
Virtual Marker Technique to Enhance User Interactions in a Marker-Based AR System



Abstract
:1. Introduction
2. Related Work
2.1. Multiple Marker Cooperation
2.2. Marker-Based AR System
2.3. Gesture Interaction for AR Applications
3. Virtual Marker Technique
3.1. Why Virtual Markers
3.2. Virtual Marker
3.3. Basic Virtual Marker Generation
3.4. Combined Marker Generation
3.5. Manipulating Virtual Marker
4. Virtual Marker Technique in Marker-Based AR System
4.1. Level 1: Virtual Marker Programming
4.2. Level 2: AR Objects Control
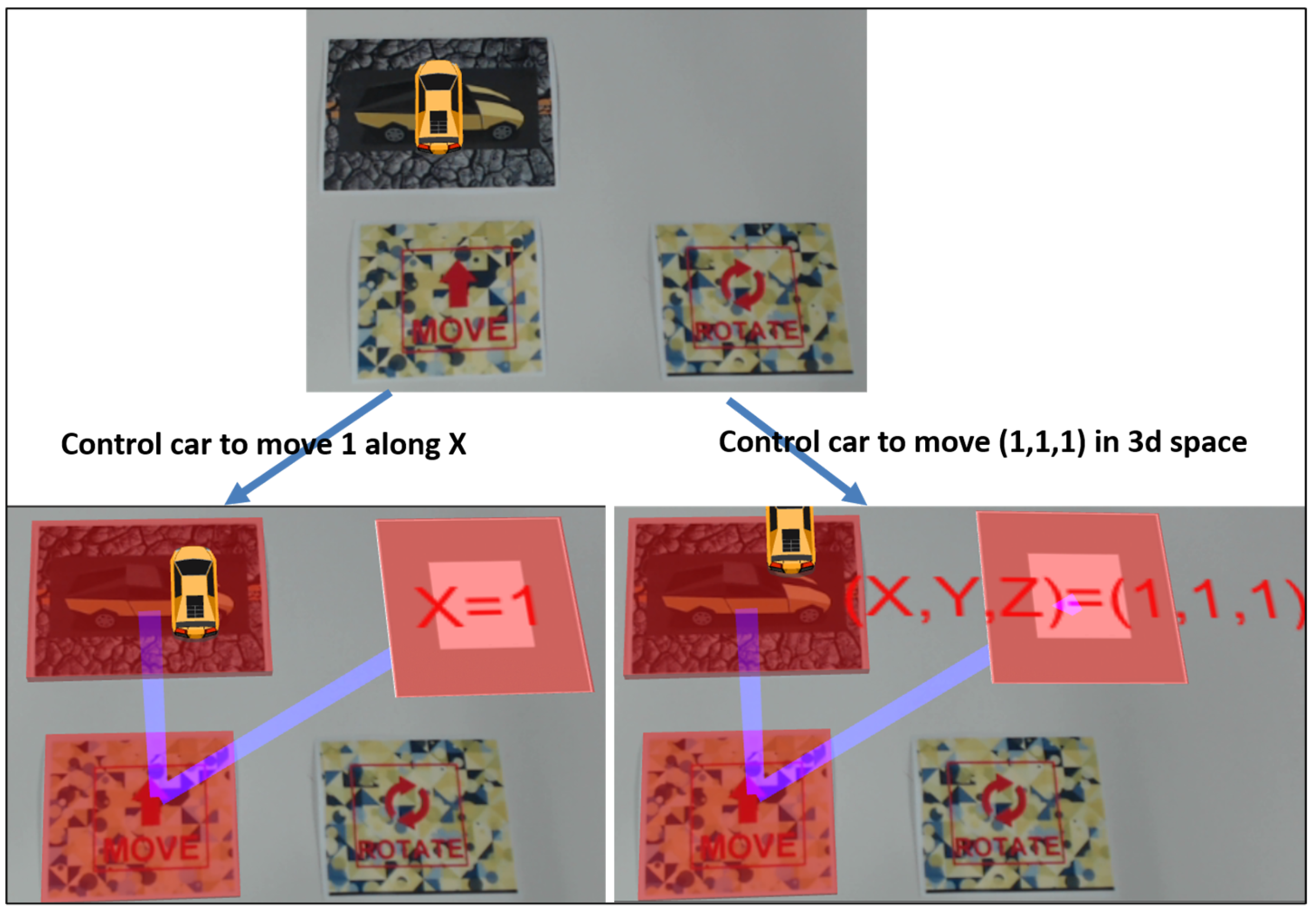
4.2.1. Movement and Rotation Control
4.2.2. Avatar Action and Scale Control
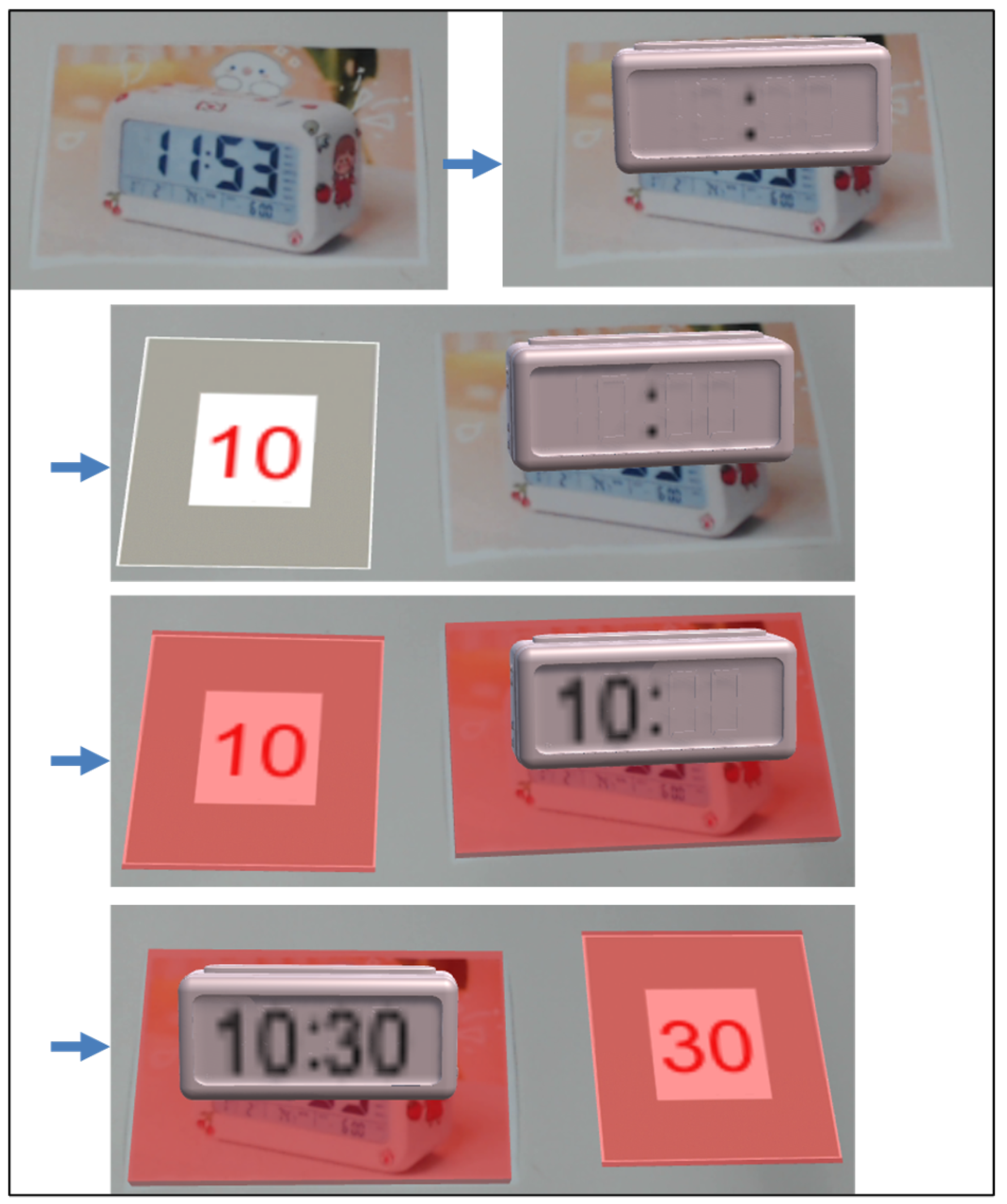
4.2.3. Virtual Timer Control
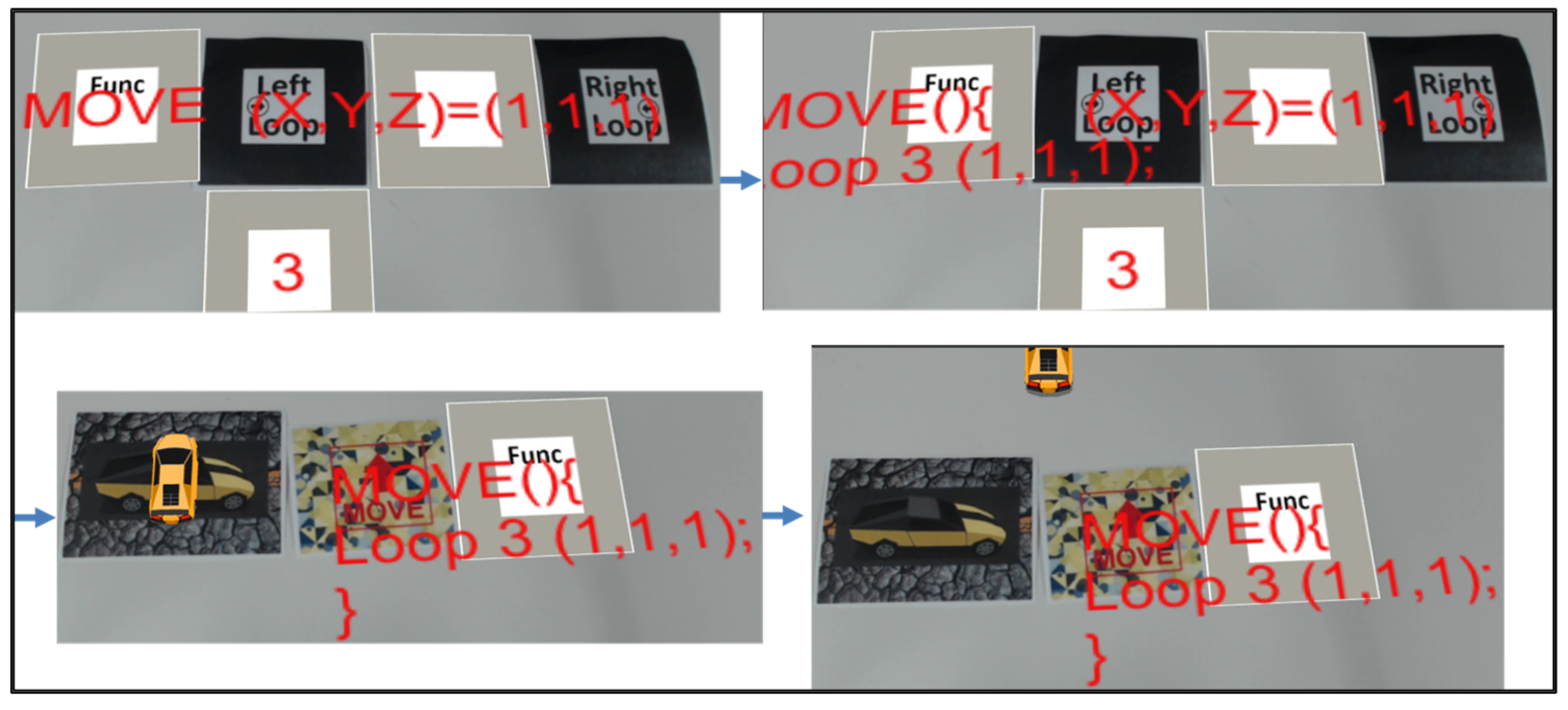
4.3. Level 3: Combination of Level 1 and 2
5. System Implementation
5.1. Multiple Marker Process
5.2. Virtual Marker
5.3. Hand Gesture
6. Pilot Study
6.1. Experiment Outline
6.2. Study Hypothesis
6.3. Participants
6.4. Condition and Procedure
6.5. Task 1
6.6. Task 2
6.7. Results
6.7.1. Task 1 Completion Time
6.7.2. Questionnaire after Task 1
6.7.3. Interview after Task 2
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alkhamisi, A.O.; Arabia, S.; Monowar, M.M. Rise of augmented reality: Current and future application areas. Int. J. Internet Distrib. Syst. 2013, 1, 25. [Google Scholar] [CrossRef] [Green Version]
- Chang, H.Y.; Wu, H.K.; Hsu, Y.S. Integrating a mobile augmented reality activity to contextualize student learning of a socioscientific issue. Br. J. Educ. Technol. 2013, 44, E95–E99. [Google Scholar] [CrossRef]
- Billinghurst, M.; Duenser, A. Augmented reality in the classroom. Computer 2012, 45, 56–63. [Google Scholar] [CrossRef]
- Yuen, S.C.Y.; Yaoyuneyong, G.; Johnson, E. Augmented reality: An overview and five directions for AR in education. J. Educ. Technol. Dev. Exch. 2011, 4, 11. [Google Scholar] [CrossRef]
- Roberts, D.W.; Strohbehn, J.W.; Hatch, J.F.; Murray, W.; Kettenberger, H. A frameless stereotaxic integration of computerized tomographic imaging and the operating microscope. J. Neurosurg. 1986, 65, 545–549. [Google Scholar] [CrossRef]
