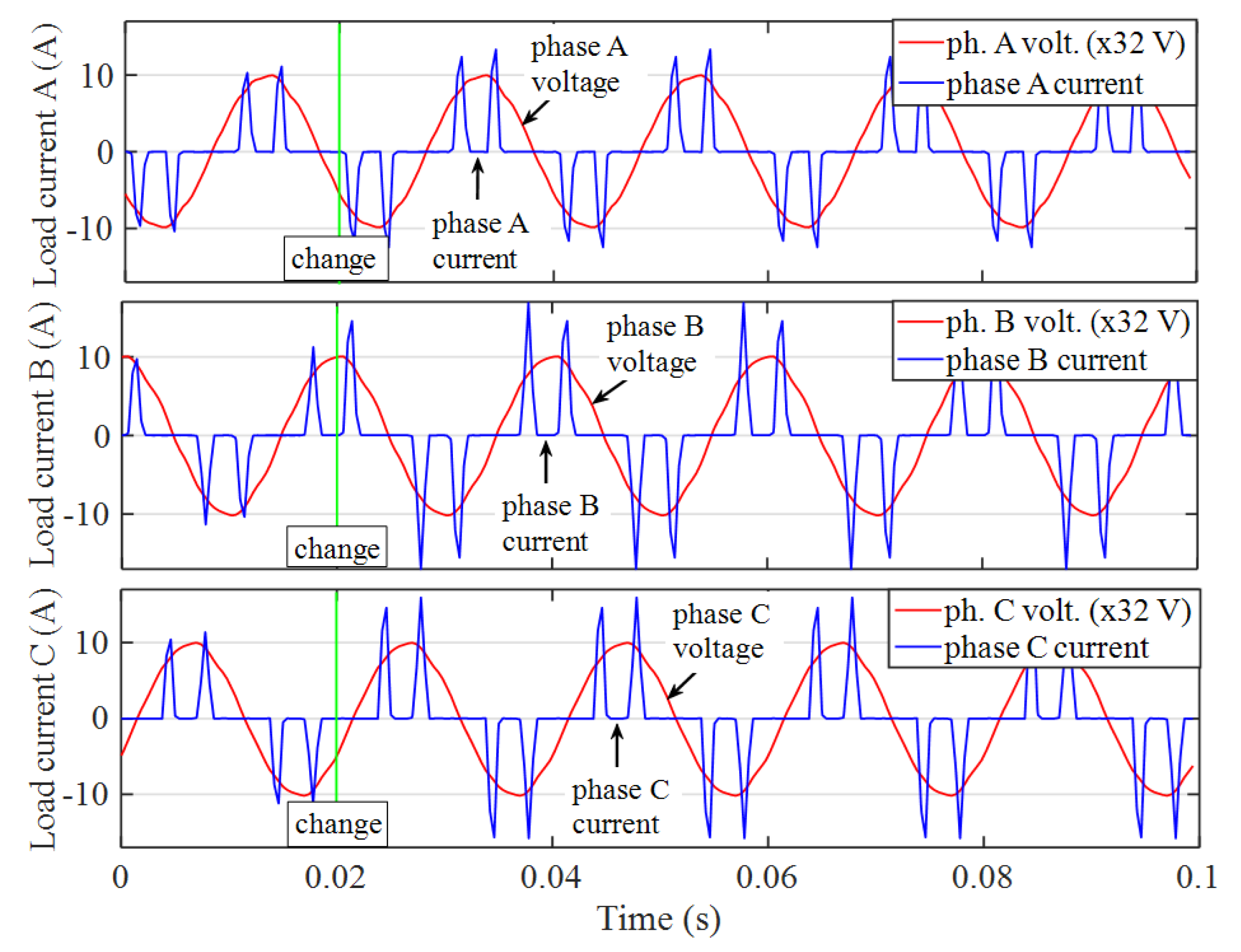
The unbalanced load performance was also tested. According to (8), the UpfC strategy will produce source currents proportional to the source voltages. Therefore, in most real cases, where not much voltage unbalance is present, the compensation will give rise to balanced three-phase source currents.
