
A Deep Learning Model for Detecting Cage-Free Hens on the Litter Floor




Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Setup
2.2. Date Acquisition
2.3. Data Labeling
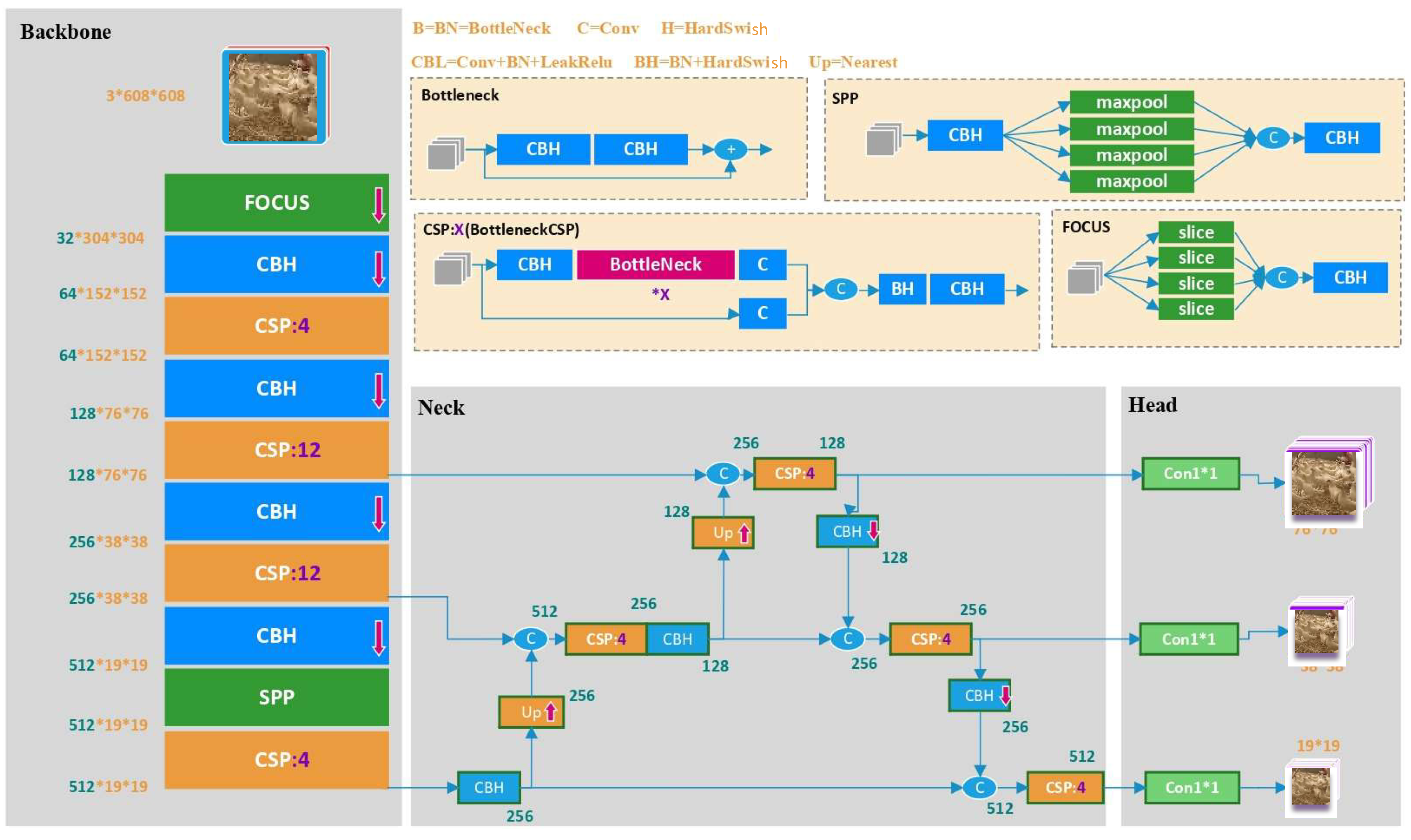
2.4. Model Innovation for Detecting Chickens
2.5. Model Evaluation and Statistical Data Analysis
3. Results and Discussion
3.1. Performance of the YOLOv5x-Hens
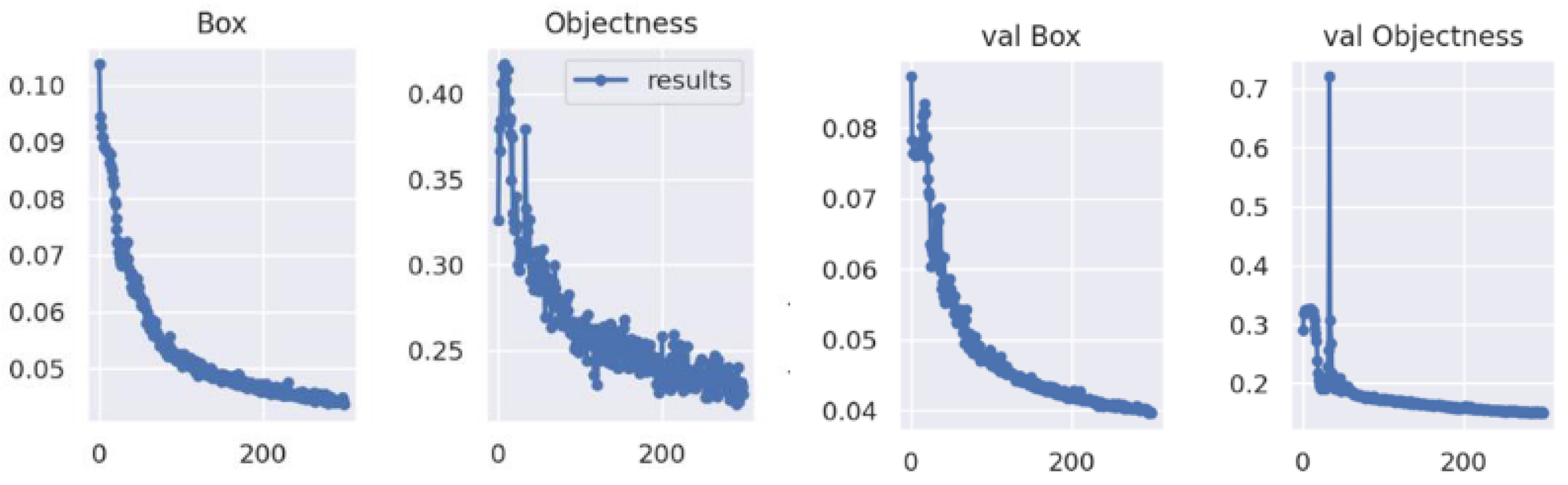
3.2. Convergence Results of Object Detector
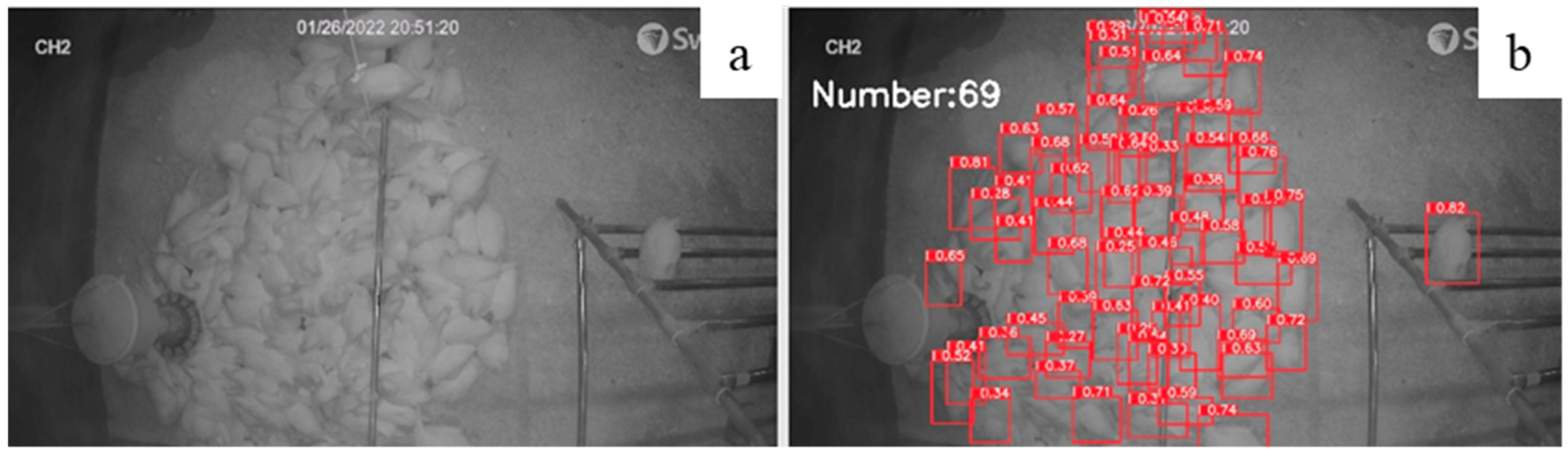
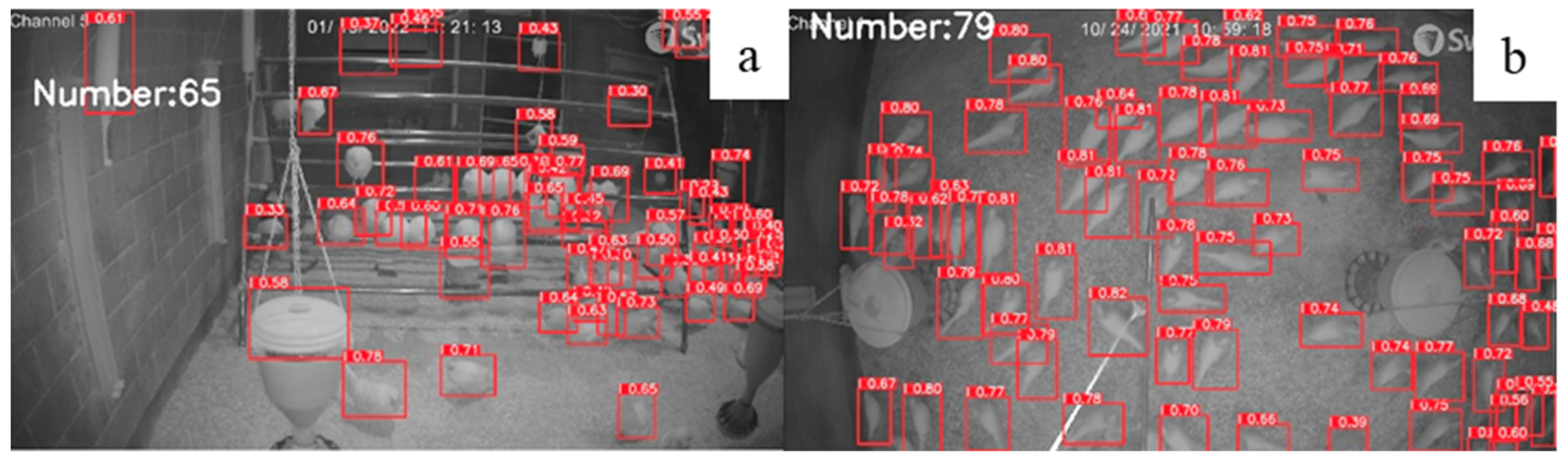
3.3. Evaluation of Model Performance under Different Level of Light Intensity
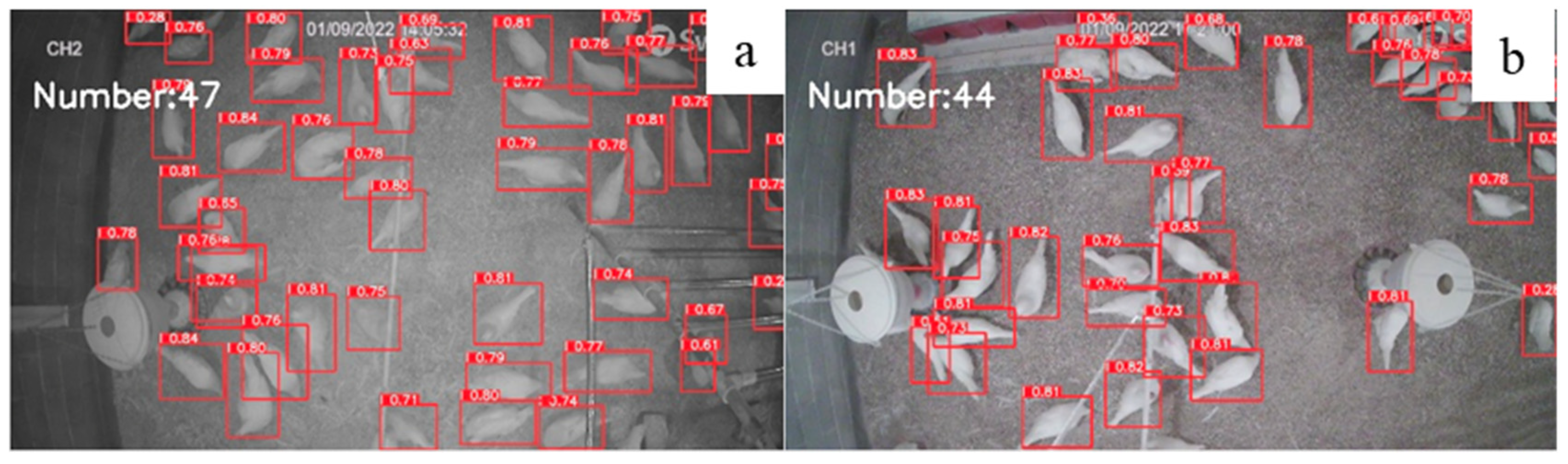
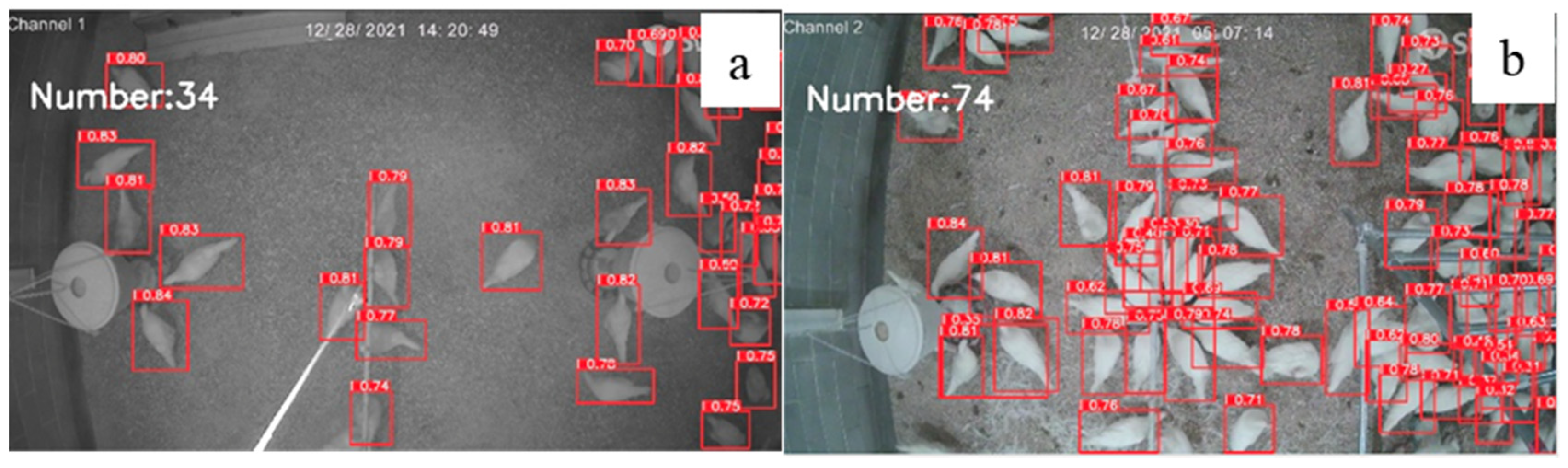
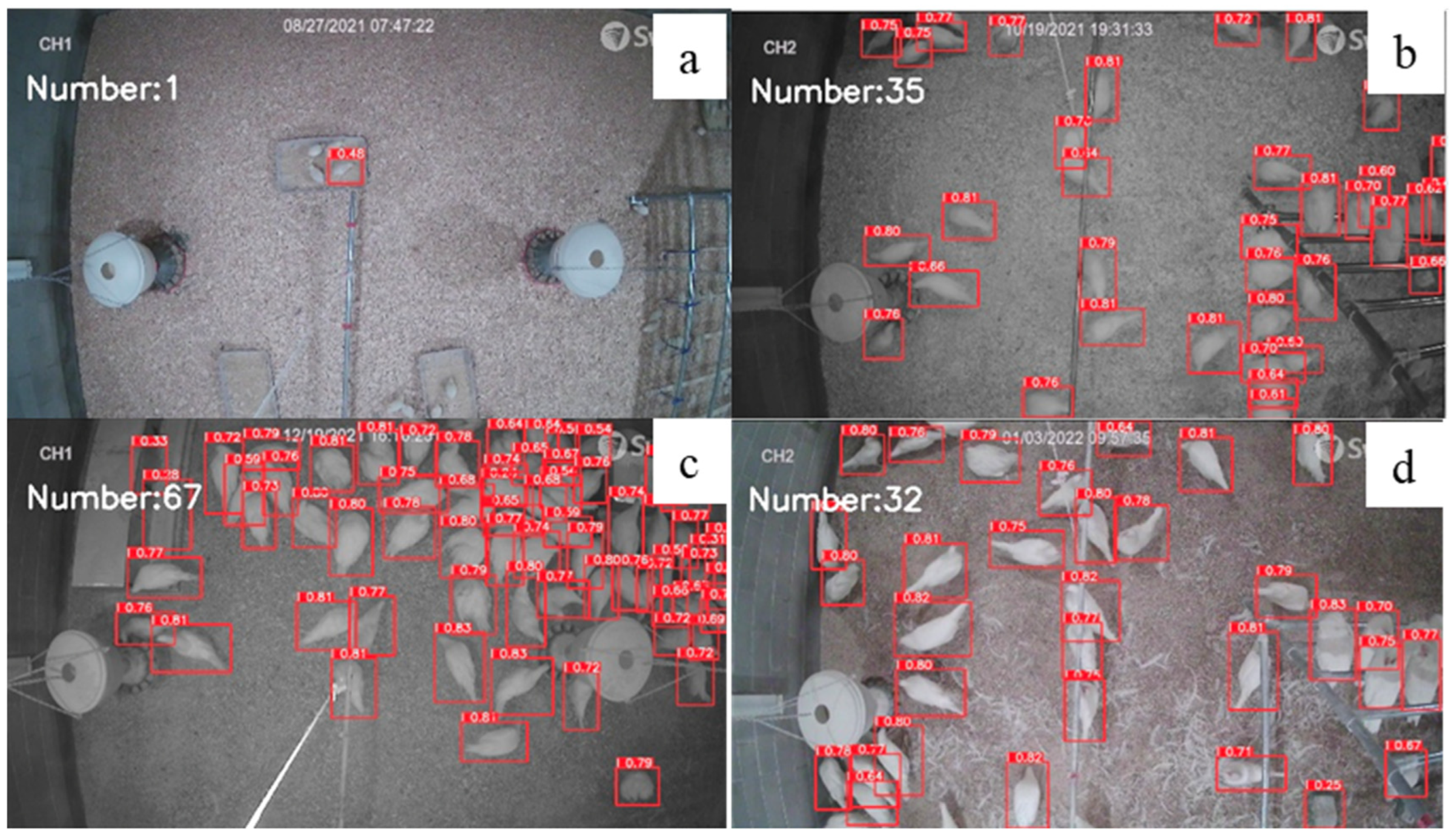
3.4. Evaluation of Model Performance under Different Level of Flock Density
3.5. Performance of YOLOv5x-Hens under Different Angles
3.6. Performance of YOLOv5x-Hens under Different Ages of Birds
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abas, A.M.F.M.; Azmi, N.A.; Amir, N.S.; Abidin, Z.Z.; Shafie, A.A. Chicken Farm Monitoring System. In Proceedings of the 6th International Conference on Computer and Communication Engineering (ICCCE 2016), Chengdu, China, 23–26 April 2021; IEEE: New York, NY, USA, 2016; pp. 132–137. [Google Scholar]
