Smart Route: Internet-of-Vehicles (IoV)-Based Congestion Detection and Avoidance (IoV-Based CDA) Using Rerouting Planning


Abstract
:1. Introduction
- We proposed IoV-based CDA for a particular road intersection highly vulnerable to massive traffic jams using two prominent parameters, i.e., the occupancy rate and occupancy time. We assessed our proposed scheme through simulation and noted that it reduced path cost and travel time as compared to the no-rerouting scheme (i.e., MCDP) significantly.
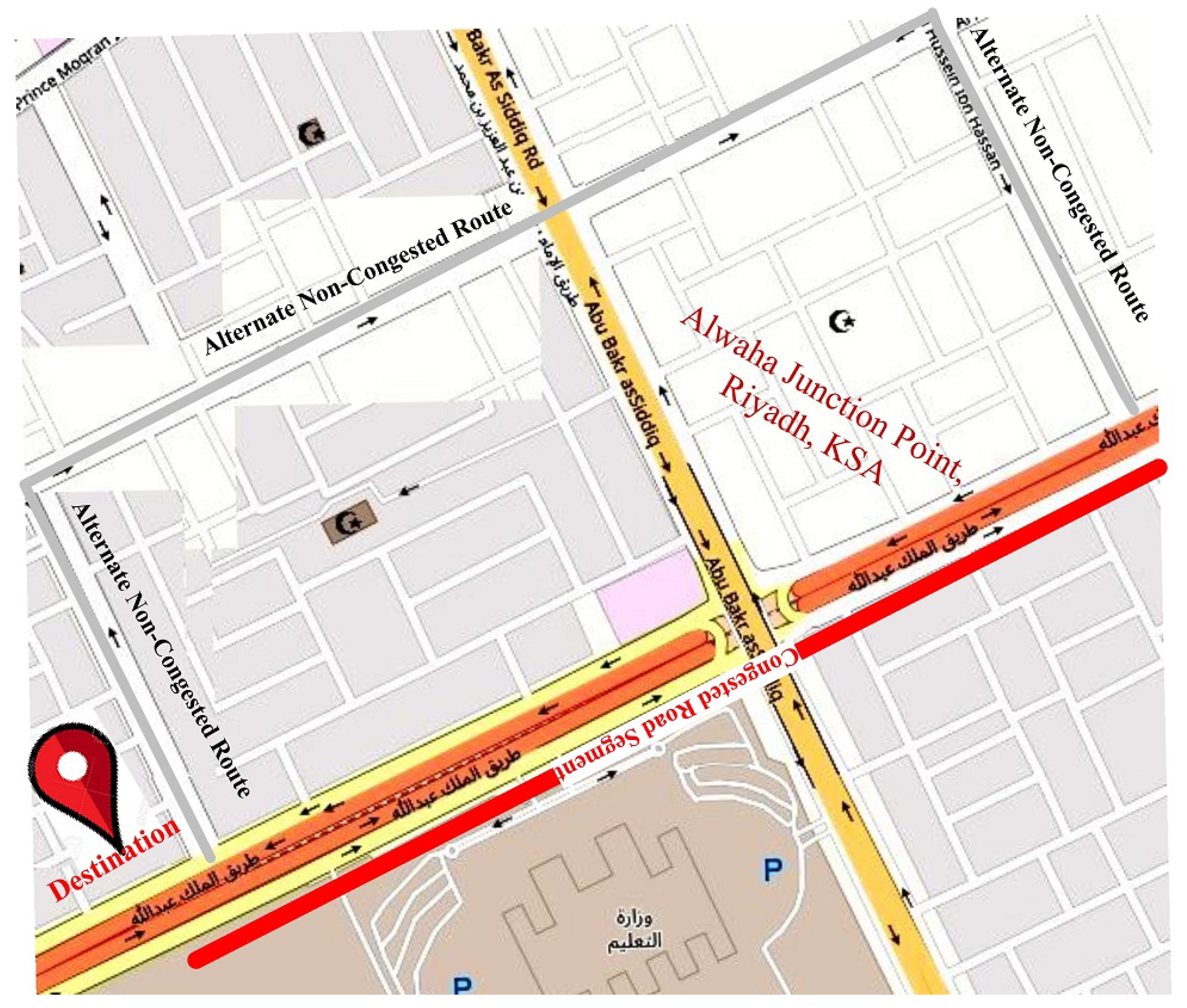
- Secondly, our proposed IoV-based CDA employed rerouting to assess the traffic load of any alternate route before selection. Thus, it prevents traffic jams migration from one place to another. Lastly, we measured the robustness of our proposed IoV-based CDA by investigating under different levels of congestion (i.e., low, medium, high, and massive) scenarios.
