
A Mobile Robot Position Adjustment as a Fusion of Vision System and Wheels Odometry in Autonomous Track Driving †



Abstract
:1. Introduction
2. Determining Vehicle Position
2.1. Position from Wheels and IMU
2.2. Position from ARTags
2.2.1. Edge Detection—Canny Algorithm
2.2.2. Contour Detection and Polygonal Approximation
2.2.3. Rejecting Incorrect Markers
2.2.4. Removing Perspective and Warping Algorithms
2.2.5. Detecting Marker Frame and Reading Its Code
2.2.6. Calculation of the Position and Orientation of the Marker
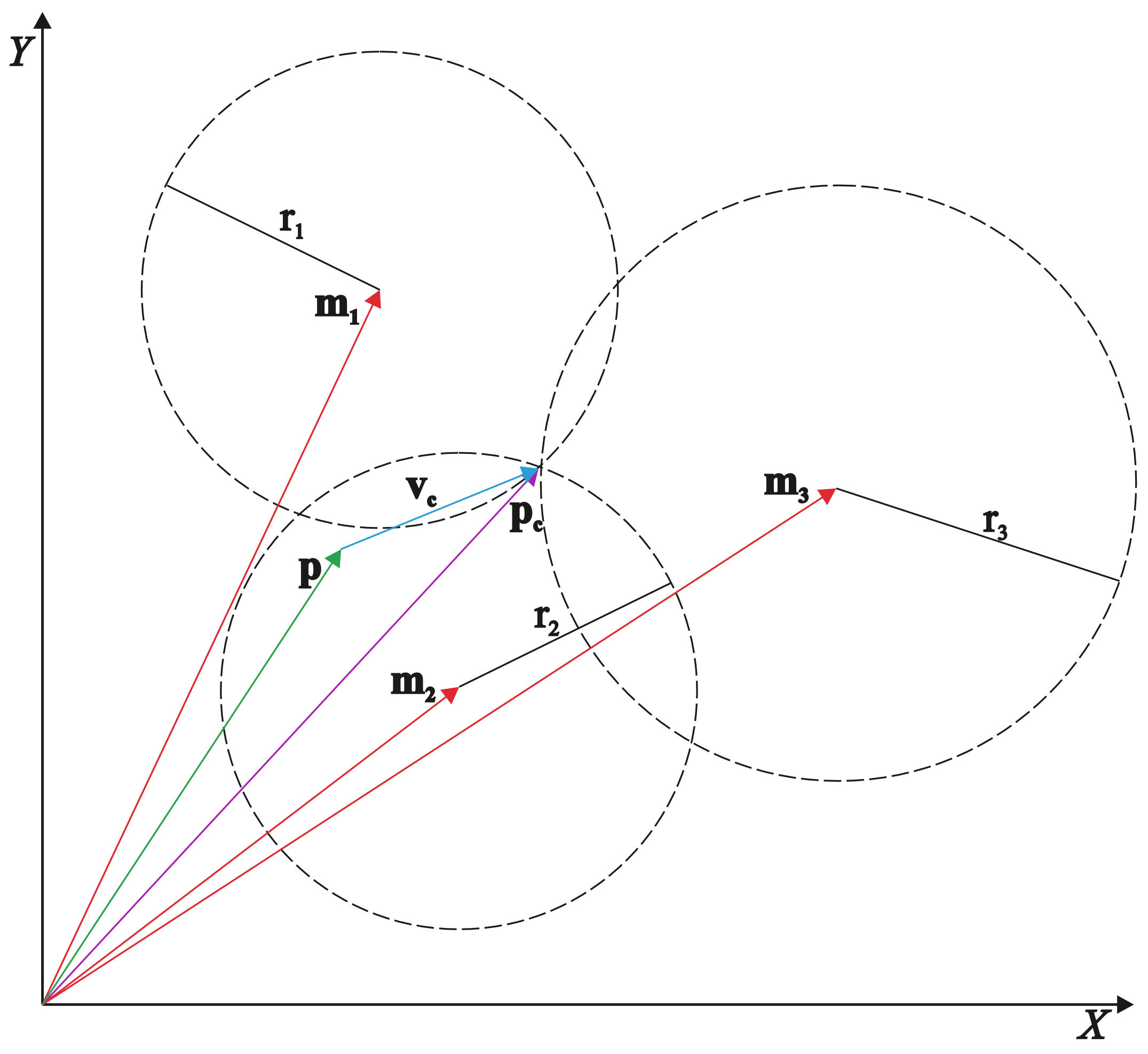
2.3. Fusion of Wheels and Vision Signals
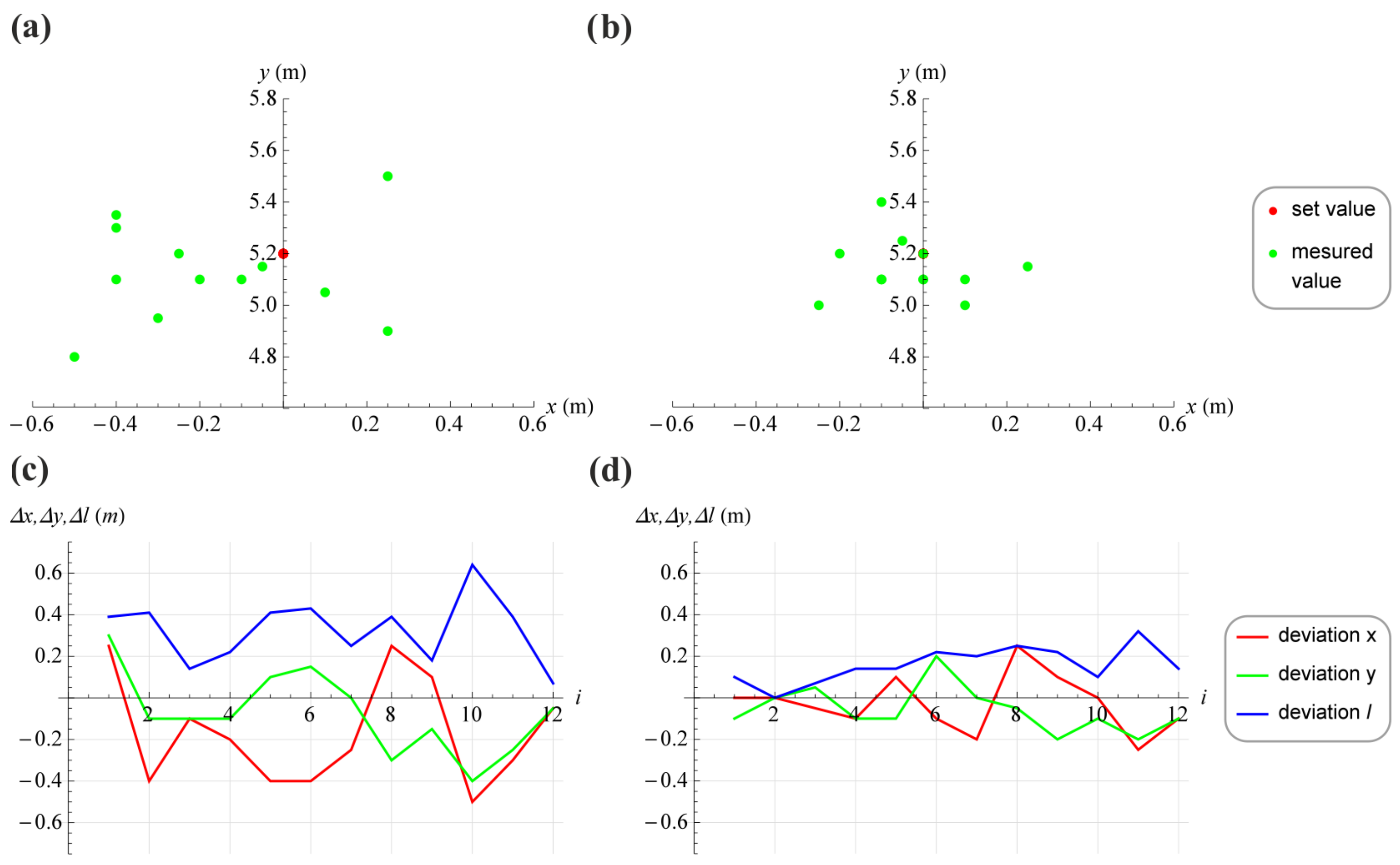
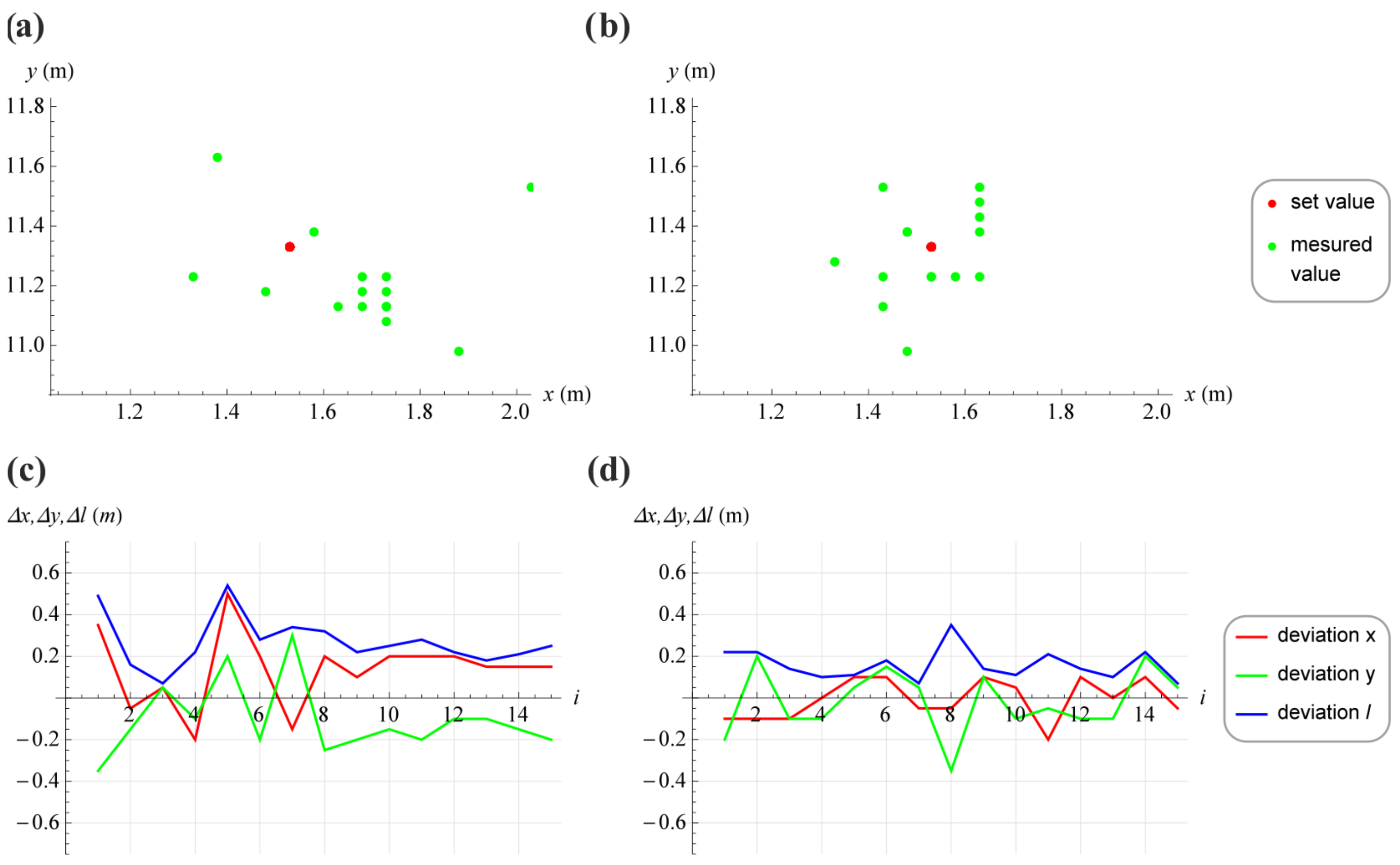
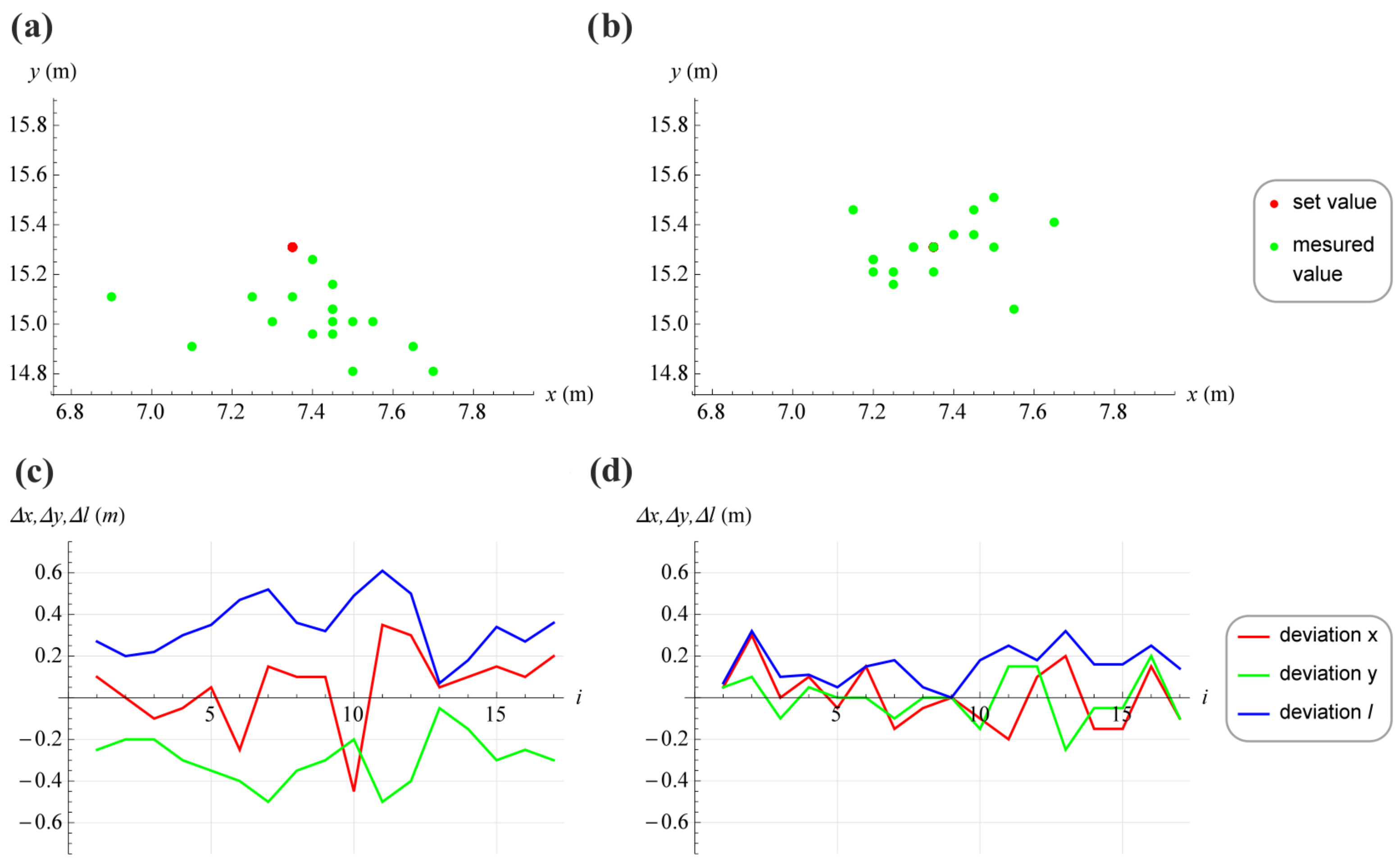
3. System Tests
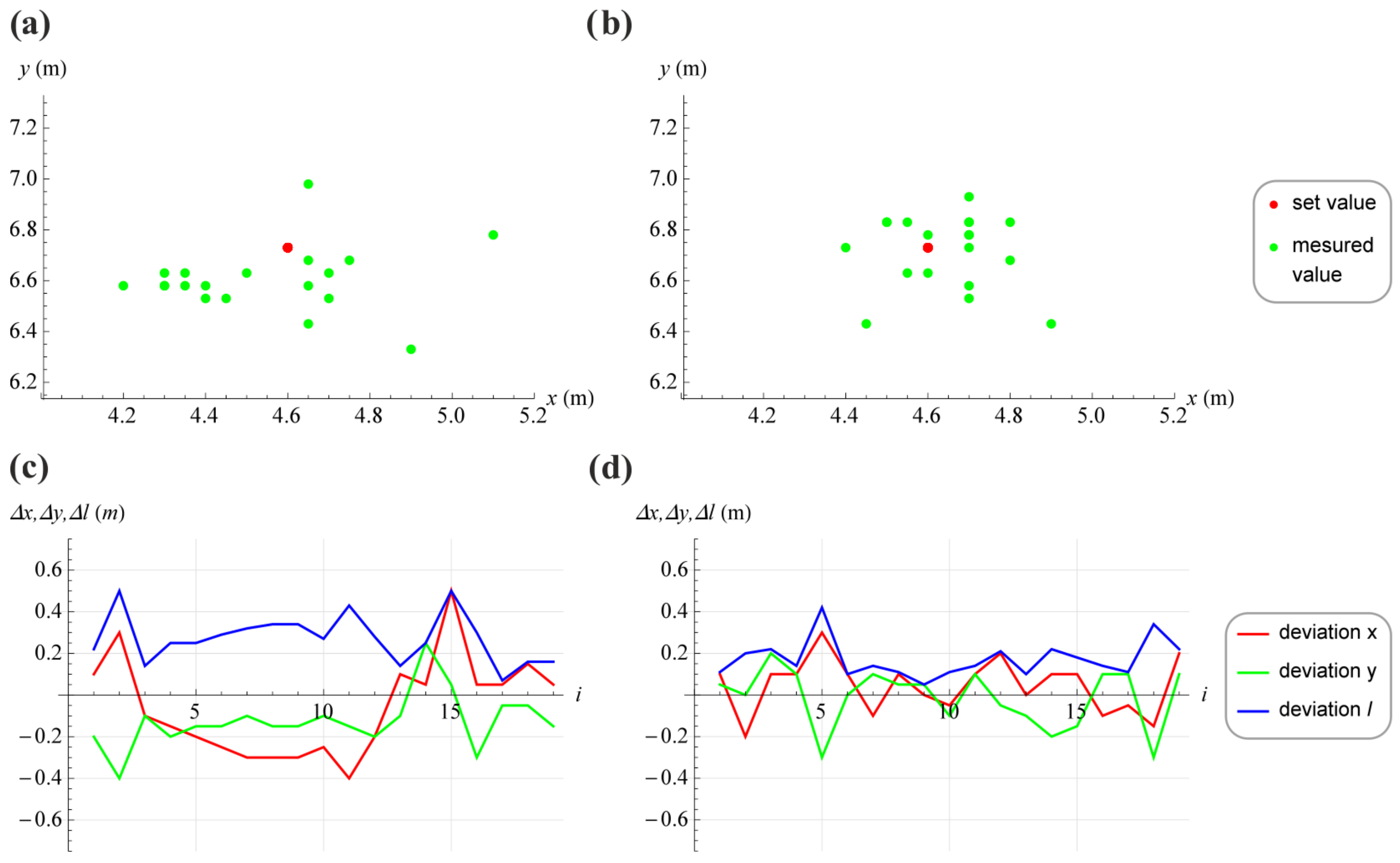
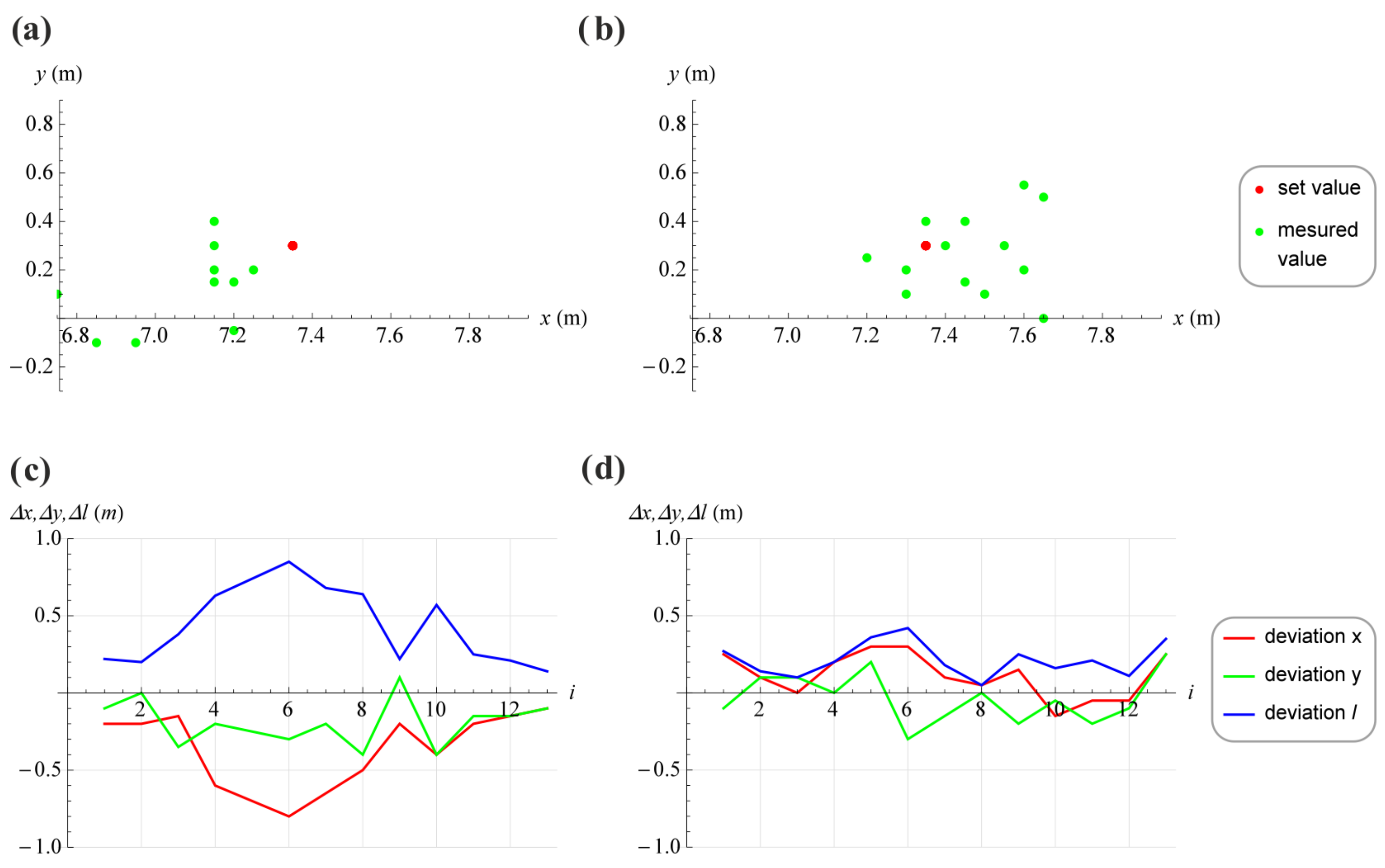
3.1. Test in the Laboratory
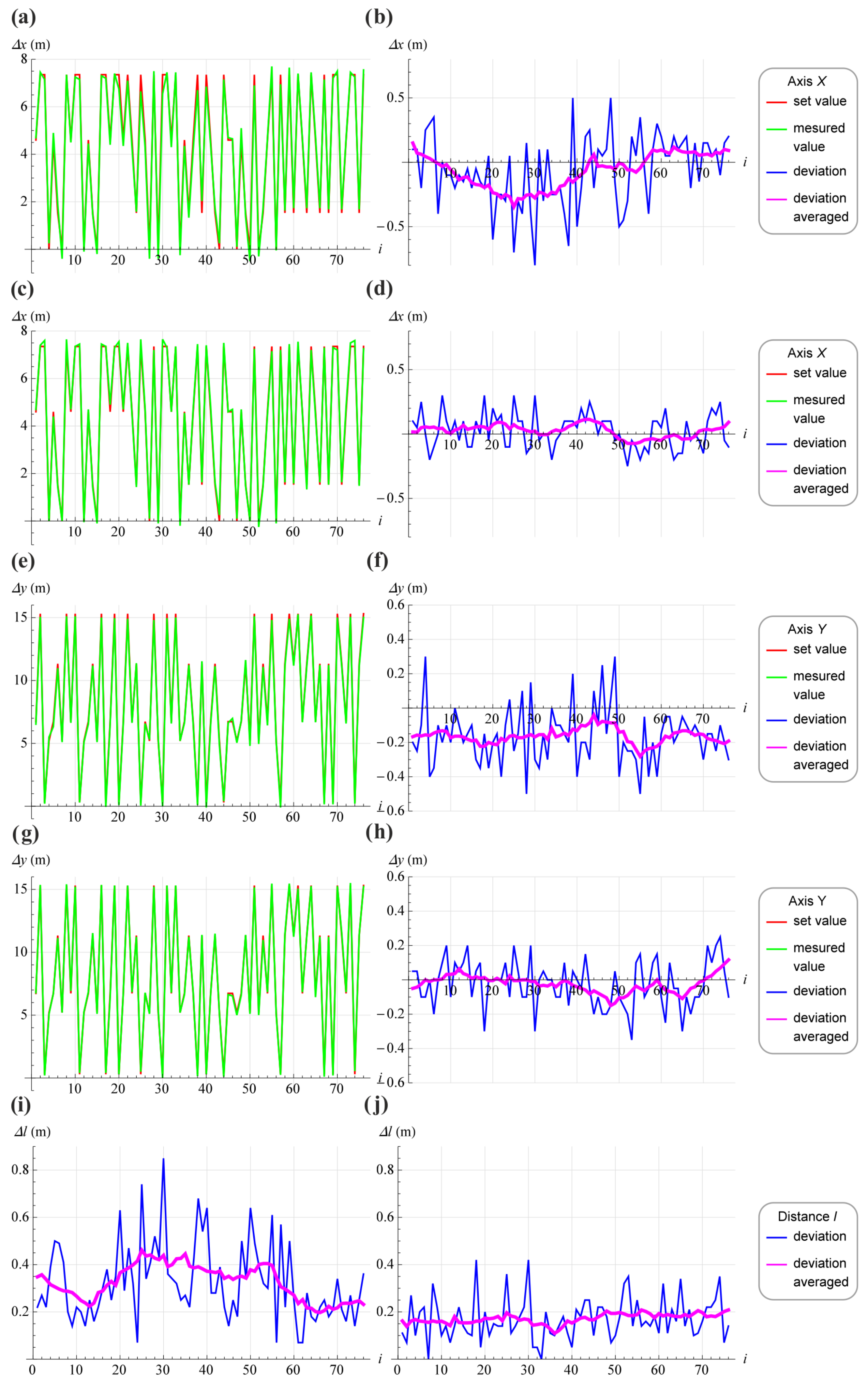
