The Elastic Wave Propagation in Rectangular Waveguide Structure: Determination of Dispersion Curves and Their Application in Nondestructive Techniques

 , , and
, , and
Abstract
:1. Introduction
2. Propagation on Stems with Rectangular Section
2.1. Analytical Models of Wave Propagation in Waveguides
2.2. Semi-Analytical Models to Build the Dispersion Curves
3. Experimental Analyses
- -
- A bar, made of ABNT 1020 steel [37], with dimensions of 5 × 15 × 1500 [mm] used as waveguide.
- -
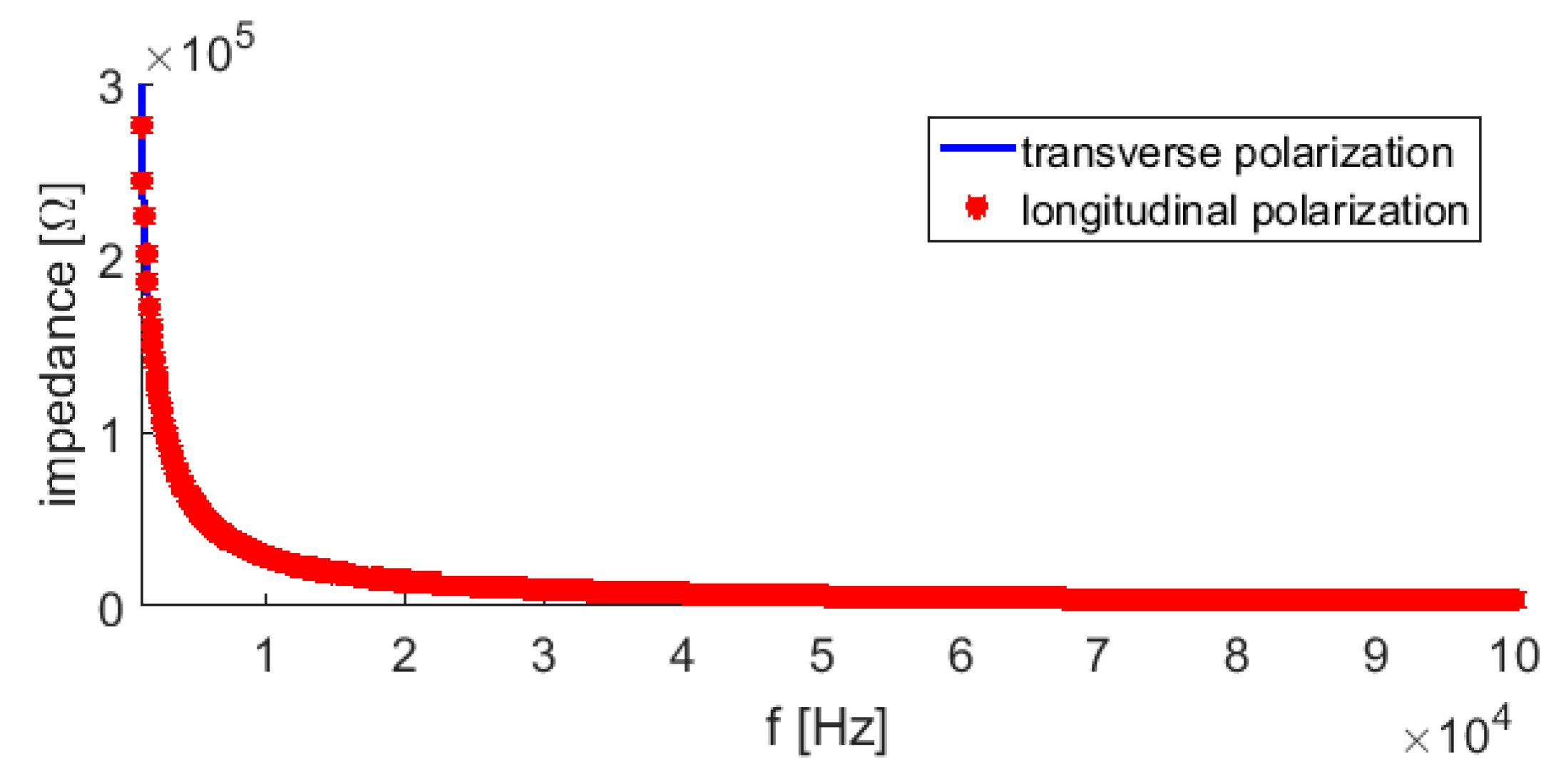
- Two piezoelectric ceramics (PZT) Ferroperm®, with dimensions 1 × 3 × 13 [mm] and longitudinal and perpendicular polarizations which were used as an excitation transducer. Its frequency vs. Impedance response is presented in Figure 8, where it is possible to perceive that in the interval of frequency used [0, 100 KHz], these transductors present a response without resonances for the longitudinal and transversal polarization.
