
Currents Analysis of a Brushless Motor with Inverter Faults—Part II: Diagnostic Method for Open-Circuit Fault Isolation

Abstract
:1. Introduction
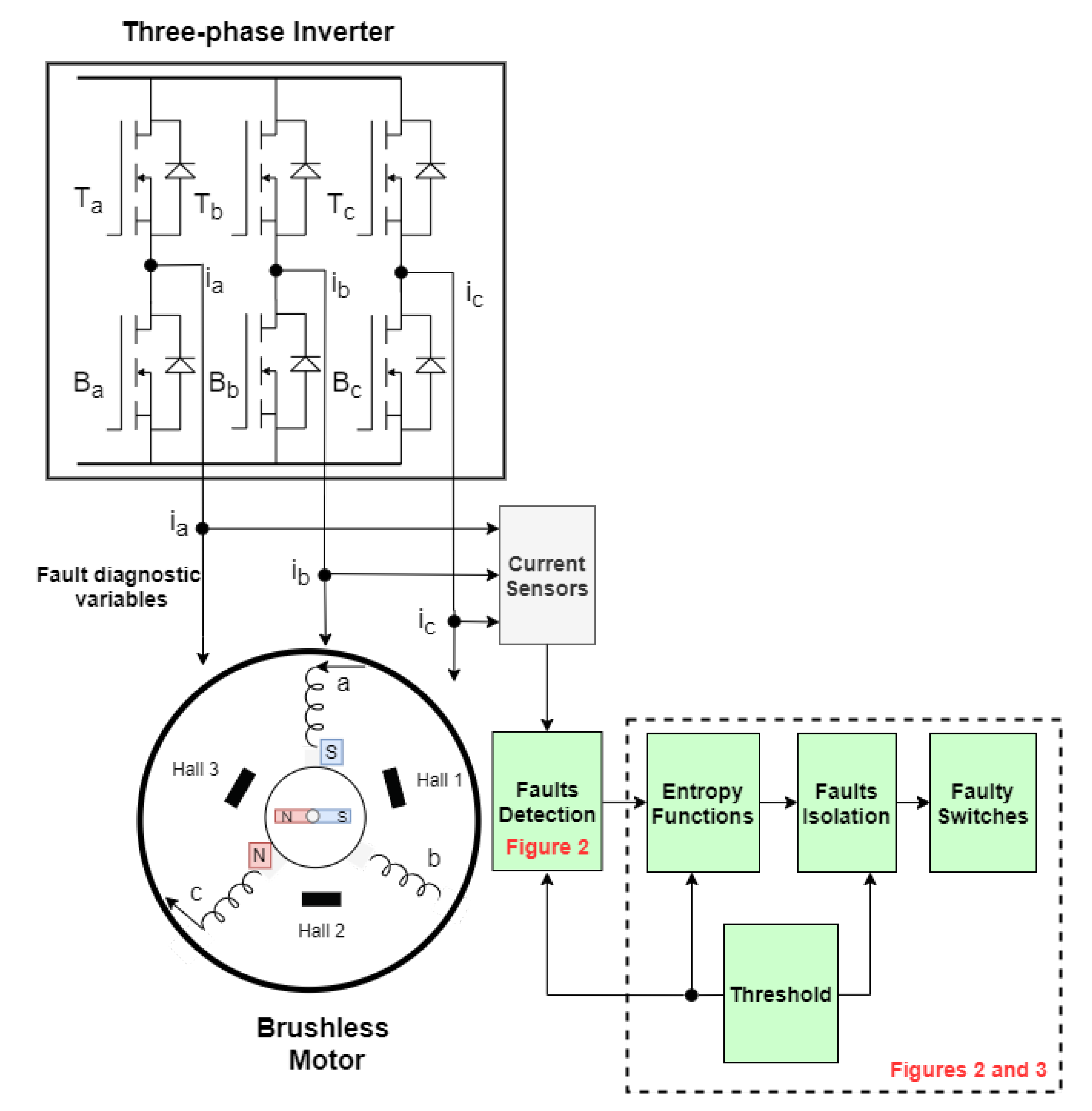
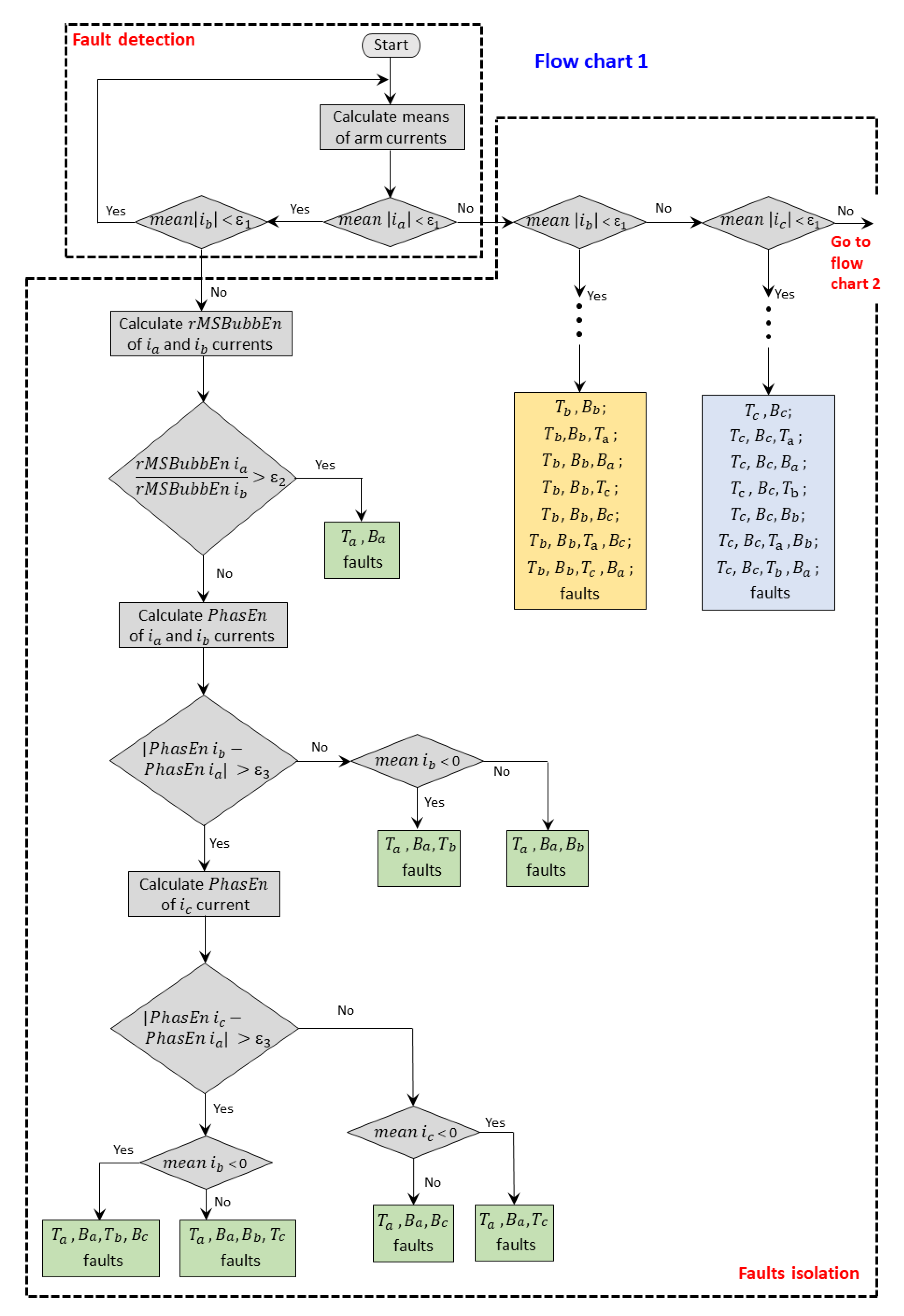
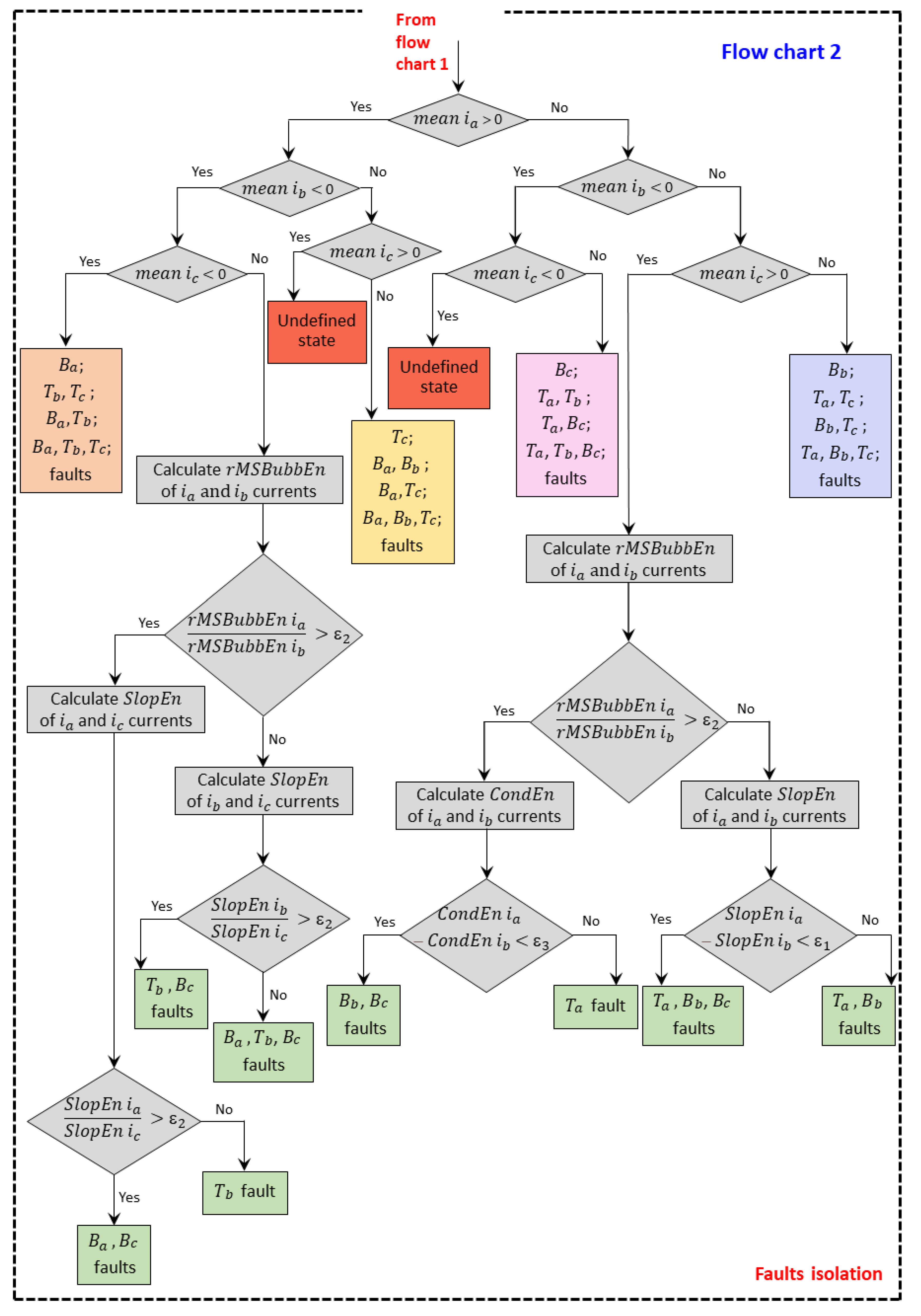
2. Fault Location with the Fault Diagnostic Method
- , : mean of = 0.0006, mean of = 0.2708, mean of = −0.2714;
- , , : mean of = 0.0004, mean of = −2.6371, mean of = 2.6367;
- , , : mean of = 0.0044, mean of = 2.9920, mean of = −2.9964;
- , , : mean of = 0.0025, mean of = 2.4690, mean of = −2.4715;
- , , : mean of = 0.0032, mean of = −2.8272, mean of = 2.8304;
- , , , : mean of = 0.0016, mean of = −2.6055, mean of = 2.6038;
- , , , : mean of = 0.0041, mean of = 3.0170, mean of = −3.0211.
