
Time-Domain Dynamic Modeling and Analysis of Complex Heavy-Duty Gearbox Considering Floating Effect


Abstract
:Featured Application
Abstract
1. Introduction
2. LTC Modeling Approach of Heavy-Duty Gearbox
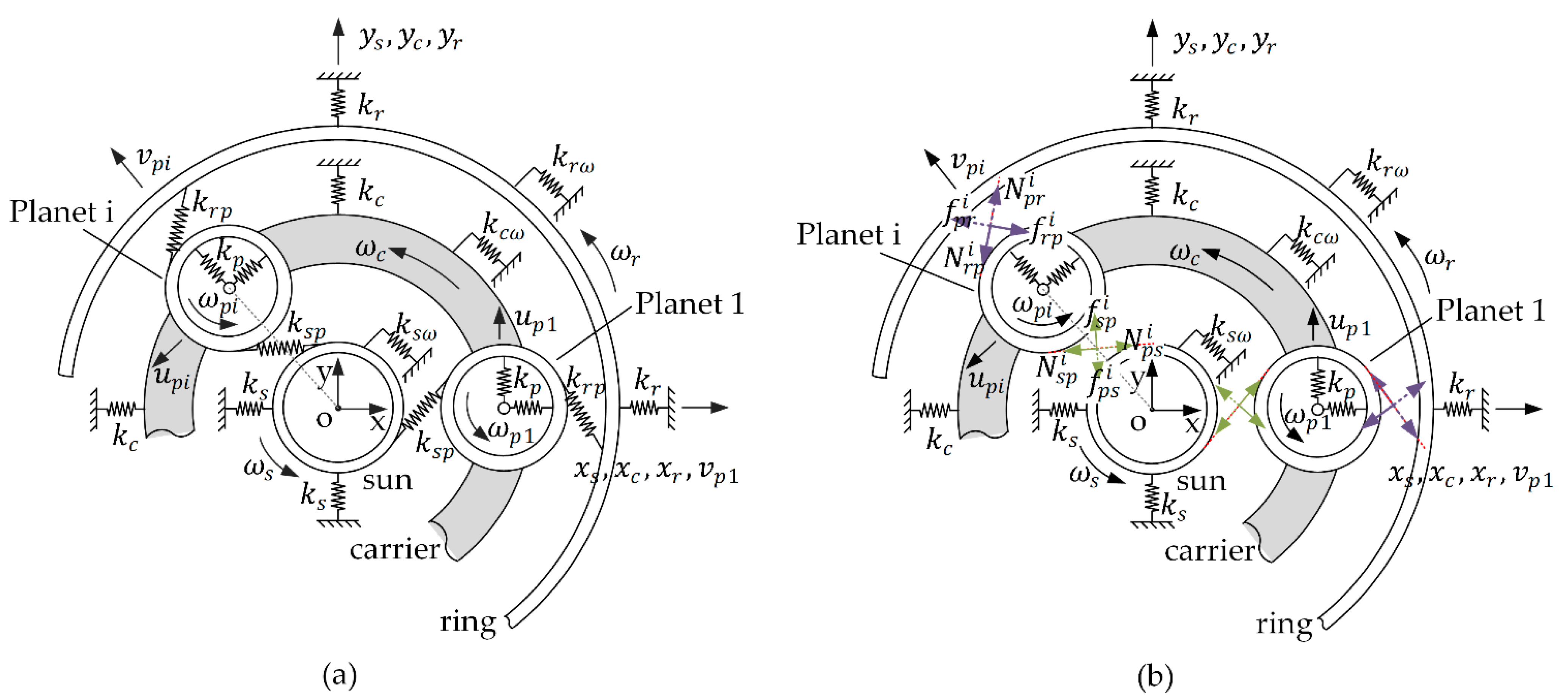
2.1. LTC Models of Planetary Gear Set
2.2. Detailed Formulations
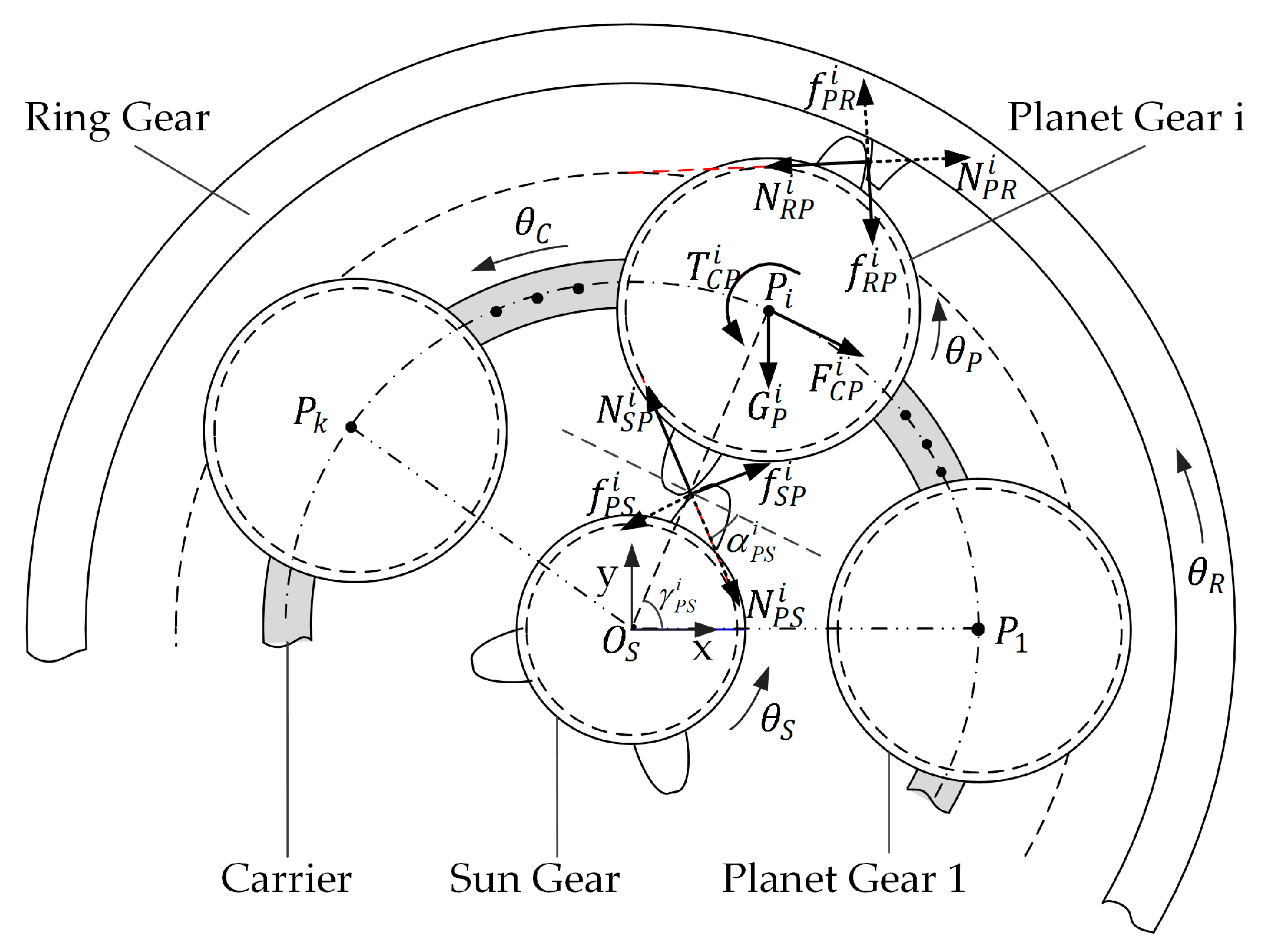
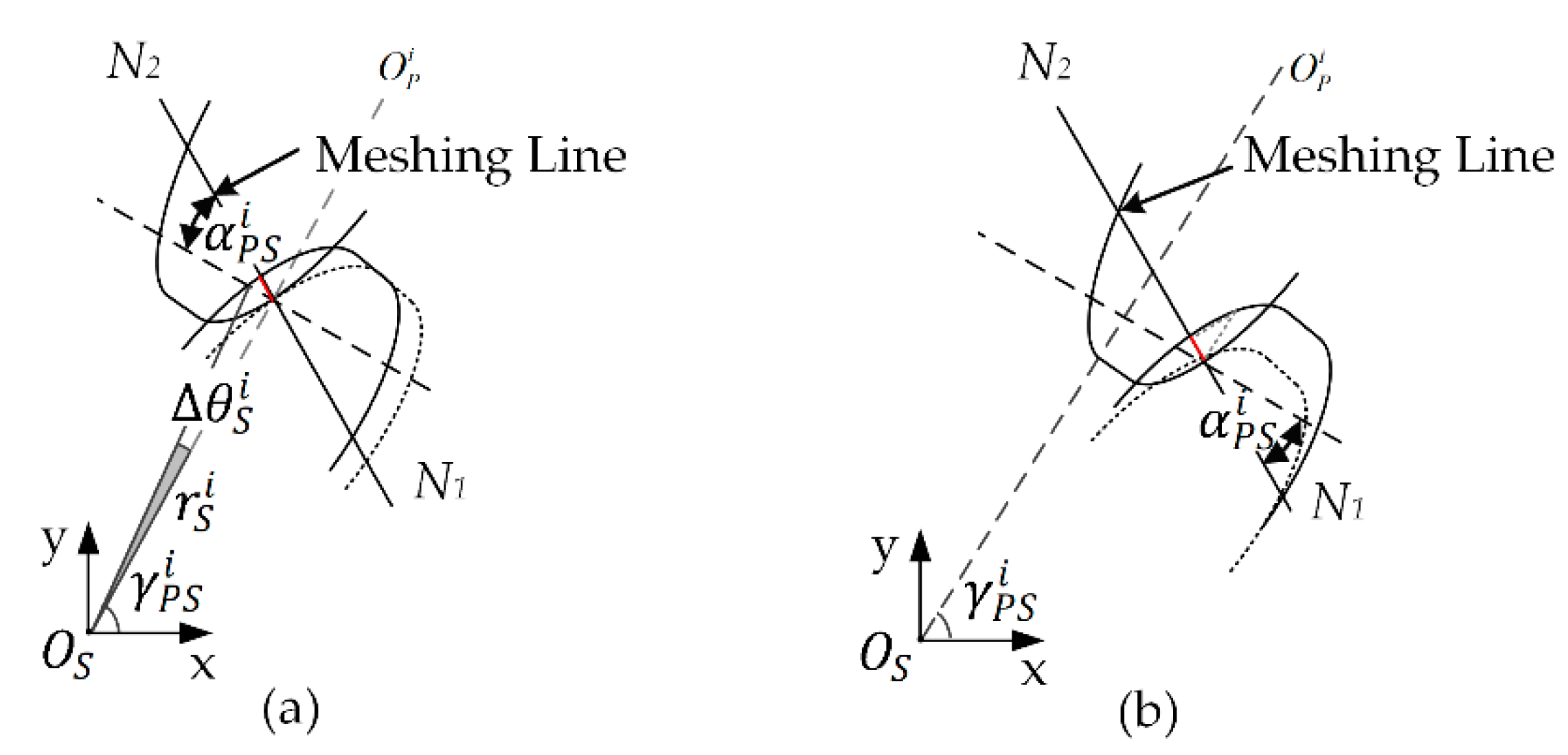
2.2.1. Force Derivation of the Engagement of the Sun and ith Planet Gears
2.2.2. Force Derivation of the Engagement of the Ring and ith Planet Gear
2.2.3. Bearing Force Analysis between Carrier and ith Planet Gear
2.2.4. System Dynamic Equations
3. Dynamic Modeling of a WTG Test Rig
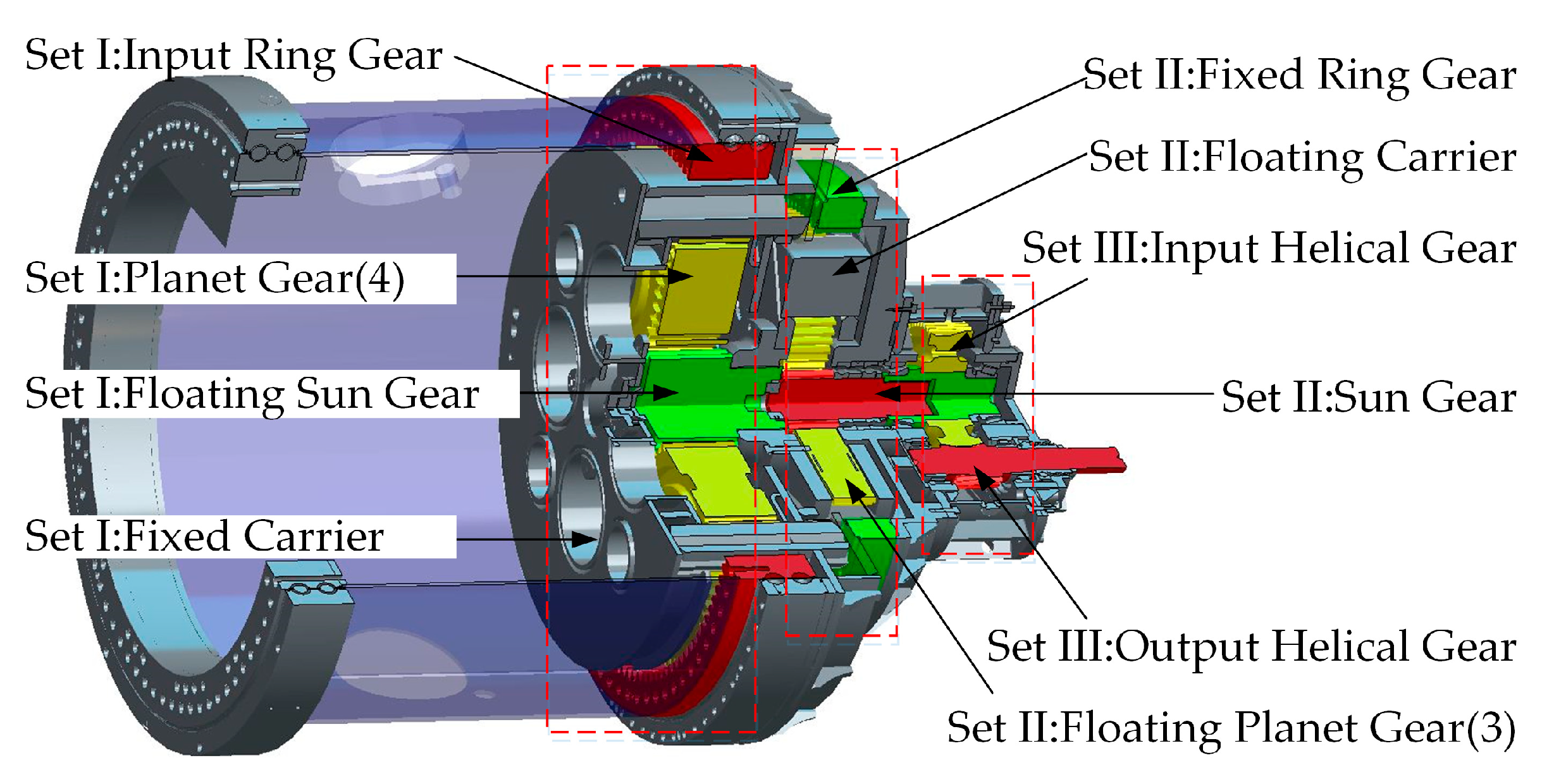
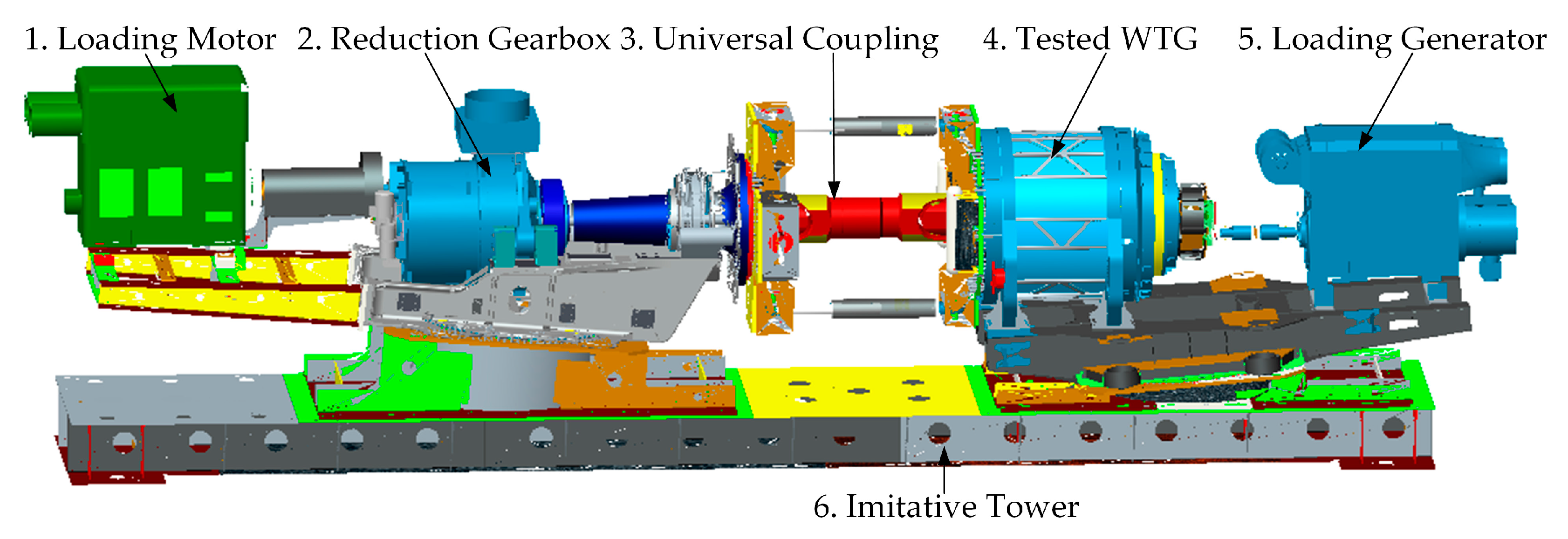
3.1. Structure of the Full Test Rig
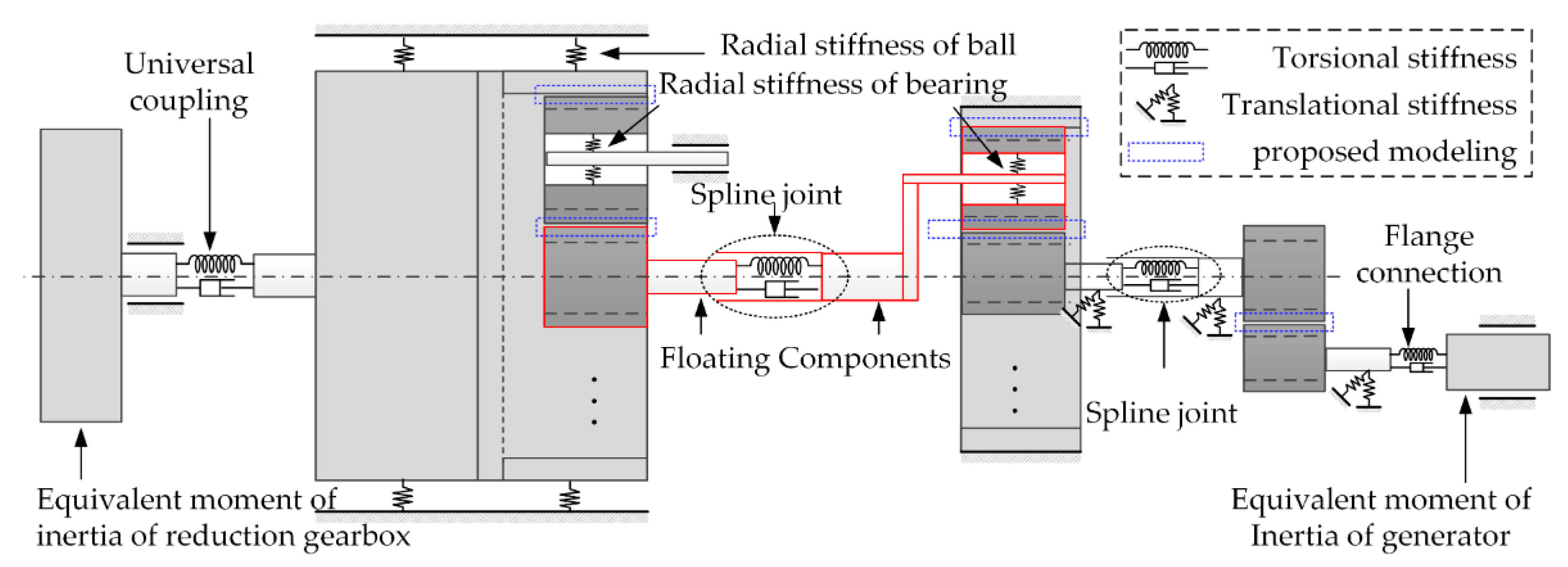
3.2. Dynamic Model of the Full Test Rig
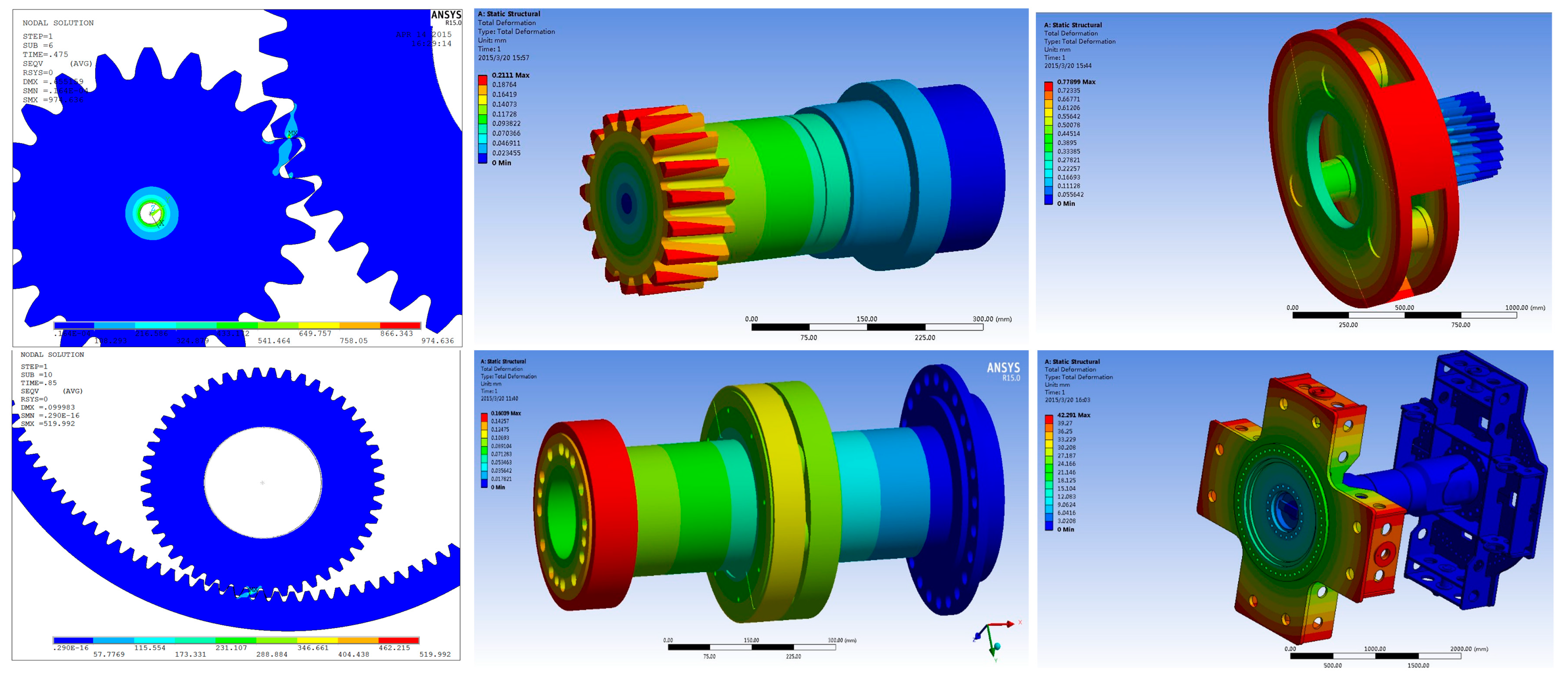
3.3. Parameter Identification of the Dynamic Model
4. Experimental Validation and Dynamic Analysis of the WTG
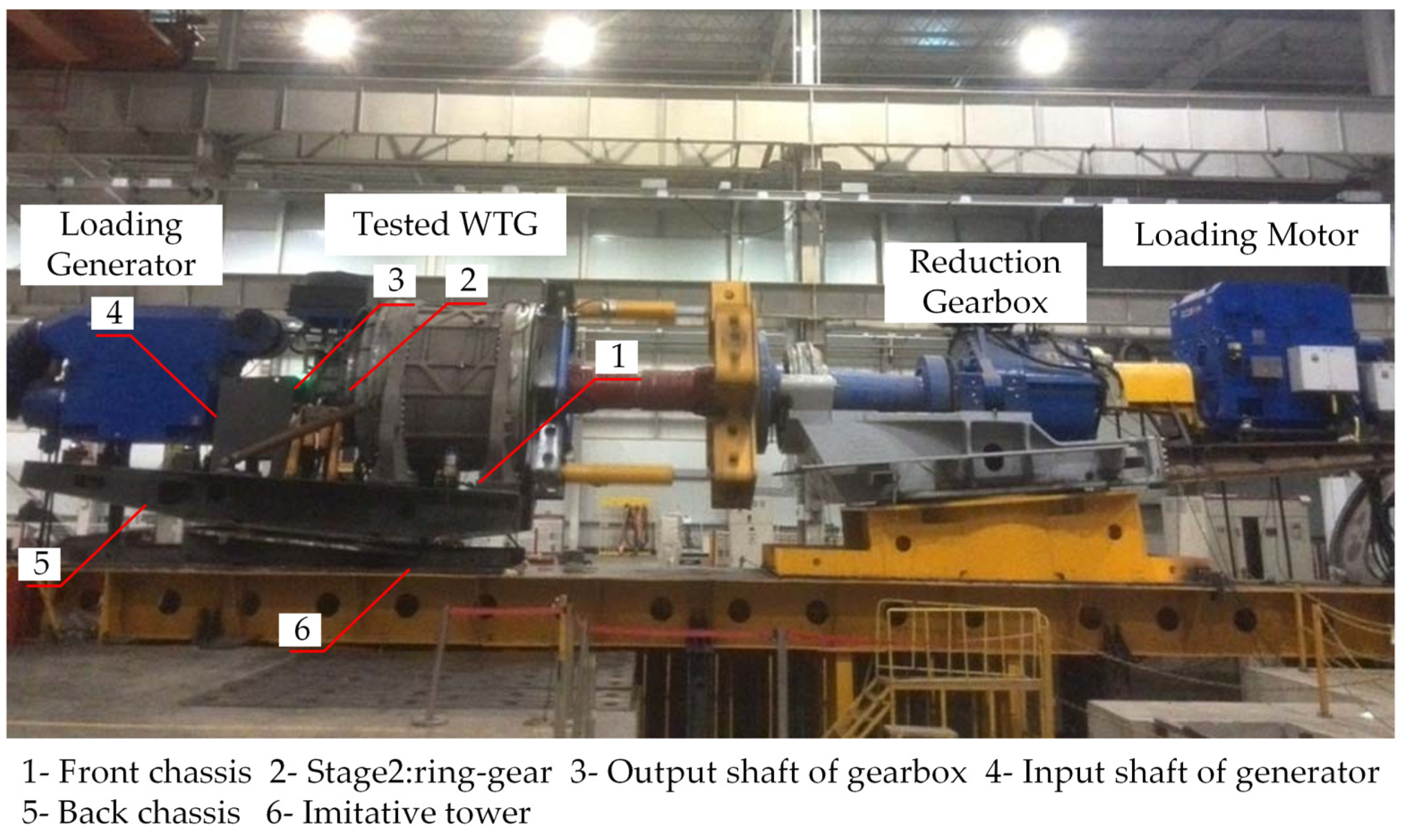
4.1. Configuration of the Full Test Rig
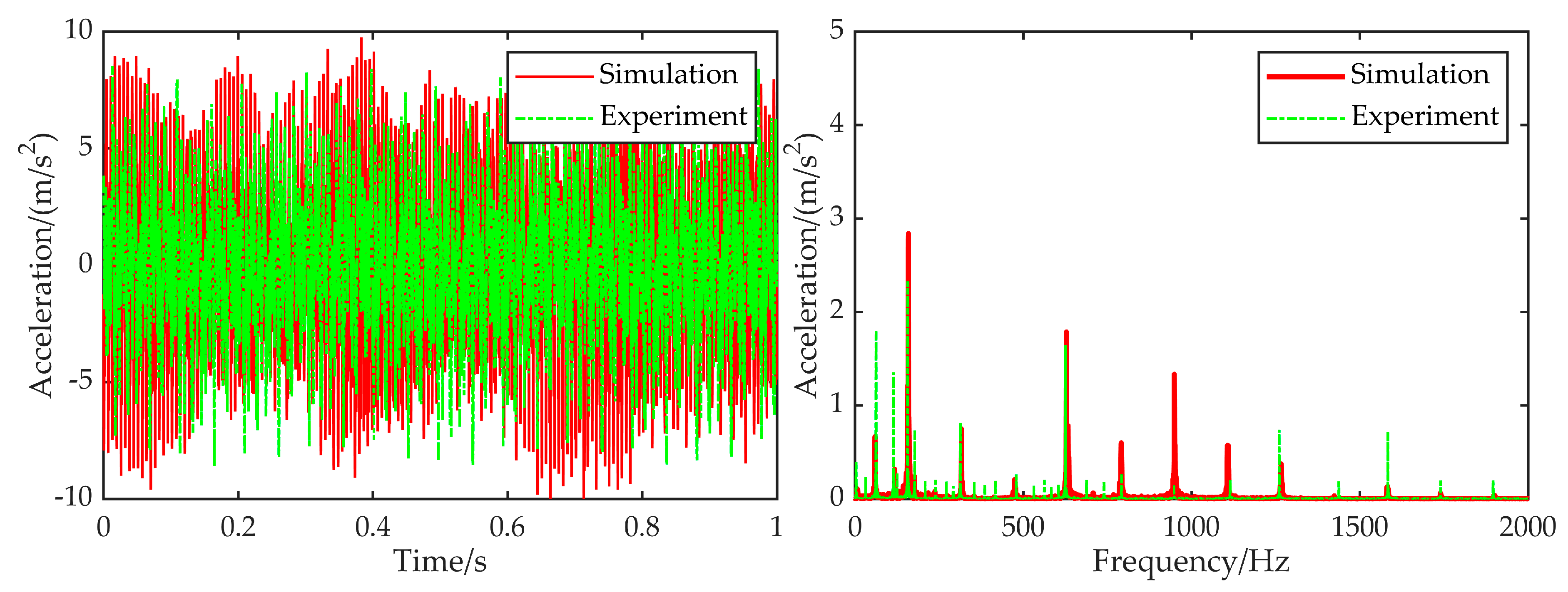
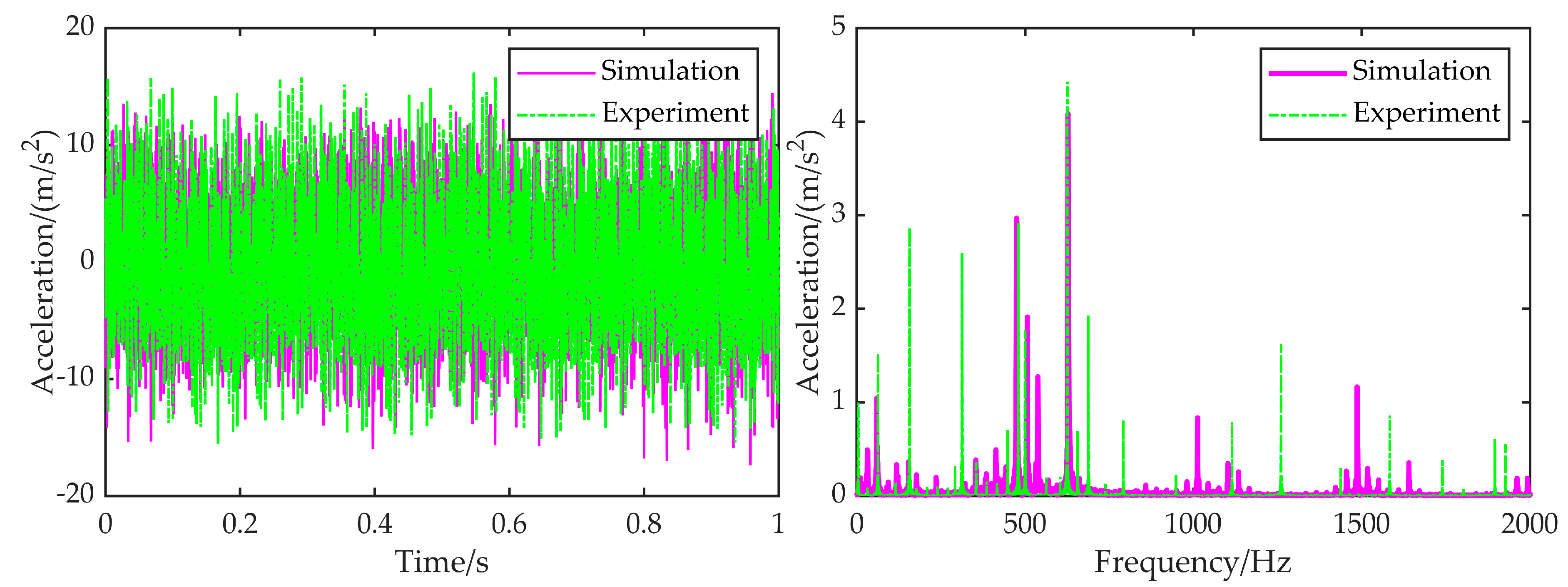
4.2. Comparison of the Simulated and Experimental Results
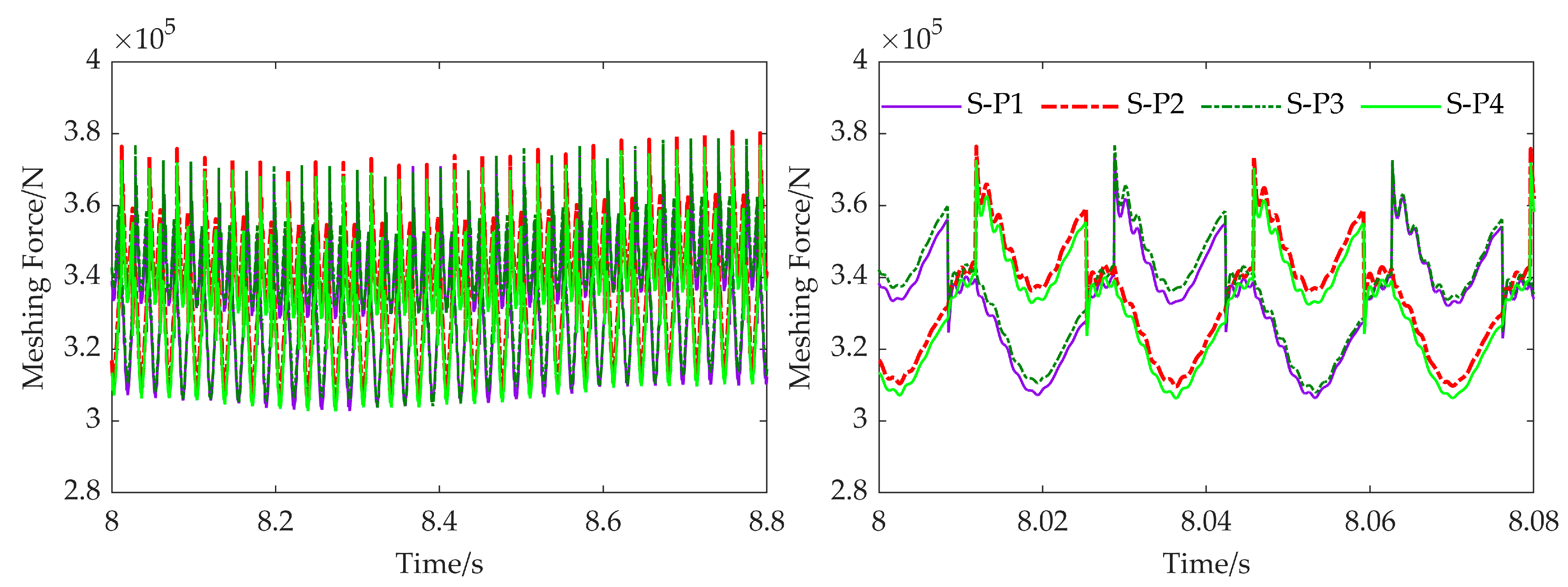
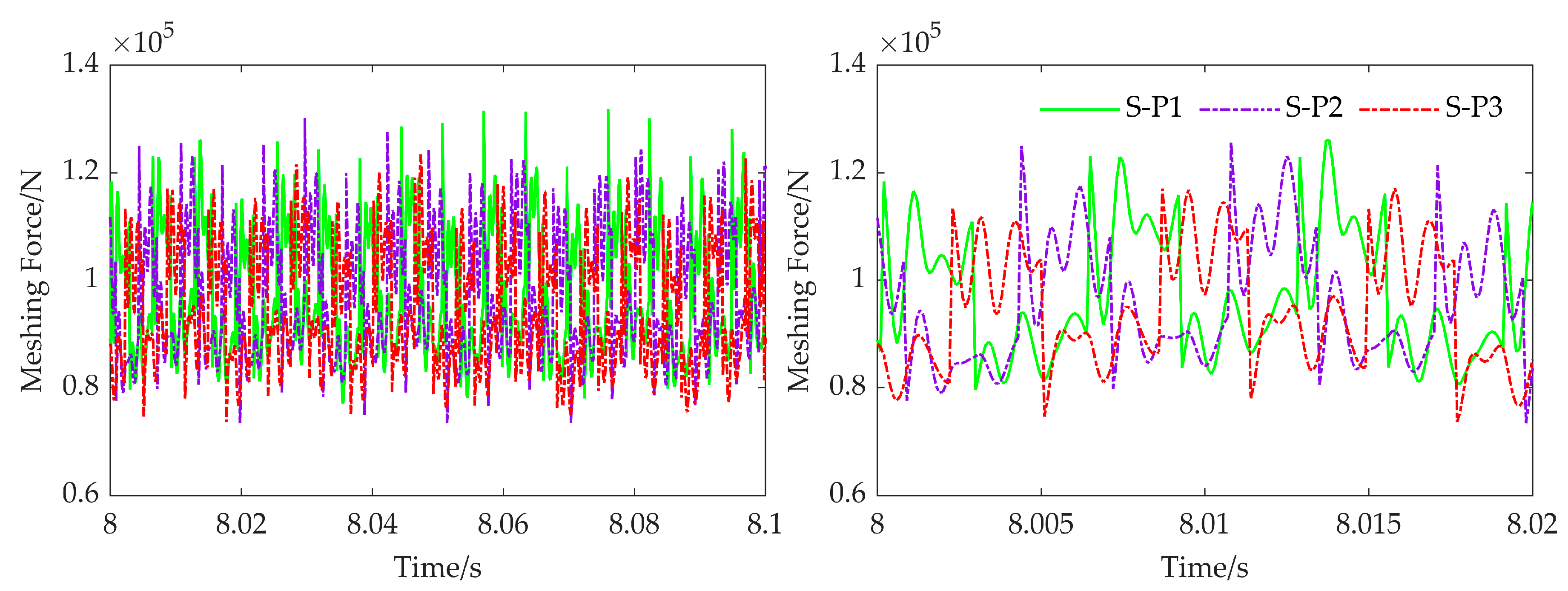
4.3. Time-Domain Dynamic Results of the WTG
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol/Abbreviation | Description |
| LTC | Lateral-torsional coupling (model/modeling) |
| MW | Megawatt |
| WTG | Wind turbine gearbox |
| DOF | Degrees of freedom |
| LSP | Low-speed planetary gear set |
| HSP | High-speed planetary gear set |
| PSH | Parallel-shaft helical gear set |
| FEA | Finite element analysis |
| Translational displacements of the ring gear | |
| Translational displacements of the sun gear | |
| Translational displacements of the carrier | |
| Rotational angles of the ring gear, sun gear and carrier respectively | |