- Faroqi, A.; Utama, A.N.; Ramdhani, M.A.; Mulyana, E. Design Of a Cage Temperature Monitoring System and Microcontroller Base On Automatic Chicken. In Proceedings of the 2020 6th International Conference on Wireless and Telematics (ICWT), Yogyakarta, Indonesia, 3–4 September 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Stadig, L.M.; Rodenburg, T.B.; Ampe, B.; Reubens, B.; Tuyttens, F.A.M. An Automated Positioning System for Monitoring Chickens’ Location: Effects of Wearing a Backpack on Behaviour, Leg Health and Production. Appl. Anim. Behav. Sci. 2018, 198, 83–88. [Google Scholar] [CrossRef]
- Brannan, K.E.; Anderson, K.E. Examination of the Impact of Range, Cage-Free, Modified Systems, and Conventional Cage Environments on the Labor Inputs Committed to Bird Care for Three Brown Egg Layer Strains. J. Appl. Poult. Res. 2021, 30, 100118. [Google Scholar] [CrossRef]
- Hartcher, K.M.; Jones, B. The Welfare of Layer Hens in Cage and Cage-Free Housing Systems. World’s Poult. Sci. J. 2017, 73, 767–782. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Huang, Y.; Chen, Z.; Chesser, G.D.; Purswell, J.L.; Linhoss, J.; Zhao, Y. Practices and Applications of Convolutional Neural Network-Based Computer Vision Systems in Animal Farming: A Review. Sensors 2021, 21, 1492. [Google Scholar] [CrossRef]
- Tillett, R.D.; Onyango, C.M.; Marchant, J.A. Using Model-Based Image Processing to Track Animal Movements. Comput. Electron. Agric. 1997, 17, 249–261. [Google Scholar] [CrossRef]
- Lind, N.M.; Vinther, M.; Hemmingsen, R.P.; Hansen, A.K. Validation of a Digital Video Tracking System for Recording Pig Locomotor Behaviour. J. Neurosci. Methods 2005, 143, 123–132. [Google Scholar] [CrossRef] [PubMed]