- -
- A function generator Agilient (Keysight) 33,521, used to create an excitation signal that applies a potential difference to the piezoelectric ceramics transducer; a voltage amplifier Krohn–Hite 7500 used to amplify the excitation signal emitted for the function generator.
- -
- Two vibrometers Polytec® OFV-505, linked with Polytec® OFV-5000 controller, used as sensors to measure the surface displacement of the specimen.
- -
4. Results
4.1. Comparison between Experimental Results and the Results Obtained by SAFE Based on Sorohan et al.
4.2. Comparison among Different Theoretical Methods Used to Build the Dispersion Curves
5. Parametric Study on the Rectangular Rod
- -
- The longitudinal propagation mode has a small dependence on the waveguide transversal geometry. The only geometric parameter that influences the longitudinal propagation mode is the lateral inertia due to the Poisson effect [11];
- -
- Torsional mode decreases its propagation speed (c = f/k) when the section base/height ratio increases, as well as the curve derivative becoming more dispersive;
- -
- The bending wave mode associated with the smaller moment of inertia will have the slower propagation speed and will be more dispersive;
- -
- Cut-off frequencies of the non-fundamental modes decrease when the inertial moment of the waveguide transversal section decreases;
- -
- In all cases, there is a general tendency in the curve dispersion behavior: when the stiffness associated with the wave mode increases the propagation speed linked with this mode also increases.
6. NDT Applications
6.1. Application of the Bragg Networks to Detect the Wave Propagation in Prismatic Wave Guided
6.2. The Acustic Emission Propagation in Guided Wave
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
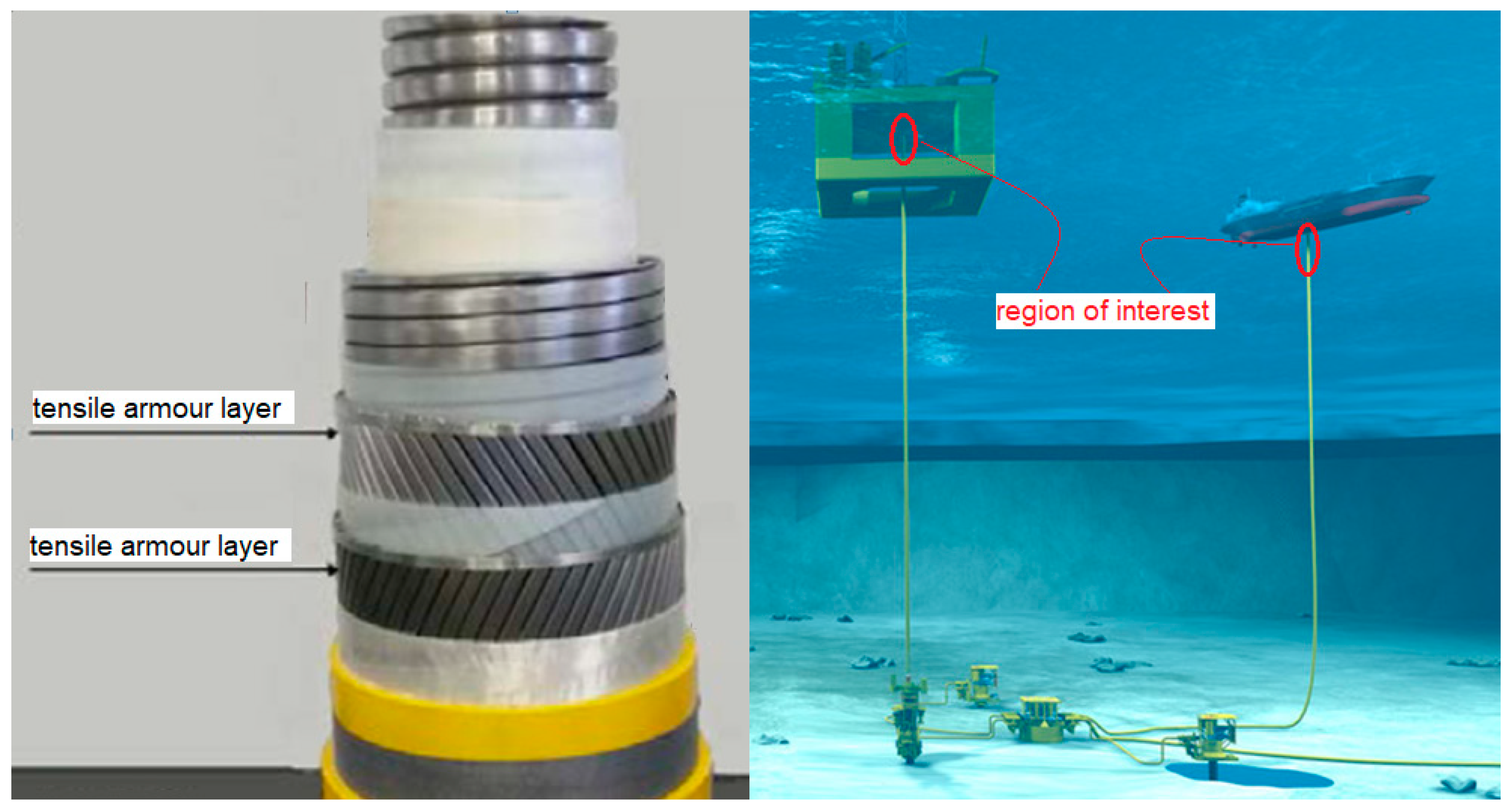
- Costa, C.H.O.; Roitman, N.; Magluta, C.; Ellwangwer, G.B. Caracterização das propriedades mecânicas das Camadas de um Riser Felxível. In Proceedings of the 2° Congresso Brasileiro de P&D em Petróleo & Gás, Rio de Janeiro, Brazil, 15–18 June 2003. [Google Scholar]
- Li, J.Y.; Qiu, Z.X.; Ju, J.S. Numerical Modeling and Mechanical Analyses of Flexible Risers. Math. Probl. Eng. 2015, 1–7. [Google Scholar]
- Balageas, D.; Fritzen, C.P.; Güemes, A. Structural Health Monitoring, 1st ed.; ISTE Ltd.: London, UK, 2006. [Google Scholar]
- Raghavan, A. Guided-Wave Structural Health Monitoring. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2007. [Google Scholar]