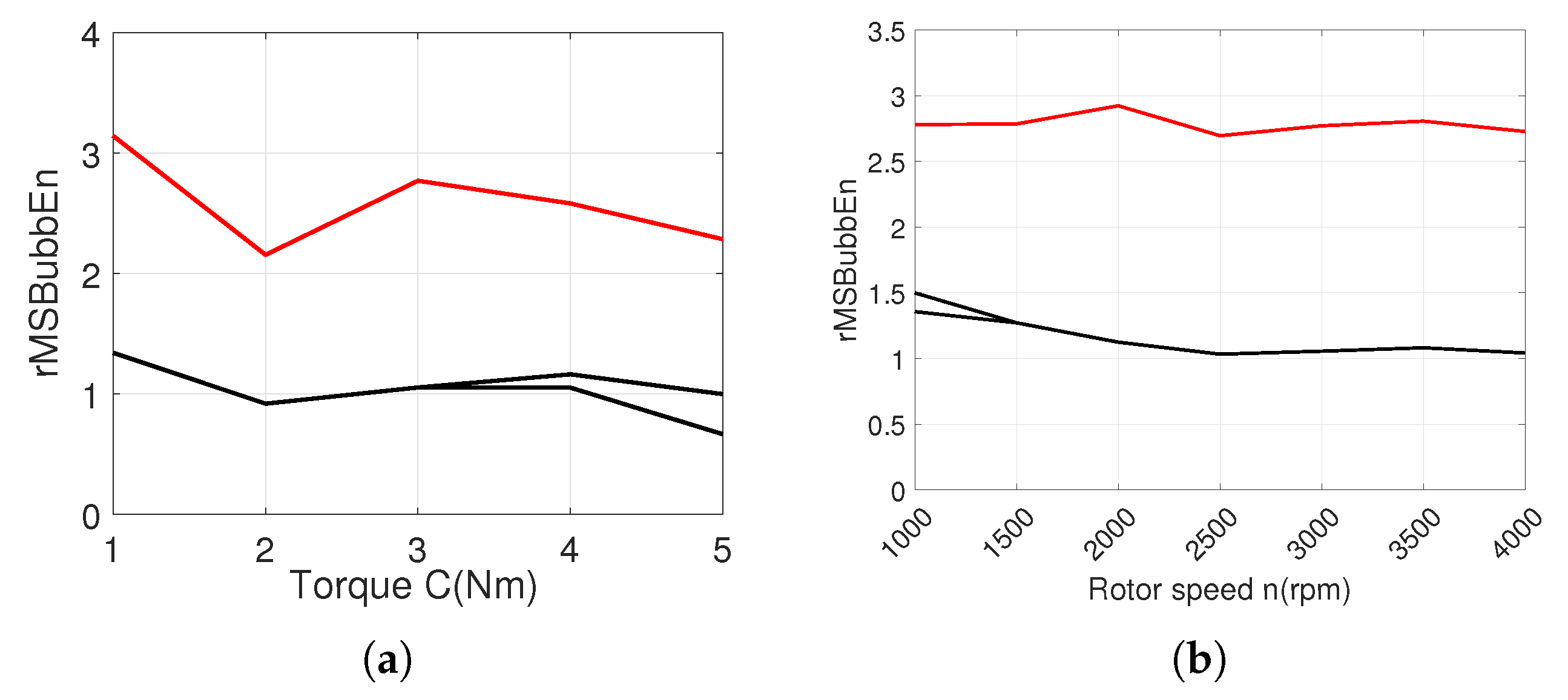
3. Entropy Evaluation under Load and Speed Variations
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Puthiyapurayil, M.R.M.K.; Nasirudeen, M.N.; Saywan, Y.A.; Ahmad, W.; Malik, H. A Review of Open-Circuit Switch Fault Diagnostic Methods for Neutral Point Clamped Inverter. Electronics 2022, 11, 3169. [Google Scholar] [CrossRef]
- Choi, U.M.; Blaabjerg, F.; Lee, K.B. Study and handling methods of power IGBT module failures in power electronic converter systems. IEEE Trans. Power Electron. 2015, 30, 2517–2533. [Google Scholar] [CrossRef]
- An, Q.; Sun, L.K.; Zhao, K.; Sun, L. Switching function model-based fast-diagnostic method of open-switch faults in inverters without sensors. IEEE Trans. Power Electron. 2011, 26, 119–126. [Google Scholar] [CrossRef]
- Lu, B.; Sharma, S. A literature review of IGBT fault diagnostic and protection methods for power inverters. IEEE Trans. Ind. Appl. 2009, 45, 1770–1777. [Google Scholar]
- Mendes, A.M.S.; Abadi, M.B.; Cruz, S.M.A. Fault diagnostic algorithm for three-level neutral point clamped AC motor drives based on average current Park’s vector. IET Power Electron. 2014, 7, 1127–1137. [Google Scholar] [CrossRef]
- Jung, F.; Zhao, J. A real-time multiple open-circuit fault diagnostic method in voltage-source-inverter fed vector controlled drives. IEEE Trans. Power Electron. 2016, 31, 1425–1437. [Google Scholar]
- Estima, J.O.; Freire, N.M.A.; Cardoso, A.J.M. Recent advances in fault diagnostic by Park’s vector approach. IEEE Workshop Electr. Mach. Des. Control Diagn. 2013, 2, 279–288. [Google Scholar]
- Wu, Y.; Zhang, Z.; Li, Y.; Sun, Q. Open-Circuit Fault diagnostic of Six-Phase Permanent Magnet Synchronous Motor Drive System Based on Empirical Mode Decomposition Energy Entropy. IEEE Access 2021, 9, 91137–91147. [Google Scholar] [CrossRef]
- Sleszynski, W.; Nieznanski, J.; Cichowski, A. Open-transistor fault diagnostics in voltage-source inverters by analyzing the load currents. IEEE Trans. Ind. Electron. 2009, 56, 4681–4688. [Google Scholar] [CrossRef]
- Zhou, D.; Yang, S.; Tang, Y. A Voltage-Based Open-Circuit Fault Detection and Isolation Approach for Modular Multilevel Converters With Model-Predictive Control. IEEE Trans. Power Electron. 2018, 33, 9866–9874. [Google Scholar] [CrossRef]
- Patel, K.; Borole, S.; Manikandan, R.; Singh, R.R. Short Circuit and open-circuit Fault Identification Strategy for 3-Level Neutral Point Clamped Inverter. In Proceedings of the 2021 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 27–29 November 2021; pp. 1–6. [Google Scholar]