- Kashiha, M.; Pluk, A.; Bahr, C.; Vranken, E.; Berckmans, D. Development of an Early Warning System for a Broiler House Using Computer Vision. Biosyst. Eng. 2013, 116, 36–45. [Google Scholar] [CrossRef]
- Neves, D.P.; Mehdizadeh, S.A.; Tscharke, M.; Nääs, I.D.A.; Banhazi, T.M. Detection of Flock Movement and Behaviour of Broiler Chickens at Different Feeders Using Image Analysis. Inf. Processing Agric. 2015, 2, 177–182. [Google Scholar] [CrossRef] [Green Version]
- Avanzato, R.; Beritelli, F. An Innovative Acoustic Rain Gauge Based on Convolutional Neural Networks. Information 2020, 11, 183. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, M.S.; Mahmud, M.Z.; Akhter, S. Musical Genre Classification on the Marsyas Audio Data Using Convolution NN. In Proceedings of the 2020 23rd International Conference on Computer and Information Technology (ICCIT 2020), Dhaka, Bangladesh, 19–21 December 2020; IEEE: New York, NY, USA, 2020; p. 243. [Google Scholar]
- Chan, T.K.; Chin, C.S.; Li, Y. Semi-Supervised NMF-CNN for Sound Event Detection. IEEE Access 2021, 9, 130529–130542. [Google Scholar] [CrossRef]
- Li, G.; Hui, X.; Chen, Z.; Chesser, G.D.; Zhao, Y. Development and Evaluation of a Method to Detect Broilers Continuously Walking around Feeder as an Indication of Restricted Feeding Behaviors. Comput. Electron. Agric. 2021, 181, 105982. [Google Scholar] [CrossRef]