| Translational displacements and rotational angle of the ith planet gear | |
| Normal pressure force and tangential force exerted on the ith planet gear by the ring gear | |
| Normal pressure force and tangential force exerted on the ith planet gear by the sun gear | |
| Reaction force and torque exerted on the ith planet gear by the bearing | |
| Center points of the sun gear, the ith planet gear, and the ring gear respectively | |
| Time-varying position angle between the center connection line and the X axis | |
| Inital position angle between the center connection line and the X axis | |
| Time-varying changing value of position angle | |
| Tooth number of the sun gear, planet gear, and ring gear respectively | |
| Ideal rotational angle of the ith planet gear under | |
| Difference between the ideal and actual rotational angles of the ith planet gear | |
| Linear deformation caused by angle difference | |
| Time-varying center distance between the ith planet gear and the sun gear | |
| Initial center distance between the ith planet gear and the sun gear | |
| Time-varying changing value of center distance | |
| Pitch radius of the ith planet gear while engaged with sun gear | |
| Engagement angle between the ith planet gear and sun gear | |
| Radius of base circle of the planet gear, sun gear and ring gear respectively | |
| Linear deformation caused by variation of center distance | |
| Normal composite deformation between the ith planet and sun gear | |
| Tangent composite deformation between the ith planet and sun gear | |
| Coefficient representing the double pair gear meshing stiffness with respect to single pair gear meshing stiffness | |
| Initial phase angle of the ith planet gear | |
| Phase difference of adjacent planet gears into a single tooth meshing state | |
| Time-varying meshing stiffness of the ith planet gear and sun gear | |
| Angle between the normal force and the X axis | |
| Coulomb friction coefficient of the sun gear and planet gear | |