- Raj, N.; Mathewb, J.; Ga, J.; George, S. Open-Transistor Fault Detection and diagnostic Based on Current Trajectory in a Two-level Voltage Source Inverter. Procedia Technol. 2016, 25, 669–675. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Huang, W.; Wang, H.; Zheng, W.; Wang, J.; Chai, Y.; Ma, M. A Simultaneous diagnostic Method for Power Switch and Current Sensor Faults in Grid-Connected Three-Level NPC Inverters. IEEE Trans. Power Electron. 2022, 26, 1–15. [Google Scholar]
- Oubabas, H.; Djennoune, S.; Bettayeb, M. Interval sliding mode observer design for linear and nonlinear systems. J. Process. Control 2018, 26, 959–1524. [Google Scholar] [CrossRef]
- Song, B.; Qi, G.; Xu, L. A new approach to open-circuit fault diagnostic of MMC sub-module. Syst. Sci. Control Eng. 2020, 8, 119–127. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Zhao, C.; Li, L.; Zhang, F.; Zhai, X. Sub-module fault diagnostic and local protection scheme for MMC-HVDC system. Proceeding CSEE 2014, 34, 1641–1649. [Google Scholar]
- Wei, H.; Zhang, Y.; Yu, L.; Zhang, M.; Teffah, K. A new diagnostic algorithm for multiple IGBTs open-circuit faults by the phase currents for power inverter in electric vehicles. Energies 2018, 11, 1508. [Google Scholar] [CrossRef] [Green Version]
- Cosimi, F. Analysis and design of a non-linear MPC algorithm for vehicle trajectory tracking and obstacle avoidance. In Applications in Electronics Pervading Industry, Environment and Society: APPLEPIES 2020; Springer International Publishing: Berlin, Germany, 2021; Volume 8. [Google Scholar]
- Campos-Delgado, D.U.; Pecina-Sánchez, J.A.; Espinoza-Trejo, D.R.; Arce-Santana, E.R. Diagnostic of open-switch faults in variable speed drives by stator current analysis and pattern recognition. IET Electr. Power Appl. 2013, 7, 509–522. [Google Scholar] [CrossRef]
- Deng, F.; Chen, Z.; Khan, M.; Zhu, R. Fault Detection and Localization Method for Modular Multilevel Converters. IEEE Trans. Power Electron. 2015, 30, 2721–2732. [Google Scholar] [CrossRef]
- Zhang, Y.; Hu, H.; Liu, Z. Concurrent fault diagnostic of a modular multi-level converter with kalman filter and optimized support vector machine. Syst. Sci. Control Eng. 2019, 7, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Faraz, G.; Majid, A.; Khan, B.; Saleem, J.; Rehman, N. An Integral Sliding Mode Observer Based Fault diagnostic Approach for Modular Multilevel Converter. In Proceedings of the 2019 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Swat, Pakistan, 24–25 July 2019; pp. 1–6. [Google Scholar]
