
LAMDA Controller Applied to the Trajectory Tracking of an Aerial Manipulator


 and
and 
Abstract
:1. Introduction
- The originality of this article lies in the validation of the robust LAMDA controller in aerial robotic systems whose dynamics are partially known or inaccurate. The main features of the proposed method are the following:
- The controller is based on concepts derived from LAMDA theory: Classes or functional states have a number of fixed layers (intrinsic feature). Therefore, the design is more straightforward than methods where the number of internal layers must be calibrated.
- The proposed controller uses the class criteria, which allows a quick convergence on the desired output without requiring a learning method that increases computational time.
- The design of a controller where the continuous and discontinuous control actions of SMC schemes are computed using the LAMDA method.
- A comparative analysis between the LAMDA method that does not use the aerial manipulator robot model is carried out with other well-known controller, which depend on model. Thus, obtaining a good performance of the controller without considering of the dynamics system.
2. Aerial Manipulator Robot Model
2.1. Kinematic Model
2.2. Dynamic Model
3. Proposed Controllers
3.1. Kinematic Controller
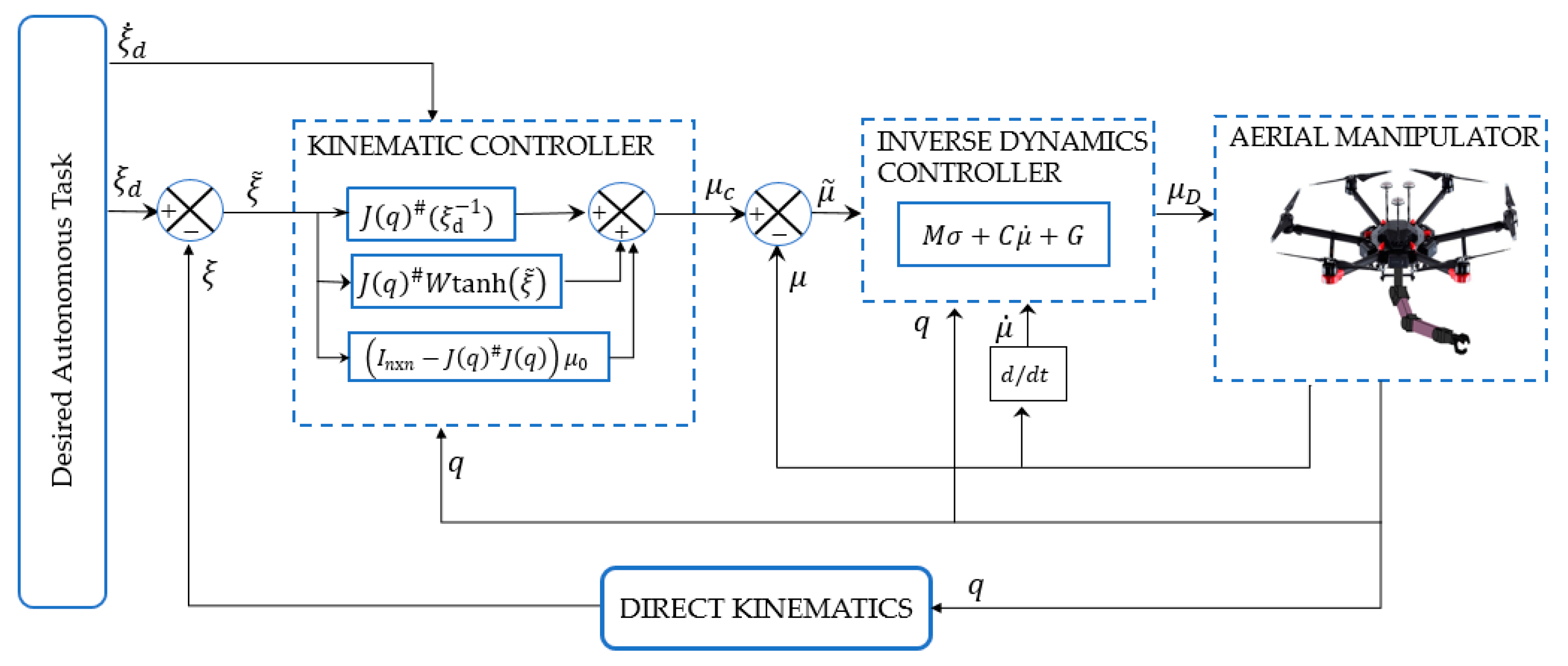
3.2. Inverse Dynamics Controller
3.3. Sliding Mode Controller (SMC)
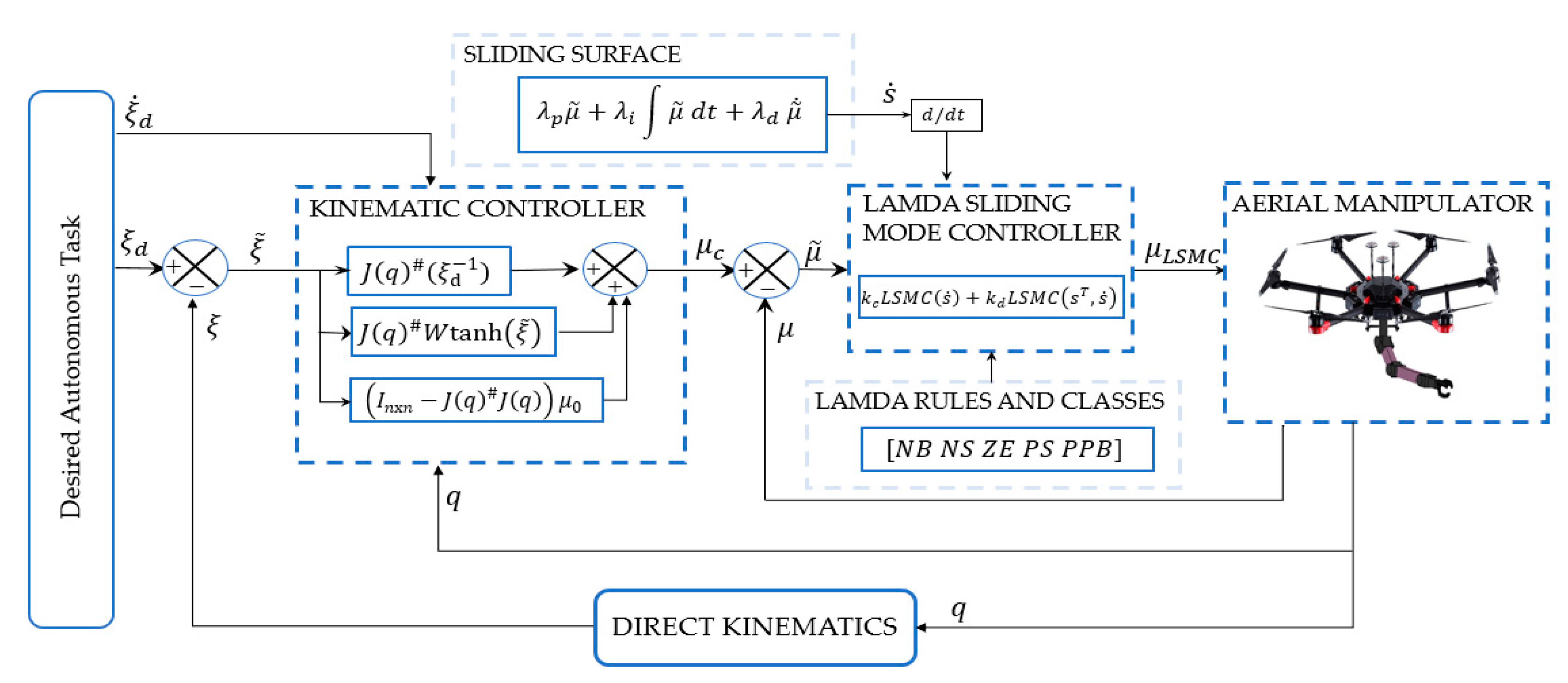
3.4. LAMDA Controller
4. Experimental Results
4.1. Experiment 1: Kinematic Controller
4.2. Experiment 2: Inverse Dynamics Controller
4.3. Experiment 3: SMC Controller
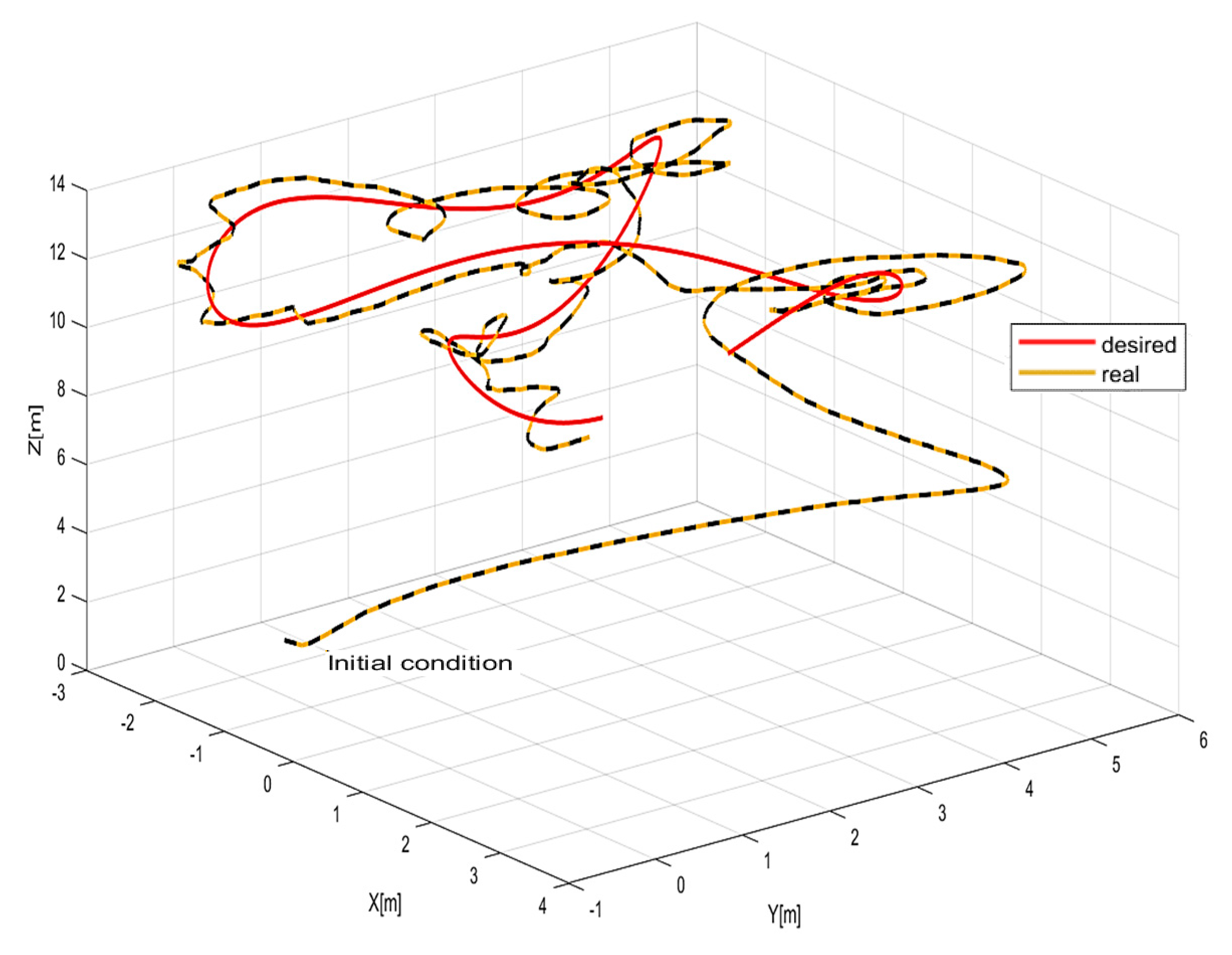
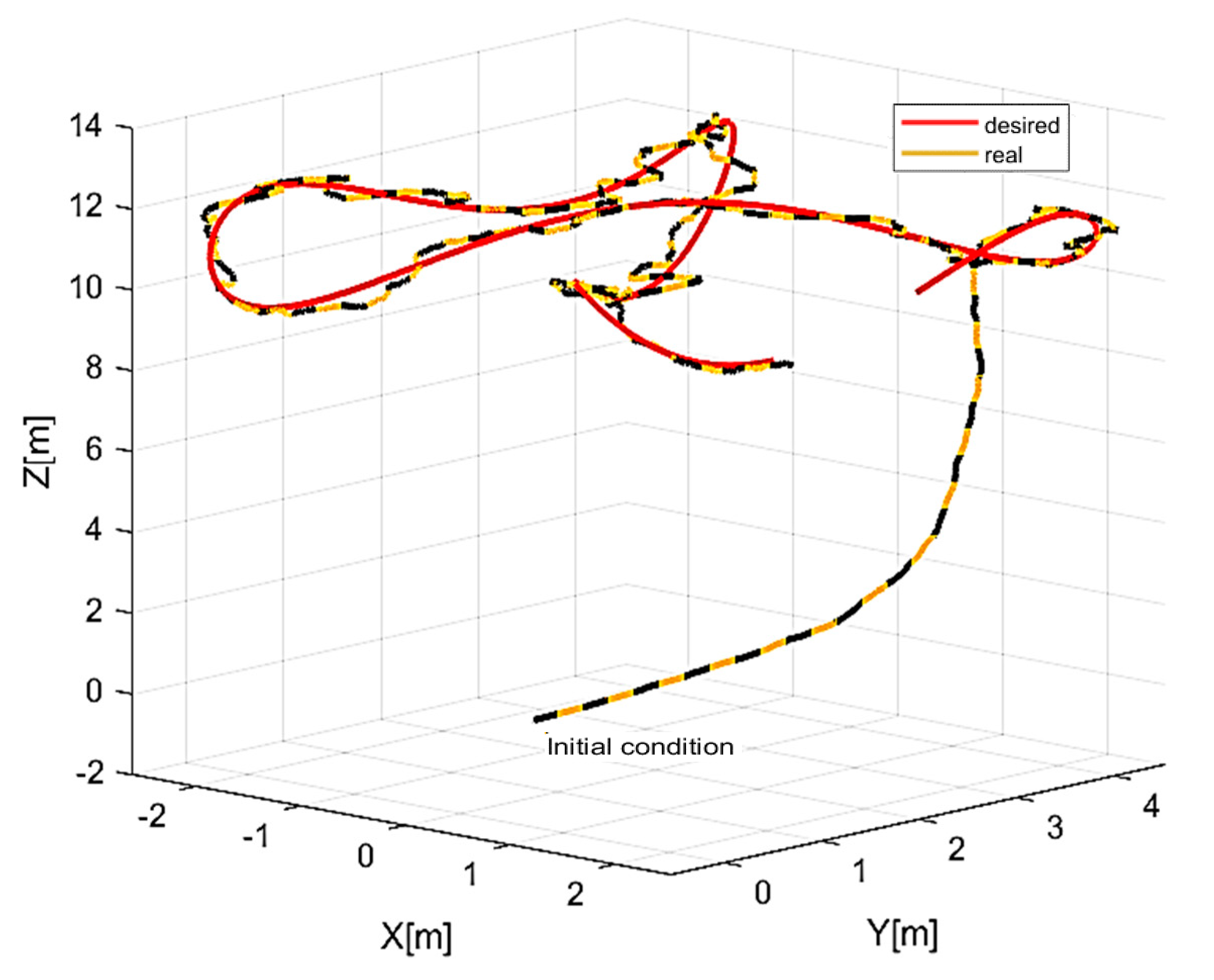
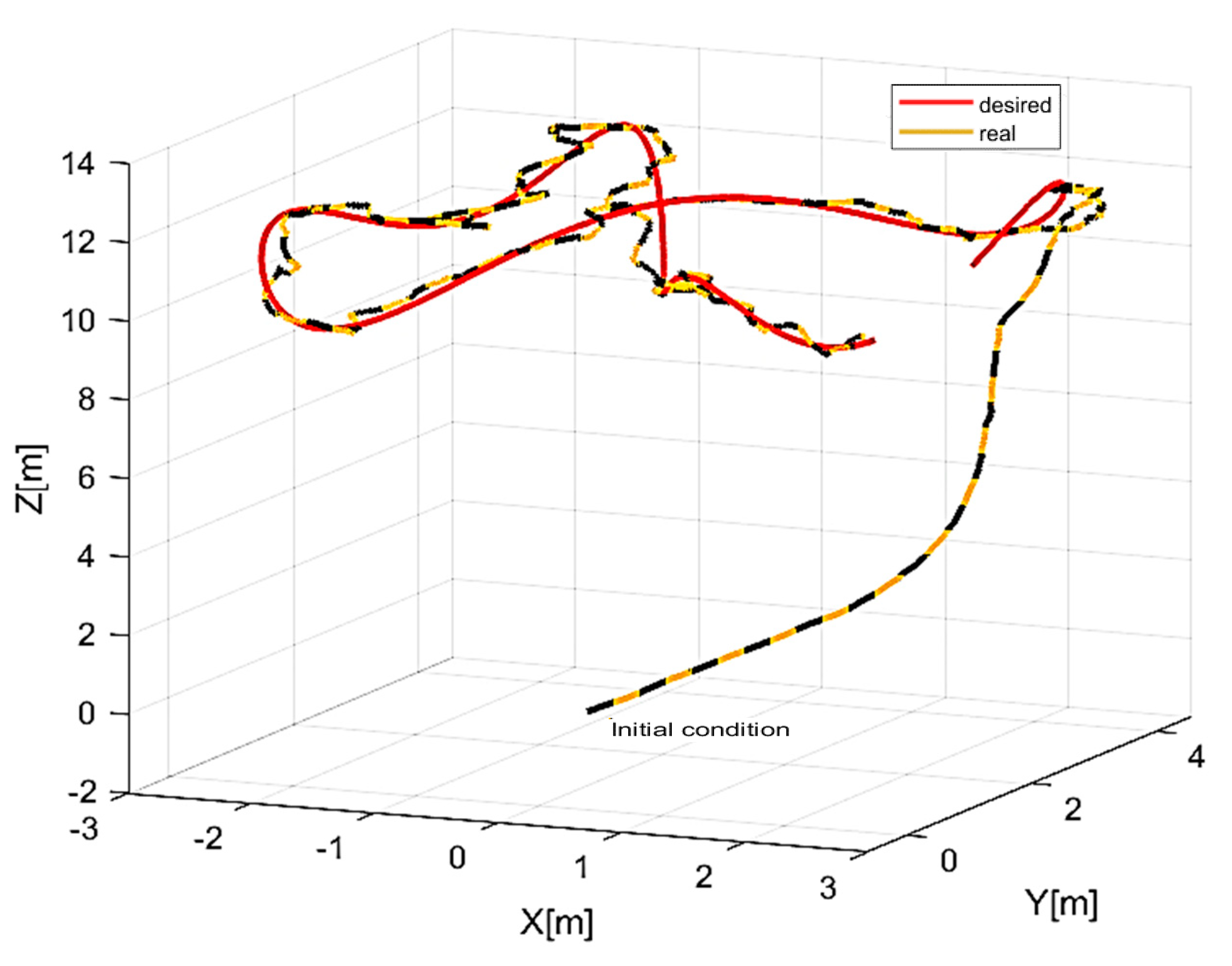
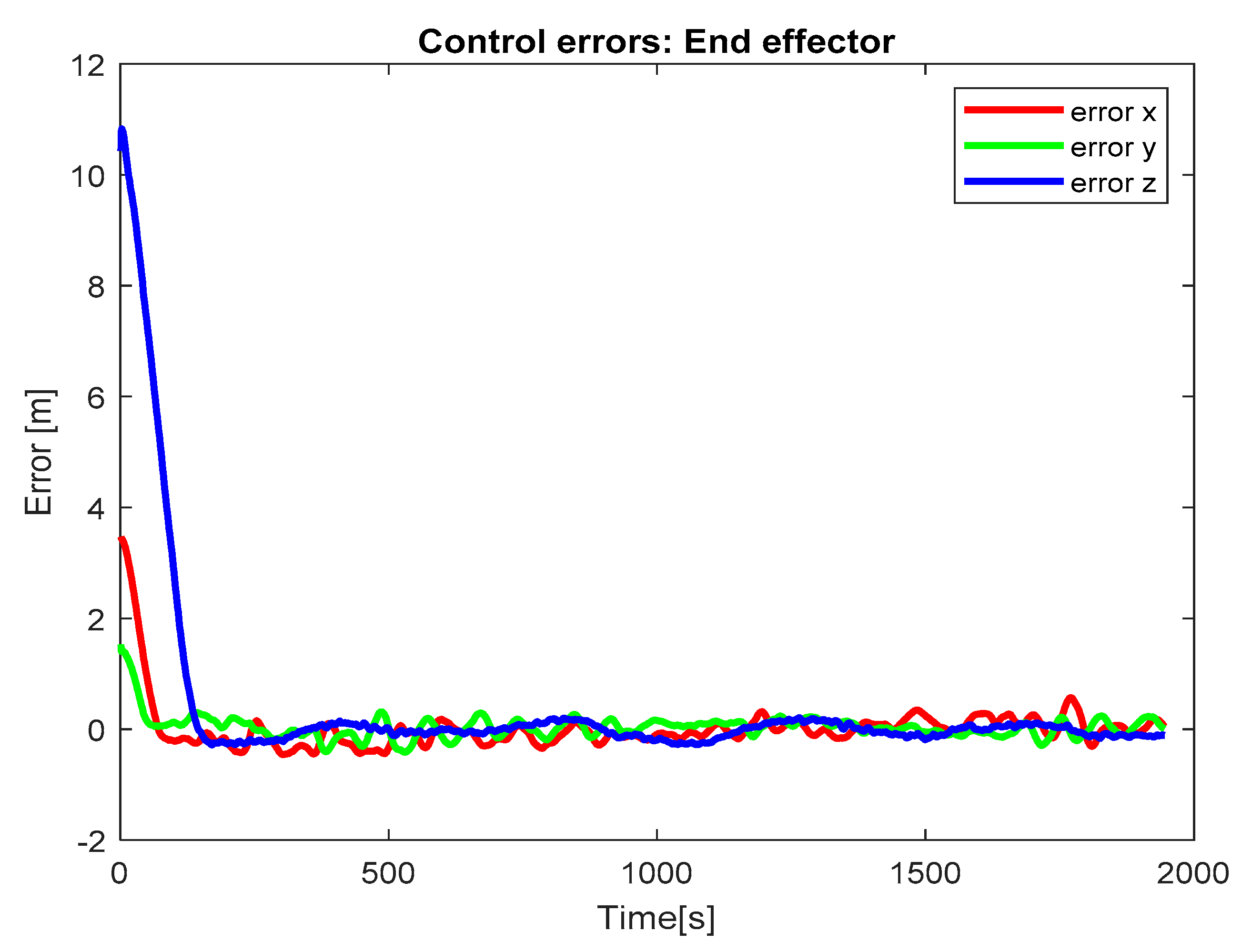
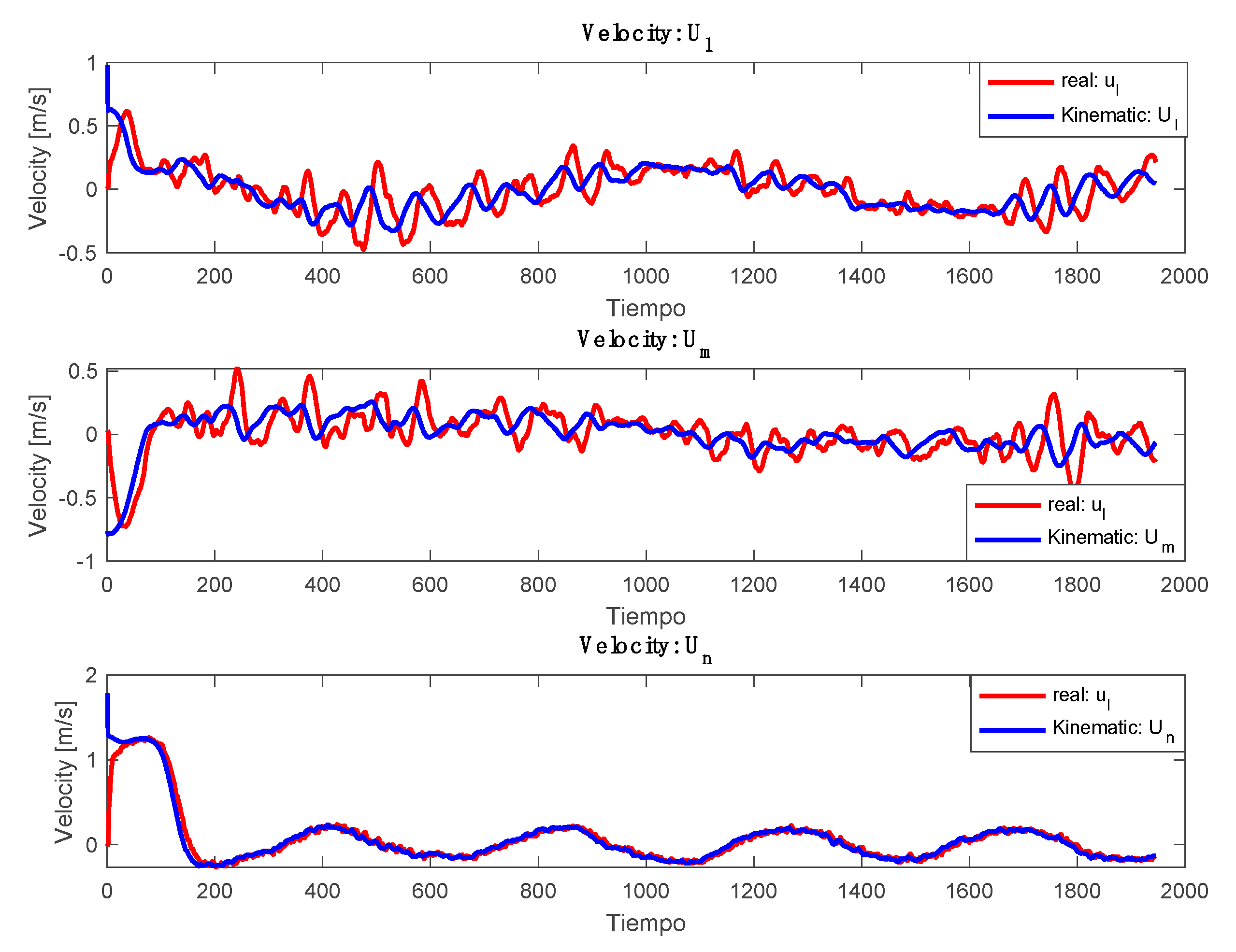
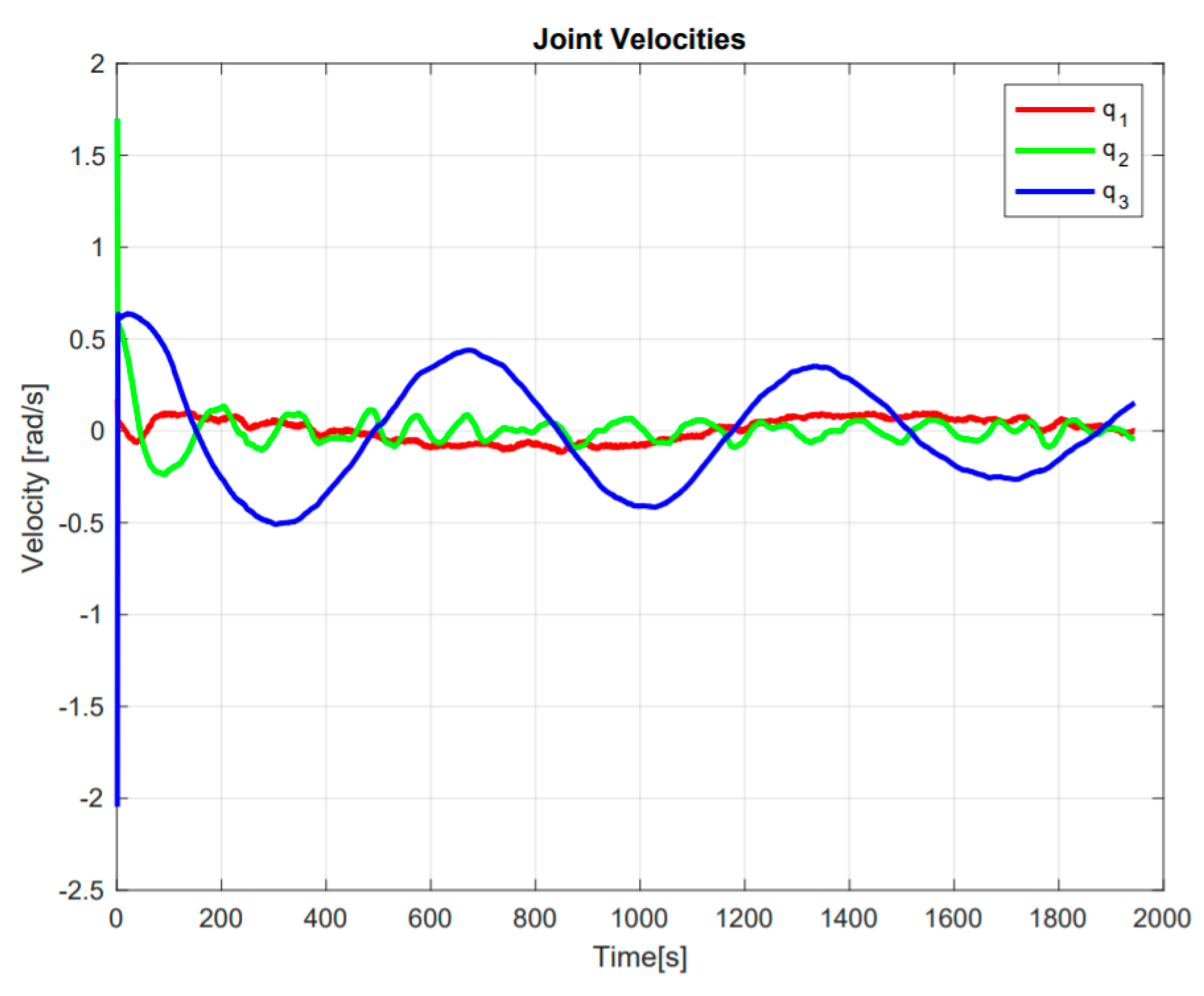
4.4. Experiment 4: LAMDA Controller
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tognon, M.; Chavez, H.A.T.; Gasparin, E.; Sable, Q.; Bicego, D.; Mallet, A.; Lany, M.; Santi, G.; Revaz, B.; Cortes, J.; et al. A Truly-Redundant Aerial Manipulator System with Application to Push-and-Slide Inspection in Industrial Plants. IEEE Robot. Autom. Lett. 2019, 4, 1846–1851. [Google Scholar] [CrossRef] [Green Version]
- Hamaza, S.; Georgilas, I.; Richardson, T. 2D Contour Following with an Unmanned Aerial Manipulator: Towards Tactile-Based Aerial Navigation. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 3664–3669. [Google Scholar]
