Performance Analysis of a Hybrid Electric Vehicle with Multiple Converter Configuration

 , , ,
, , , 
Abstract
:1. Introduction
2. Methodology
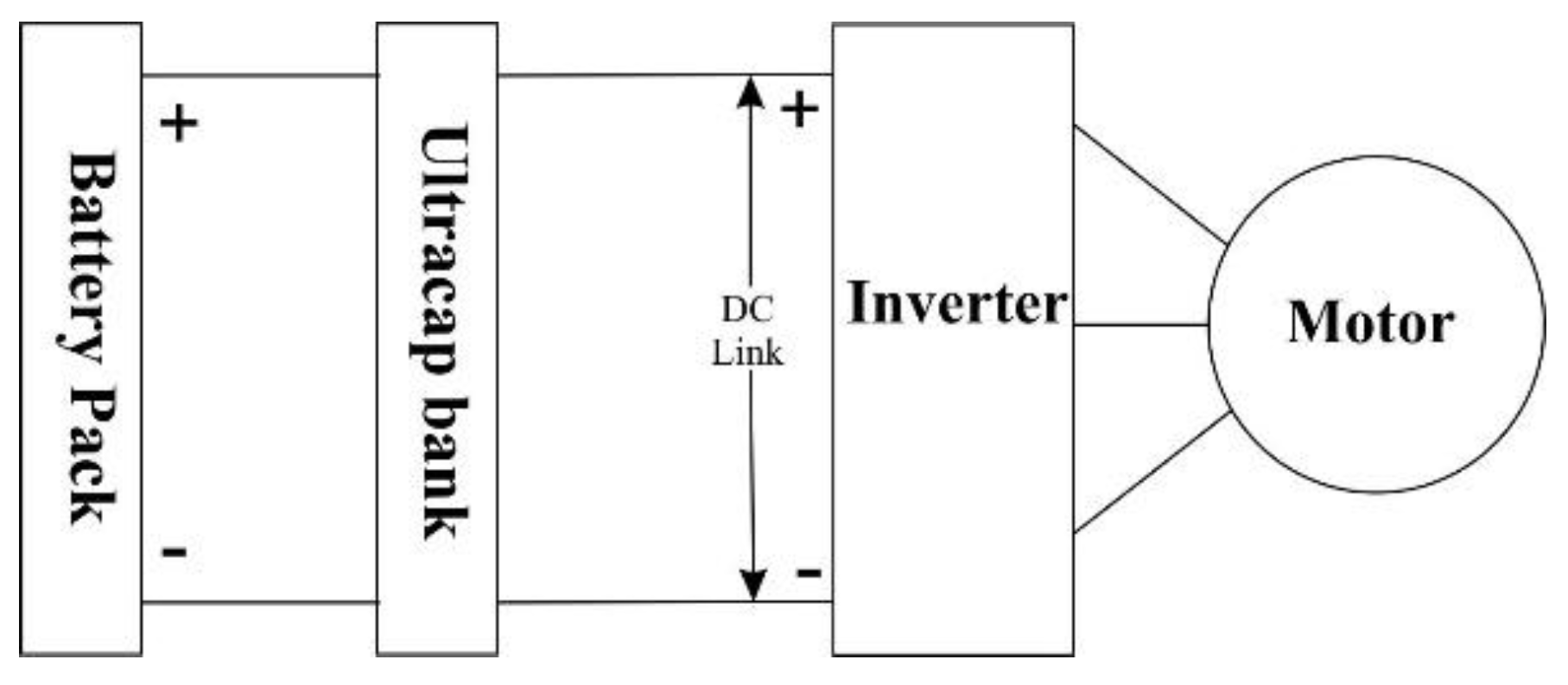
2.1. Passive Parallel Configuration
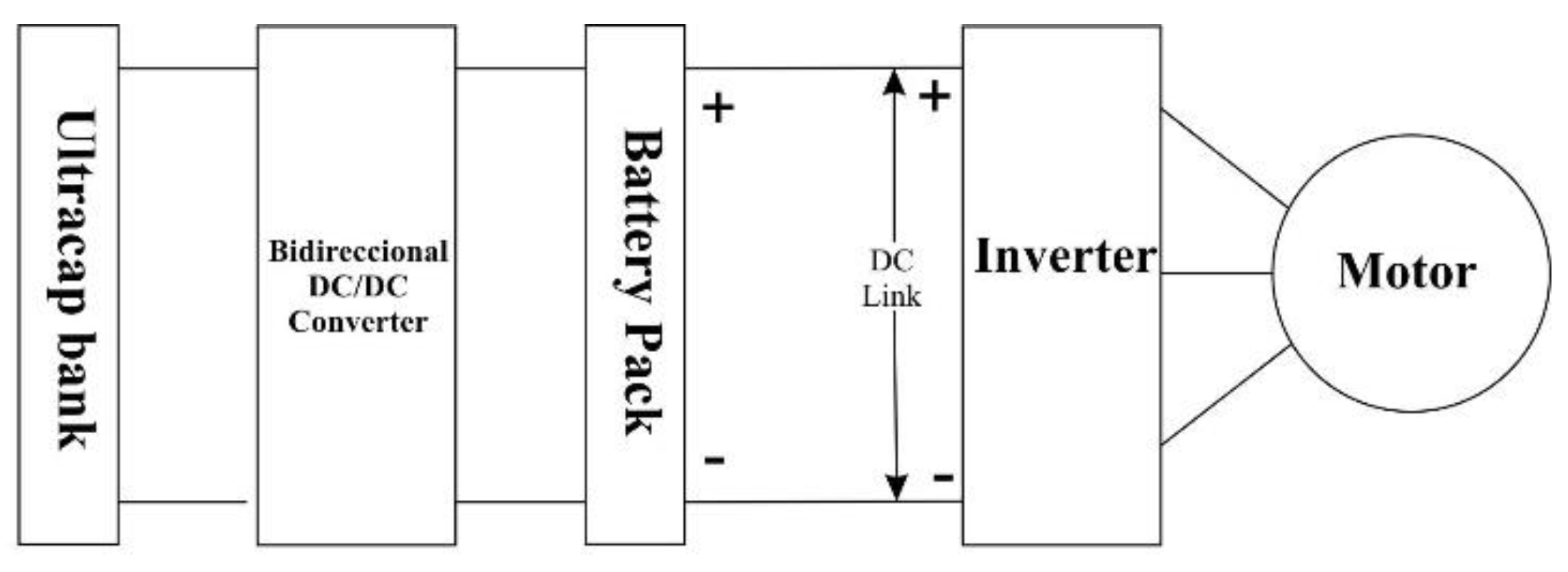
2.2. Ultracapacitor/Battery Configuration (C-UC/B)
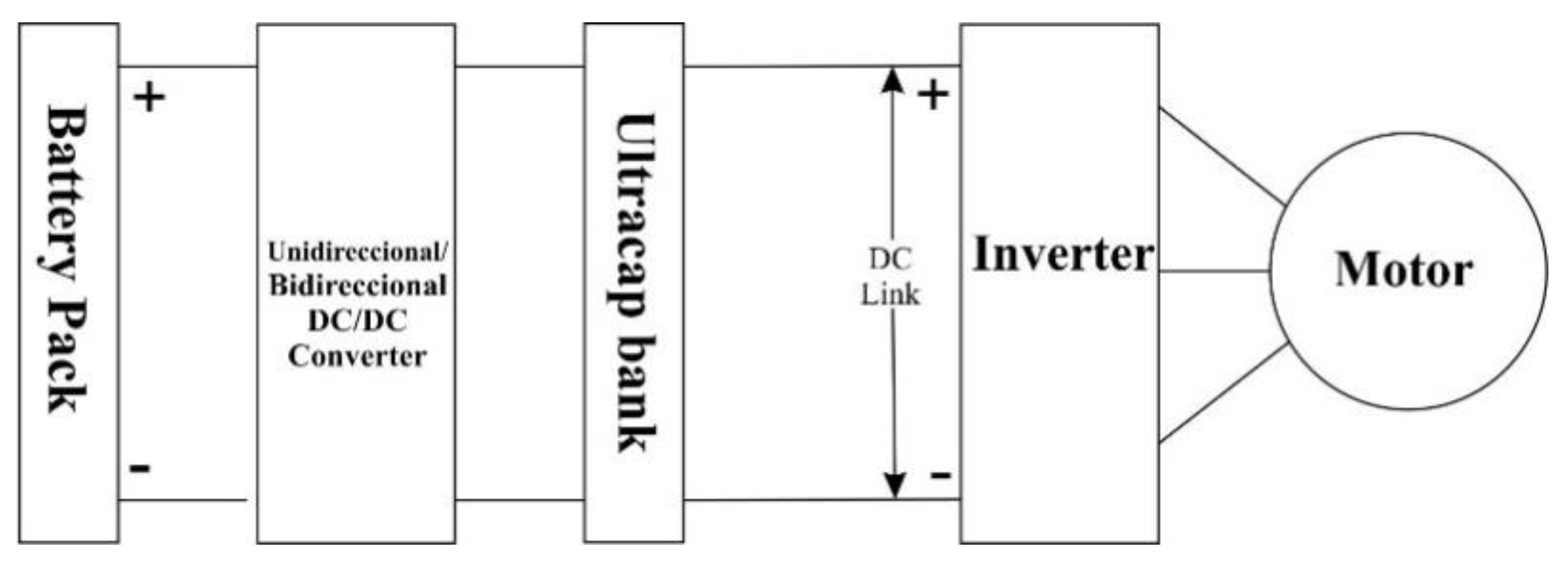
2.3. Battery/Ultracapacitor Configuration (C-B/UC)
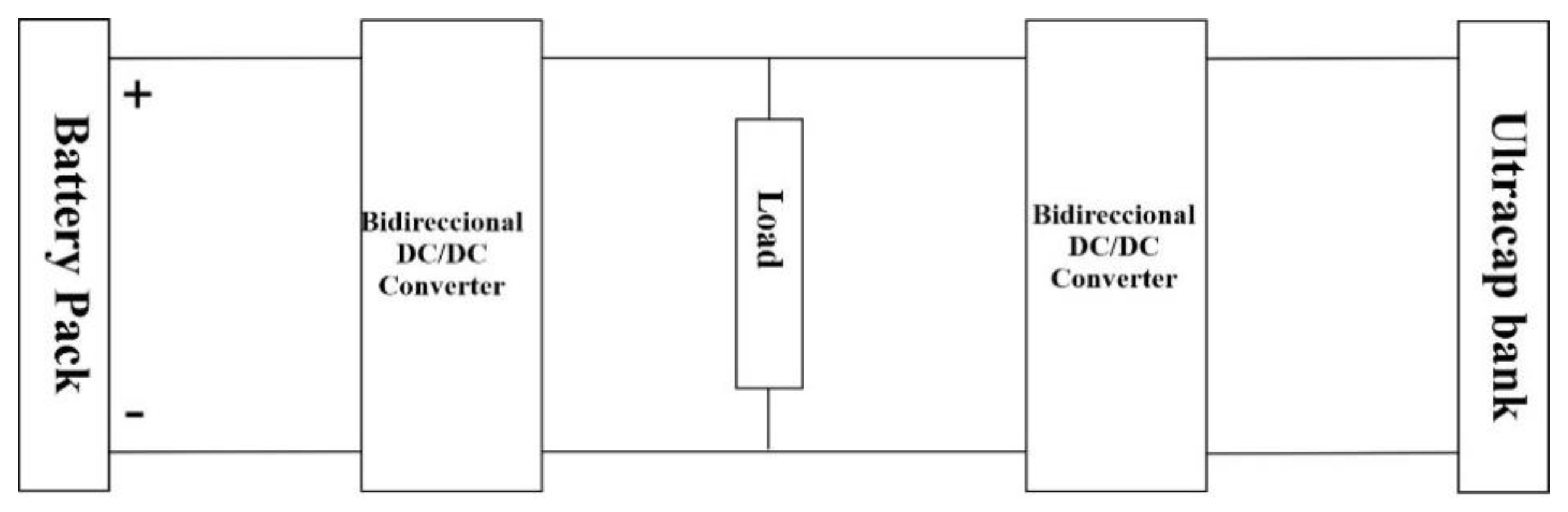