- Staszewski, W.J. Structural Health Monitoring Using Guided Ultrasonic Waves. In Advances in Smart Technologies in Structural Engineering; Holnicki-Szulc, J., Soares, C.A.M., Eds.; Springer: New York, NY, USA, 2004; pp. 117–162. [Google Scholar]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar]
- Eagle, D.M. Fundamentals of Acoustic Emission Testing: Wave Propagation. In NDT Handbook Vol. 6, 3rd ed.; Moore, P.O., Ed.; American Society for Nondestructive Testing Inc.: Columbus, OH, USA, 2005; pp. 79–99. [Google Scholar]
- Auld, A.B. Acoustic Fields and Waves in Solids; Wiley: New York, NY, USA, 1973; Volume II. [Google Scholar]
- Achenbach, J.D. Wave Propagation in Elastic Solids; Elsevier: Amsterdam, The Nederlands, 1973. [Google Scholar]
- Mindlin, R.D.; Fox, E.A. Vibrations and Waves in Elastic Bars of Rectangular Cross Section. J. Appl. Mech. ASME 1960, 27, 152–158. [Google Scholar] [CrossRef]
- Graff, K.F. Wave Motion in Elastic Solids; Dover Publications: New York, NY, USA, 1975. [Google Scholar]
- Morse, R.W. The Velocity of Compressional Waves in Rods of Rectangular Cross Section. JASA 1950, 22, 219–223. [Google Scholar] [CrossRef]
- Cegla, F.B. Energy concentration at the center of large aspect ratio rectangular waveguides at high frequencies. JASA 2008, 123, 4218–4226. [Google Scholar] [CrossRef] [Green Version]
- Lamb, H. On Waves in an Elastic Plate. Proc. R. Soc. Lond. 1917, 648, 114–128. [Google Scholar]
- Bruneau, M.; Potel, C. Materials and Acoustic Handbook; ISTE: London, UK, 2006. [Google Scholar]
- Duan, W.; Gan, T. Investigation of guided wave properties of anisotropic composites laminates using a semi-analytical finite element method. Compos. Part B. 2019, 150, 144–156. [Google Scholar] [CrossRef]
- Mindlin, R.D.; Deresiewicz, H. Timoshenko’s Shear Coefficient for Flexural Vibrations of Beams; Technical Report; Columbia University: New York, NY, USA, 1953. [Google Scholar]
- Abramson, H.N.; Plass, H.J.; Ripperger, E.A. Stress wave propagation in rods and beams. Arch. Appl. Mech. 1958, 5, 111–194. [Google Scholar] [CrossRef]
- Lowe, M.S.J.; Pavlakovic, B.N. Disperse User Manual, Version 2.0.11d Imperial College of Science; Technology and Medicine: London, UK, 2001. [Google Scholar]
- Hayashi, T.; Song, W.; Rose, J.L. Guided wave dispersion curves for a bar with an arbitrary cross-section, a rod and rail example. Ultrasonics 2003, 41, 175–183. [Google Scholar] [CrossRef]