| Viscous damping coefficient of the sun gear and planet gear | |
| Angle between the tangent friction force and the X axis | |
| Time-varying center distance between the ith planet gear and the ring gear | |
| Time-varying position angle between the center connection line and the X axis | |
| Inital position angle between the center connection line and the X axis | |
| Time-varying changing value of position angle | |
| Ideal rotational angle of the ith planet gear under | |
| Angle difference between the ideal and actual rotational angles of the ith planet gear | |
| Linear deformation caused by angle difference | |
| Time-varying center distance between the ith planet gear and the ring gear | |
| Initial center distance between the ith planet gear and the ring gear | |
| Time-varying changing value of center distance | |
| Pitch radius of the ith planet gear while engaged with ring gear | |
| Engagement angle between the ith planet gear and ring gear | |
| Linear deformation caused by variation of center distance | |
| Normal composite deformation between the ith planet and ring gear | |
| Tangent composite deformation between the ith planet and ring gear | |
| Meshing stiffness of the planet gear and sun gear | |
| Angle between the normal force and the X axis | |
| Coefficient of coulomb friction of the ring gear and planet gear | |
| Viscous damping coefficient of between the ring gear and planet gear | |
| Angle between the tangent friction force and the X axis | |
| Distribution radius of planet gears | |
| Initial distribution angle of the ith planet gear | |
| Deformations of the ith planet relative to the carrier in X and Y directions respectively | |
| Rotational angle of the ith planet relative to the carrier | |
| Translational stiffness of the bearings between carrier and planet gear | |
| Nominal diameter of bearings between carrier and planet gear | |
| Coulomb friction coefficient of the bearings between carrier and planet gear | |