- Lin, C.-Y.; Hsieh, K.-W.; Tsai, Y.-C.; Kuo, Y.-F. Automatic Monitoring of Chicken Movement and Drinking Time Using Convolutional Neural Networks. Trans. ASABE 2020, 63, 2029–2038. [Google Scholar] [CrossRef]
- Ye, C.; Yousaf, K.; Qi, C.; Liu, C.; Chen, K. Broiler Stunned State Detection Based on an Improved Fast Region-Based Convolutional Neural Network Algorithm. Poult. Sci. 2020, 99, 637–646. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, N.; Li, L.; Ren, Z. Real-Time Behavior Detection and Judgment of Egg Breeders Based on YOLO V3. Neural Comput. Appl. 2020, 32, 5471–5481. [Google Scholar] [CrossRef]
- Ye, C.; Yu, Z.; Kang, R.; Yousaf, K.; Qi, C.; Chen, K.; Huang, Y. An Experimental Study of Stunned State Detection for Broiler Chickens Using an Improved Convolution Neural Network Algorithm. Comput. Electron. Agric. 2020, 170, 105284. [Google Scholar] [CrossRef]
- Ding, A.; Zhang, X.; Zou, X.; Qian, Y.; Yao, H.; Zhang, S.; Wei, Y. A Novel Method for the Group Characteristics Analysis of Yellow Feather Broilers Under the Heat Stress Based on Object Detection and Transfer Learning. INMATEH Agric. Eng. 2019, 58, 49–58. [Google Scholar] [CrossRef]
- Zhuang, X.; Zhang, T. Detection of Sick Broilers by Digital Image Processing and Deep Learning. Biosyst. Eng. 2019, 179, 106–116. [Google Scholar] [CrossRef]
- Liu, H.; Li, C.; Jia, S.; Zhang, D. Text Detection for Dust Image Based on Deep Learning. In Proceedings of the 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanjing, China, 18–20 May 2018; pp. 754–759. [Google Scholar]