- Bajura, M.; Fuchs, H.; Ohbuchi, R. Merging virtual objects with the real world: Seeing ultrasound imagery within the patient. ACM SIGGRAPH Comput. Graph. 1992, 26, 203–210. [Google Scholar] [CrossRef]
- Blum, T.; Stauder, R.; Euler, E.; Navab, N. Superman-like X-ray vision: Towards brain-computer interfaces for medical augmented reality. In Proceedings of the 2012 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Atlanta, GA, USA, 5–8 November 2012; pp. 271–272. [Google Scholar]
- Paszkiel, S. Augmented reality of technological environment in correlation with brain computer interfaces for control processes. In Recent Advances in Automation, Robotics and Measuring Techniques; Springer: Cham, Switzerland, 2014; pp. 197–203. [Google Scholar]
- Milgram, P.; Rastogi, A.; Grodski, J.J. Telerobotic control using augmented reality. In Proceedings of the 4th IEEE International Workshop on Robot and Human Communication, Tokyo, Japan, 5–7 July 1995; pp. 21–29. [Google Scholar]
- Tang, L.Z.W.; Ang, K.S.; Amirul, M.; Yusoff, M.B.M.; Tng, C.K.; Alyas, M.D.B.M.; Lim, J.G.; Kyaw, P.K.; Folianto, F. Augmented reality control home (ARCH) for disabled and elderlies. In Proceedings of the 2015 IEEE Tenth international conference on intelligent sensors, sensor networks and information processing (ISSNIP), Singapore, 7–9 April 2015; pp. 1–2. [Google Scholar]
- Reinhart, G.; Patron, C. Integrating augmented reality in the assembly domain-fundamentals, benefits and applications. CIRP Ann. 2003, 52, 5–8. [Google Scholar] [CrossRef]
- Tang, A.; Owen, C.; Biocca, F.; Mou, W. Comparative effectiveness of augmented reality in object assembly. In Proceedings of the SIGCHI conference on Human factors in computing systems, Ft. Lauderdale, FL, USA, 5–10 April 2003; pp. 73–80. [Google Scholar]
- Wu, H.K.; Lee, S.W.Y.; Chang, H.Y.; Liang, J.C. Current status, opportunities and challenges of augmented reality in education. Comput. Educ. 2013, 62, 41–49. [Google Scholar] [CrossRef]
- Azuma, R.T. A survey of augmented reality. Presence Teleoperators Virtual Environ. 1997, 6, 355–385. [Google Scholar] [CrossRef]