2. System Model
3. Proposed Smart Route: IoV-Based Congestion Detection and Avoidance (CDA) Using Rerouting
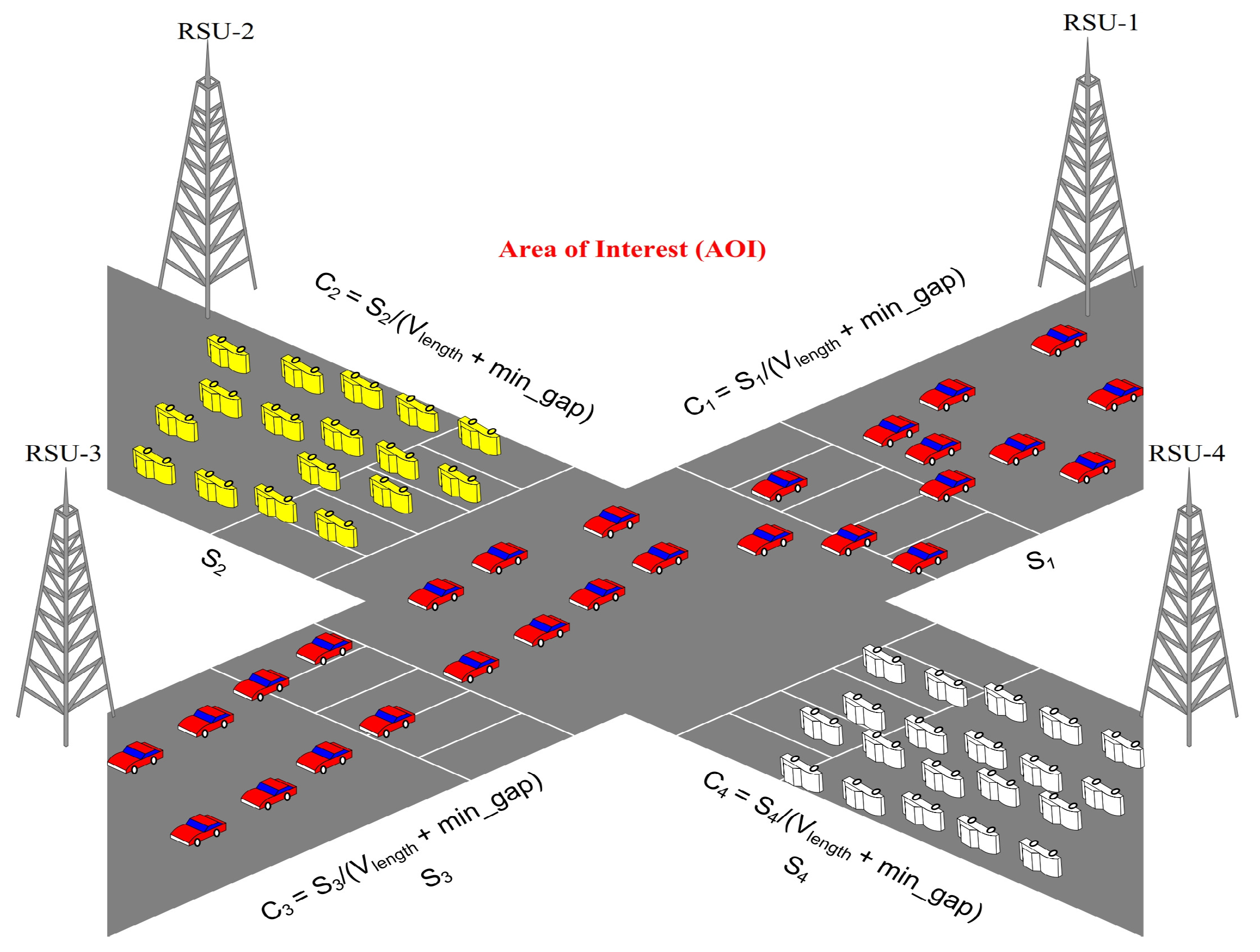
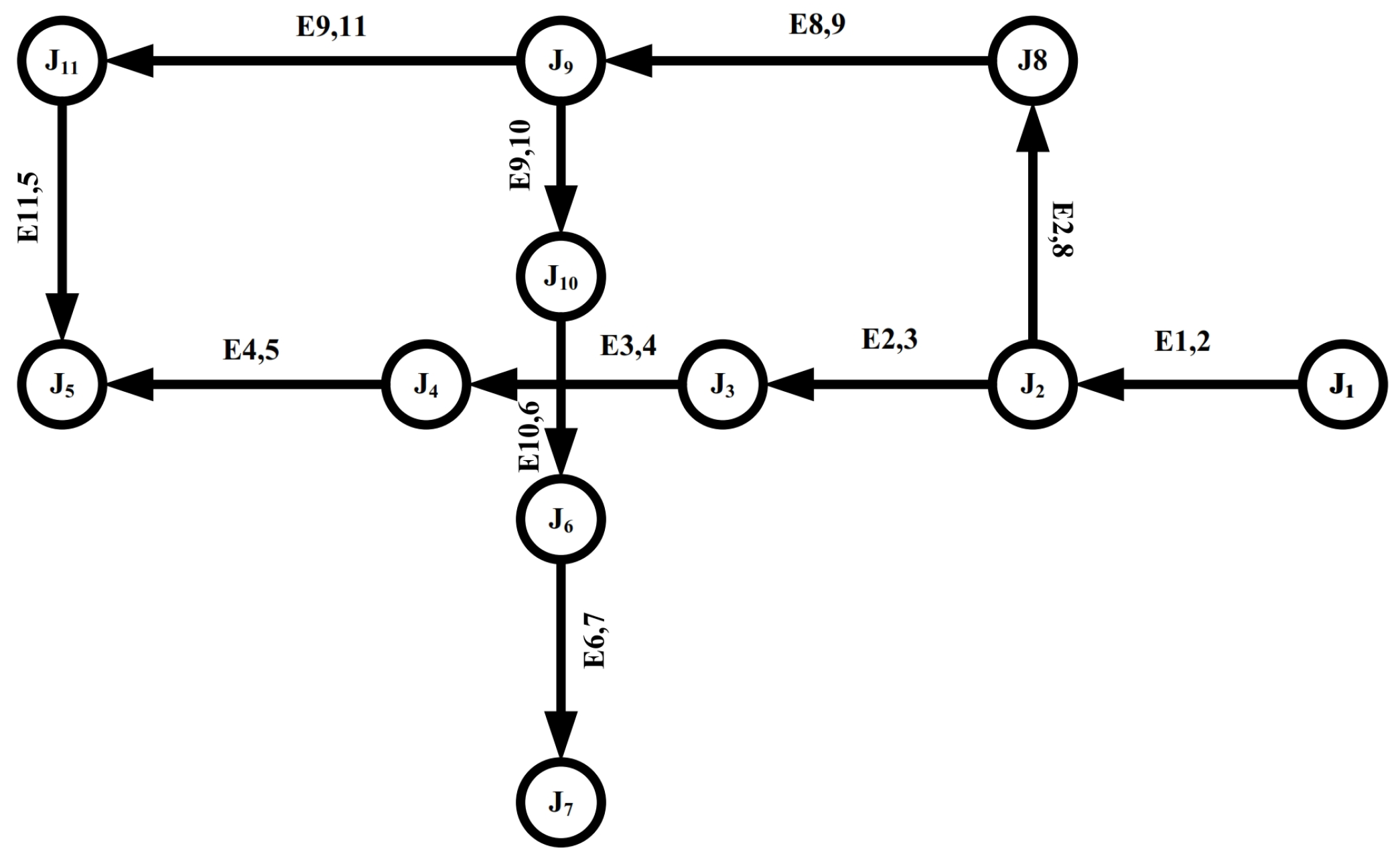
3.1. Conversion of Area of Interest (AOI) or Road Intersection to Routing Graph
3.2. IoV-Based Congestion Detection (IoV-Based CD)