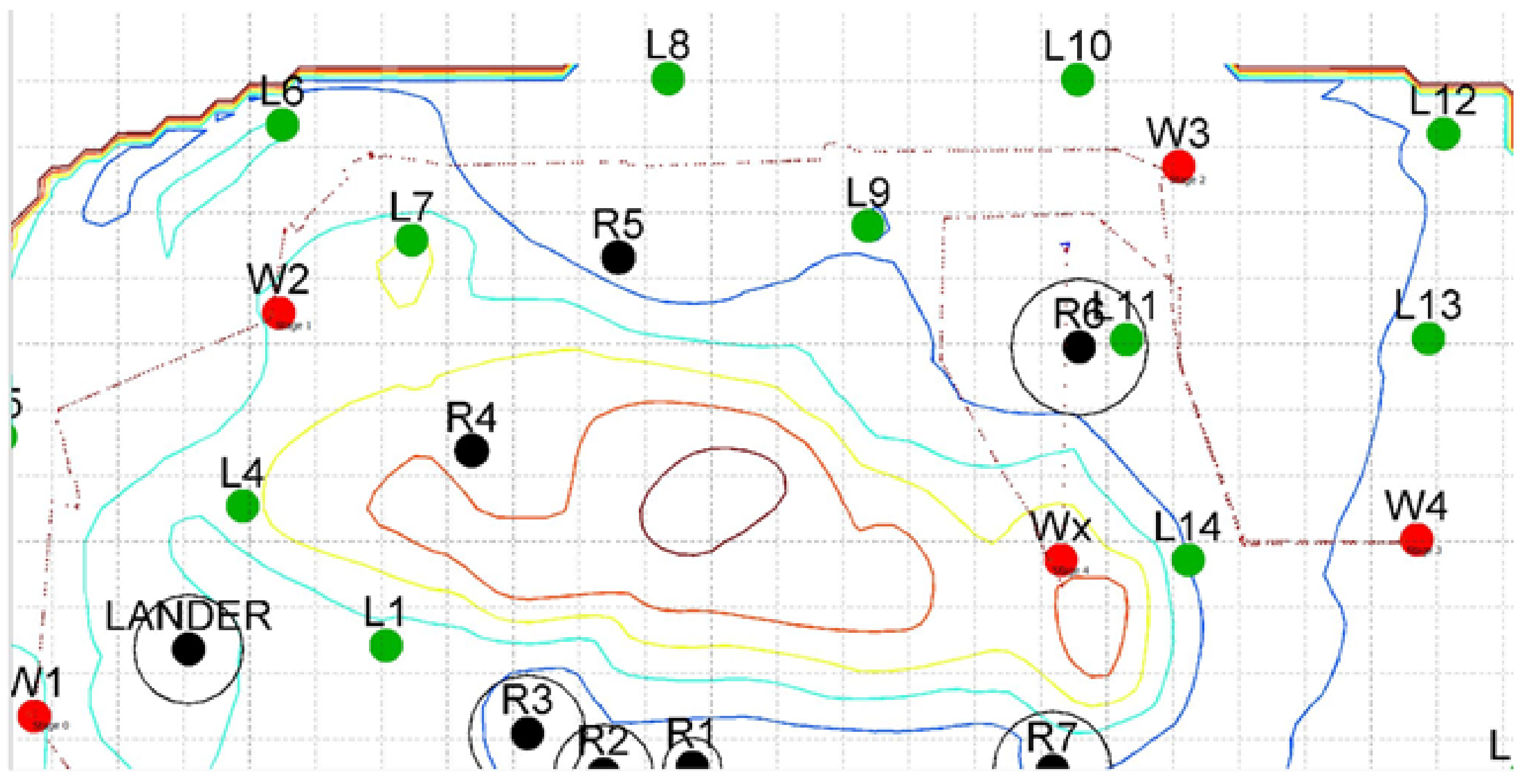
3.2. Test in the Real Environment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Scaramuzza, D.; Fraundorfer, F. Visual Odometry Part I: The First 30 Years and Fundamentals. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Fraundorfer, F. Visual Odometry: Part II: Matching, Robustness, Optimization, and Applications. IEEE Robot. Autom. Mag. 2012, 19, 78–90. [Google Scholar] [CrossRef] [Green Version]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Ichimura, T. 3D-odometry using tactile wheels and gyros: Localization simulation of a bike robot. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 1349–1355. [Google Scholar] [CrossRef]
- Tanaka, Y.; Semmyo, A.; Nishida, Y.; Yasukawa, S.; Ahn, J.; Ishii, K. Evaluation of underwater vehicle’s self-localization based on visual odometry or sensor odometry. In Proceedings of the 