- Shao, S.; Wheeler, P.W.; Clare, J.C.; Watson, A.J. Fault detection for modular multilevel converters based on sliding mode observer. IEEE Trans. Power Electron. 2013, 28, 4867–4872. [Google Scholar] [CrossRef]
- Shao, S.; Watson, A.J.; Clare, J.C.; Wheeler, P.W. Robustness analysis and experimental validation of a fault detection and isolation method for the modular multilevel converter. IEEE Trans. Power Electron. 2016, 31, 3794–3805. [Google Scholar] [CrossRef]
- Li, B.; Shi, S.; Wang, B.; Wang, G.; Wang, W.; Xu, D. Fault diagnostic and tolerant control of single IGBT open-circuit failure in modular multilevel converters. IEEE Trans. Power Electron. 2016, 31, 3165–3176. [Google Scholar] [CrossRef]
- Li, B.; Zhou, S.; Xu, D.; Yang, R.; Xu, D.; Buccella, C.; Cecati, C. An improved circulating current injection method for modular. multilevel converters in variable-speed drives. IEEE Trans. Ind. Electron. 2016, 63, 7215–7225. [Google Scholar] [CrossRef]
- Yang, Q.; Qin, J.; Saeedifard, M. Analysis, detection, and location of open-switch submodule failures in a modular multilevel converter. IEEE Trans. Power Del. 2016, 31, 155–164. [Google Scholar] [CrossRef]
- Abdelsalam, M.; Marei, M.I.; Tennakoon, S. An integrated control strategy with fault detection and tolerant control capability based on capacitor voltage estimation for modular multilevel converters. IEEE Trans. Ind. Appl. 2017, 53, 2840–2851. [Google Scholar] [CrossRef]
- Li, W.; Li, G.; Zeng, R. The fault detection, localization, and tolerant operation of modular multi-level converters with an insulated gate bipolar transistor (IGBT) open-circuit fault. Energies 2018, 11, 837. [Google Scholar] [CrossRef] [Green Version]
- Chakraborty, R.; Samantaray, J.; Chakrabarty, S. Variable gain observer-based estimation of capacitor voltages in modular multi-level converters. In Proceedings of the IEEE International Conference on Power Electronics, Drives & Energy Systems: PEDES, Jaipur, India, 16–19 December 2020; pp. 7–12. [Google Scholar]
- Caseiro, L.M.A.; Mendes, A.M.S. Real-time IGBT open-circuit fault diagnostic in three-level neutral-point-clamped voltage-source rectifiers based on instant voltage error. IEEE Trans. Ind. Electron. 2015, 62, 1669–1678. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Gastli, A.; Ben-Brahim, L.; Al-Emadi, N.; Gabbouj, M. Real-time fault detection and identification. for MMC Using 1-D convolutional neural networks. IEEE Trans. Ind. Electron. 2019, 66, 8760–8771. [Google Scholar] [CrossRef]