- Keil, J.; Edler, D.; Dickmann, F. Preparing the HoloLens for user studies: An augmented reality interface for the spatial adjustment of holographic objects in 3D indoor environments. KN-J. Cartogr. Geogr. Inf. 2019, 69, 205–215. [Google Scholar] [CrossRef] [Green Version]
- Mekni, M.; Lemieux, A. Augmented reality: Applications, challenges and future trends. Appl. Comput. Sci. 2014, 20, 205–214. [Google Scholar]
- Furht, B. Handbook of Augmented Reality; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Van Krevelen, D.; Poelman, R. A survey of augmented reality technologies, applications and limitations. Int. J. Virtual Real. 2010, 9, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Carmigniani, J.; Furht, B. Augmented reality: An overview. In Handbook of Augmented Reality; Springer: New York, NY, USA, 2011; pp. 3–46. [Google Scholar]
- Billinghurst, M.; Clark, A.; Lee, G. A survey of augmented reality. Found. Trends Hum.-Comput. Interact. 2015, 8, 73–272. [Google Scholar] [CrossRef]
- Billinghurst, M.; Kato, H.; Poupyrev, I. Tangible augmented reality. ACM Siggraph Asia 2008, 7, 1–10. [Google Scholar]
- Regenbrecht, H.; Baratoff, G.; Wagner, M. A tangible AR desktop environment. Comput. Graph. 2001, 25, 755–763. [Google Scholar] [CrossRef]
- Billinghurst, M.; Piumsomboon, T.; Bai, H. Hands in space: Gesture interaction with augmented-reality interfaces. IEEE Comput. Graph. Appl. 2014, 34, 77–80. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.T.; Liao, W.C. Computer-assisted culture learning in an online augmented reality environment based on free-hand gesture interaction. IEEE Trans. Learn. Technol. 2014, 7, 107–117. [Google Scholar] [CrossRef]
- Berryman, D.R. Augmented reality: A review. Med Ref. Serv. Q. 2012, 31, 212–218. [Google Scholar] [CrossRef] [PubMed]
- Martin Sagayam, K.; Ho, C.C.; Henesey, L.; Bestak, R. 3D scenery learning on solar system by using marker based augmented reality. In Proceedings of the 4th International Conference of the Virtual and Augmented Reality in Education, VARE 2018, Budapest, Hungary, 17–21 September 2018; pp. 139–143. [Google Scholar]