| Viscous damping coefficient of the bearings between carrier and planet gear | |
| Bearing stiffness and rotational viscous damping coefficient of the sun gear bearing | |
| Bearing stiffness and rotational viscous damping coefficient of the ring gear bearing | |
| Mass, inertia and gravity of the sun gear, planet gear, ring gear and carrier respectively | |
| Torques on the sun gear, ring gear and carrier respectively |
References
- Helsen, J.; Vandepitte, D.; Desmet, W. Flexible modelling of wind turbine gearboxes with special focus on shaft flexibilities. In Proceedings of the 10th International Conference on Recent Advances in Structural Dynamics (RASD) 2010, Southampton, UK, 12–14 July 2010. [Google Scholar]
- Tsai, S.; Hwang, G.; Yeh, S. An analytical approach for load sharing analysis of planetary gear drives. In Proceedings of the 13th World Congress in Mechanism and Machine Science, Guanajuato, Mexico, 19–23 June 2011; pp. 19–25. [Google Scholar]
- Leithead, W.; Rogers, M. Drive-train characteristics of constant speed HAWT’s: Part I—Representation by simple dynamic models. Wind Eng. 1996, 20, 149–174. [Google Scholar]
- Sicot, C.; Devinant, P.; Laverne, T.; Loyer, S.; Hureau, J. Experimental study of the effect of turbulence on horizontal axis wind turbine aerodynamics. Wind Energy 2006, 9, 361–370. [Google Scholar] [CrossRef]
- Lee, G.H.; Park, Y.J.; Kim, J.K.; Yim, J.G.; Nam, Y.Y.; Chong, T.H. An optimal design for MW-class wind turbine gearboxes based on their structural characteristics. In Proceedings of the 8th World Wind Energy Conference and Exhibition 2009, Jeju, Korea, 23–25 June 2009; pp. 101–109. [Google Scholar]
- Krouse, J. Wind turbine gearbox vibaration. Power Eng. 2009, 113, 16–17. [Google Scholar]
- Spinato, F.; Tavner, P.J.; van Bussel, G.J.W.; Koutoulakos, E. Reliability of wind turbine subassemblies. IET Renew. Power Gener. 2009, 3, 387–401. [Google Scholar] [CrossRef] [Green Version]