- Predoi, M. Guided waves dispersion equations for orthotropic multilayered pipes solved using standard finite elements code. Ultrasonics 2014, 54, 1825–1831. [Google Scholar] [CrossRef]
- Bartoli, I.; Marzani, A.; Di Scalea, F.L.; Viola, E. Modeling wave propagation in damped waveguides with arbitrary cross-section. J. Sound Vib. 2006, 205, 685–707. [Google Scholar] [CrossRef]
- Lagasse, P.E. Higher-order finite-element analysis of topographic guides supporting elastic surface waves. JASA 1973, 53, 1116–1122. [Google Scholar] [CrossRef]
- Aalami, B. Waves in prismatic guides of arbitrary cross section. J. Appl. Mech. 1973, 40, 1067–1072. [Google Scholar] [CrossRef]
- Sorohan, S.; Constatantin, N.; Gavan, M. Anghel Extraction of dispersion curves for waves propagating in free complex waveguides by finite element codes. Ultrasonics 2011, 51, 503–515. [Google Scholar] [CrossRef] [PubMed]
- Packo, P.; Uhl, T.; Staszewski, W.J. Generalizaded semi-analytical finite difference method for dispersion curve calculation and numerical dispersion analysis for Lamb waves. JASA 2014, 136, 993–1002. [Google Scholar] [CrossRef]
- Zuo, P.; Zhou, Y.; Fan, Z. Numerical studies of nonlinear ultrasonic guided waves in uniform waveguides with arbitrary cross sections. AIP Adv. 2016, 6, 075–207. [Google Scholar] [CrossRef] [Green Version]
- Pedroi, M.; Castaings, M.; Hosten, B.; Bacon, C. Wave propagation along transversely periodic structures. JASA 2007, 121, 1935–1944. [Google Scholar] [CrossRef]
- COMSOL Multiphysics Reference Manual Version 4.4; COMSOL A. B. USA: Burlington, MA, USA, 2013.
- Castellaro, S. The complementarity of H/V and dispersion curves. Geophysics 2016, 81, 323–338. [Google Scholar] [CrossRef]
- Thierry, V.; Mesnil, O.; Chronopoulos, D. Experimental and numerical determination of the wave dispersion characteristics of complex 3D woven composites. Ultrasonics 2020, 103. [Google Scholar] [CrossRef]
- Thierry, V.; Brown, L.; Chronopoulos, D. Multi-scale wave propagation modelling for two-dimensional periodic textile composites. Compos. Part B 2018, 150, 144–156. [Google Scholar] [CrossRef] [Green Version]
- Groth, E.B. Propagação de ondas de tensão em hastes retangulares no intervalo de frequência de (0;100 [kHz]). Master’s Thesis, Federal University of Rio Grande do Sul, Porto Alegre, Brazil, 2015. [Google Scholar]
- Ansys ANSYS Mechanical User’s Guide; Ansys Inc.: Canonsburg, PA, USA, 2013.