2019 14th Conference on Industrial and Information Systems (ICIIS), Kandy, Sri Lanka, 18–20 December 2019; pp. 384–389. [Google Scholar] [CrossRef]
- Brossard, M.; Bonnabel, S. Learning wheel odometry and IMU errors for localization. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 291–297. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Gao, W.; Hu, Z. Visual-inertial odometry tightly coupled with wheel encoder adopting robust initialization and online extrinsic calibration. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 5391–5397. [Google Scholar] [CrossRef]
- Jung, J.H.; Cha, J.; Chung, J.Y.; Kim, T.I.; Seo, M.H.; Park, S.Y.; Yeo, J.Y.; Yeo, C.G. Monocular Visual-Inertial-Wheel Odometry Using Low-Grade IMU in Urban Areas. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Chaudhari, T.; Jha, M.; Bangal, R.; Chincholkar, G. Path Planning and Controlling of Omni-Directional Robot Using Cartesian Odometry and PID Algorithm. In Proceedings of the 2019 International Conference on Computing, Power and Communication Technologies (GUCON), New Delhi, India, 27–28 September 2019; pp. 63–68, ISBN 978-1-7281-0017-3. [Google Scholar]
- Zhang, Z.; Wan, W.D. Mixed visual odometry based on direct method and orb feature. In Proceedings of the 2018 International Conference on Audio, Language and Image Processing (ICALIP), Shanghai, China, 16–17 July 2018; pp. 344–348. [Google Scholar] [CrossRef]
- Lin, Q.; Liu, X.; Zhang, Z. Mobile Robot Self-LocalizationUsing Visual Odometry Based on Ceiling Vision. In Proceedings of the 2019 IEEE Symposium Series on Computational Intelligence (SSCI), Xiamen, China, 6–9 December 2019; pp. 1435–1439. [Google Scholar] [CrossRef]
- Yang, X.; Li, X.; Guan, Y.; Song, J.; Wang, R. Overfitting reduction of pose estimation for deep learning visual odometry. China Commun. 2020, 17, 196–210. [Google Scholar] [CrossRef]