- Abderrazzaq, M.A.; Hahn, B. Analysis of the turbine standstill for a grid connected wind farm (case study). Renew. Energy 2006, 31, 89–104. [Google Scholar] [CrossRef]
- Liang, X.H.; Zuo, M.J.; Hoseini, M.R. Vibration signal modeling of a planetary gear set for tooth crack detection. Eng. Fail. Anal. 2015, 48, 185–200. [Google Scholar] [CrossRef]
- Li, M.; Xie, L.; Ding, L. Load sharing analysis and reliability prediction for planetary gear train of helicopter. Mech. Mach. Theory 2017, 115, 97–113. [Google Scholar] [CrossRef]
- Kahraman, A. Load sharing characteristics of planetary transmissions. Mech. Mach. Theory 1994, 29, 1151–1165. [Google Scholar] [CrossRef]
- Lin, J.; Parker, R.G. Analytical characterization of the unique properties of planetary gear free vibration. J. Vib. Acoust. 1999, 121, 316–321. [Google Scholar] [CrossRef]
- Abousleiman, V.; Velex, P. A hybrid 3D finite element/lumped parameter model for quasi-static and dynamic analyses of planetary/epicyclic gear sets. Mech. Mach. Theory 2006, 41, 725–748. [Google Scholar] [CrossRef]
- Abousleiman, V.; Velex, P.; Becquerelle, S. Modeling of spur and helical gear planetary drives with flexible ring gears and planet carriers. J. Mech. Des. 2007, 129, 95–106. [Google Scholar] [CrossRef]
- Chen, Z.G.; Shao, Y.M. Dynamic simulation of planetary gear with tooth root crack in ring gear. Eng. Fail. Anal. 2013, 31, 8–18. [Google Scholar] [CrossRef]
- Cooley, C.G.; Parker, R.G.; Vijayakar, S.M. A frequency domain finite element approach for three-dimensional gear dynamics. J. Vib. Acoust. 2011, 133, 041004. [Google Scholar] [CrossRef]
- Maláková, S.; Puškár, M.; Frankovský, P.; Sivák, S.; Palko, M.; Palko, M. Meshing Stiffness—A Parameter Affecting the Emission of Gearboxes. Appl. Sci. 2020, 10, 8678. [Google Scholar] [CrossRef]
- Maláková, S.; Urbanský, M.; Fedorko, G.; Molnár, V.; Sivak, S. Design of Geometrical Parameters and Kinematical Characteristics of a Non-circular Gear Transmission for Given Parameters. Appl. Sci. 2021, 11, 1000. [Google Scholar] [CrossRef]