| Algorithm 1: IoV-based Congestion Detection (executed at RSU). |
|
3.3. IoV-Based Congestion Avoidance (IoV-Based CA)
| Algorithm 2: Smart Route: IoV-based Congestion Avoidance (executed at RSU). |
|
4. Experimental Results and Discussions
4.1. Simulation Environment
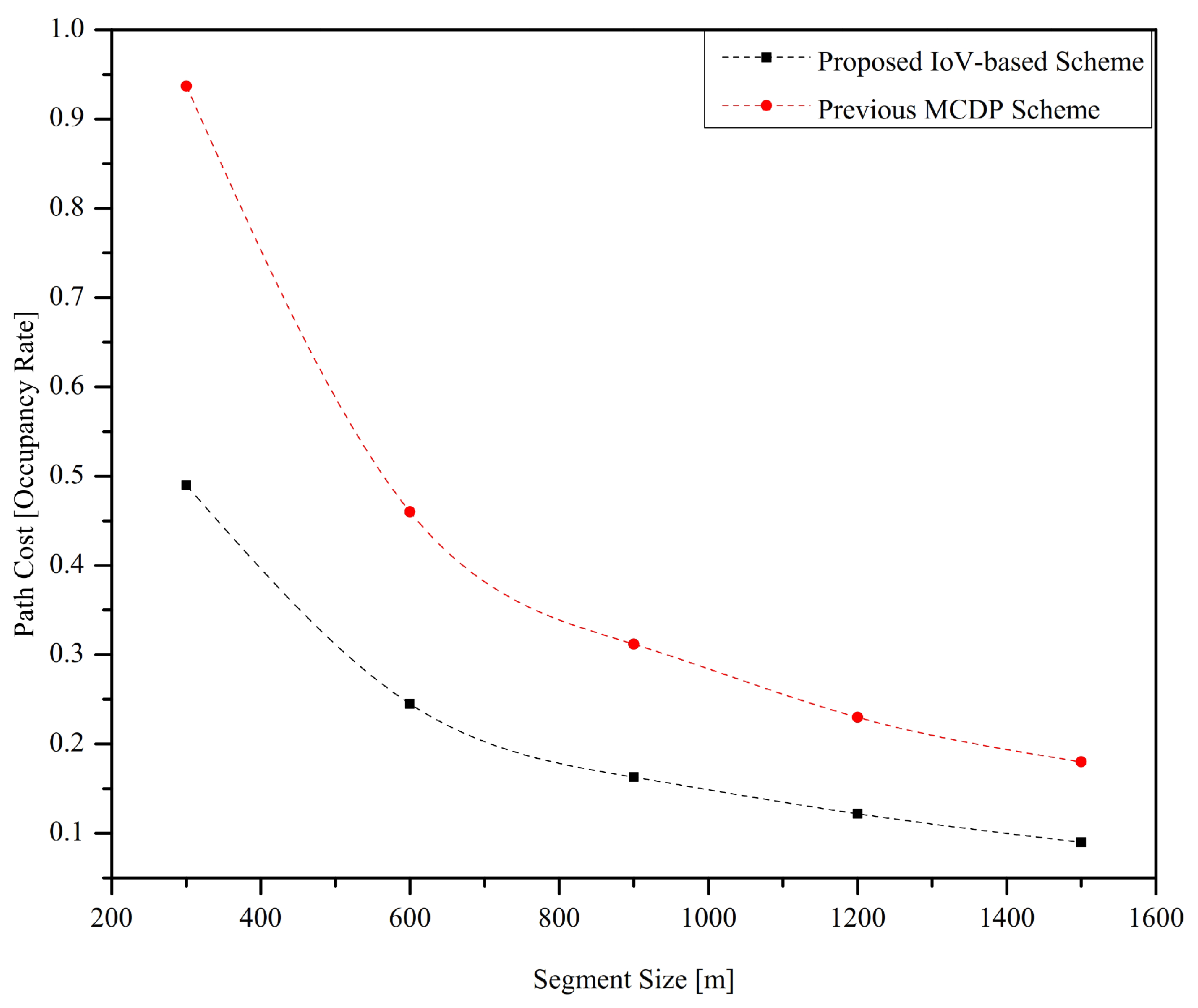