- Yan, T.; Wang, L.J.; Wang, J.X. Video Image Enhancement Method Research in the Dust Environment. Laser J. 2014, 35, 23–25. [Google Scholar]
- Lusk, J.L. Consumer Preferences for Cage-Free Eggs and Impacts of Retailer Pledges. Agribusiness 2019, 35, 129–148. [Google Scholar] [CrossRef]
- Oh, S.E.; Vukina, T. The Price of Cage-Free Eggs: Social Cost of Proposition 12 in California. Am. J. Agric. Econ. 2022, 104, 1293–1326. [Google Scholar] [CrossRef]
- Walia, I.S.; Kumar, D.; Sharma, K.; Hemanth, J.D.; Popescu, D.E. An Integrated Approach for Monitoring Social Distancing and Face Mask Detection Using Stacked ResNet-50 and YOLOv5. Electronics 2021, 10, 2996. [Google Scholar] [CrossRef]
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 Based on Transformer Prediction Head for Object Detection on Drone-Captured Scenarios. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW 2021), Montreal, BC, Canada, 11–17 October 2021; IEEE Computer Soc: Los Alamitos, CA, USA, 2021; pp. 2778–2788. [Google Scholar]
- Wang, H.; Hu, Z.; Guo, Y.; Yang, Z.; Zhou, F.; Xu, P. A Real-Time Safety Helmet Wearing Detection Approach Based on CSYOLOv3. Appl. Sci. Basel 2020, 10, 6732. [Google Scholar] [CrossRef]
- Zhang, M.; Che, W.; Zhou, G.; Aw, A.; Tan, C.L.; Liu, T.; Li, S. Semantic Role Labeling Using a Grammar-Driven Convolution Tree Kernel. IEEE Trans. Audio Speech Lang. Process. 2008, 16, 1315–1329. [Google Scholar] [CrossRef]