- Brito, P.Q.; Stoyanova, J. Marker versus markerless augmented reality. Which has more impact on users? Int. J. Hum.-Comput. Interact. 2018, 34, 819–833. [Google Scholar] [CrossRef]
- Steiniger, S.; Neun, M.; Edwardes, A. Foundations of location based services. Lect. Notes LBS 2006, 1, 2. [Google Scholar]
- Katiyar, A.; Kalra, K.; Garg, C. Marker based augmented reality. Adv. Comput. Sci. Inf. Technol. 2015, 2, 441–445. [Google Scholar]
- Wagner, D.; Pintaric, T.; Ledermann, F.; Schmalstieg, D. Towards massively multi-user augmented reality on handheld devices. In Proceedings of the International Conference on Pervasive Computing, Munich, Germany, 8–13 May 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 208–219. [Google Scholar]
- Dash, A.K.; Behera, S.K.; Dogra, D.P.; Roy, P.P. Designing of marker-based augmented reality learning environment for kids using convolutional neural network architecture. Displays 2018, 55, 46–54. [Google Scholar] [CrossRef]
- Horn, M.S.; Solovey, E.T.; Crouser, R.J.; Jacob, R.J. Comparing the use of tangible and graphical programming languages for informal science education. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Boston, MA, USA, 4–9 April 2009; pp. 975–984. [Google Scholar]
- Amin, D.; Govilkar, S. Comparative study of augmented reality SDKs. Int. J. Comput. Sci. Appl. 2015, 5, 11–26. [Google Scholar]
- Tada, K.; Tanaka, J. Tangible programming environment using paper cards as command objects. Procedia Manuf. 2015, 3, 5482–5489. [Google Scholar] [CrossRef] [Green Version]
- Sing, A.L.L.; Ibrahim, A.A.A.; Weng, N.G.; Hamzah, M.; Yung, W.C. Design and Development of Multimedia and Multi-Marker Detection Techniques in Interactive Augmented Reality Colouring Book. In Computational Science and Technology; Springer: Singapore, 2020; pp. 605–616. [Google Scholar]
- Boonbrahm, P.; Kaewrat, C.; Boonbrahm, S. Effective Collaborative Design of Large Virtual 3D Model using Multiple AR Markers. Procedia Manuf. 2020, 42, 387–392. [Google Scholar] [CrossRef]