- Aladem, M.; Cofield, A.; Rawashdeh, S.A. Image Preprocessing for Stereoscopic Visual Odometry at Night. In Proceedings of the 2018 IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018; pp. 0785–0789. [Google Scholar] [CrossRef]
- Luo, J.; Wang, Y.; Tang, Y.; Liu, J. Visual odometry based on the pixels grayscale partial differential. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 1017–1021. [Google Scholar] [CrossRef]
- Zhong, X.; Zhou, Y.; Liu, H. Design and recognition of artificial landmarks for reliable indoor self-localization of mobile robots. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef] [Green Version]
- Baggio, D.L. Mastering OpenCV with Practical Computer Vision Projects; Packt Publishing Ltd.: Birmingham, UK, 2012; ISBN 978-1-84-951-782-9. [Google Scholar]
- Ayoubi, Y.; Laribi, M.A.; Arsicault, M.; Zeghloul, S. Safe pHRI via the Variable Stiffness Safety-Oriented Mechanism (V2SOM): Simulation and Experimental Validations. Appl. Sci. 2020, 10, 3810. [Google Scholar] [CrossRef]
- Abad, E.C.; Alonso, J.M.; García, M.J.G.; García-Prada, J.C. Methodology for the navigation optimization of a terrain-adaptive unmanned ground vehicle. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Corral, E.; García, M.J.G.; Castejon, C.; Meneses, J.; Gismeros, R. Dynamic modeling of the dissipative contact and friction forces of a passive biped-walking robot. Appl. Sci. 2020, 10, 2342. [Google Scholar] [CrossRef] [Green Version]
- Zwierzchowski, J.; Pietrala, D.; Napieralski, J. Fusion of Position Adjustment from Vision System and Wheels Odometry for Mobile Robot in Autonomous Driving. In Proceedings of the 2020 27th International Conference on Mixed Design of Integrated Circuits and System (MIXDES), Wroclaw, Poland, 25–27 June 2020; pp. 218–222. [Google Scholar] [CrossRef]