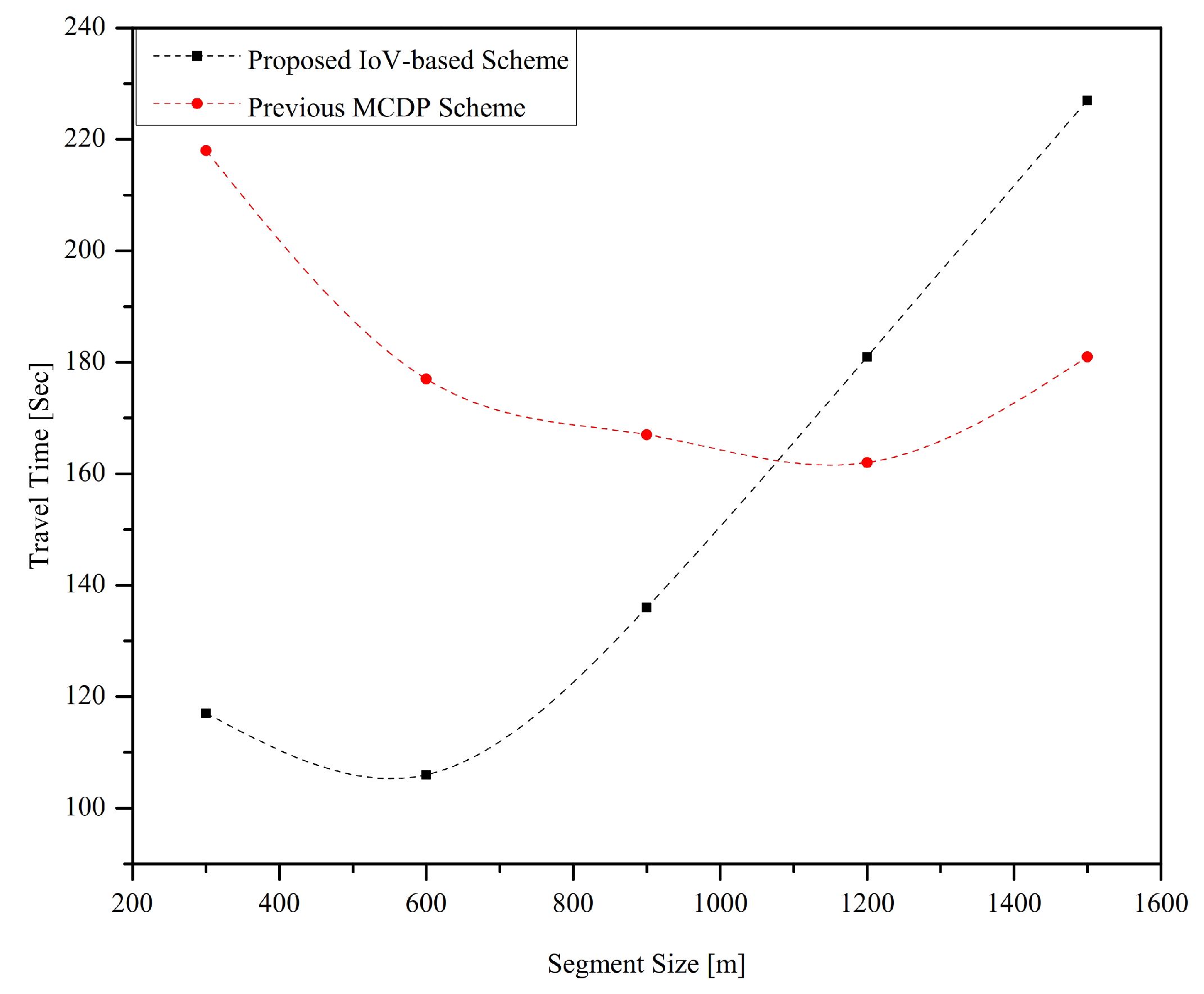
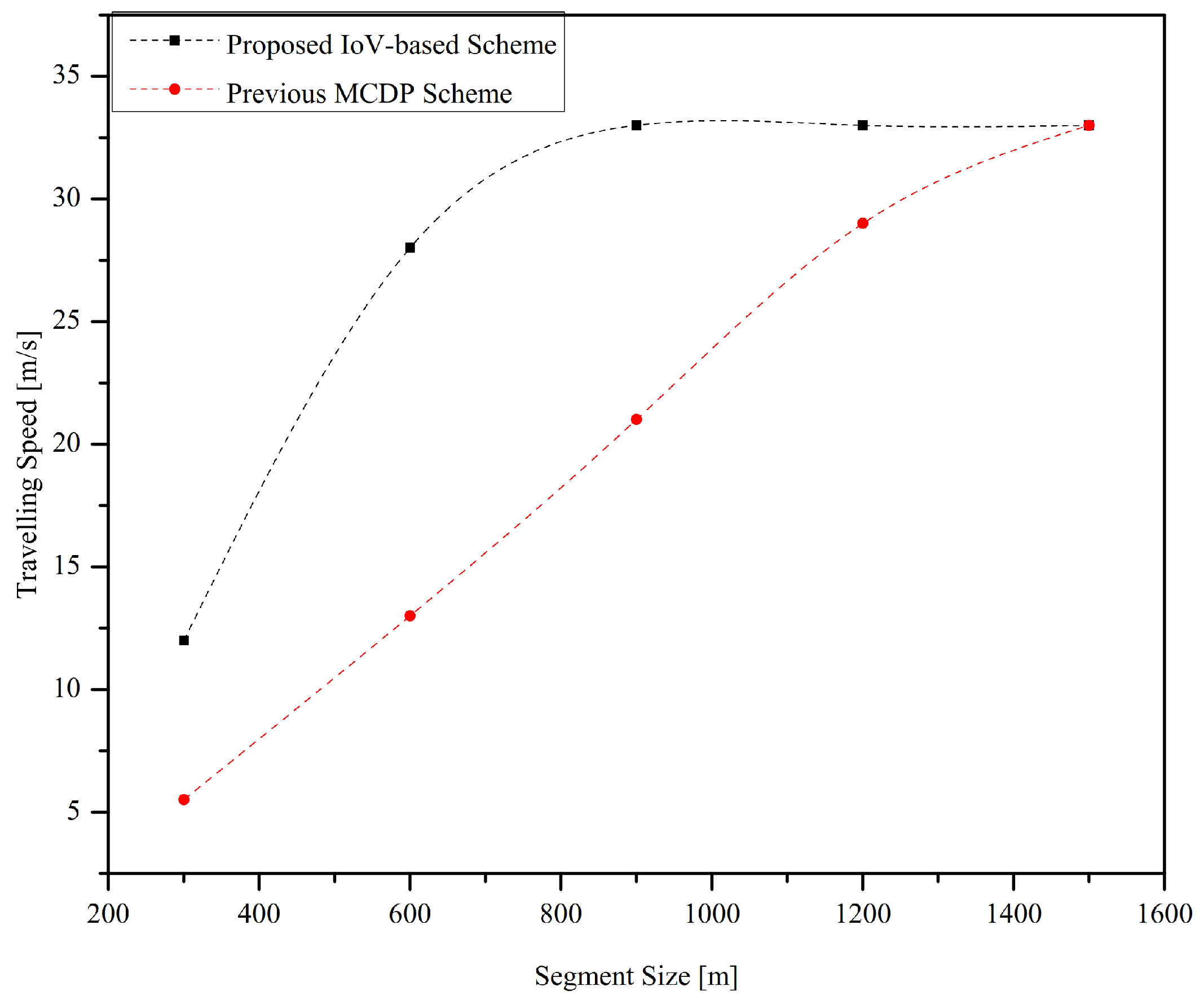
- Experiment A: The first experiment is about the impact of various segment sizes (i.e., from 300 m to 1500 m) over the performance of IoV-based CDA. The number of vehicles for each road segment is kept constant for all segmental sizes.