- Bartelds, T.; Capra, A.; Hamaza, S.; Stramigioli, S.; Fumagalli, M. Compliant Aerial Manipulators: Toward a New Generation of Aerial Robotic Workers. IEEE Robot. Autom. Lett. 2016, 1, 477–483. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Kim, H.; Kim, U.; Lee, H. Concave Wall Surface Tracking for Aerial Manipulator Using Contact Force Estimation Algorithm. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13 October 2020; pp. 850–855. [Google Scholar]
- Yang, Y.; Liu, J.; Li, Z.; Yang, X.; Yu, X.; Gao, H. Nonlinear Disturbance Observer Based Adaptive Backstepping Control for Trajectory Tracking of Aerial Parallel Manipulator. In Proceedings of the IECON 2020 the 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18 October 2020; pp. 4776–4781. [Google Scholar]
- Guayasamin, A.; Leica, P.; Herrera, M.; Camacho, O. Trajectory Tracking Control for Aerial Manipulator Based on Lyapunov and Sliding Mode Control. In Proceedings of the 2018 International Conference on Information Systems and Computer Science (INCISCOS), Quito, Ecuador, 14–16 November 2018; pp. 36–41. [Google Scholar]
- Imanberdiyev, N.; Kayacan, E. Redundancy Resolution Based Trajectory Generation for Dual-Arm Aerial Manipulators via Online Model Predictive Control. In Proceedings of the IECON 2020 the 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18 October 2020; pp. 674–681. [Google Scholar]
- Tlatelpa-Osorio, Y.E.; Rodriguez-Cortes, H.; Acosta, J.A. A Descentralized Approach for the Aerial Manipulator Trajectory Tracking. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 504–511. [Google Scholar]
- Wang, X.; Zhou, Z.; Chen, S.; Wang, R. Trajectory Tracking and Vibration Suppression of Spacecraft Combination Connected by a Space Manipulator. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 8055–8060. [Google Scholar]
- Camacho, O.; Leica, P.; Antamba, J.; Quinonez, J. Null-Space Based Control Applied to a Formation of Aerial Manipulators in Congested Environment. In Proceedings of the 2019 International Conference on Information Systems and Computer Science (INCISCOS), Quito, Ecuador, 20–22 November 2019; pp. 244–250. [Google Scholar]
- Gkountas, K.; Tzes, A. Leader/Follower Force Control of Aerial Manipulators. IEEE Access 2021, 9, 17584–17595. [Google Scholar] [CrossRef]
- Morton, K.; McFadyen, A.; Gonzalez, F. Generalized Trajectory Control for Tree-Structured Aerial Manipulators. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 947–956. [Google Scholar]