- Girsang, I.P.; Dhupia, J.S.; Muljadi, E.; Singh, M.; Pao, L.Y. Gearbox and Drivetrain Models to Study Dynamic Effects of Modern Wind Turbines. IEEE Trans. Ind. Appl. 2014, 50, 3777–3786. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST User’s Guide; Technical Report No NREL/EL-500-38230 2005; National Renewable Energy Laboratory: Golden, CO, USA, 2005. [Google Scholar]
- Zhu, C.; Xu, X.; Lim, T.C.; Du, X.; Liu, M. Effect of flexible pin on the dynamic behaviors of wind turbine planetary gear drives. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 227, 74–86. [Google Scholar] [CrossRef]
- Shenglin, Z.; Caichao, Z.; Chaosheng, S.; Jianjun, T.; Xu, C. Natural characteristic analysis of wind turbine drivetrain considering flexible supporting. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 232, 1–15. [Google Scholar] [CrossRef]
- Park, Y.J.; Lee, G.H.; Song, J.S.; Nam, Y.Y. Characteristic Analysis of Wind Turbine Gearbox Considering Non-Torque Loading. J. Mech. Des. 2013, 135, 044501. [Google Scholar] [CrossRef]
- Qin, D.T.; Song, C.S.; Lu, B.; Song, C.S.; Qin, D.T. Dynamic analysis of a heavy duty marine gearbox with gear mesh coupling. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 2531–2547. [Google Scholar]
- Liu, L.; Liang, X.; Zuo, M.J. Vibration signal modeling of a planetary gear set with transmission path effect analysis. Measurement 2016, 85, 20–31. [Google Scholar] [CrossRef]
- Cooley, C.G.; Parker, R.G. A Review of Planetary and Epicyclic Gear Dynamics and Vibrations Research. Appl. Mech. Rev. 2014, 66, 040804. [Google Scholar] [CrossRef]
- Guo, Y.; Keller, J.; Parker, R.G. Nonlinear dynamics and stability of wind turbine planetary gear sets under gravity effects. Eur. J. Mech. A Solids 2014, 47, 45–57. [Google Scholar] [CrossRef]
- Chen, Z.G.; Zhu, Z.F.; Shao, Y.M. Fault feature analysis of planetary gear system with tooth root crack and flexible ring gear rim. Eng. Fail. Anal. 2015, 49, 92–103. [Google Scholar] [CrossRef]