- Zeng, H.; He, X.; Pan, H. FunPianoAR: A novel AR application for piano learning considering paired play based on multi-marker tracking. In Proceedings of the 2019 3rd International Conference on Machine Vision and Information Technology (CMVIT 2019), Guangzhou, China, 22–24 February 2019; Journal of Physics: Conference Series. IOP Publishing: Bristol, UK, 2019; Volume 1229, p. 012072. [Google Scholar]
- Kan, T.W.; Teng, C.H.; Chen, M.Y. QR code based augmented reality applications. In Handbook of Augmented Reality; Springer: New York, NY, USA, 2011; pp. 339–354. [Google Scholar]
- Hattori, K.; Hirai, T. An intuitive and educational programming tool with tangible blocks and AR. In Proceedings of the ACM SIGGRAPH 2019 Posters, Los Angeles, CA, USA, 28 July–1 August 2019; pp. 1–2. [Google Scholar]
- Jin, Q.; Wang, D.; Deng, X.; Zheng, N.; Chiu, S. AR-Maze: A tangible programming tool for children based on AR technology. In Proceedings of the 17th ACM Conference on Interaction Design and Children, Trondheim, Norway, 19–22 June 2018; pp. 611–616. [Google Scholar]
- Gherghina, A.; Olteanu, A.C.; Tapus, N. A marker-based augmented reality system for mobile devices. In Proceedings of the 2013 11th RoEduNet International Conference, Sinaia, Romania, 17–19 January 2013; pp. 1–6. [Google Scholar]
- Andrea, R.; Agus, F.; Ramadiani, R. “Magic Boosed” an elementary school geometry textbook with marker-based augmented reality. J. TELKOMNIKA. 2019, 17, 1242–1249. [Google Scholar] [CrossRef] [Green Version]
- Ambarwulan, D.; Muliyati, D. The Design of Augmented Reality Application as Learning Media Marker-Based for Android Smartphone. J. Penelit. Pengemb. Pendidik. Fis. 2016, 2, 73–80. [Google Scholar]
- Norraji, M.F.; Sunar, M.S. wARna—Mobile-based augmented reality coloring book. In Proceedings of the 2015 4th International Conference on Interactive Digital Media (ICIDM), Bandung, Indonesia, 1–5 December 2015; pp. 1–4. [Google Scholar]
- Bouaziz, R.; Alhejaili, M.; Al-Saedi, R.; Mihdhar, A.; Alsarrani, J. Using Marker Based Augmented Reality to teach autistic eating skills. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR), Utrecht, The Netherlands, 14–18 December 2020; pp. 239–242. [Google Scholar]