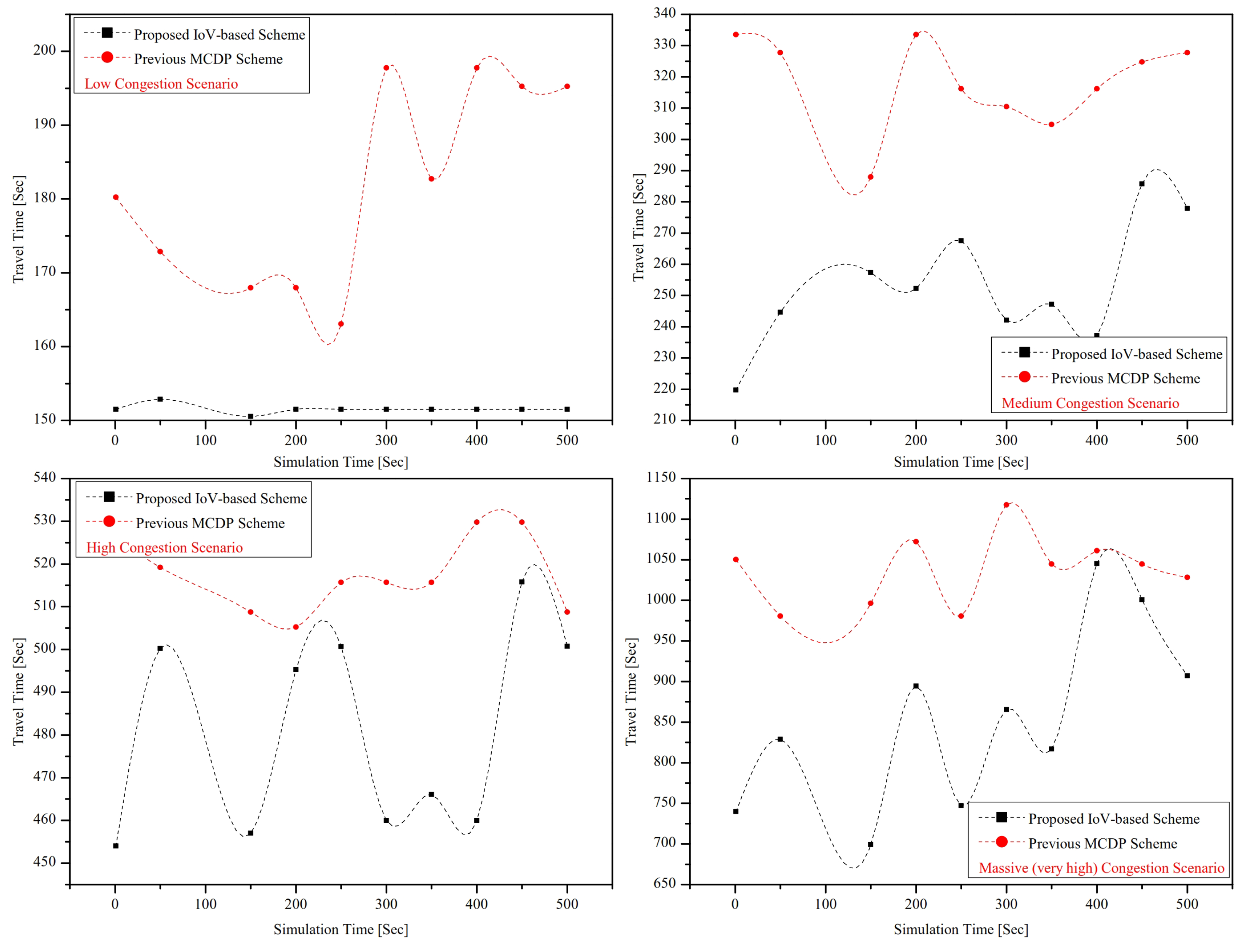
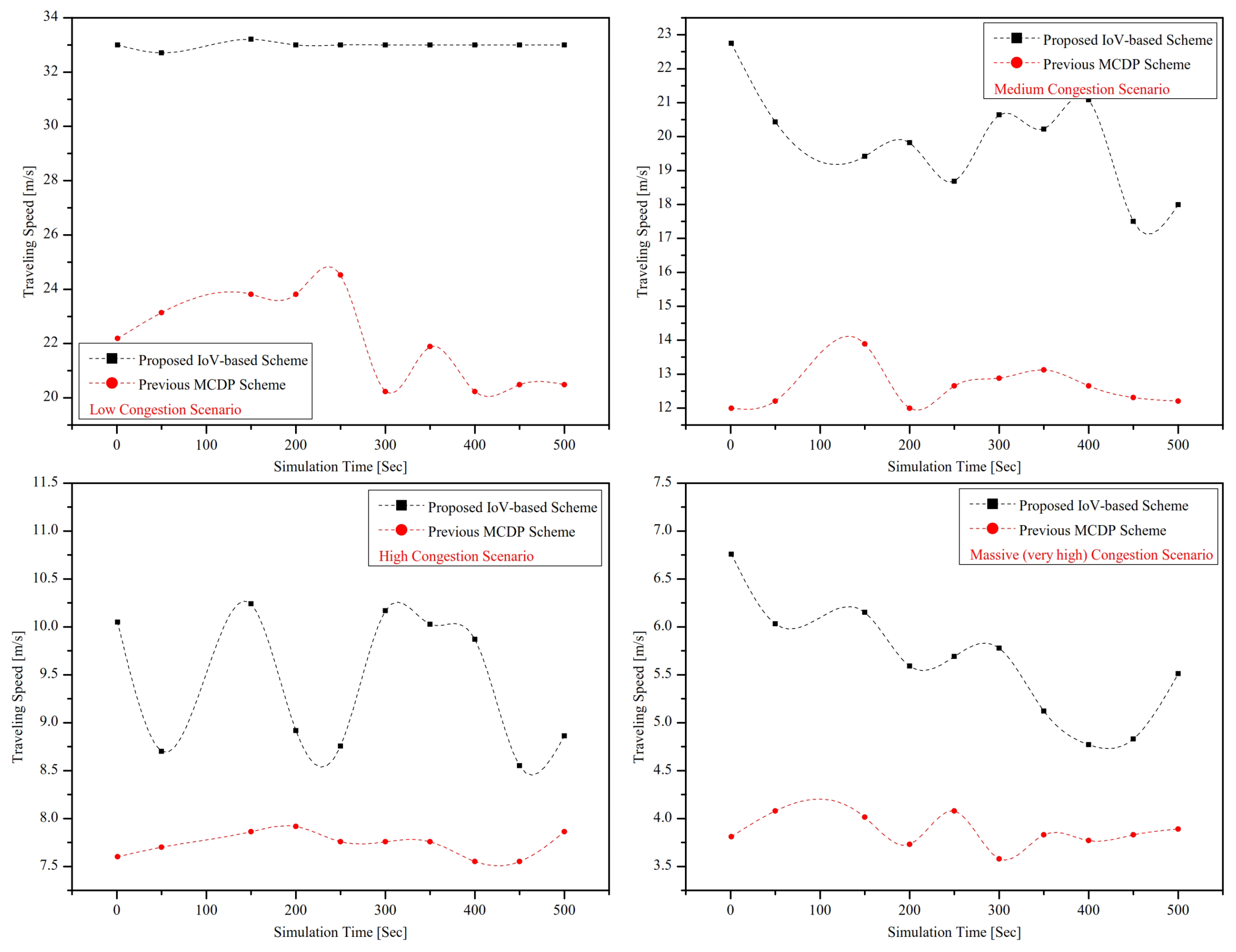
- Experiment B: The performance of IoV-based CDA is assessed under various traffic conditions. Four different traffic conditions are considered in ONE-kilometer long road’s segment, i.e., low traffic congestion (5–20 vehicles), medium traffic congestion (20–40 vehicles), high traffic congestion (40–60 vehicles), and massive (very high) traffic congestion (60–100 vehicles).
- Definition of Path cost/Occupancy level: It is the ratio of the current number of vehicles to the total capacity of the road’s segment. This metric represents the level of congestion of a given segment. The higher the value of path cost, the greater will be the congestion level. This metric can also be used to measure throughput. Throughput refers to the number of vehicles reached successfully to their destination.
- Definition of Travel time: This metric represents the time during which the source vehicle reaches the destination. The mathematical definition of travel time isThe travel time T depends on segment length , number of segments as well as the speed limit . The appropriate speed on each segment is also depended on the congestion level.
- Definition of Travelling speed: It is the speed in which the vehicles can travel without collision. In safety travelling, speed can be calculated as below:where and represent the inter-vehicle spacing and safety time to cover the inter-distance, respectively. The performance metrics, as mentioned earlier, are calculated under different specifications.