- Jia, P.; Li, E.; Liang, Z.; Qiang, Y. Adaptive Neural Network Control of an Aerial Work Platform’s Arm. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; pp. 3567–3570. [Google Scholar]
- Muscio, G.; Pierri, F.; Trujillo, M.A.; Cataldi, E.; Antonelli, G.; Caccavale, F.; Viguria, A.; Chiaverini, S.; Ollero, A. Coordinated Control of Aerial Robotic Manipulators: Theory and Experiments. IEEE Trans. Contr. Syst. Technol. 2018, 26, 1406–1413. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.-C.; Huang, C.-Y. DDPG-Based Adaptive Robust Tracking Control for Aerial Manipulators With Decoupling Approach. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef]
- Naldi, R.; Pounds, P.; De Marco, S.; Marconi, L. Output Tracking for Quadrotor-Based Aerial Manipulators. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 1855–1860. [Google Scholar]
- Mora-Florez, J.; Barrera-Nunez, V.; Carrillo-Caicedo, G. Fault Location in Power Distribution Systems Using a Learning Algorithm for Multivariable Data Analysis. IEEE Trans. Power Deliv. 2007, 22, 1715–1721. [Google Scholar] [CrossRef]
- Botía Valderrama, J.F.; Botía Valderrama, D.J.L. On LAMDA Clustering Method Based on Typicality Degree and Intuitionistic Fuzzy Sets. Expert Syst. Appl. 2018, 107, 196–221. [Google Scholar] [CrossRef]
- van der Tak, F.; Lique, F.; Faure, A.; Black, J.; van Dishoeck, E. The Leiden Atomic and Molecular Database (LAMDA): Current Status, Recent Updates, and Future Plans. Atoms 2020, 8, 15. [Google Scholar] [CrossRef]
- Valderrama, J.F.B.; Valderrama, D.J.L.B. Two Cluster Validity Indices for the LAMDA Clustering Method. Appl. Soft Comput. 2020, 89, 106102. [Google Scholar] [CrossRef]
- Ricardo Hernandez, H.; Luis Camas, J.; Medina, A.; Perez, M.; Veronique Le Lann, M. Fault Diagnosis by LAMDA methodology Applied to Drinking Water Plant. IEEE Latin Am. Trans. 2014, 12, 985–990. [Google Scholar] [CrossRef]
- Morales Escobar, L.; Aguilar, J.; Garces-Jimenez, A.; Gutierrez De Mesa, J.A.; Gomez-Pulido, J.M. Advanced Fuzzy-Logic-Based Context-Driven Control for HVAC Management Systems in Buildings. IEEE Access 2020, 8, 16111–16126. [Google Scholar] [CrossRef]
- Morales, L.; Aguilar, J.; Rosales, A.; Chávez, D.; Leica, P. Modeling and Control of Nonlinear Systems Using an Adaptive LAMDA Approach. Appl. Soft Comput. 2020, 95, 106571. [Google Scholar] [CrossRef]