- Jiang, F.; Ding, K.; He, G.; Sun, Y.; Wang, L. Vibration fault features of planetary gear train with cracks under time-varying flexible transfer functions. Mech. Mach. Theory 2021, 158, 104237. [Google Scholar] [CrossRef]
- Wang, C.; Parker, R.G. Dynamic modeling and mesh phasing-based spectral analysis of quasi-static deformations of spinning planetary gears with a deformable ring. Mech. Syst. Signal Process. 2020, 136, 106497. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Existing Method | Proposed Method |
|---|---|---|
| Frequency-domain behavior | √ | √ |
| Transient time-domain behavior | √ | √ |
| Continuous time-domain behavior | × | √ |
| Items | Ring Tooth Number | Planet Tooth Number | Sun Tooth Number | Module | Tooth Profile Angle |
|---|---|---|---|---|---|
| LSP | 118 | 48 | 22 | 16 | 20° |
| HSP | 118 | 50 | 17 | 12 | 20° |
| Item | Input Tooth Number | Output Tooth Number | Helical Angle | Module | Tooth Profile Angle |
|---|---|---|---|---|---|
| PSH | 59 | 21 | 8° | 9 | 20° |
| Position | Service Load (×105 N) | Torsional Stiffness (×108 N·m/rad) | Variable Stiffness Coefficient | |
|---|---|---|---|---|
| Single Pair | Double Pair | |||
| LSP: sun–planet | 3.55 | 1.54 | 1.69 | 1.10 |
| LSP: planet–ring | 3.55 | 8.78 | 8.94 | 1.01 |
| HSP: sun–planet | 1.04 | 1.75 | 2.45 | 1.40 |
| HSP: planet–ring | 1.03 | 3.20 | 3.25 | 1.00 |
| PSH: input–output | 1.17 | 0.96 | 1.01 | 1.05 |
| Position | Service Load (×104 N·m) | Torsional Stiffness (×108 N·m/rad) |
|---|---|---|
| Wind input–input shaft | 127 | 0.49 |
| LSP sun–HSP carrier | 23.9 | 1.81 |
| HSP sun–PSH input | 2.99 | 0.17 |
| PSH output–output shaft | 1.06 | 0.055 |
| Output shaft–generator | 1.06 | 0.45 |
| Bearing Position | Service Load (×105 N) | Bearing Stiffness (×109 N/m) |
|---|---|---|
| LSP: planet bearing | 6.68 | 5.02 |
| HSP: planet bearing | 1.94 | 4.20 |
| HSP: sun bearing | 0.115 | 2.60 |
| PSH: input bearing 1 | 0.58 | 3.46 |
| PSH: input bearing 2 | 0.58 | 3.60 |