- Annusewicz, A.; Zwierzchowski, J. Marker Detection Algorithm for the Navigation of a Mobile Robot 2020. In Proceedings of the 27th International Conference on Mixed Design of Integrated Circuits and System (MIXDES), Wroclaw, Poland, 25–27 June 2020; pp. 223–226. [Google Scholar] [CrossRef]
- Canny, J.A. Computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Szrek, J.; Trybuła, P.; Góralczyk, M.; Michalak, A.; Zietek, B.; Zimroz, R. Accuracy Evaluation of Selected Mobile Inspection Robot Localization Techniques in a GNSS-Denied Environment. Sensors 2021, 21, 141. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vision Sys. Turned Off | Vision Sys. Turned On | |
|---|---|---|
| Sum of x module deviations | 17.30 | 8.55 |
| Sum of y module deviations | 15.40 | 8.50 |
| Sum of the distance module deviations | 24.72 | 13.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zwierzchowski, J.; Pietrala, D.; Napieralski, J.; Napieralski, A. A Mobile Robot Position Adjustment as a Fusion of Vision System and Wheels Odometry in Autonomous Track Driving. Appl. Sci. 2021, 11, 4496. https://doi.org/10.3390/app11104496
Zwierzchowski J, Pietrala D, Napieralski J, Napieralski A. A Mobile Robot Position Adjustment as a Fusion of Vision System and Wheels Odometry in Autonomous Track Driving. Applied Sciences. 2021; 11(10):4496. https://doi.org/10.3390/app11104496
Chicago/Turabian StyleZwierzchowski, Jarosław, Dawid Pietrala, Jan Napieralski, and Andrzej Napieralski. 2021. "A Mobile Robot Position Adjustment as a Fusion of Vision System and Wheels Odometry in Autonomous Track Driving" Applied Sciences 11, no. 10: 4496. https://doi.org/10.3390/app11104496