- Fan, Y.; Li, Y.; Shi, Y.; Wang, S. Application of YOLOv5 Neural Network Based on Improved Attention Mechanism in Recognition of Thangka Image Defects. KSII Trans. Internet Inf. Syst. 2022, 16, 245–265. [Google Scholar] [CrossRef]
- Zhu, L.; Geng, X.; Li, Z.; Liu, C. Improving YOLOv5 with Attention Mechanism for Detecting Boulders from Planetary Images. Remote Sens. 2021, 13, 3776. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, F.; Huang, L.; Shi, J.; Yang, J.; Li, Z. A Lightweight One-Stage Defect Detection Network for Small Object Based on Dual Attention Mechanism and PAFPN. Front. Phys. 2021, 9, 491. [Google Scholar] [CrossRef]
- Yamashita, R.; Nishio, M.; Do, R.K.G.; Togashi, K. Convolutional Neural Networks: An Overview and Application in Radiology. Insights Imaging 2018, 9, 611–629. [Google Scholar] [CrossRef] [Green Version]
- Mosqueira-Rey, E.; Alonso-Ríos, D.; Baamonde-Lozano, A. Integrating Iterative Machine Teaching and Active Learning into the Machine Learning Loop. Procedia Comput. Sci. 2021, 192, 553–562. [Google Scholar] [CrossRef]
- Shukla, A.; Hudemann, K.N.; Hecker, A.; Schmid, S. Runtime Verification of P4 Switches with Reinforcement Learning. In Proceedings of the Netai’19: Proceedings of the 2019 Acm Sigcomm Workshop on Network Meets Ai & Ml, Beijing, China, 23 August 2019; Assoc Computing Machinery: New York, NY, USA, 2019; pp. 1–7. [Google Scholar]