- Pashine, A.; Bisen, A.; Dhande, R. Marker Based Notice Board Using Augmented Reality Android Application. Int. J. Res. Appl. Sci. Eng. Technol. 2018, 6, 3163–3165. [Google Scholar] [CrossRef]
- Akussah, M.; Dehinbo, J. Developing a Marker-based Handheld Augmented Reality Application for Learning Mathematics. In EdMedia+ Innovate Learning; Association for the Advancement of Computing in Education (AACE): Chesapeake, VA, USA, 2018; pp. 856–866. [Google Scholar]
- Lee, M.; Green, R.; Billinghurst, M. 3D natural hand interaction for AR applications. In Proceedings of the 2008 23rd International Conference Image and Vision Computing New Zealand, Christchurch, New Zealand, 26–28 November 2008; pp. 1–6. [Google Scholar]
- Bellarbi, A.; Benbelkacem, S.; Zenati-Henda, N.; Belhocine, M. Hand gesture interaction using color-based method for tabletop interfaces. In Proceedings of the 2011 IEEE 7th International Symposium on Intelligent Signal Processing, Floriana, Malta, 19–21 September 2011; pp. 1–6. [Google Scholar]
- Bai, H.; Lee, G.A.; Ramakrishnan, M.; Billinghurst, M. 3D gesture interaction for handheld augmented reality. In Proceedings of the SIGGRAPH Asia 2014 Mobile Graphics and Interactive Applications, Shenzhen, China, 3–6 December 2014; pp. 1–6. [Google Scholar]
- Lee, B.; Chun, J. Interactive manipulation of augmented objects in marker-less ar using vision-based hand interaction. In Proceedings of the 2010 Seventh International Conference on Information Technology: New Generations, Las Vegas, NV, USA, 12–14 April 2010; pp. 398–403. [Google Scholar]
- Vasudevan, S.K.; Naveen, T.; Padminy, K.; Krithika, J.S.; Geethan, P. Marker-based augmented reality interface with gesture interaction to access remote file system. Int. J. Adv. Intell. Paradig. 2018, 10, 236–246. [Google Scholar] [CrossRef]
- Wikipedia Contributors. Augmented Reality—Wikipedia, The Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/w/index.php?title=Augmented_reality&oldid=1022096428 (accessed on 11 May 2021).