2.4. Multiple Converter Configuration (C-MC)
2.5. Vehicle Characteristics, Powertrain, and Energy Management Strategy
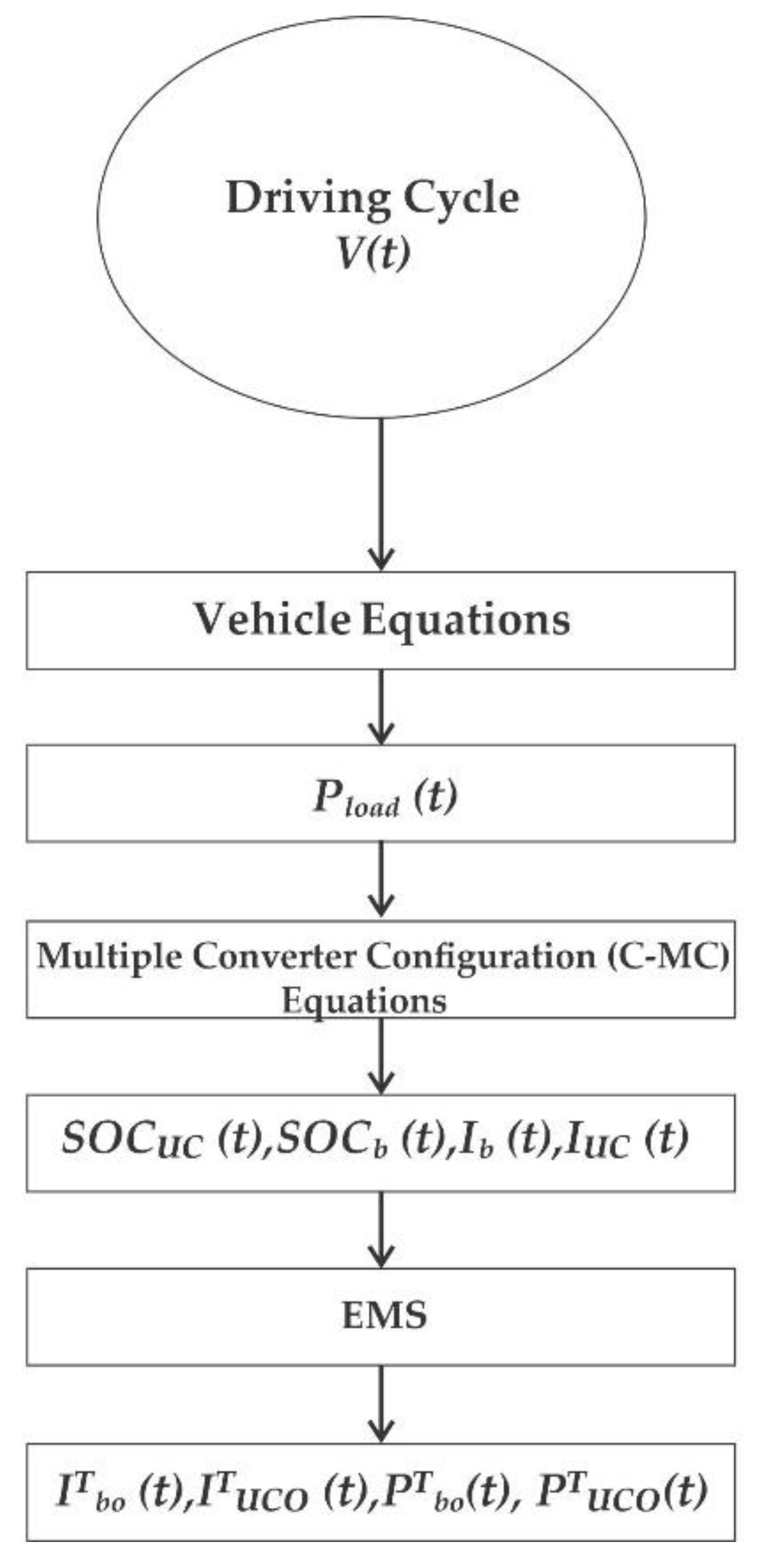
2.6. Multiple Converter Configuration Model (C-CM)
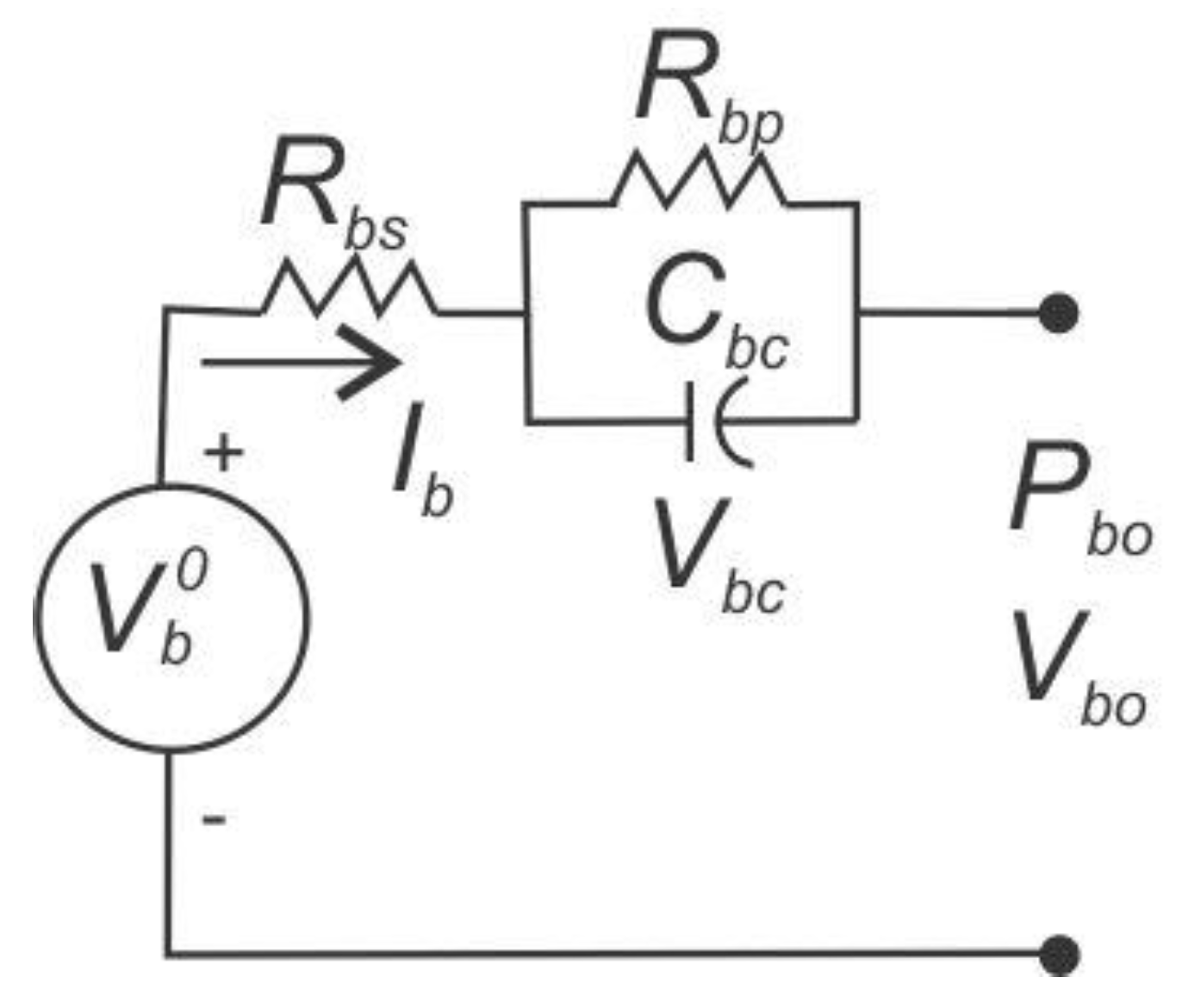
2.6.1. Battery Electrical Model
2.6.2. UC Electrical Model
2.6.3. DC/DC Converter
2.7. Electrical Model of the B Pack and the UC Bank
3. Results and Discussion
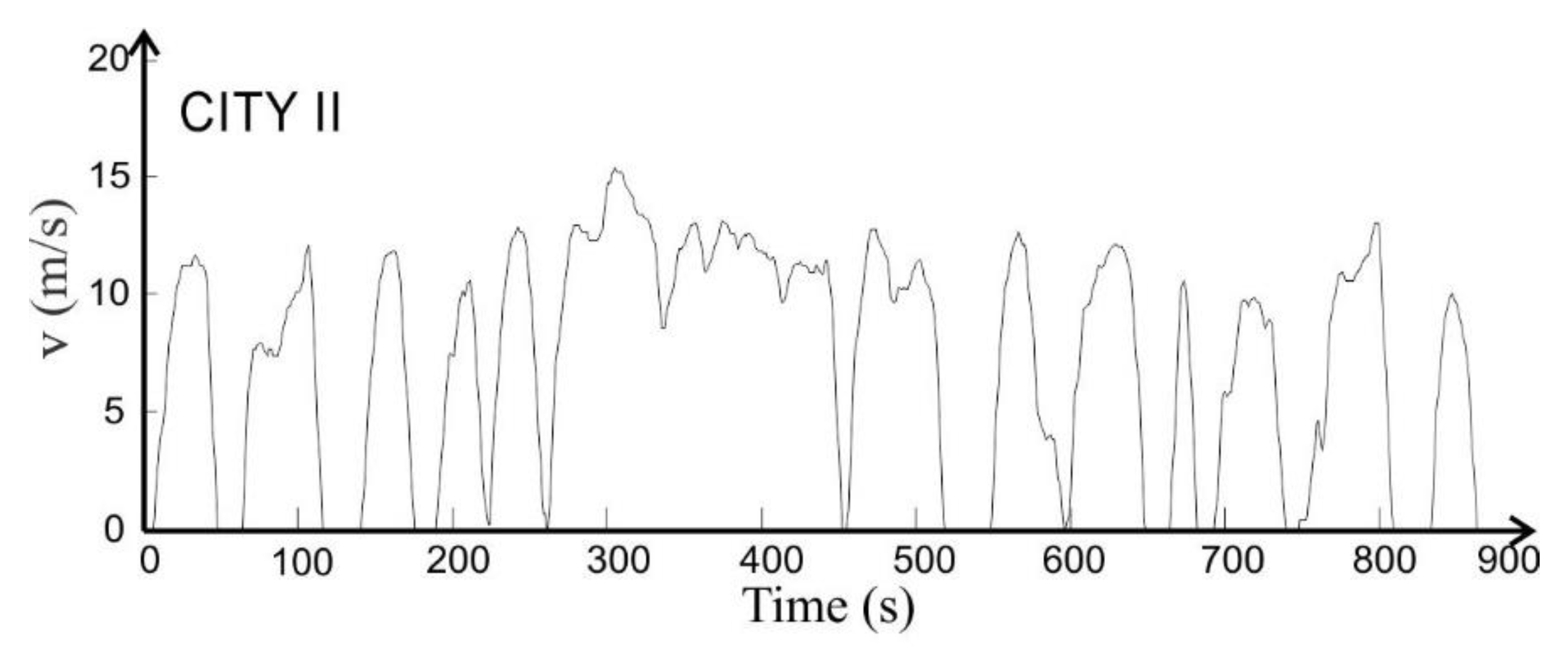
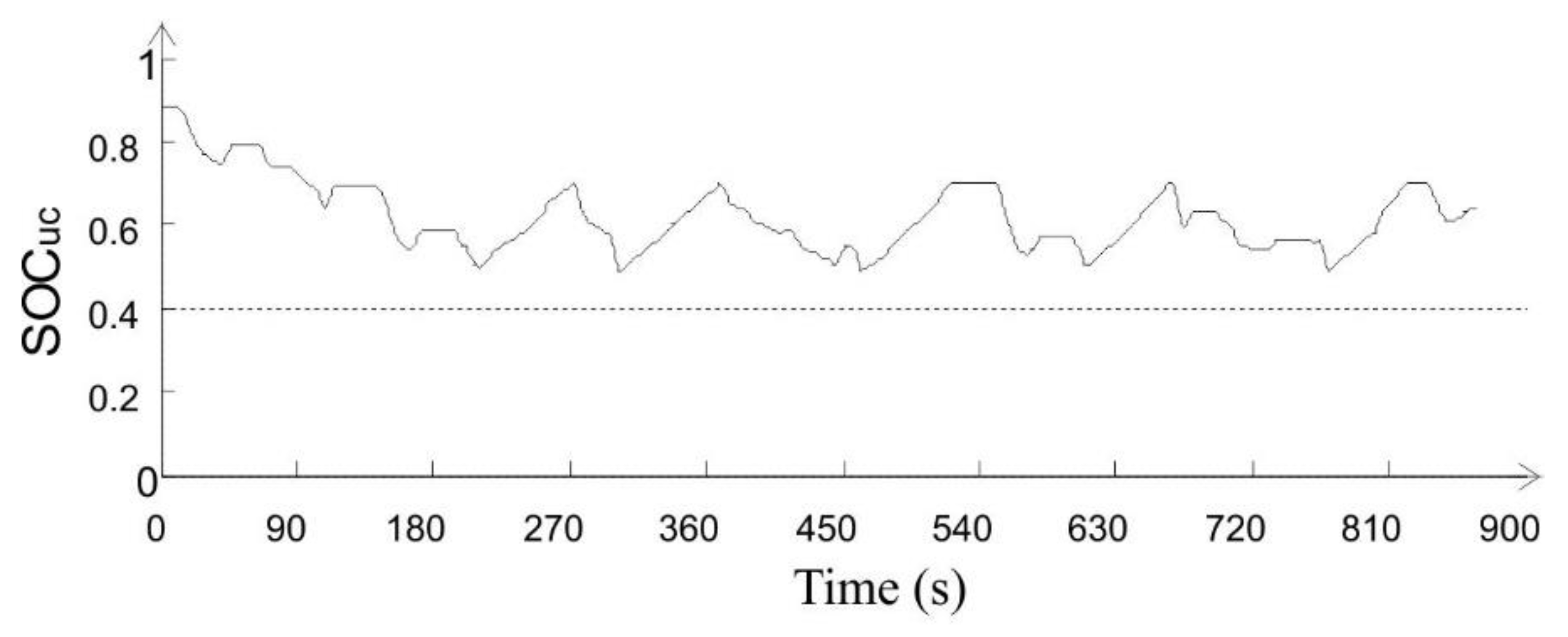