4.2. Impact of AOI’s Size on IoV-Based CDA Scheme Performance
4.3. Impact of Congestion Level on IoV-Based CDA Scheme Performance
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Al-Turjman, F.; Ever, E.; Zahmatkesh, H. Small cells in the forthcoming 5G/IoT: Traffic modelling and deployment overview. IEEE Commun. Surv. Tutor. 2018, 21, 28–65. [Google Scholar] [CrossRef]
- Hopkins, J.L.; McKay, J. Investigating ‘anywhere working’as a mechanism for alleviating traffic congestion in smart cities. Technol. Forecast. Soc. Chang. 2019, 142, 258–272. [Google Scholar] [CrossRef]
- Vardhana, M.; Arunkumar, N.; Abdulhay, E.; Vishnuprasad, P. Iot based real time trafic control using cloud computing. Clust. Comput. 2019, 22, 2495–2504. [Google Scholar] [CrossRef]
- Pan, J.; Popa, I.S.; Zeitouni, K.; Borcea, C. Proactive vehicular traffic rerouting for lower travel time. IEEE Trans. Veh. Technol. 2013, 62, 3551–3568. [Google Scholar] [CrossRef] [Green Version]
- Qi, L.; Zhou, M.; Luan, W. A dynamic road incident information delivery strategy to reduce urban traffic congestion. IEEE/CAA J. Autom. Sin. 2018, 5, 934–945. [Google Scholar] [CrossRef]
- Wang, L.; Lu, J. A memetic algorithm with competition for the capacitated green vehicle routing problem. IEEE/CAA J. Autom. Sin. 2019, 6, 516–526. [Google Scholar] [CrossRef]
- Ning, Z.; Hu, X.; Chen, Z.; Zhou, M.; Hu, B.; Cheng, J.; Obaidat, M.S. A cooperative quality-aware service access system for social Internet of vehicles. IEEE Internet Things J. 2017, 5, 2506–2517. [Google Scholar] [CrossRef]
- Li, Y.; Chu, F.; Feng, C.; Chu, C.; Zhou, M. Integrated production inventory routing planning for intelligent food logistics systems. IEEE Trans. Intell. Transp. Syst. 2018, 20, 867–878. [Google Scholar] [CrossRef]
- Suryakala, S.; Muthumeenakshi, K.; Gladwin, S.J. Vision based Vehicle/Pedestrian Detection in Traffic Surveillance System. In Proceedings of the 2019 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India, 4–6 April 2019; pp. 506–510. [Google Scholar]
- Mishra, S.; Bhattacharya, D.; Gupta, A. Congestion Adaptive Traffic Light Control and Notification Architecture Using Google Maps APIs. Data 2018, 3, 67. [Google Scholar] [CrossRef] [Green Version]
- Sari, R.F.; Rochim, A.F.; Tangkudung, E.; Tan, A.; Marciano, T. Location-based mobile application software development: Review of waze and other apps. Adv. Sci. Lett. 2017, 23, 2028–2032. [Google Scholar] [CrossRef]
- Sommer, C.; Schmidt, A.; Chen, Y.; German, R.; Koch, W.; Dressler, F. On the feasibility of UMTS-based traffic information systems. Ad Hoc Netw. 2010, 8, 506–517. [Google Scholar] [CrossRef]
- Tavafoghi, H.; Shetty, A.; Poolla, K.; Varaiya, P. Strategic Information Platforms in Transportation Networks. In Proceedings of the 2019 57th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 24–27 September 2019; pp. 816–823. [Google Scholar]
- Jan, B.; Farman, H.; Khan, M.; Talha, M.; Din, I.U. Designing a Smart Transportation System: An Internet of Things and Big Data Approach. IEEE Wirel. Commun. 2019, 26, 73–79. [Google Scholar] [CrossRef]
- Wang, R.; Xu, Z.; Zhao, X.; Hu, J. V2V-based method for the detection of road traffic congestion. IET Intell. Transp. Syst. 2019, 13, 880–885. [Google Scholar] [CrossRef]
- Chen, B.S.; Lee, M.Y. Non-cooperative and Cooperative Strategy Design for Nonlinear Stochastic Jump Diffusion Systems With External Disturbance: TS Fuzzy Approach. IEEE Trans. Fuzzy Syst. 2019, 1–15. [Google Scholar] [CrossRef]
- Amer, H.M.; Tsotskas, C.; Hawes, M.; Franco, P.; Mihaylova, L. A game theory approach for congestion control in vehicular ad hoc networks. In Proceedings of the 2017 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 10–12 October 2017; pp. 1–6. [Google Scholar]
- Cao, Z.; Jiang, S.; Zhang, J.; Guo, H. A unified framework for vehicle rerouting and traffic light control to reduce traffic congestion. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1958–1973. [Google Scholar] [CrossRef]
- de Souza, A.M.; Yokoyama, R.S.; Maia, G.; Loureiro, A.; Villas, L. Real-time path planning to prevent traffic jam through an intelligent transportation system. In Proceedings of the 2016 IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016; pp. 726–731. [Google Scholar]
- Ahmad, M.; Chen, Q.; Khan, Z. Microscopic Congestion Detection Protocol in VANETs. J. Adv. Transp. 2018, 2018, 1–14. [Google Scholar] [CrossRef]
- Punzo, V.; Montanino, M.; Ciuffo, B. Do we really need to calibrate all the parameters? Variance-based sensitivity analysis to simplify microscopic traffic flow models. IEEE Trans. Intell. Transp. Syst. 2014, 16, 184–193. [Google Scholar] [CrossRef]
- Ahmad, M.; Chen, Q.; Khan, Z.; Ahmad, M.; Khurshid, F. Infrastructure-based vehicular congestion detection scheme for V2I. Int. J. Commun. Syst. 2019, 32, e3877. [Google Scholar] [CrossRef]
- Gai, K.; Choo, K.K.R.; Qiu, M.; Zhu, L. Privacy-preserving content-oriented wireless communication in internet-of-things. IEEE Internet Things J. 2018, 5, 3059–3067. [Google Scholar] [CrossRef]
- Siddiqua, A.; Shah, M.A.; Khattak, H.A.; Din, I.U.; Guizani, M. iCAFE: Intelligent Congestion Avoidance and Fast Emergency services. Future Gener. Comput. Syst. 2019, 99, 365–375. [Google Scholar] [CrossRef]
- Yaqoob, S.; Ullah, A.; Akbar, M.; Imran, M.; Shoaib, M. Congestion avoidance through fog computing in internet of vehicles. J. Ambient. Intell. Humaniz. Comput. 2019, 10, 3863–3877. [Google Scholar] [CrossRef]