- Alleyne, D.; Cawley, P. A two-dimensional Fourier transform method for the measurement of propagating multimode signals. JASA 1990, 89, 1159–1168. [Google Scholar] [CrossRef]
- Groth, E.; Clarke, T.R.; Iturrioz, I. The Dispersion Curve Applied in Guided Wave Propagation in Prismatic Rods. Lat. Am. J. Solids Struct. 2018, 15, 1–15. [Google Scholar] [CrossRef]
- ABNT NBR NM 87:2000. Carbon Steel and Alloy Steel for General Engineering Purpose-Designation and Chemical Composition; Brazilian Association of Technical Norms: Janeiro, Brazil, 2000. [Google Scholar]
- National Labview User Manual; National Instruments Corporation: Austin, TX, USA, 2003.
- MatLab MATLAB Primer; The MathWors, Inc.: Natick, MA, USA, 2017.
- Barker, L.M. Laser Interferometry in Shock-wave Research. Exp. Mech. 1972, 12, 209–215. [Google Scholar] [CrossRef]
- Stern, A. Sampling of linear canonical transformed signals. Signal Process 2006, 86, 1421–1425. [Google Scholar] [CrossRef]
- Hallquist, J.O. LS-DYNA Theory Manual; Livermore Software Technology Corporation: Livermore, CA, USA, 2006. [Google Scholar]
- Barauskas, R.; Abraitiene, A. Computational analysis of impact of bullet against the multilayer fabrics in LS-DYNA. Int. J. Impact Eng. 2007, 34, 1286–1305. [Google Scholar] [CrossRef]
- Li, J.; Fang, X. Stress Wave Analysis and optical force measurement of Servo-Hydraulic Machine for High Strain Rate Testing. Exp. Mech. 2014, 54, 1497–1501. [Google Scholar] [CrossRef]
- Thurston, R.N. Elastic Waves in Rods and Optical Fibers. J. Sound Vib. 1992, 159, 441–467. [Google Scholar] [CrossRef]
- Yu, F.T.S.; Yin, S. Fiber Optic Sensors; Marcel Dekker, Inc.: New York, NY, USA, 2002. [Google Scholar]
- Boffa, N.D.; Monaco, E.; Ricci, F. Memmolo Hybrid Strctural Health Monitoring on composite plates with embedded and secondary bonded Fiber Gratings arrays and piezoelectric patches. In Proceedings of the 11th International Symposium on NDT in Aerospace, Paris-Saclay, France, 13–15 November 2019. [Google Scholar]
- Mohammad, A.; Matheson, C.; Ridgeway, L. Application of piezoelectric MFC sensors and Fiber Bragg Grating sensors in structural health monitoring of composite materials. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, SPIE, CA, USA, 9 July 2019. [Google Scholar]
- Grosse, C.U.; Ohtsu, M. Acoustic Emission Testing; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Carpinteri, A.; Lacidogna, G.; Puzzi, S. From criticality to final collapse: Evolution of the b-value from 1.5 to 1.0. Chaos Solitons Fractals 2009, 41, 843–853. [Google Scholar] [CrossRef]
- Riera, J.D. Local effects in impact problems on concrete structures. In Proceedings of the Conference on Structural Analysis and Design of Nuclear Power Plants, Porto Alegre, Brazil, October 1984; Volume 3, p. 83. [Google Scholar]
- Hillerborg, A. A Model for Fracture Analysis; Cod. LUTVDG/TV BM-3005): Lund, Swede, 1978; pp. 1–8. [Google Scholar]
- Kosteski, L.; Iturrioz, I.; Batista, R.G.; Cisilino, A.P. The truss-like discrete element method in fracture and damage mechanics. Eng. Comp. 2011, 6, 765–787. [Google Scholar] [CrossRef]
- Kosteski, L.E.; Barrios, R.; Iturrioz, I. Crack propagation in elastic solids using the truss-like discrete element method. Int. J. Fract. 2012, 174, 139–161. [Google Scholar] [CrossRef]
- Kosteski, L.E.; Iturrioz, I.; Cisilino, A.P.; D’ambra, R.B.; Pettarin, V.; Fasce, L.; Frontini, P. A lattice discrete element method to model the falling-weight impact test of PMMA specimens. Int. J. Impact Eng. 2016, 87, 120–131. [Google Scholar] [CrossRef]