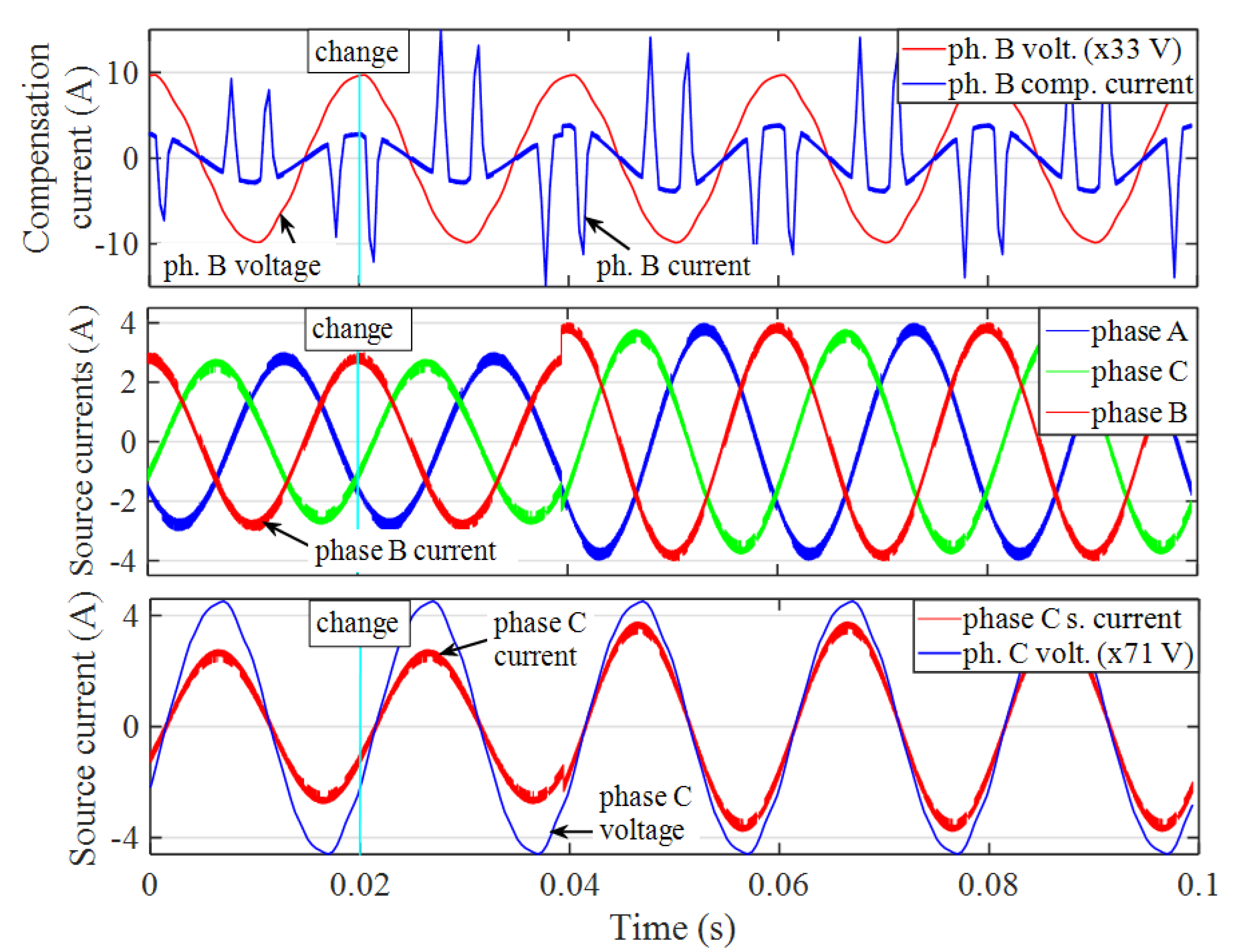
Figure 16 shows a load change from the previous load features to lower impedance values, and different for each phase. Thus, the current amplitudes become higher and show some unbalance. The load
ITHD is over 140% in every phase.
In
Figure 17, the UpfC compensation results are presented. The top graph shows the compensation current in one of the phases. The middle graph shows the sinusoidal source currents, with the correction one cycle after the change, becoming quickly stationary and almost balanced. The slight unbalance that can be appreciated is due to the small voltage unbalance. The source
ITHD values fall into 4.0%, 4.1%, and 3.8% for the phases
a,
b, and
c, respectively. Finally,
Figure 17, bottom graph, contains the supply voltage and current waveforms, which highlights the power factor correction.
After all these tests were carried out, it is important to highlight some relations with the reference works. The source
ITHD values achieved in this work, as in the best of the Adaline or RNN works reviewed, are between 2% and 5%. The
PF reached in these cases is unity. The dynamical performance is as good as in many of the accepted control methods. Lastly, the UpfC control strategy corrects the problem of unbalanced currents, in the case of balanced source voltages.
Table 3 shows a summary of some important features of different ANN-based control methods in the literature included as references in this paper.
In the comparison of some reference works showed in
Table 3, it can be seen that most of the methods achieve an
ITHD value below 5%, recommended by the EN Standard [
42]. Regarding the other features showed in the table, we can affirm that the method proposed in this paper reaches a complete set of requirements.
In future works, this MLP-based control method must be further tested in the experimental platform with different loads and adverse conditions for an in-depth analysis of the performance. Besides, it is important to try to apply new deep learning techniques and other new ANN topologies, maintaining the control strategies and testing platforms for comparison.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}