- Wang, Q.; Yu, Y.; Hoa, A. Fault detection and classification in MMC-HVDC systems using learning methods. Sensors 2020, 20, 4438. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Cai, F.; Zhang, H.; Zhao, W.; Gerada, C. PWM-VSI fault diagnostic for PMSM drive based on fuzzy logic approach. IEEE Trans. Power Electron. 2018, 34, 759–768. [Google Scholar] [CrossRef]
- Bissey, S.; Jacques, S.; Le Bunetel, J.-C. The Fuzzy Logic Method to Efficiently Optimize Electricity Consumption in Individual Housing. Energies 2017, 10, 1701. [Google Scholar] [CrossRef] [Green Version]
- Morel, C.; Rivero, S.; Le Gueux, B.; Portal, J.; Chahba, S. Currents Analysis of a Brushless Motor with Inverter Faults—Part I: Parameters of Entropy Functions and Open-Circuit Faults Detection. Actuators 2023, 12, 228. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entropy Type | Entropies | Computation Time for Length | Computation Time for Length |
|---|---|---|---|
| Sample Entropy | 1.4441 | 0.1862 | |
| 2.3840 | 0.2977 | ||
| 4.1252 | 0.5084 | ||
| 2.1296 | 0.3278 | ||
| Kolmokov Entropy | 1.5930 | 0.2009 | |
| 2.9755 | 0.3438 | ||
| 3.9457 | 0.4508 | ||
| 2.2020 | 0.2643 | ||
| Conditional Entropy | 1.241 × | 7.548 × | |
| 4.153 × | 2.916 × | ||
| 18.61 × | 18.11 × | ||
| 6.309 × | 4.643 × | ||
| Dispersion Entropy | 2.204 × | 1.501 × | |
| 7.120 × | 4.324 × | ||
| 21.66 × | 19.28 × | ||
| 9.220 × | 7.827 × | ||
| Cosine Similarity Entropy | 1.801 | 0.215 | |
| 2.952 | 0.327 | ||
| 4.107 | 0.489 | ||
| 2.467 | 0.282 | ||
| Bubble Entropy | 1.546 × | 9.429 × | |
| 10.91 × | 5.180 × | ||
| 18.81 × | 16.80 × | ||
| 7.978 × | 4.905 × | ||
| Approximation Entropy | 2.096 | 0.260 | |
| 4.381 | 0.512 | ||
| 5.977 | 0.723 | ||
| 3.081 | 0.373 | ||
| Fuzzy Entropy | 1.213 | 0.156 | |
| 2.278 | 0.281 | ||
| 3.196 | 0.393 | ||
| 1.993 | 0.238 | ||
| Increment Entropy | 1.924 × | 1.058 × | |
| 8.639 × | 5.763 × | ||
| 21.42 × | 16.69 × | ||
| 8.931 × | 7.047 × | ||
| Phase Entropy | 8.168 × | 8.143 × | |
| 3.928 × | 3.159 × | ||
| 15.64 × | 16.62 × | ||
| 6.090 × | 5.229 × | ||
| Slope Entropy | 1.084 × | 8.216 × | |
| 5.801 × | 4.128 × | ||
| 18.56 × | 18.40 × | ||
| 7.102 × | 5.716 × | ||
| Entropy of Entropy | of | 55.20 × | 20.72 × |
| En En | 139.1 × | 49.65 × | |
| En En | 247.6 × | 71.19 × | |
| En En | 118.3 × | 41.33 × | |
| Attention Entropy | 7.306 × | 7.317 × | |
| 3.879 × | 2.768 × | ||
| 14.25 × | 14.04 × | ||
| 6.108 × | 5.036 × |
| No. | Open-Circuit Fault | Number of Operation Type | Total Computation Time |
|---|---|---|---|
| 1. | No fault | 3 mean, 2 if | 8.25 × |
| 2. | 3 mean, 8 if, 2 , 2 | ||