- Morales, L.; Aguilar, J.; Camacho, O.; Rosales, A. An Intelligent Sliding Mode Controller Based on LAMDA for a Class of SISO Uncertain Systems. Inf. Sci. 2021. [Google Scholar] [CrossRef]
- Ruiz, F.A.; Isaza, C.V.; Agudelo, A.F.; Agudelo, J.R. A New Criterion to Validate and Improve the Classification Process of LAMDA Algorithm Applied to Diesel Engines. Eng. Appl. Artif. Intell. 2017, 60, 117–127. [Google Scholar] [CrossRef]
- Morales, L.; Aguilar, J.; Chávez, D.; Isaza, C. LAMDA-HAD, an Extension to the LAMDA Classifier in the Context of Supervised Learning. Int. J. Inf. Technol. Decis. Mak. 2020, 19, 283–316. [Google Scholar] [CrossRef]
- Wai, R.-J.; Chen, P.-C. Intelligent Tracking Control for Robot Manipulator Including Actuator Dynamics via TSK-Type Fuzzy Neural Network. IEEE Trans. Fuzzy Syst. 2004, 12, 552–559. [Google Scholar] [CrossRef]
- Li, D.; Zhenqi, G. Trajectory Tracking Control of an Aerial Robot Based on Linear Active Disturbance Rejection Control Approach. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 5004–5009. [Google Scholar]
- Weather Spark. Average Wheather on February 20th in Ambato. 2021. Available online: https://es.weatherspark.com/d/20027/2/20/Tiempo-promedio-el-20-de-febrero-en-Ambato-Ecuador#Sections-Wind (accessed on 25 March 2021).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NS | ZE | PS | PB | |