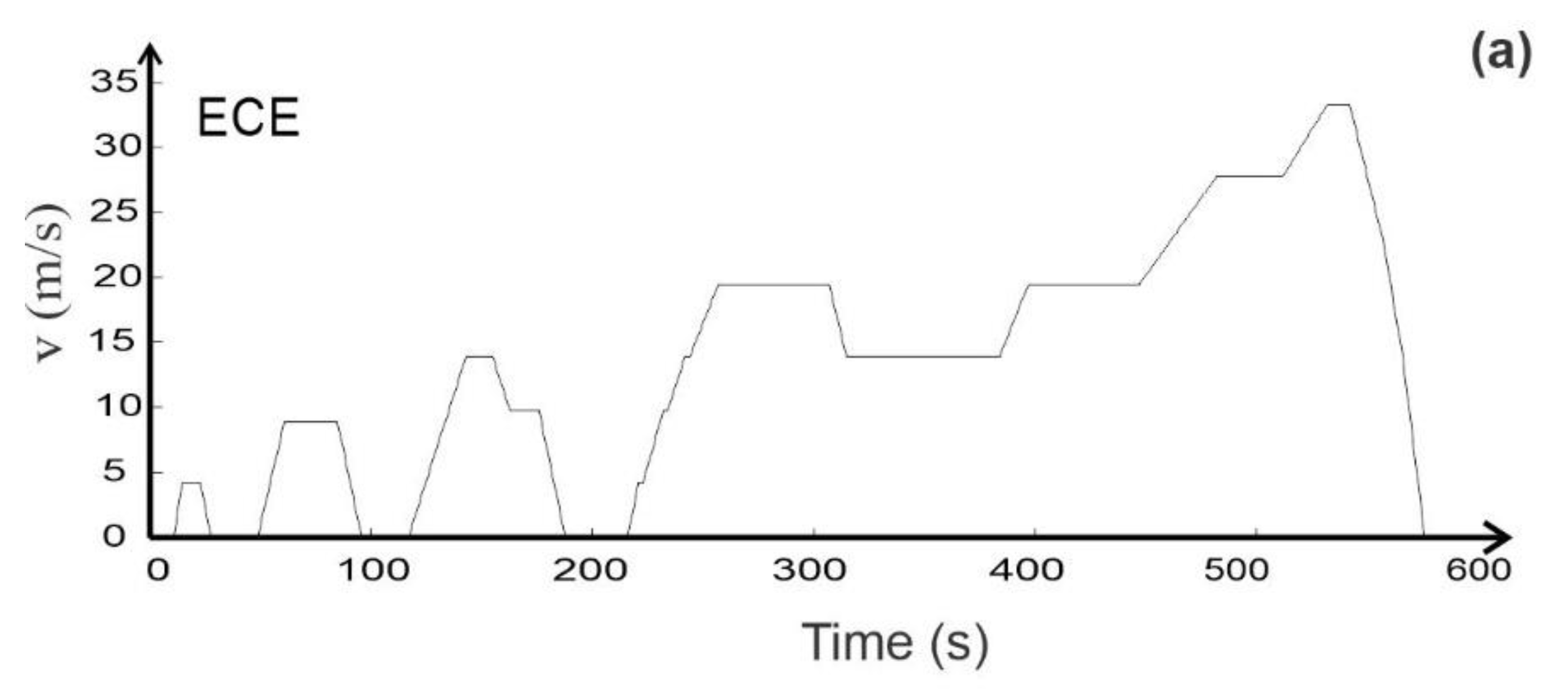
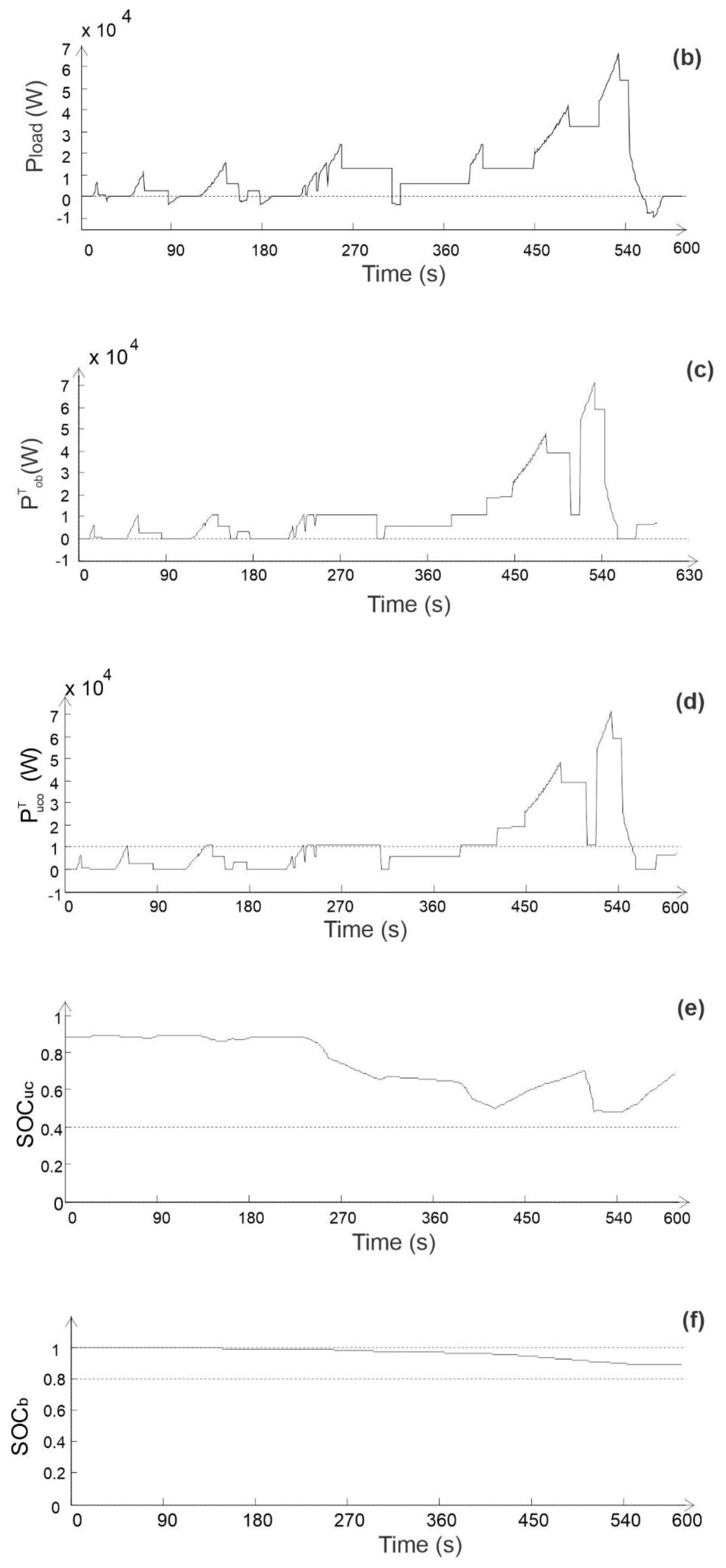
3.1. Simulation of the C-CM in the Vehicle Powertrain Under Two Terrain Conditions by Means of the CITY II and ECE Driving Cycles
3.2. Multiple Converter Configuration Versus Typical Configurations
3.3. Autonomy of the Multiple Converter Configuration Versus Typical Configurations
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Talluri, G.; Grasso, F.; Chiaramonti, D. Is