- Wang, W.; Chen, Y.; Wang, J.; Lv, Z.; Li, E.; Zhao, J.; Liu, L.; Wang, F.; Liu, H. Effects of Reduced Dietary Protein at High Temperature in Summer on Growth Performance and Carcass Quality of Finishing Pigs. Animals 2022, 12, 599. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, R.; Lin, Y.; Li, C.; Chen, S.; Yuan, Z.; Chen, S.; Zou, X. Plant Disease Recognition Model Based on Improved YOLOv5. Agronomy 2022, 12, 365. [Google Scholar] [CrossRef]
- Chen, C.-H.; Lai, Y.-K. The Influence Measures of Light Intensity on Machine Learning for Semantic Segmentation. In Proceedings of the 2020 17th International Soc Design Conference (ISOCC 2020), Yeosu, Korea, 21–24 October 2020; IEEE: New York, NY, USA, 2020; pp. 199–200. [Google Scholar]
- Mahyari, T.L.; Dansereau, R.M. Deep Learning Methods for Image Segmentation Containing Translucent Overlapped Objects. In Proceedings of the 2019 7th IEEE Global Conference on Signal and Information Processing (IEEE Globalsip), Ottawa, ON, Canada, 11–14 November 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Cheng, D.; Rong, T.; Cao, G. Density Map Estimation for Crowded Chicken. In Proceedings of the Image and Graphics-10th International Conference, ICIG 2019, Beijing, China, 23–25 August 2019; Zhao, Y., Barnes, N., Chen, B., Westermann, R., Kong, X., Lin, C., Eds.; Springer International Publishing Ag: Cham, Switzerland, 2019; Volume 11903, pp. 432–441. [Google Scholar]
- Li, G.; Zhao, Y.; Porter, Z.; Purswell, J.L. Automated Measurement of Broiler Stretching Behaviors under Four Stocking Densities via Faster Region-Based Convolutional Neural Network. Animal 2021, 15, 100059. [Google Scholar] [CrossRef] [PubMed]