|---|---|---|---|---|---|
| M > 0 | |||||
| NB | NS | ZE | PS | PB | ||
|---|---|---|---|---|---|---|
| ST | PB | C5 = ZE | C10 = ZE | C15 = PS | C20 = PB | C25 = PB |
| PS | C4 = ZE | C9 = ZE | C14 = PS | C19 = PB | C24 = PB | |
| ZE | C3 = NB | C8 = NS | C13 = ZE | C18 = PS | C23 = PB | |
| NS | C2 = NB | C7 = NB | C12 = NS | C17 = ZE | C22 = ZE | |
| NB | C1 = NB | C6 = NB | C11 = NS | C16 = ZE | C21 = ZE | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andaluz, G.M.; Morales, L.; Leica, P.; Andaluz, V.H.; Palacios-Navarro, G. LAMDA Controller Applied to the Trajectory Tracking of an Aerial Manipulator. Appl. Sci. 2021, 11, 5885. https://doi.org/10.3390/app11135885
Andaluz GM, Morales L, Leica P, Andaluz VH, Palacios-Navarro G. LAMDA Controller Applied to the Trajectory Tracking of an Aerial Manipulator. Applied Sciences. 2021; 11(13):5885. https://doi.org/10.3390/app11135885
Chicago/Turabian StyleAndaluz, Gabriela M., Luis Morales, Paulo Leica, Víctor H. Andaluz, and Guillermo Palacios-Navarro. 2021. "LAMDA Controller Applied to the Trajectory Tracking of an Aerial Manipulator" Applied Sciences 11, no. 13: 5885. https://doi.org/10.3390/app11135885