- Kosteski, L.E.; Iturrioz, I.; Lacidogna, G.; Carpinteri, A. Size effect in heterogeneous materials analyzed through a lattice discrete element method approach. Eng. Fract. Mech. 2020, 232. [Google Scholar] [CrossRef]
- Birck, G.; Iturrioz, I.; Lacidogna, G.; Carpinteri, A. Damage process in heterogeneous materials analyzed by a lattice model simulation. Eng. Fail. Anal. 2016, 70, 157–176. [Google Scholar] [CrossRef]
- Iturrioz, I.; Lacidogna, G.; Carpinteri, A. Experimental analysis and truss-like discrete element model simulation of concrete specimens under uniaxial compression. Eng. Fract. Mech. 2013, 110, 81–98. [Google Scholar] [CrossRef]
- Iturrioz, I.; Lacidogna, G.; Carpinteri, A. Acoustic emission detection in concrete specimens: Experimental analysis and lattice model simulations. Int. J. Damage Mech. 2013, 23, 327–358. [Google Scholar] [CrossRef]
- Schumacher da Silva, G.; Kosteski, L.E.; Iturrioz, I. Analysis of the failure process by using the Lattice Discrete Element Method in the Abaqus environment. Theor. A Fract. Mech. 2020, 107. [Google Scholar] [CrossRef]
- Borges Favaro, M. Correlação Numérica-Experimental da Redução da Vida em Fadiga de Dutos Flexíveis Operando com Anular Alagado na Presença de CO2. DSc. Thesis, Federal University of Rio Grande do Sul, UFRGS, Porto Alegre, Brazil, 2017. Available online: https://www.lume.ufrgs.br/handle/10183/172110 (accessed on 20 June 2020).
- Groth, E.; Schumajer, G.; Iturrioz, I.; Kosteski, L.E.; Clarke, T.R. Acoustic Emission Propagation in a Prismatic Guided Wave: Simulations Using Lattice Discrete Element Method. In Progress of the Acoustic Emission IIIAE, Proceedings of the International Conference on Acoustic Emission, Kyoto, Japan, 5–8 December 2016; Volume 1, pp. 1–6. [Google Scholar]
- Moore, P.O. Acoustical Emission testing Handbook, 3rd ed.; 6 American Society of non destructive testing; Library of Congress: Washington, DC, USA, 2005; ISBN 1-57117-106-1. [Google Scholar]
- Lacidogna, G.; Piana, G.; Accornero, F.; Carpinteri, A. Multi-technique damage monitoring of concrete beams: Acoustic Emission, Digital Image Correlation, Dynamic Identification. Constr. Build. Mater. 2020, 242, 118114. [Google Scholar] [CrossRef]
- Carpinteri, A.; Lacidogna, G.; Corrado, M.; Di Battista, E. Cracking and crackling in concrete-like materials: A dynamic energy balance. Eng. Fract. Mech. 2016, 155, 130–144. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Analytic Dispersion Function |
|---|---|
| Longitudinal | |
| Torsional | |
| Flexural |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Groth, E.B.; Clarke, T.G.R.; Schumacher da Silva, G.; Iturrioz, I.; Lacidogna, G. The Elastic Wave Propagation in Rectangular Waveguide Structure: Determination of Dispersion Curves and Their Application in Nondestructive Techniques. Appl. Sci. 2020, 10, 4401. https://doi.org/10.3390/app10124401
Groth EB, Clarke TGR, Schumacher da Silva G, Iturrioz I, Lacidogna G. The Elastic Wave Propagation in Rectangular Waveguide Structure: Determination of Dispersion Curves and Their Application in Nondestructive Techniques. Applied Sciences. 2020; 10(12):4401. https://doi.org/10.3390/app10124401
Chicago/Turabian StyleGroth, Eduardo Becker, Thomas Gabriel Rosauro Clarke, Guilherme Schumacher da Silva, Ignacio Iturrioz, and Giuseppe Lacidogna. 2020. "The Elastic Wave Propagation in Rectangular Waveguide Structure: Determination of Dispersion Curves and Their Application in Nondestructive Techniques" Applied Sciences 10, no. 12: 4401. https://doi.org/10.3390/app10124401