- Trepkowski, C.; Eibich, D.; Maiero, J.; Marquardt, A.; Kruijff, E.; Feiner, S. The effect of narrow field of view and information density on visual search performance in augmented reality. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 575–584. [Google Scholar]
- Xiong, J.; Tan, G.; Zhan, T.; Wu, S.T. Breaking the field-of-view limit in augmented reality with a scanning waveguide display. OSA Contin. 2020, 3, 2730–2740. [Google Scholar] [CrossRef]
- Nuernberger, B.; Ofek, E.; Benko, H.; Wilson, A.D. Snaptoreality: Aligning augmented reality to the real world. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 1233–1244. [Google Scholar]
- Shelley, T.; Lyons, L.; Zellner, M.; Minor, E. Evaluating the embodiment benefits of a paper-based tui for educational simulations. In Proceedings of the CHI’11 Extended Abstracts on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; pp. 1375–1380. [Google Scholar]
- Bai, H.; Gao, L.; El-Sana, J.; Billinghurst, M. Markerless 3D gesture-based interaction for handheld augmented reality interfaces. In Proceedings of the 2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Adelaide, SA, Australia, 1–4 October 2013; pp. 1–6. [Google Scholar]
- Yang, M.T.; Liao, W.C.; Shih, Y.C. VECAR: Virtual English classroom with markerless augmented reality and intuitive gesture interaction. In Proceedings of the 2013 IEEE 13th International Conference on Advanced Learning Technologies, Beijing, China, 15–18 July 2013; pp. 439–440. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Number |
|---|---|
| P1 | 3 min and 19 s |
| P2 | 4 min and 20 s |
| P3 | 7 min and 10 s |
| P4 | 2 min and 47 s |
| P5 | 3 min and 25 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Tanaka, J. Virtual Marker Technique to Enhance User Interactions in a Marker-Based AR System. Appl. Sci. 2021, 11, 4379. https://doi.org/10.3390/app11104379
Liu B, Tanaka J. Virtual Marker Technique to Enhance User Interactions in a Marker-Based AR System. Applied Sciences. 2021; 11(10):4379. https://doi.org/10.3390/app11104379
Chicago/Turabian StyleLiu, Boyang, and Jiro Tanaka. 2021. "Virtual Marker Technique to Enhance User Interactions in a Marker-Based AR System" Applied Sciences 11, no. 10: 4379. https://doi.org/10.3390/app11104379