Deployment of Charging Station the Barrier to Electric Vehicle Fleet Development in EU Urban Areas? An Analytical Assessment Model for Large Scale Municipality-Level EV Charging Infrastructures. Appl. Sci. 2019, 9, 4704. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y. Small-Signal Modeling and Analysis for a Wirelessly Distributed and Enabled Battery Energy Storage System of Electric Vehicles. Appl. Sci. 2019, 9, 4249. [Google Scholar] [CrossRef] [Green Version]
- Guzzella, L.; Antonio, S. Vehicle Propulsion System: Introduction to Modelling and Optimization; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2007. [Google Scholar]
- Wang, Z.; Cai, Y.; Zeng, Y.; Yu, J. Multi-Objective Optimization for Plug-In 4WD Hybrid Electric Vehicle Powertrain. Appl. Sci. 2019, 9, 4068. [Google Scholar] [CrossRef] [Green Version]
- Morales-Morales, J.; Cervantes, I.; Cano-Castillo, U. On the Design of Robust Energy Management Strategies for FCHEV. IEEE Trans. Veh. Technol. 2015, 64, 1716–1728. [Google Scholar] [CrossRef]
- Manoharan, Y.; Hosseini, S.E.; Butler, B.; Alzhahrani, H.; Senior, B.T.F.; Ashuri, T.; Krohn, J. Hydrogen Fuel Cell Vehicles; Current Status and Future Prospect. Appl. Sci. 2019, 9, 2296. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Jiang, X.; Jia, M.; Zheng, Y. Energy Management Strategy for the Hybrid Energy Storage System of Pure Electric Vehicle Considering Traffic Information. Appl. Sci. 2018, 8, 1266. [Google Scholar] [CrossRef] [Green Version]
- Kumar, M.S.; Revankar, S.T. Development scheme and key technology of an electric vehicle: An overview. Renew. Sustain. Energy Rev. 2017, 70, 1266–1285. [Google Scholar] [CrossRef]
- Híbridos y Eléctricos. Available online: http://www.hibridosyelectricos.com/estaticas/catalogo-de-vehiculos-hibridos-y-electricos (accessed on 5 March 2018).