- Younes, M.B.; Boukerche, A. Safety and efficiency control protocol for highways using intelligent vehicular networks. Computer Netw. 2019, 152, 1–11. [Google Scholar] [CrossRef]
- Qian, Y.; Wu, D.; Bao, W.; Lorenz, P. The internet of things for smart cities: Technologies and applications. IEEE Netw. 2019, 33, 4–5. [Google Scholar] [CrossRef]
- Asghar, M.H.; Negi, A.; Mohammadzadeh, N. Principle application and vision in Internet of Things (IoT). In Proceedings of the International Conference on Computing, Communication & Automation, Noida, India, 15–16 May 2015; pp. 427–431. [Google Scholar]
- Farman, H.; Jan, B.; Khan, Z.; Koubaa, A. A smart energy-based source location privacy preservation model for Internet of Things-based vehicular ad hoc networks. Trans. Emerg. Telecommun. Technol. 2020, 1–14. [Google Scholar] [CrossRef]
- Khattak, H.A.; Farman, H.; Jan, B.; Din, I.U. Toward integrating vehicular clouds with IoT for smart city services. IEEE Netw. 2019, 33, 65–71. [Google Scholar] [CrossRef]
- Devi, S.; Neetha, T. Machine Learning based traffic congestion prediction in a IoT based Smart City. Int. Res. J. Eng. Technol. 2017, 4, 3442–3445. [Google Scholar]
- Javaid, S.; Sufian, A.; Pervaiz, S.; Tanveer, M. Smart traffic management system using Internet of Things. In Proceedings of the 2018 20th International Conference on Advanced Communication Technology (ICACT), Chuncheon-si Gangwon-do, Korea, 11–14 February 2018; pp. 393–398. [Google Scholar]
- Al-Sakran, H.O. Intelligent traffic information system based on integration of Internet of Things and Agent technology. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 37–43. [Google Scholar]
- Backfrieder, C.; Ostermayer, G.; Mecklenbrauker, C.F. Increased Traffic Flow Through Node-Based Bottleneck Prediction and V2X Communication. IEEE Trans. Intell. Transp. Syst. 2017, 18, 349–363. [Google Scholar] [CrossRef]
- Khan, Z.; Fan, P.; Fang, S.; Abbas, F. An Unsupervised Cluster-Based VANET-Oriented Evolving Graph (CVoEG) Model and Associated Reliable Routing Scheme. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3844–3859. [Google Scholar] [CrossRef]
- Eiza, M.H.; Ni, Q. An evolving graph-based reliable routing scheme for VANETs. IEEE Trans. Veh. Technol. 2013, 62, 1493–1504. [Google Scholar] [CrossRef]
- Fernandes, P.; Vilaça, M.; Macedo, E.; Sampaio, C.; Bahmankhah, B.; Bandeira, J.; Guarnaccia, C.; Rafael, S.; Fernandes, A.; Relvas, H.; et al. Integrating road traffic externalities through a sustainability indicator. Sci. Total. Environ. 2019, 691, 483–498. [Google Scholar] [CrossRef]
- Samir, M.; Sharafeddine, S.; Assi, C.; Nguyen, T.M.; Ghrayeb, A. Trajectory Planning and Resource Allocation of Multiple UAVs for Data Delivery in Vehicular Networks. IEEE Netw. Lett. 2019, 1, 107–110. [Google Scholar] [CrossRef]
- Khan, Z.; Fan, P.; Fang, S. On the connectivity of vehicular ad hoc network under various mobility scenarios. IEEE Access 2017, 5, 22559–22565. [Google Scholar] [CrossRef]
- Thonhofer, E.; Jakubek, S. Investigation of stochastic variation of parameters for a macroscopic traffic model. J. Intell. Transp. Syst. 2018, 22, 547–564. [Google Scholar] [CrossRef]
- van Heeswijk, W.; Mes, M.; Schutten, M. Transportation Management. In Operations, Logistics and Supply Chain Management; Springer: Berlin/Heidelberg, Germany, 2019; pp. 469–491. [Google Scholar]
- Behnood, A.; Mannering, F.L. The temporal stability of factors affecting driver-injury severities in single-vehicle crashes: Some empirical evidence. Anal. Methods Accid. Res. 2015, 8, 7–32. [Google Scholar] [CrossRef]
- Kendziorra, A.; Weber, M. Public Transport, Logistics and Rail Traffic Extensions in SUMO. In Simulating Urban Traffic Scenarios; Springer: Berlin/Heidelberg, Germany, 2019; pp. 83–95. [Google Scholar]
- Ferster, C.; Fischer, J.; Manaugh, K.; Nelson, T.; Winters, M. Using OpenStreetMap to inventory bicycle infrastructure: A comparison with open data from cities. Int. J. Sustain. Transp. 2019, 1–10. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| No. of segments | 13 |
| No. of junctions | 9 |
| Length of vehicle | 5 m |
| Minimum safety gap | 10 m |
| Time headway | 2s |
| Occupancy rate threshold | 0.7 |
| Occupancy time | 0.6 s |
| Segment length | [300 m, 600 m, 900 m, 1200 m, 1500 m] |
| Congestion levels | Low, Medium, High, Massive (very high) |
| Low congestion | 5–20 vehicles |
| Medium congestion | 20–40 vehicles |
| High congestion | 40–60 vehicles |
| Massive congestion | 60–100 vehicles |
| Simulation time | 500 s |
| RSU coverage | 1000 m |
| MAC protocol | IEEE 802.11p |
| Propagation model | Two ray-ground |
| Scenarios types | 2 (varying segment size, temporal simulation) |
| Performance metrics | Path cost, Travel time, Travelling time |
| No. of lanes | 2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, Z.; Koubaa, A.; Farman, H. Smart Route: Internet-of-Vehicles (IoV)-Based Congestion Detection and Avoidance (IoV-Based CDA) Using Rerouting Planning. Appl. Sci. 2020, 10, 4541. https://doi.org/10.3390/app10134541
Khan Z, Koubaa A, Farman H. Smart Route: Internet-of-Vehicles (IoV)-Based Congestion Detection and Avoidance (IoV-Based CDA) Using Rerouting Planning. Applied Sciences. 2020; 10(13):4541. https://doi.org/10.3390/app10134541
Chicago/Turabian StyleKhan, Zahid, Anis Koubaa, and Haleem Farman. 2020. "Smart Route: Internet-of-Vehicles (IoV)-Based Congestion Detection and Avoidance (IoV-Based CDA) Using Rerouting Planning" Applied Sciences 10, no. 13: 4541. https://doi.org/10.3390/app10134541