| PSH: output bearing 1 | 0.58 | 2.70 |
| PSH: output bearing 2 | 0.58 | 0.43 |
| Position | Rotating Speed (r/min) | Tooth Number | Theoretical Meshing Frequency (Hz) |
|---|---|---|---|
| LSP: ring | 15 | 118 | 29.5 |
| LSP: planet | 36.87 | 48 | 29.5 |
| LSP: sun | 80.45 | 22 | 29.5 |
| HSP: planet | 189.84 | 50 | 158.2 |
| HSP: sun | 638.82 | 17 | 158.2 |
| PSH: input | 638.82 | 59 | 628.3 |
| PSH: output | 1794.75 | 21 | 628.3 |
| Measured Position | Measured Acceleration Frequency (Hz) | Simulated Position | Simulated Acceleration Frequency (Hz) |
|---|---|---|---|
| Front chassis | 62.5, 114.4,156.3, 312.5, 625 | LSP: bearing | 59.2, 158.7, 316.2, 628.1 |
| HSP:ring gear | 62.5, 312.5, 479.1, 625 | HSP: ring gear | 59.2, 316.5, 474.4, 628 |
| Output shaft | 62.5, 156.3, 312.5, 479.1, 500.2, 625 | PSH: input bearing & HSP: output bearing | 29.5, 158.7, 316.2, 413.2, 474.4, 506.6, 537.3, 628.1 |
| Back chassis | 62.5, 312.5, 416.6, 479.1, 541.7, 625 | ||
| Input of generator | 31, 312.5, 625 |
| Position | Load Fluctuation (×105 N) | Dynamic Loading Factor |
|---|---|---|
| LSP: planet–sun | 3.34 ± 0.39 | 1.118 |
| LSP: planet–ring | 3.55 ± 0.47 | 1.134 |
| HSP: planet–sun | 0.97 ± 0.36 | 1.373 |
| HSP: planet–ring | 0.98 ± 0.34 | 1.349 |
| PSH: input–output | 1.09 ± 0.29 | 1.268 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Zhou, Y.; Jiang, W.; Chen, X. Time-Domain Dynamic Modeling and Analysis of Complex Heavy-Duty Gearbox Considering Floating Effect. Appl. Sci. 2021, 11, 6876. https://doi.org/10.3390/app11156876
Wu J, Zhou Y, Jiang W, Chen X. Time-Domain Dynamic Modeling and Analysis of Complex Heavy-Duty Gearbox Considering Floating Effect. Applied Sciences. 2021; 11(15):6876. https://doi.org/10.3390/app11156876
Chicago/Turabian StyleWu, Jiulin, Yifan Zhou, Wei Jiang, and Xuedong Chen. 2021. "Time-Domain Dynamic Modeling and Analysis of Complex Heavy-Duty Gearbox Considering Floating Effect" Applied Sciences 11, no. 15: 6876. https://doi.org/10.3390/app11156876