- Heidrich, O.; Hill, G.A.; Neaimeh, M.; Huebner, Y.; Blythe, P.T.; Dawson, R.J. How do cities support electric vehicles and what difference does it make? Technol. Forecast. Soc. Chang. 2017, 123, 17–23. [Google Scholar] [CrossRef]
- Salisbury, M.; Toor, W. How and why leading utilities are embracing electric vehicles. Electr. J. 2016, 29, 22–27. [Google Scholar] [CrossRef]
- Moriarty, P.; Wang, S.J. Can Electric Vehicles Deliver Energy and Carbon Reductions? Energy Proc. 2017, 105, 2983–2988. [Google Scholar] [CrossRef] [Green Version]
- Du, J.; Ouyang, M.; Chen, J. Prospects for Chinese electric vehicle technologies in 2016–2020: Ambition and rationality. Energy 2017, 120, 584–596. [Google Scholar] [CrossRef]
- Armenta, J.; Núñez, C.; Visairo, N.; Lázaro, I. An advanced energy management system for controlling the ultracapacitor discharge and improving the electric vehicle range. J. Power Sour. 2015, 284, 452–458. [Google Scholar] [CrossRef]
- Cao, J.; Cao, B.; Bai, Z.; Chen, W. Energy-Regenerative Fuzzy Sliding Mode Controller Design for Ultracapacitor-Battery Hybrid Power of Electric Vehicle. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 1570–1575. [Google Scholar] [CrossRef]
- Cao, J.; Emadi, A. A New Battery/UltraCapacitor Hybrid Energy Storage System for Electric, Hybrid, and Plug-In Hybrid Electric Vehicles. IEEE Trans. Power Electron. 2012, 27, 122–132. [Google Scholar] [CrossRef]
- Rosario, L.; Luk, P.C.K. Applying Management Methodology to Electric Vehicles with Multiple Energy Storage Systems. In Proceedings of the 2007 International Conference on Machine Learning and Cybernetics, Hong Kong, China, 19–22 August 2007; Volume 7, pp. 4223–4230. [Google Scholar] [CrossRef]
- Zamora Gómez, G.I. Efecto de la topología del tren de potencia en la vida de las baterías. Master’s Thesis, Instituto Potosino de Investigación Cientifica y Tecnologica, San Luis Potosí México, 5 January 2015. Available online: http://hdl.handle.net/11627/2852 (accessed on 10 May 2016).
- Rashid, M.H. Power Electronics—Devices, Circuits and Applications; Pearson Publishing: New York, NY, USA, 2014; ISBN-10 0133125904, ISBN-13 9780133125900. [Google Scholar]
- Galdi, V.; Piccolo, A.; Siano, P. A Fuzzy Based Safe Power Management Algorithm for Energy Storage Systems in Electric Vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Windsor, UK, 6–8 September 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Barlow, T.; Latham, S.; Mccrae, I.; Boulter, P. A Reference Book of Driving Cycles for Use in the Measurement of Road Vehicle Emissions; Version 3; Automobiles, IHS: London, UK, 2009; p. 276. [Google Scholar]
- Einhorn, M.; Kral, C.; Fleig, J. Comparison, Selection, and Parameterization of Electrical Battery Models for Automotive Applications. IEEE Trans. Power Electron. 2013, 28, 1429–1437. [Google Scholar] [CrossRef]
- Nelms, R.M.; Cahela, D.R.; Tatarchuk, B.J. Modeling double-layer capacitor behavior using ladder circuits. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 430–438. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Air density | 1.18 |
| Rolling resistance coefficient | 0.014 |
| Transmission ratio | 3 |
| Crag coefficient | 0.5 |
| Frontal area | 3.225 |
| Gravity | 9.8 |
| Tire radius | 0.2651 |
| Battery: Valence Model U1–12xp | UC: BMOD0165–Maxwell Model | ||
|---|---|---|---|
| = 1 | |||
| = 4 | |||
| = 12.8V | = 5 | = 2 | (to) = 0.8858 |
| = 5 | |||
| Load: Curtis Motor 1236-6501 (72 V, 550 A) | |||
| Converter | |||
| Conditions | Power Delivered by the Battery Converter | Power Delivered by the UC Converter |
|---|---|---|
| - | ||
| - | ||
| - | ||
| - |
| CITY Driving Cycle | |||
| C-MC | C-B/UC | C-UC/B | |
| 1.4289 | 1.4289 | 1.4289 | |
| 1.5266 | 1.3740 | 1.3679 | |
| 0.0307 | 0.0307 | 0.0307 | |
| 0.3165 | 0.2563 | 0.2552 | |
| ECE Driving Cycle | |||
| C-MC | C-B/UC | C-UC/B | |
| 6.8254 | 5.9617 | 5.5394 | |
| 3.0364 | 1.0506 | 9.7406 | |
| 0.1138 | 0.0999 | 0.0927 | |
| 0.1979 | 0.1947 | 0.1826 | |
| Autonomy | C-MC | C-B/UC | C-UC/B |
|---|---|---|---|
| CITY II cycle (km) | 77.285 | 77.357 | 86.159 |
| ECE cycle (km) | 74.44 | 85.900 | 88.151 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morales-Morales, J.; Rivera-Cruz, M.A.; Cruz-Alcantar, P.; Bautista Santos, H.; Cervantes-Camacho, I.; Reyes Herrera, V.A. Performance Analysis of a Hybrid Electric Vehicle with Multiple Converter Configuration. Appl. Sci. 2020, 10, 1074. https://doi.org/10.3390/app10031074
Morales-Morales J, Rivera-Cruz MA, Cruz-Alcantar P, Bautista Santos H, Cervantes-Camacho I, Reyes Herrera VA. Performance Analysis of a Hybrid Electric Vehicle with Multiple Converter Configuration. Applied Sciences. 2020; 10(3):1074. https://doi.org/10.3390/app10031074
Chicago/Turabian StyleMorales-Morales, Josefa, Miguel A. Rivera-Cruz, Pedro Cruz-Alcantar, Horacio Bautista Santos, Ilse Cervantes-Camacho, and Vladimir A. Reyes Herrera. 2020. "Performance Analysis of a Hybrid Electric Vehicle with Multiple Converter Configuration" Applied Sciences 10, no. 3: 1074. https://doi.org/10.3390/app10031074