- Geffen, O.; Yitzhaky, Y.; Barchilon, N.; Druyan, S.; Halachmi, I. A Machine Vision System to Detect and Count Laying Hens in Battery Cages. Animal 2020, 14, 2628–2634. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| YOLOv5s | YOLOv5m | YOLOv5l | YOLOv5x | Function | |
|---|---|---|---|---|---|
| Depth_multiple | 0.33 | 0.67 | 1.00 | 1.33 | Model scaling [26] |
| Width_multiple | 0.50 | 0.75 | 1.00 | 1.25 | Model scaling [26] |
| ResNet in CSPNet | 12 | 24 | 36 | 48 | Computational loan [27] |
| Convolution kernel | 512 | 768 | 1024 | 1280 | Feature extraction [28] |
| Items | Precision | Recall | F1 Score | mAP@0.5 |
|---|---|---|---|---|
| YOLOv3 [29] | 0.988 | 0.875 | 0.926 | / |
| YOLOv5x-hens | 0.958 | 0.954 | 0.956 | 0.948 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Chai, L.; Bist, R.B.; Subedi, S.; Wu, Z. A Deep Learning Model for Detecting Cage-Free Hens on the Litter Floor. Animals 2022, 12, 1983. https://doi.org/10.3390/ani12151983
Yang X, Chai L, Bist RB, Subedi S, Wu Z. A Deep Learning Model for Detecting Cage-Free Hens on the Litter Floor. Animals. 2022; 12(15):1983. https://doi.org/10.3390/ani12151983
Chicago/Turabian StyleYang, Xiao, Lilong Chai, Ramesh Bahadur Bist, Sachin Subedi, and Zihao Wu. 2022. "A Deep Learning Model for Detecting Cage-Free Hens on the Litter Floor" Animals 12, no. 15: 1983. https://doi.org/10.3390/ani12151983