| 3. | 3 mean, 8 if, 2 , 2 | ||
| 4. | 3 mean, 8 if, 2 , 2 | ||
| 5. | 3 mean, 8 if, 2 , 2 | ||
| 6. | 3 mean, 8 if, 2 , 2 | ||
| 7. | 3 mean, 8 if, 2 , 2 | ||
| 8. | , | 3 mean, 3 if, 2 | |
| 9. | , | 3 mean, 3 if, 2 | |
| 10. | , | 3 mean, 4 if, 2 | |
| 11. | , | 3 mean, 8 if, 2 , 2 | |
| 12. | , | 3 mean, 8 if, 2 , 2 | |
| 13. | , | 3 mean, 8 if, 2 , 2 | |
| 14. | , | 3 mean, 8 if, 2 , 2 | |
| 15. | , | 3 mean, 8 if, 2 , 2 | |
| 16. | , | 3 mean, 8 if, 2 , 2 | |
| 17. | , | 3 mean, 8 if, 2 , 2 | |
| 18. | , | 3 mean, 8 if, 2 , 2 | |
| 19. | , | 3 mean, 8 if, 2 , 2 | |
| 20. | , | 3 mean, 8 if, 2 , 2 | |
| 21. | , | 3 mean, 8 if, 2 , 2 | |
| 22. | , | 3 mean, 8 if, 2 , 2 | |
| 23. | , , | 3 mean, 5 if, 2 , 2 | |
| 24. | , , | 3 mean, 5 if, 2 , 2 | |
| 25. | , , | 3 mean, 6 if, 2 , 3 | |
| 26. | , , | 3 mean, 6 if, 2 , 3 | |
| 27. | , , | 3 mean, 5 if, 2 , 2 | |
| 28. | , , | 3 mean, 5 if, 2 , 2 | |
| 29. | , , | 3 mean, 6 if, 2 , 3 | |
| 30. | , , | 3 mean, 6 if, 2 , 3 | |
| 31. | , , | 3 mean, 6 if, 2 , 2 | |
| 32. | , , | 3 mean, 6 if, 2 , 2 | |
| 33. | , , | 3 mean, 7 if, 2 , 3 | |
| 34. | , , | 3 mean, 7 if, 2 , 3 | |
| 35. | , , | 3 mean, 8 if, 2 , 2 | |
| 36. | , , | 3 mean, 8 if, 2 , 2 | |
| 37. | , , | 3 mean, 8 if, 2 , 2 | |
| 38. | , , | 3 mean, 8 if, 2 , 2 | |
| 39. | , , | 3 mean, 8 if, 2 , 2 | |
| 40. | , , | 3 mean, 8 if, 2 , 2 | |
| 41. | , , , | 3 mean, 6 if, 2 , 3 | |
| 42. | , , , | 3 mean, 6 if, 2 , 3 | |
| 43. | , , , | 3 mean, 6 if, 2 , 3 | |
| 44. | , , , | 3 mean, 6 if, 2 , 3 | |
| 45. | , , , | 3 mean, 7 if, 2 , 3 | |
| 46. | , , , | 3 mean, 7 if, 2 , 3 |
| Number of Faults | Total Computation Time (ms) |
|---|---|
| 1 fault | 12.84–12.97 |
| 2 faults | 10.85–12.97 |
| 3 faults | 12.67–13.67 |
| 4 faults | 13.58–13.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morel, C.; Gueux, B.L.; Rivero, S.; Chahba, S. Currents Analysis of a Brushless Motor with Inverter Faults—Part II: Diagnostic Method for Open-Circuit Fault Isolation. Actuators 2023, 12, 230. https://doi.org/10.3390/act12060230
Morel C, Gueux BL, Rivero S, Chahba S. Currents Analysis of a Brushless Motor with Inverter Faults—Part II: Diagnostic Method for Open-Circuit Fault Isolation. Actuators. 2023; 12(6):230. https://doi.org/10.3390/act12060230
Chicago/Turabian StyleMorel, Cristina, Baptiste Le Gueux, Sébastien Rivero, and Saad Chahba. 2023. "Currents Analysis of a Brushless Motor with Inverter Faults—Part II: Diagnostic Method for Open-Circuit Fault Isolation" Actuators 12, no. 6: 230. https://doi.org/10.3390/act12060230